
Towards a Decentralized Magnetic Indoor Positioning System

Abstract
:1. Introduction
- The design of a decentralized positioning system by improving the MILPS and using coil driver units (CDUs), which are based on accurate real-time clocks (RTCs). Furthermore, the MS is extended with a sensor platform, which includes a magnetic field sensor and an RTC. The MS operates independently from the CDUs, and no communication channel is required.
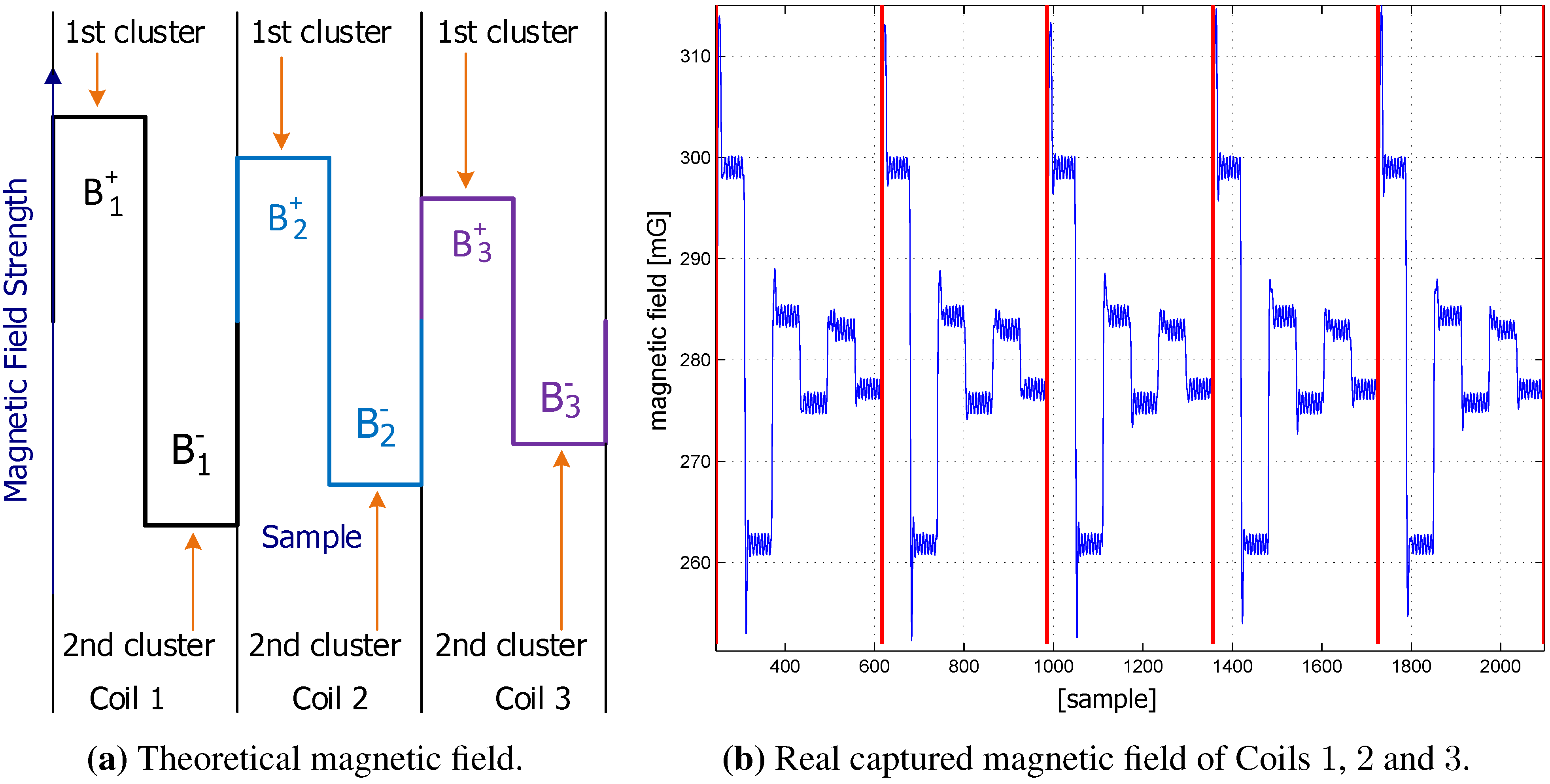
- The application of time division multiple access (TDMA) for the generation of periodic, distortion-free magnetic field signals for a certain time period (e.g., 1 s). The TDMA allows the MS to distinguish between the coils (reference points).
- The evaluation of two approaches to drive and synchronize the coils.
2. Previous and Related Work
2.1. Previous Work


2.2. Related Work

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Magnetic Pos. Systems | Advantages | Disadvantages |
|---|---|---|
| Fingerprinting system | No infrastructure. | Acquisition of magnetic maps in the setup phase. Localization accuracy scales with the finger printing data resolution. |
| Permanent magnet system | High accuracy. Operating under NLoS conditions. | Restricted coverage volume (up to 1 m). Mathematic models with high-order non-linear equations [3]. |
| Current-based system | High accuracy. Operating under NLoS conditions. Not affected by reflections and multipath. | Infrastructure-based. Limited coverage area. Necessity of high power energy or highly sensitive magnetometers for coverage area extension. |
3. Towards a Decentralized MILPS
3.1. Architectural Overview
- Centralized Architecture: This is the most commonly-used architecture, in which the sensors or the MSs exclusively communicate with the base station, which usually possesses more processing power, storage capacity and energy resources than the MSs. The MS modules deliver data to the base station, such as raw sensor data or the results of a signal processing step; normally, with the compression or reduction of the data. The individual MSs have no knowledge about the semantics of the gathered data that are transmitted to and interpreted in the base station. The advantages of a centralized architecture include the usage of lightweight and low-cost MSs, since the whole complexity is shifted to the base station; a high position resolution and a full central overview of the observed phenomenon (e.g., event). The disadvantages comprise single point of failure (e.g., the base station failure), which is not tolerable in a secure scenario; poor performance with a large number of MSs; the system can get into energy starvation in case of continuous communication between the MSs and the base station; and the power-saving techniques are difficult to implement.
- Decentralized and Distributed Architecture: In this architecture, data processing and position computation occur in the mobile station, and no data, except the result of a position finding, are sent to the base station. Furthermore, in a distributed MS network, which is also referred to as collective evaluation [29], the MSs can exchange data, in order to collectively achieve and respectively augment the efficiency and the precision of a positioning task [30]. This can be important in the case of using distributed localization algorithms [31]. The distributed approach also favors cooperative sensing and positioning when multiple MSs are present. The decentralized and the distributed architecture exhibit the following advantages:
- Scalability: the computational load and the communication overhead at each MS do not depend on the MS number.
- Robustness: the system is not affected if an MS or some MSs fail, since no node has a designated role and all nodes can perform the data processing and transferring tasks.
- Energy-awareness: the data traffic between the base station and the MSs is reduced, since this architecture supports on-board or in-network processing, saving both link bandwidth and node energy, which are critically-constrained resources [32].
The drawbacks of the decentralized and distributed architectures are: the MSs have no global knowledge about the network topology or about a phenomenon. Components of the distributed architecture only know about connections in their own neighborhood, which requires a robust and self-healing network. Since the aim of the decentralized or the distributed architecture is on the mobile station or in-network processing, respectively, the use of lightweight and low-cost MSs is not possible. The MS should have a micro-controller unit (MCU) with more computational power and memory capacity, as well as an efficient application layer and, in the case of a distributed evaluation, a communication protocol stack. The distributed position evaluation is not the focus of this paper. We use the decentralized architecture due to the scalability, robustness and energy-awareness and on-the-fly capability of the MS.
3.2. Mobile Station and Coil Drive Unit Architecture

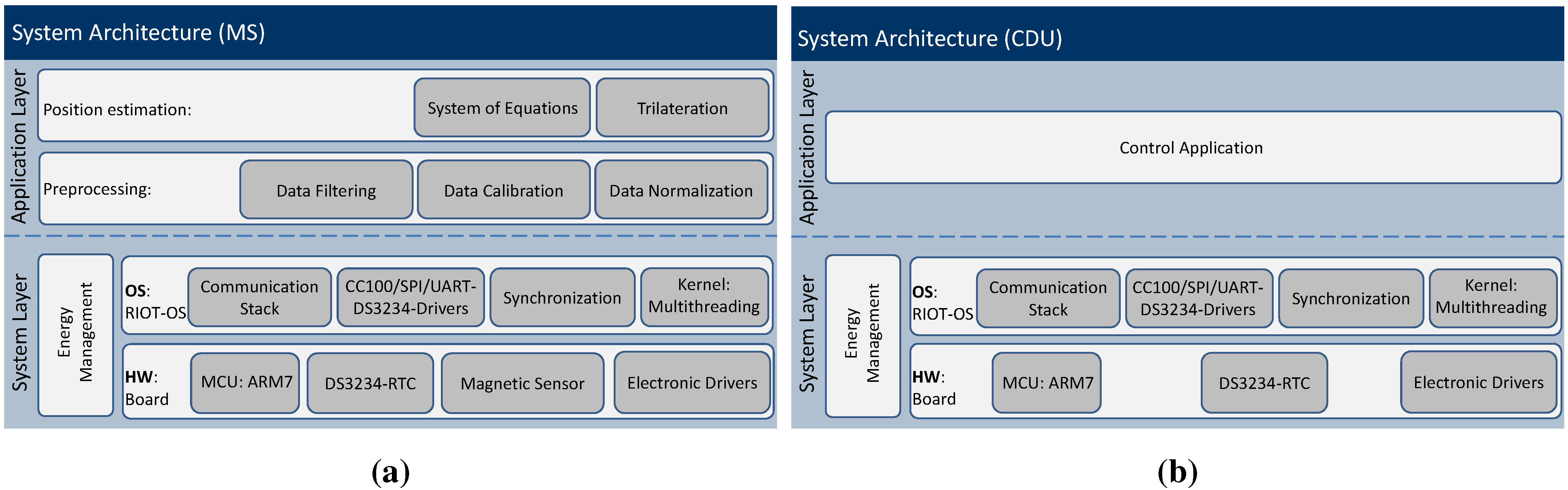
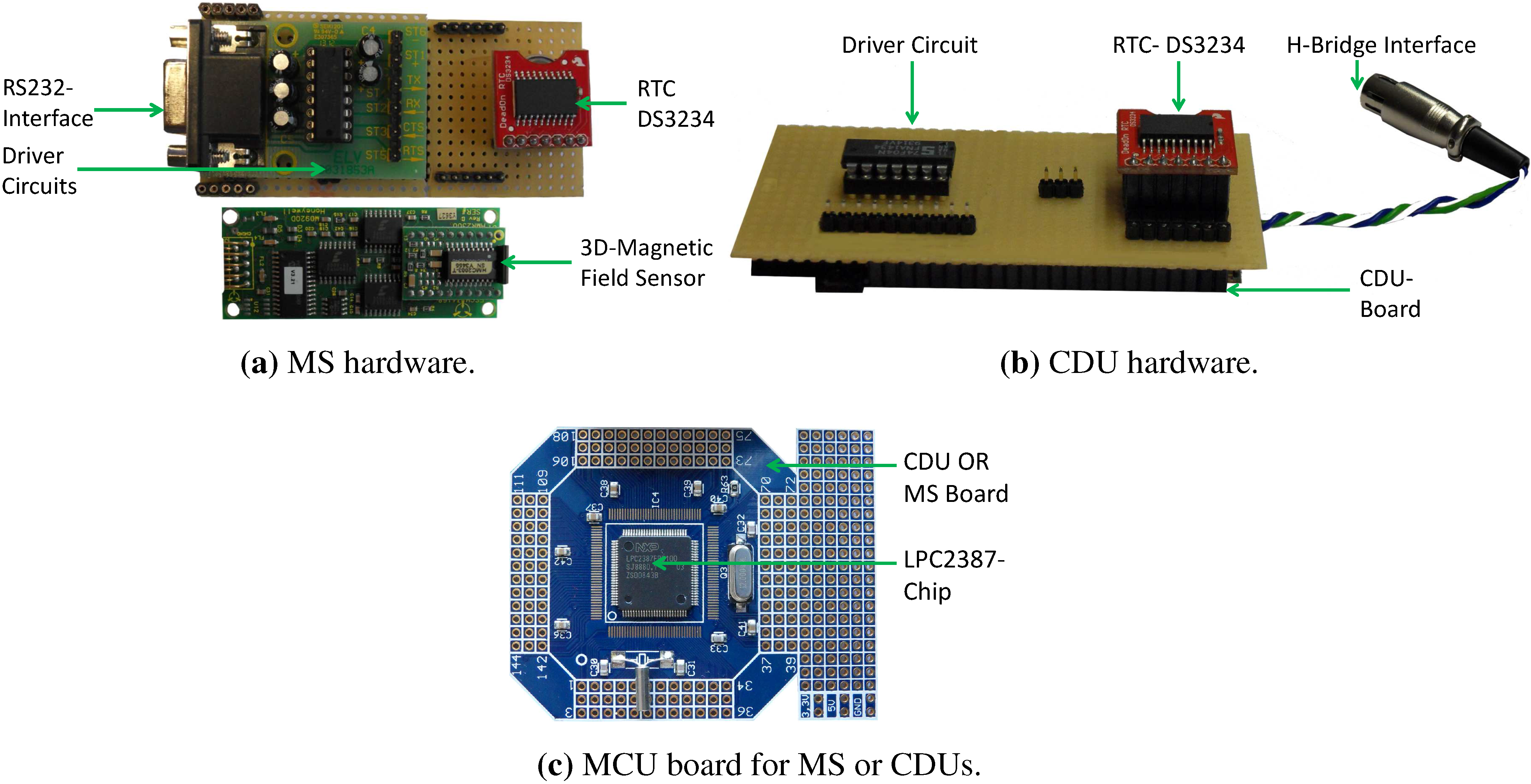
3.2.1. Hardware

3.2.2. Operating System: RIOT-OS
| OS | Architecture | Scheduling | Programming Language | Programming Model |
|---|---|---|---|---|
| FreeRTOS | Monolithic | Round-robin preemptive and cooperative | C | Threads |
| TinyOS | Monolithic | FIFO | nesC | Primarily event driven, support for TOSThreads |
| Contiki | Modular | Event based | C with some constraints | Protothreads and events |
| RIOT-OS | Microkernel | Tickless, preemptive scheduling with priorities | C and C++ | Threads |
| Interrupt Types | Cycles | Time in μs |
|---|---|---|
| Interrupt latency | 50 | |
| Context switch outside an ISR | 72 | |
| Context switch | 600 | |
| Inter-process communication (IPC) delay | 1300 | 18 |
3.2.3. Device Drivers
3.3. Synchronization
3.3.1. Stability and Accuracy of Oscillators
3.3.2. Timing and Synchronization on Resource-Constrained Devices
3.3.3. Synchronization Scheme Based on Real-Time Clocks

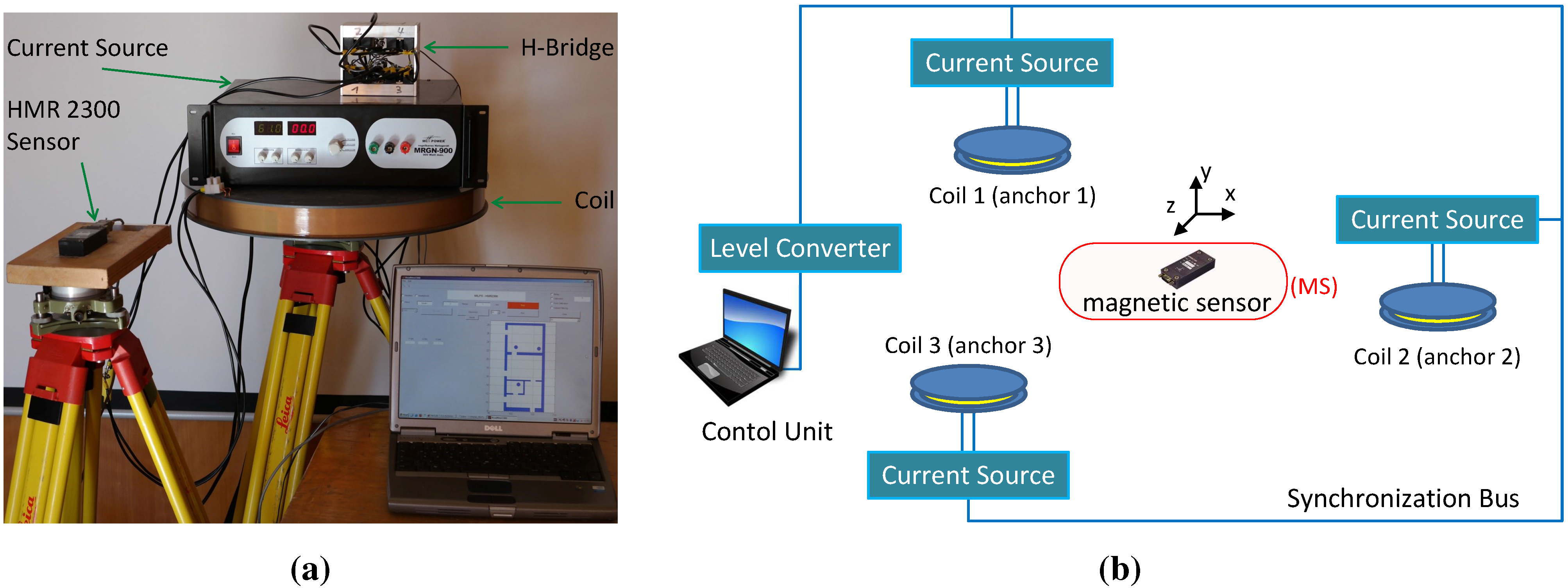
- The initialization phase: Both the RTCs of the CDUs and the MS are set to the same time. This phase is initiated by a user with the help of a serial splitter or wireless connection: the RTC is integrated in the CDU and the MS via the SPI-interface. Once the initialization is complete, the system enters the operating mode.
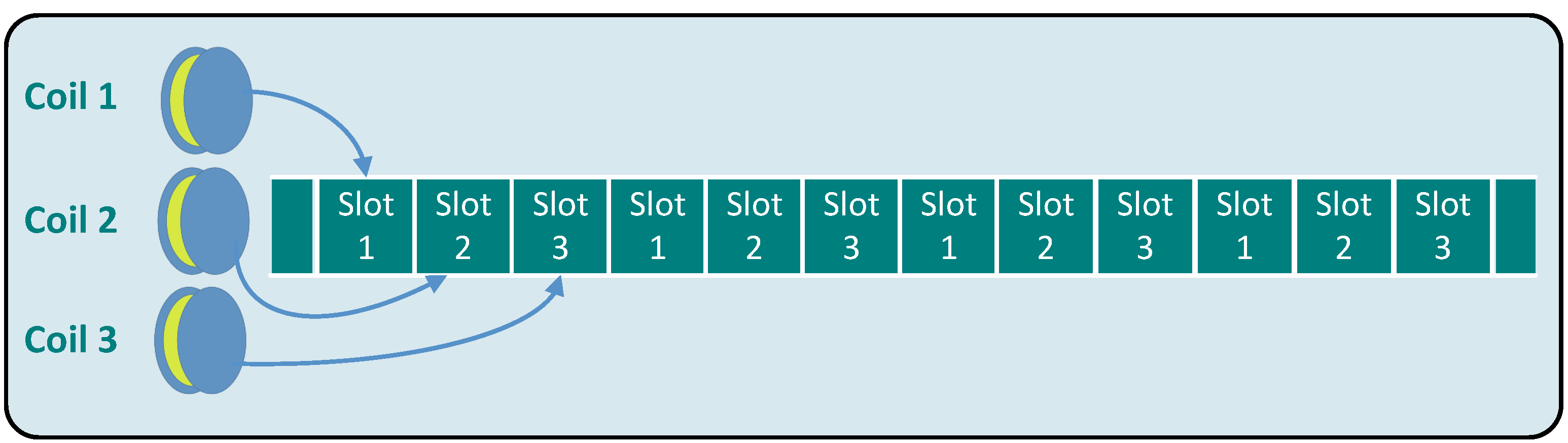
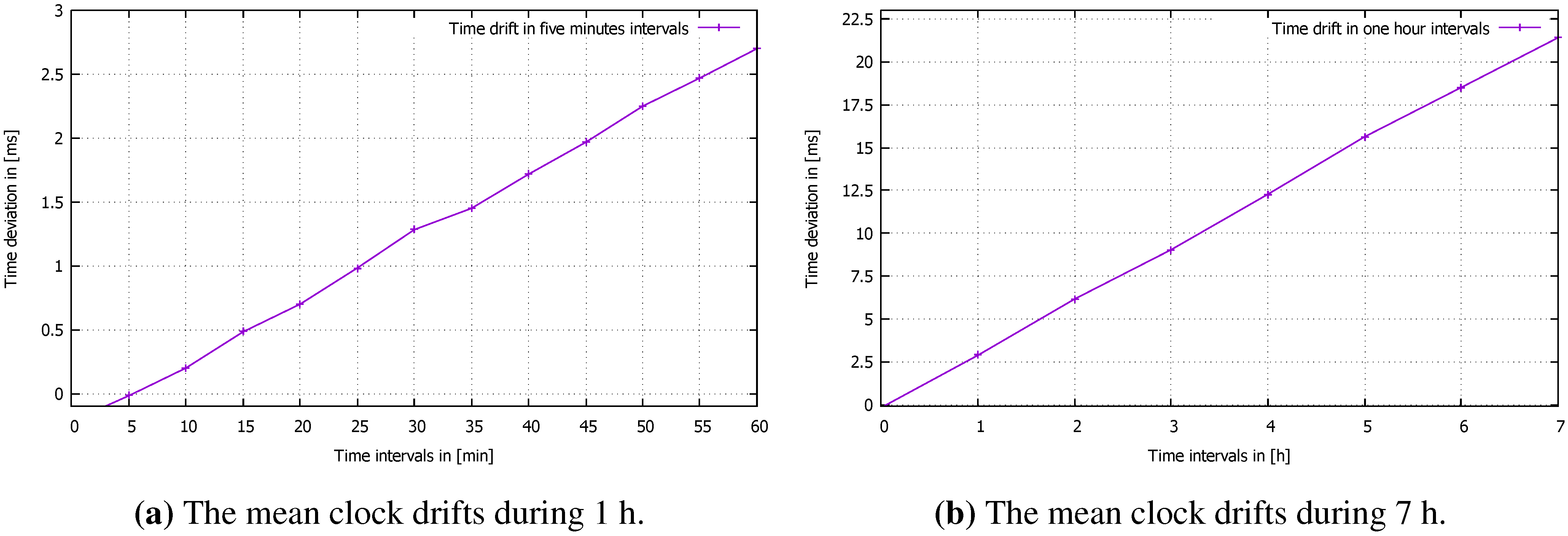
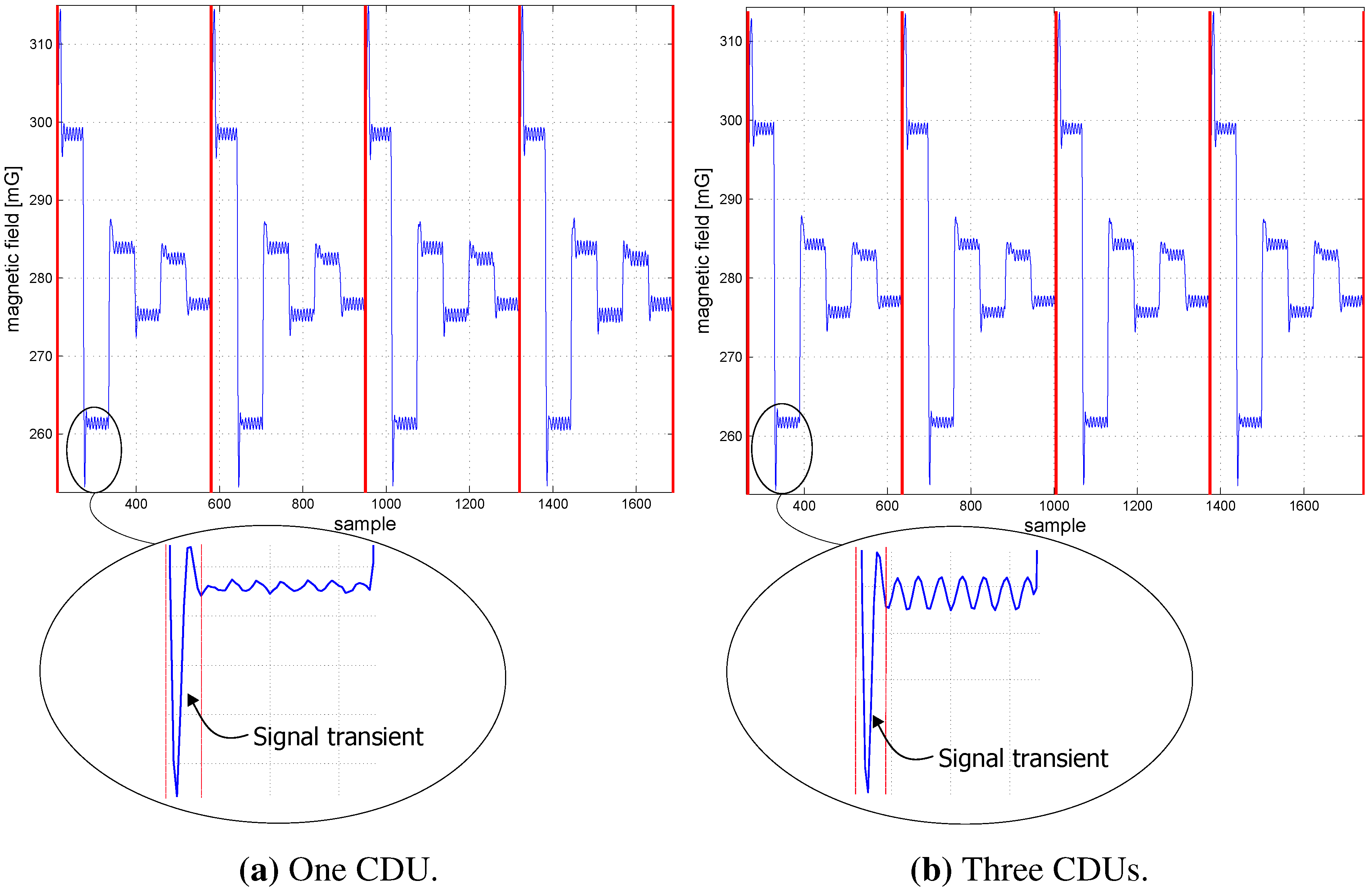
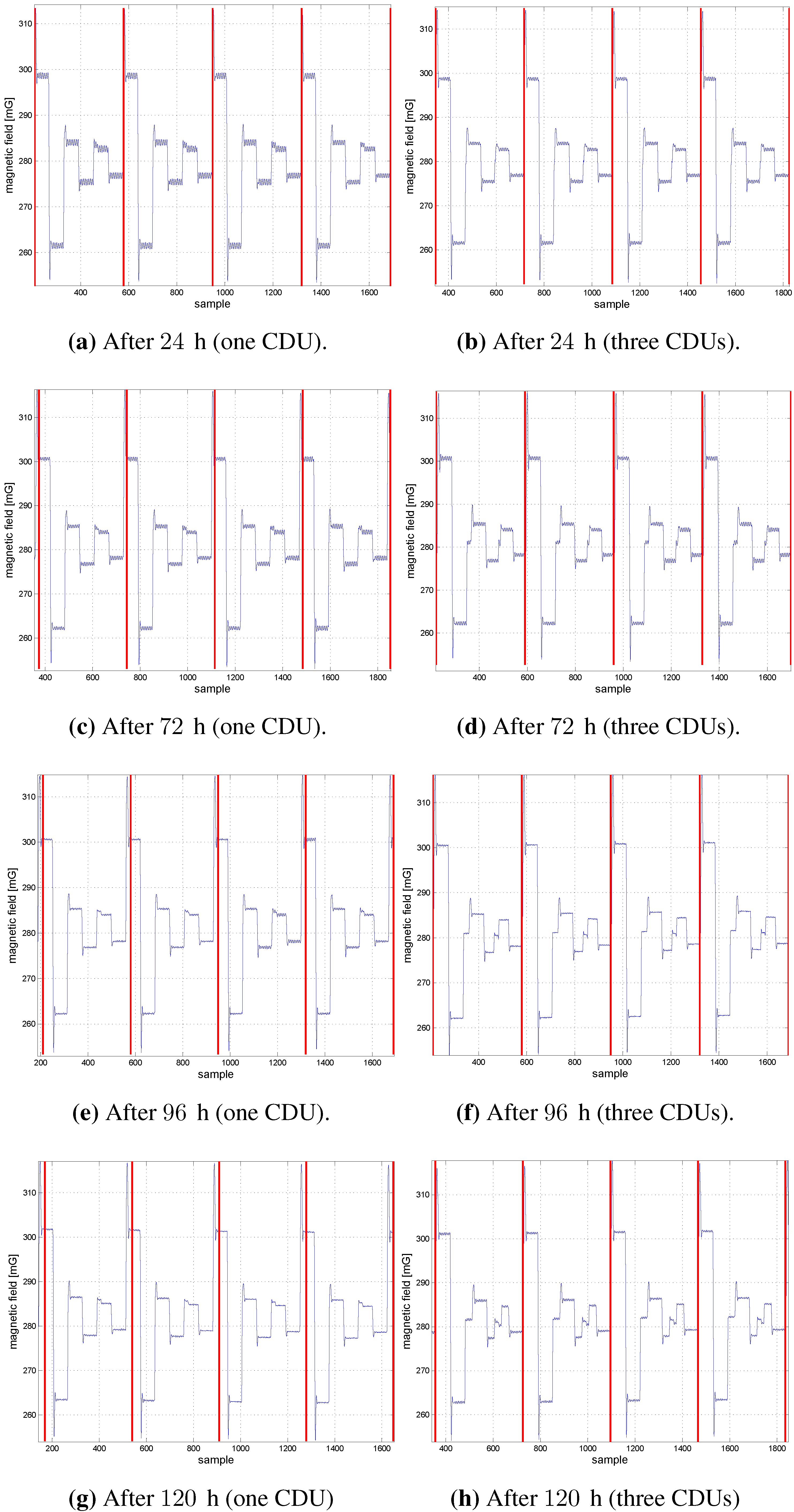
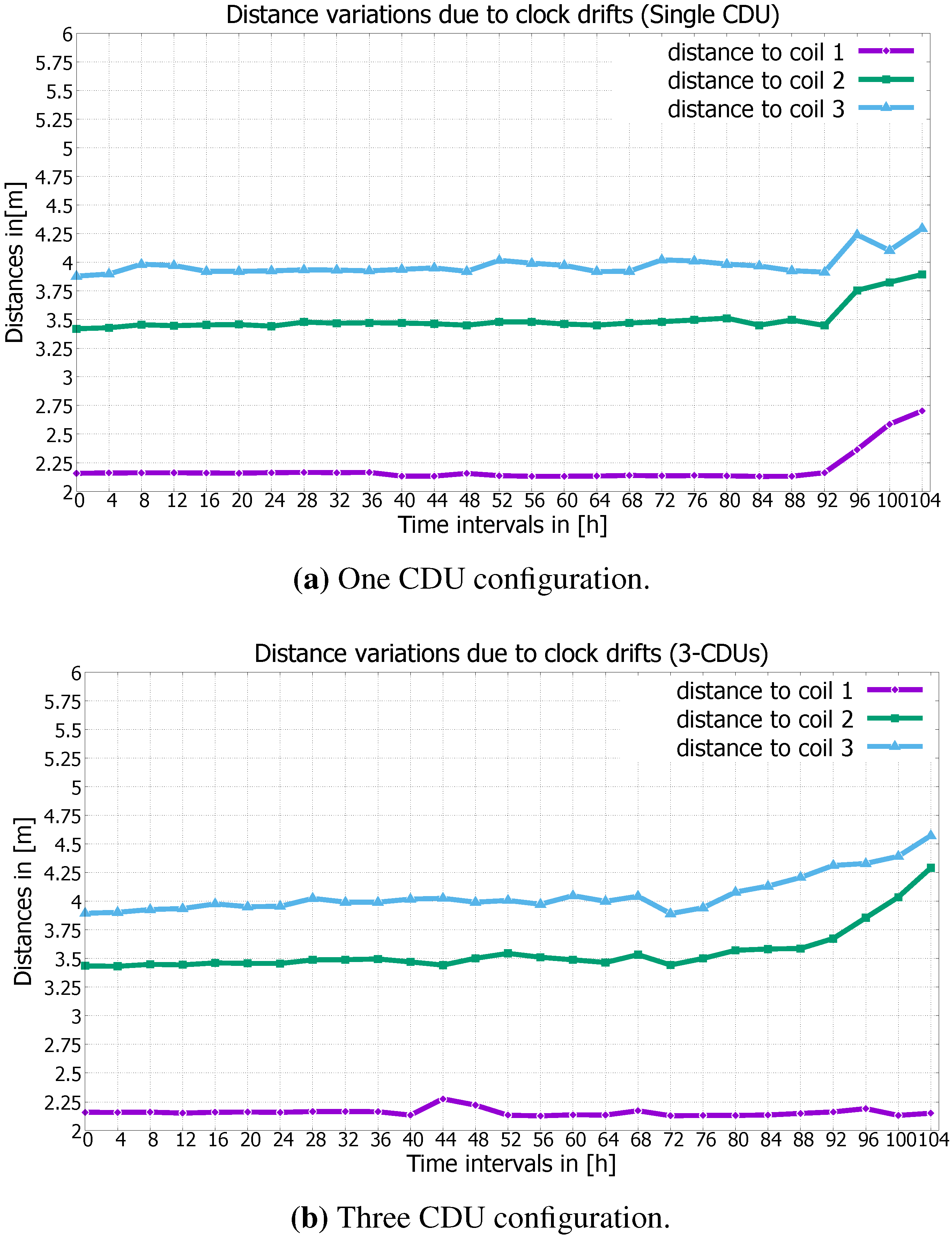
- The operating mode: In this mode, each coil’s CDU is assigned to a fixed duration slot, in which the coils are activated. Like TDMA, the time slots are cyclically organized (cf. Figure 5). Simultaneously, the MS acquires the magnetic data from the HMR2300 sensor, which can be assigned to the source coils by means of the RTC and the predefined time windows. Based on the RIOT-OS, which provides a preemptive kernel scheduler and a fast interrupt handling, the data sampling and the time division run in different threads. Despite the clock drifts of the temperature-compensated RTCs in this phase, the distance measurement is only affected if a certain time is elapsed. The maximum time threshold, which affects the distance measurement, is examined in the experimental part and is in the order of 80 h.
- The resynchronization phase: The clocks of the MS and the CDUs are reset to the same time, before the maximum time threshold elapsed.
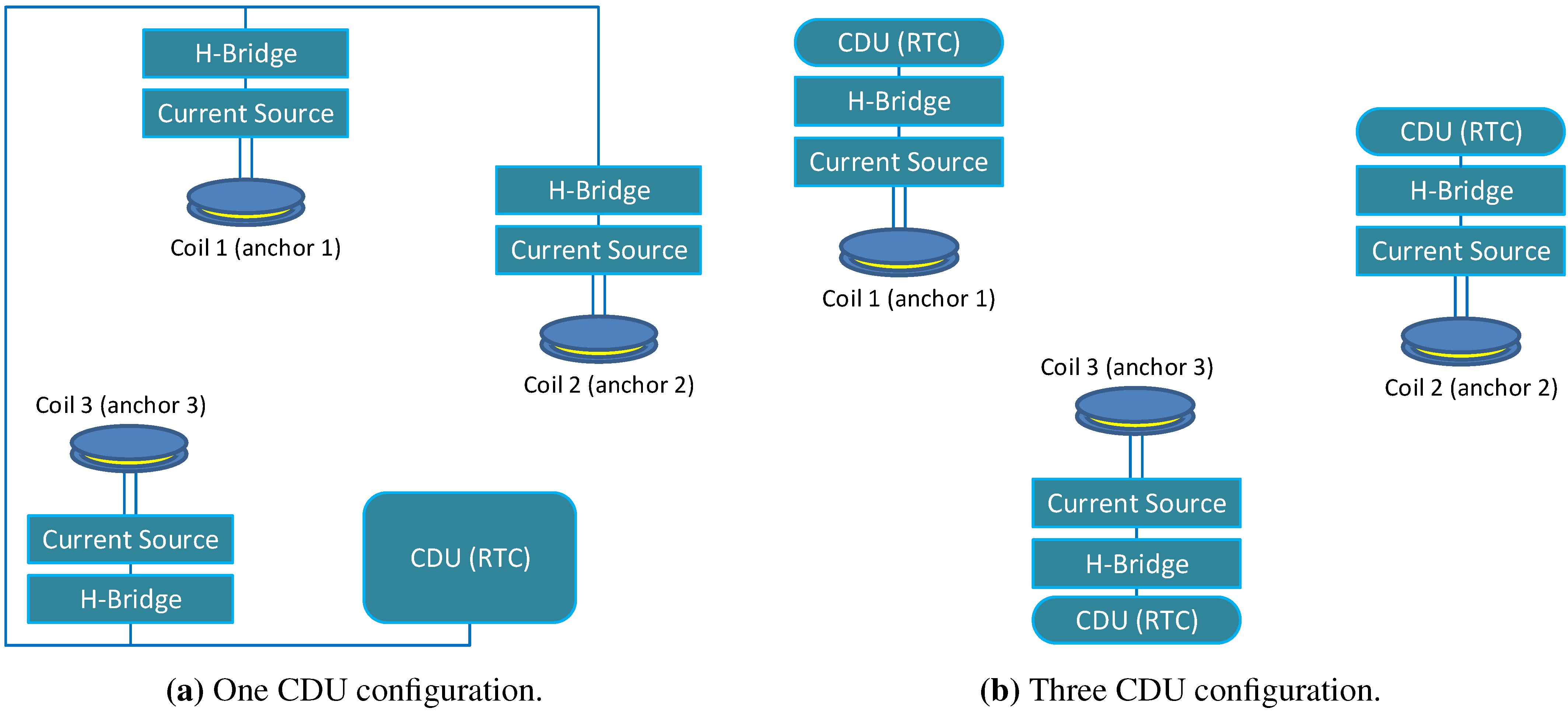
3.3.4. Coil Synchronization Schemes
- The one CDU configuration in which the coils are driven by the same CDU. This configuration is less sensitive to the clock drifts, because the drift occurs only between two clocks: the CDU and MS clocks (cf. Figure 6a).
- The N-CDU configuration in which each coil is driven by a separate CDU. This synchronization is more sensitive to the clock drifts than the one CDU configuration, since the time drift can occur between each CDU- and MS RTC and between the CDU RTCs in the neighboring time slots (cf. Figure 6b).

4. Experimental Evaluation
4.1. Clock Drift Evaluation

4.2. Synchronization Evaluation





5. Conclusions and Outlook
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zahid, F.; Rosdiadee, N.; Mahamod, I. Recent advances in wireless indoor localization techniques and system. J. Comput. Netw. Commun. 2013, 2013, 1–12. [Google Scholar]
- Ho, S.S.; Ruan, S. Differential privacy for location pattern mining. In Proceedings of the 4th ACM SIGSPATIAL International Workshop on Security and Privacy in GIS and LBS, New York, NY, USA, 1 November 2011; pp. 17–24.
- Mautz, R. Indoor Positioning Technologies. Habilitation Thesis, Department of Civil, Environmental and Geomatic Engineering, Institute of Geodesy and Photogrammetry, ETH Zurich, Zurich, Switerland, 2012. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutorials 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Norrdine, A. Präzise Positionierung und Orientierung Innerhalb von Gebäuden. Ph.D. Thesis, Geodätisches Institut, Technische University Darmstadt, Darmstadt, Germany, 2009. [Google Scholar]
- Blankenbach, J.; Norrdine, A. Position estimation using artificial generated magnetic fields. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zürich, Switzerland, 15–17 September 2010; pp. 1–5.
- Norrdine, A. An Algebraic Solution to the Multilateration Problem. In Proceedings of the 15th International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012.
- Blankenbach, J.; Norrdine, A.; Hellmers, H. A robust and precise 3D indoor positioning system for harsh environments. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–8.
- Reed, J.H. An Introduction to Ultra Wideband Communication Systems; Prentice Hall: Crawfordsville, IN, USA, 5 April 2005. [Google Scholar]
- Ultra Wideband Ranging and Communication Module. TIME DOMAIN®, 2013. Available online: http://www.timedomain.com/ (accessed on 26 November 2015).
- AeroScout Corporation. Available online: http://www.aeroscout.com/ (accessed on 26 November 2015).
- Holm, S. Ultrasound positioning based on time-of-flight and signal strength. In Proceedings of the 2012 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–6.
- Want, R.; Hopper, A.; Falcao, V.; Gibbons, J. The active badge location system. ACM TOIS 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Schneegans, S.; Vorst, P.; Zell, A. Using RFID Snapshots for mobile robot self-localization. In Proceedings of the 3rd European Conference on Mobile Robots, Freiburg, Germany, 19–21 September 2007; pp. 241–246.
- Chawathe, S.S. Low-latency indoor localization using bluetooth beacons. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009; pp. 1–7.
- Krumm, J.; Harris, S.; Meyers, B.; Brumitt, B.; Hale, M.; Shafer, S. Multi-camera multi-person tracking for easyliving. In Proceedings of the Third IEEE International Workshop on Visual Surveillance, Dublin, Ireland, 1 July 2000; pp. 3–10.
- Haverinen, J.; Kemppainen, A. A global self-localization technique utilizing local anomalies of the ambient magnetic field. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3142–3147.
- Song, S.; Hu, C.; Li, M.; Yang, W.; Meng, M.H. Real time algorithm for magnet’s localization in capsule endoscope. In Proceedings of the IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009; pp. 2030–2035.
- Pham, D.M.; Aziz, S.M. A real-time localization system for an endoscopic capsule using magnetic sensors. Sensors 2014, 14, 20910–20929. [Google Scholar] [CrossRef] [PubMed]
- Ascension Corporation. Available online: http://www.ascension-tech.com (accessed on 26 November 2015).
- Polhemus Corporation. Available online: http://www.polhemus.com (accessed on 26 November 2015).
- Sheinker, A.; Ginzburg, B.; Salomonski, N.; Frumkis, L.; Kaplan, B.Z. Localization in 3-D using beacons of low frequency magnetic field. IEEE Trans. Instrum. Meas. 2013, 62, 3194–3201. [Google Scholar] [CrossRef]
- De Angelis, G.; Pasku, V.; De Angelis, A.; Dionigi, M.; Mongiardo, M.; Moschitta, A.; Carbone, P. An Indoor AC Magnetic Positioning System. IEEE Trans. Instrum. Meas. 2015, 64, 1275–1283. [Google Scholar] [CrossRef]
- De Angelis, G.; De Angelis, A.; Dionigi, M.; Mongiardo, M.; Moschitta, A.; Carbone, P. An accurate Indoor Position-measurement system using mutually coupled resonating circuits. In Proceedings of the Instrumentation and Measurement Technology Conference, Montevideo, Uruguay, 12–15 May 2014; pp. 844–849.
- De Angelis, G.; De Angelis, A.; Pasku, V.; Moschitta, A.; Carbone, P. A hybrid outdoor/indoor positioning system for IoT applications. In Proceedings of the 2015 IEEE International Symposium on Systems Engineering, Rome, Italy, 28–30 September 2015; pp. 1–6.
- Prigge, E.A. A Positioning System with No Line-of-sight Restrictions for Cluttered Environments. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2004. [Google Scholar]
- Carrella, S.; Kuncup, I.; Lutz, K.; König, A. 3D-Localization of Low-Power Wireless Sensor Nodes Based on AMR-Sensors in Industrial and AmI Applications. In Proceedings of the Sensoren und Messsysteme 2010, Nürnberg, Germany, 18–19 May 2010.
- Yao, J.; Balaei, A.; Hassan, M.; Alam, N.; Dempster, A. Improving Cooperative Positioning for Vehicular Networks. IEEE T. Veh. Technol. 2011, 60, 2810–2823. [Google Scholar] [CrossRef]
- Zhou, Z.; Cui, J.H.; Zhou, S. Localization for Large-Scale Underwater Sensor Networks. In NETWORKING 2007. Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Akyildiz, I., Sivakumar, R., Ekici, E., Oliveira, J., McNair, J., Eds.; Lecture Notes in Computer Science; Springer Berlin Heidelberg: Berlin, Germany, 2007; Volume 4479, pp. 108–119. [Google Scholar]
- Han, G.; Xu, H.; Duong, T.; Jiang, J.; Hara, T. Localization algorithms of Wireless Sensor Networks: A survey. Telecommun. Syst. 2013, 52, 2419–2436. [Google Scholar] [CrossRef]
- Eswaran, S.; Johnson, M.; Misra, A.; Porta, T. Adaptive In-Network Processing for Bandwidth and Energy Constrained Mission-Oriented Multi-hop Wireless Networks. In Proceedings of the 5th IEEE International Conference on Distributed Computing in Sensor Systems, Marina del Rey, CA, USA, 8–10 June 2009; Springer-Verlag: Berlin, Germany, 2009; pp. 87–102. [Google Scholar]
- Baccelli, E.; Hahm, O.; Günes, M.; Wählisch, M.; Schmidt, T.C. RIOT OS: Towards an OS for the Internet of Things. In Proceedings of the 32nd IEEE INFOCOM conference, Turin, Italy, 14–19 April 2013.
- Honeywell International Inc. Smart Digital Magnetometer HMR2300. Available online: http://www.farnell.com/datasheets/46088.pdf (accessed on 25 November 2015).
- Lenk, A.; Ballas, R.G.; Werthschützky, R.; Pfeifer, G. Electromechanical Systems in Microtechnology and Mechatronics: Electrical, Mechanical and Acoustic Networks, Their Interactions and Applications (Microtechnology and MEMS); Springer: Berlin, Germany, 2010. [Google Scholar]
- Tripathi, A.; Karnik, N. Trends in multiprocessor and distributed operating systems designs. J. Supercomput. 1995, 9, 23–49. [Google Scholar] [CrossRef]
- Carver, R.H.; Tai, K.C. Modern Multithreading: Implementing, Testing, and Debugging Multithreaded Java and C++/Pthreads/Win32 Programs; Wiley-Interscience: Hoboken, NJ, USA, 2005. [Google Scholar]
- Farooq, M.O.; Kunz, T. Operating Systems for Wireless Sensor Networks: A Survey. Sensors 2011, 11, 5900–5930. [Google Scholar] [CrossRef] [PubMed]
- FreeRTOS Operating System Organisation. Available online: http://www.freertos.org (accessed on 26 November 2015).
- Levis, P.; Madden, S.; Polastre, J.; Szewczyk, R.; Whitehouse, K.; Woo, A.; Gay, D.; Hill, J.; Welsh, M.; Brewer, E.; et al. TinyOS: An Operating System for Sensor Networks. In Ambient Intelligence; Springer Verlag: Berlin, Germany, 2004. [Google Scholar]
- Dunkels, A.; Grönvall, B.; Voigt, T. Contiki—A Lightweight and Flexible Operating System for Tiny Networked Sensors. In Proceedings of Proceedings of the First IEEE Workshop on Embedded Networked Sensors (Emnets-I), Tampa, FL, USA, 16–18 November 2004.
- Bhatti, S.; Carlson, J.; Dai, H.; Deng, J.; Rose, J.; Sheth, A.; Shucker, B.; Gruenwald, C.; Torgerson, A.; Han, R. Mantis OS: An embedded multithreaded operating system for wireless micro sensor platforms. Mobile Netw. Appl. 2005, 10, 563–579. [Google Scholar] [CrossRef]
- Eswaran, A.; Rowe, A.; Rajkumar, R. Nano-RK: An energy-aware resource-centric RTOS for sensor networks. In Proceedings of the 6th IEEE International Real-Time Systems Symposium, Miami, FL, USA, 8 December 2005. [CrossRef]
- Cao, Q.; Abdelzaher, T.; Stankovic, J.; He, T. The LiteOS Operating System: Towards Unix-Like Abstractions for Wireless Sensor Networks. In Proceedings of the 7th international conference on Information processing in sensor networks, Washington, WA, USA, 22–24 April 2008; pp. 233–244.
- Will, H.; Schleiser, K.; Schiller, J. A real-time kernel for wireless sensor networks employed in rescue scenarios. In Proceedings of the IEEE 34th Conference on Local Computer Networks, Zürich, Switzerland, 20–23 October 2009; pp. 834–841.
- Simonović, M.; Saranovac, L. Power management implementation in FreeRTOS on LM3S3748. Serbian J. Electr. Eng. 2013, 10, 199–208. [Google Scholar] [CrossRef]
- Lin, J.N.; Huang, J.L. A Virtual Machine-Based Programming Environment for Rapid Sensor Application Development. In Proceedings of the 31st Annual International Computer Software and Applications Conference, Beijing, China, 24–27 July 2007; Volume 2, pp. 87–95.
- Hahm, O.; Baccelli, E.; Petersen, H.; Wählisch, M.; Schmidt, T.C. Demonstration Abstract: Simply RIOT—Teaching and Experimental Research in the Internet of Things. In Proceedings of the 13th ACM/IEEE International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014; pp. 329–330.
- Vig, J.R. Quartz Crystal Resonators and Oscillators for Frequency Control and Timing Applications—A Tutorial. Available online: http://www.ieee-uffc.org/frequency-control/learning-vig-tut.asp (accessed on 25 November 2015).
- Zhou, H.; Nicholls, C.; Kunz, T.; Schwartz, H. Frequency Accuracy & Stability Dependencies of Crystal Oscillators; Technical Report SCE-08-12; Department of Systems and Computer Engineering, Carleton University: Ottawa, ON, Canada, 2008. [Google Scholar]
- Kumar, A.; Madaan, P. Oscillators: How to Generate Precise Clock Source. Available online: http://www.edn.com/design/sensors/4406691/Oscillators–How-to-generate-a-precise-clock-source (accessed on 25 November 2015).
- Jiménez, M.; Palomera, R.; Couvertier, I. Introduction to Embedded Systems; Springer New York: New York, NY, USA, 2013. [Google Scholar]
- Bible, S. Crystal Oscillator Basics and Crystal Selection for rfPIC™ and PICmicro® Devices. Available online: http://ww1.microchip.com/downloads/en/AppNotes/00826a.pdf (accessed on 25 November 2015).
- De Alba Garcin, S.G. Crystal Oscillator Troubleshooting Guide. Available online: http://www.freescale.com/files/microcontrollers/doc/app note/AN3208.pdf (accessed on 25 November 2015).
- DALLAS Semiconductors. DS3234—Extremely Accurate SPI Bus RTC with Integrated Crystal and SRAM. Available online: https://www.maximintegrated.com/en/products/digital/real-time-clocks/DS3234.html (accessed on 25 November 2015).
- DALLAS Semiconductors. Real-Time Clock Calculator. Available online: http://www.maximintegrated.com/en/design/tools/calculators/product-design/rtc.cfm (accessed on 25 November 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kasmi, Z.; Norrdine, A.; Blankenbach, J. Towards a Decentralized Magnetic Indoor Positioning System. Sensors 2015, 15, 30319-30339. https://doi.org/10.3390/s151229799
Kasmi Z, Norrdine A, Blankenbach J. Towards a Decentralized Magnetic Indoor Positioning System. Sensors. 2015; 15(12):30319-30339. https://doi.org/10.3390/s151229799
Chicago/Turabian StyleKasmi, Zakaria, Abdelmoumen Norrdine, and Jörg Blankenbach. 2015. "Towards a Decentralized Magnetic Indoor Positioning System" Sensors 15, no. 12: 30319-30339. https://doi.org/10.3390/s151229799