7.1. Mode Confusion Rates
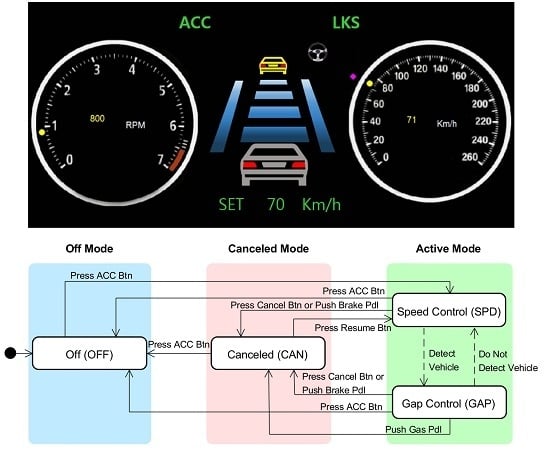
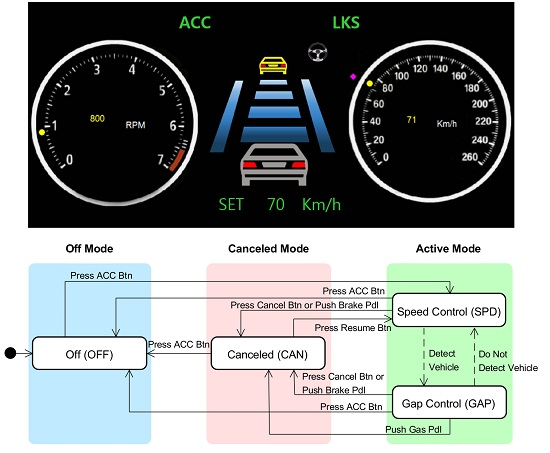
The following data were collected for each event in the experiments: the participant’s operation, the actual mode after the operation, the mode that the participant predicted without looking at the ACC interface, the reason the participant thought he/she was in that mode, and the mode that the participant recognized after looking at the ACC interface.
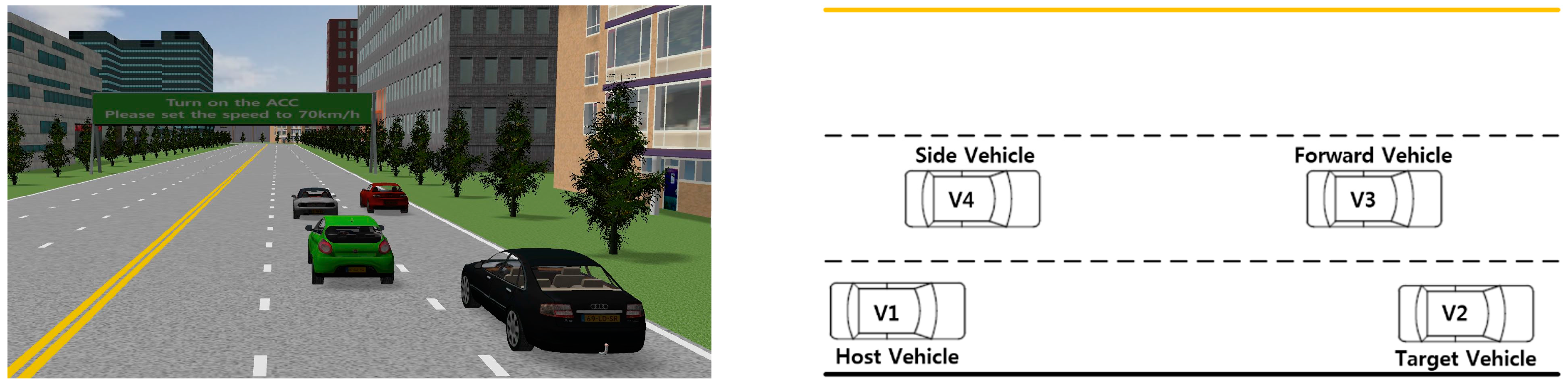
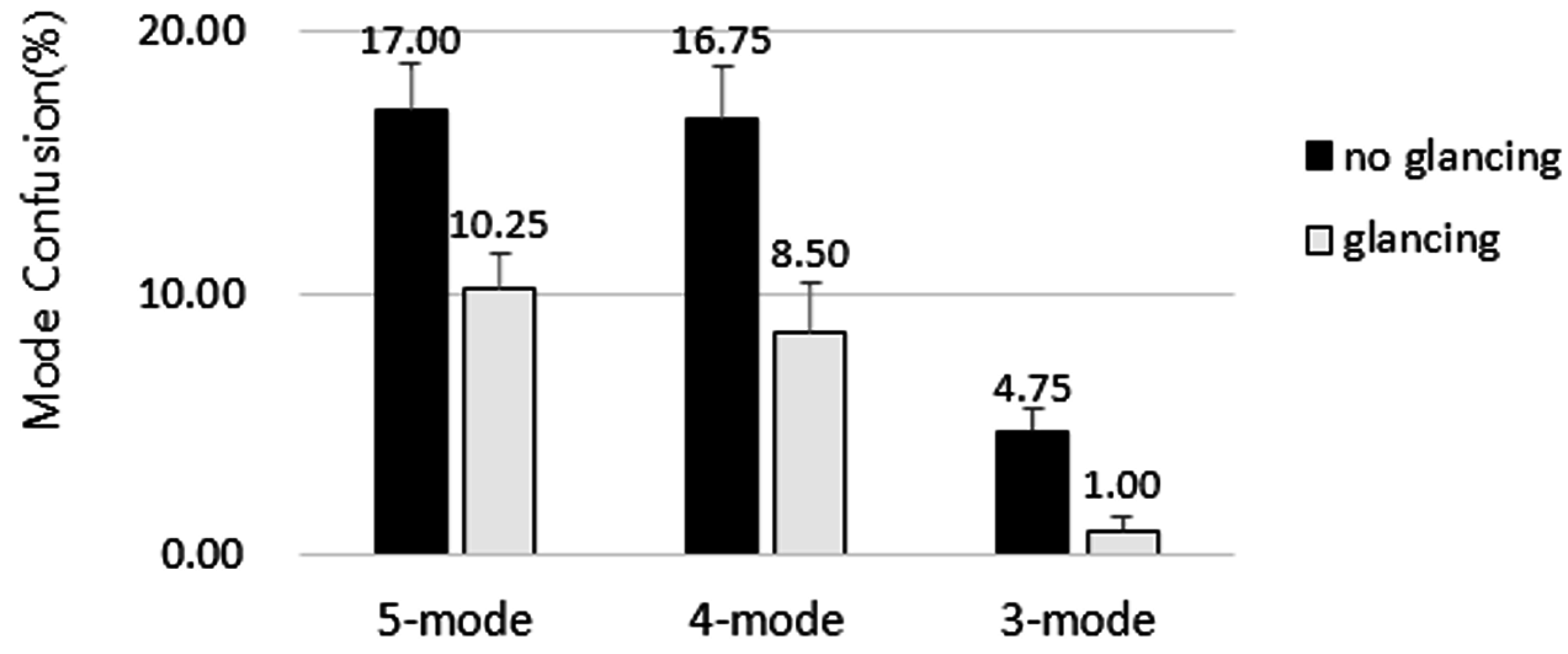
We examined the mode confusion rates for two independent variables: the type of user interface and whether or not the participant glanced at the display. We considered three levels for the type of user interface (i.e., three-, four-, and five-mode models) and two levels for glancing at the display (i.e., glancing and not glancing).
The mode confusion rates for the participants are shown in
Figure 13. Repeated measures analysis of variance (ANOVA) was conducted using Minitab 16.0 to assess the significance of the two factors. Significant main effects were detected for the interface type (
F2,78 = 45.20,
p < 0.05). The differences between the three- and four-mode interfaces (
F1,39 = 62.25,
p < 0.001) and the three- and five-mode interfaces (
F1,39 = 108.55,
p < 0.001) were significant, whereas the difference between the four- and five-mode interfaces (
F1,39 = 0.73,
p = 0.394 > 0.05) was not. In addition, glancing at the display also had a significant main effect (
F1,39 = 42.31,
p < 0.05). There was no significant interaction between interface type and glancing at the display (
F2,78 = 1.94,
p = 0.146 > 0.05).
Table 8,
Table 9,
Table 10 and
Table 11 are the confusion tables for the three ACC interfaces evaluated in this study. The confusion tables allow us to investigate how the participants recognized the changes in the mode of the ACC system during the experiments because they compare the actual modes with the modes recognized by the participants. The values in the shaded diagonal cells indicate correctly recognized states.
As
Table 8 shows, in the experiments with the five-mode interface, 83.5% and 90% of the mode changes were recognized correctly without and with glancing at the display, respectively. As
Table 9 shows, for the four-mode interface, 83.5% and 91.8% of the mode changes were recognized correctly without and with glancing, respectively. However, as
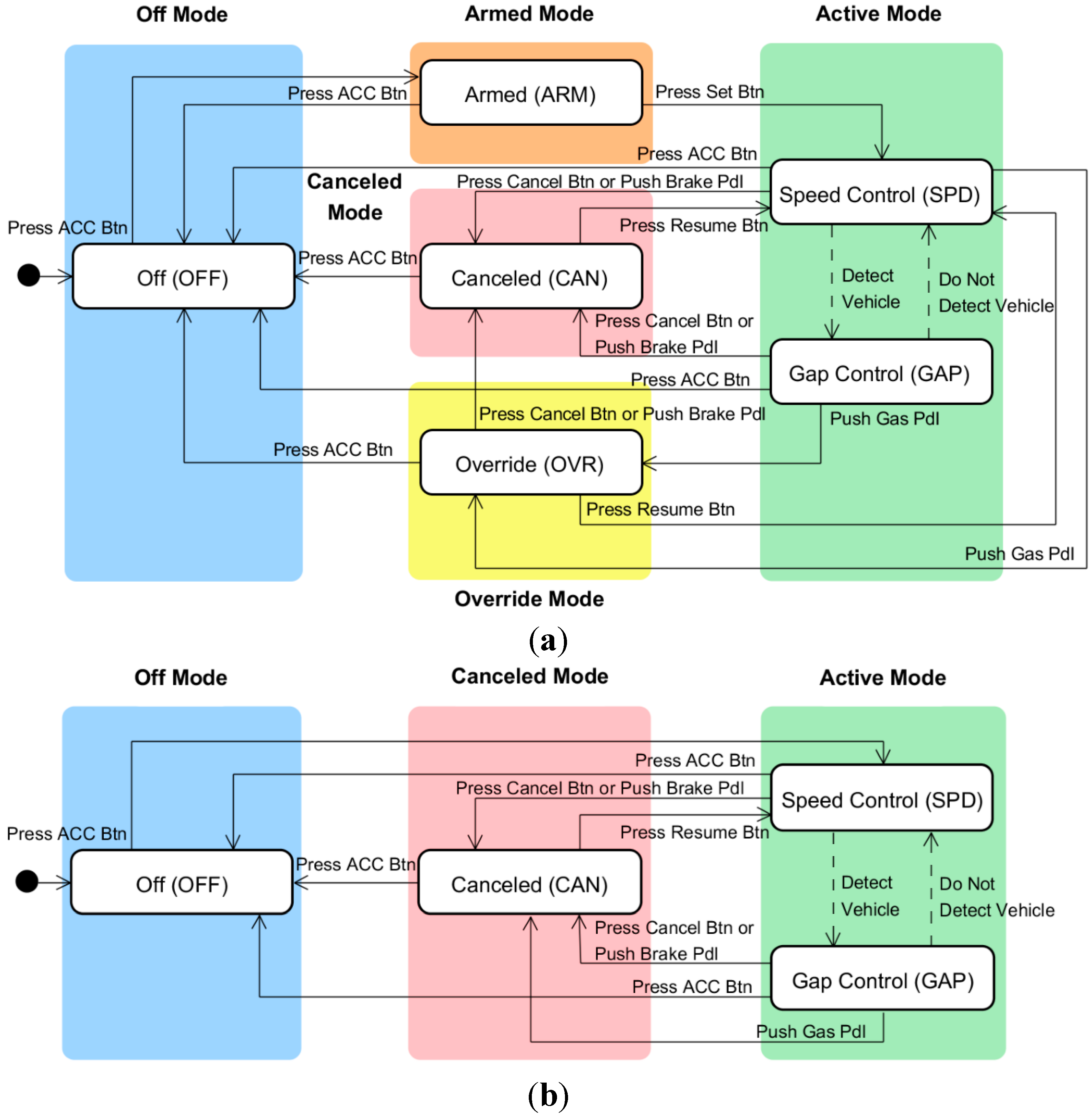
Table 10 shows, for the three-mode interface, 95.5% and 99% of the mode changes were recognized correctly without and with glancing, respectively. This is an amazing result in the design of the ACC interface. This outstanding result is attributable to the conciseness and clarity of a user interface with just three simple modes: off, canceled, and active.
Figure 13.
Mode confusion rates with the three investigated ACC interfaces for users glancing and not glancing at the display.
Figure 13.
Mode confusion rates with the three investigated ACC interfaces for users glancing and not glancing at the display.
Table 8.
Mode confusion rates before and after glancing at the five-mode interface in the experiments.
Table 8.
Mode confusion rates before and after glancing at the five-mode interface in the experiments.
| | | Modes Recognized by Drivers | | | |
|---|
| Actual Modes | Mode | Off | Armed | Canceled | Override | Active | Mode Confusion | Total |
| Before | After | Before | After | Before | After | Before | After | Before | After | Before | after |
| Off | 83 (100%) | 84 (100%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 167 |
| Armed | 0 (0%) | 0 (0%) | 20 (47%) | 25 (58%) | 5 (11%) | 11 (26%) | 3 (7%) | 3 (7%) | 15 (35%) | 4 (9%) | 23 (53%) | 18 (42%) | 86 |
| Canceled | 0 (0%) | 1 (1%) | 19 (13%) | 9 (6%) | 125 (84%) | 137 (93%) | 1 (1%) | 0 (0%) | 3 (2%) | 0 (0%) | 23 (16%) | 10 (7%) | 295 |
| Override | 0 (0%) | 0 (0%) | 6 (17%) | 6 (17%) | 1 (3%) | 2 (6%) | 26 (74%) | 27 (77%) | 2 (6%) | 0 (0%) | 9 (26%) | 8 (23%) | 70 |
| | Active | 0 (0%) | 0 (0%) | 2 (2%) | 0 (0%) | 6 (7%) | 3 (3%) | 3 (3%) | 1 (1%) | 80 (88%) | 87 (96%) | 11 (12%) | 4 (4%) | 182 |
| | Total | 83 | 85 | 47 | 40 | 137 | 153 | 33 | 31 | 100 | 91 | 66 | 40 | 800 |
Table 9.
Mode confusion rates before and after glancing at the four-mode interface in the experiments.
Table 9.
Mode confusion rates before and after glancing at the four-mode interface in the experiments.
| | | Modes Recognized by Drivers | | |
|---|
| Actual Modes | Mode | Off | Armed | Canceled | Active | Mode Confusion | Total |
| Before | After | Before | After | Before | After | Before | After | Before | after |
| Off | 79 (99%) | 80 (100%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) | 0 (0%) | 1 (1%) | 0 (0%) | 160 |
| Armed | 0 (0%) | 0 (0%) | 29 (66%) | 33 (75%) | 6 (14%) | 10 (23%) | 9 (20%) | 1 (2%) | 15 (34%) | 11 (25%) | 88 |
| Canceled | 1 (1%) | 0 (0%) | 20 (15%) | 14 (11%) | 103 (82%) | 114 (89%) | 2 (2%) | 0 (0%) | 23 (18%) | 14 (11%) | 254 |
| Active | 0 (0%) | 0 (0%) | 13 (9%) | 4 (3%) | 14 (9%) | 4 (3%) | 123 (82%) | 140 (94%) | 27 (18%) | 8 (6%) | 298 |
| | Total | 80 | 80 | 62 | 51 | 123 | 128 | 135 | 141 | 66 | 33 | 800 |
Table 10.
Mode confusion rates before and after glancing at the three-mode interface in the experiments.
Table 10.
Mode confusion rates before and after glancing at the three-mode interface in the experiments.
| | | Modes Recognized by Drivers | | |
|---|
| Actual Modes | Mode | Off | Canceled | Active | Mode Confusion | Total |
| Before | After | Before | After | Before | After | Before | after |
| Off | 81 (99%) | 82 (100%) | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) | 0 (0%) | 164 |
| Canceled | 0 (0%) | 0 (0%) | 155 (92%) | 164 (98%) | 13 (8%) | 4 (2%) | 13 (8%) | 4 (2%) | 336 |
| Active | 0 (0%) | 0 (0%) | 4 (3%) | 0 (0%) | 146 (97%) | 150 (100%) | 4 (3%) | 0 (0%) | 300 |
| | Total | 81 | 82 | 160 | 164 | 159 | 154 | 18 | 4 | 800 |
Table 11.
Questions and responses after experiments with the three-, four-, and five-mode ACC interfaces.
Table 11.
Questions and responses after experiments with the three-, four-, and five-mode ACC interfaces.
| Question | Response | No. of Participants |
|---|
| Five Mode | Four Mode | Three Mode |
|---|
| Did you have mode confusion during the experiment? | Yes | 31 | 19 | 2 |
| Which modes made you confused? | Armed-Canceled | 18 | 11 | NA |
| Armed-Active | 6 | 5 | NA |
| Armed-Override | 5 | NA | NA |
| Armed-Canceled-Override | 2 | NA | NA |
| Canceled-Active | 2 | 7 | 2 |
| Canceled-Override-Off | 5 | NA | NA |
| Canceled-Override | 2 | NA | NA |
| Why were you confused? | Confused in the mode definitions | 25 | 11 | 2 |
| Confused in the button meanings | 5 | 5 | NA |
| Had no idea about how to do after pushing the pedals | 12 | 8 | NA |
| What did you do when you had the mode confusion? | Looking at the interface display | 9 | 7 | 1 |
| Turning off and on the ACC | 12 | 5 | 1 |
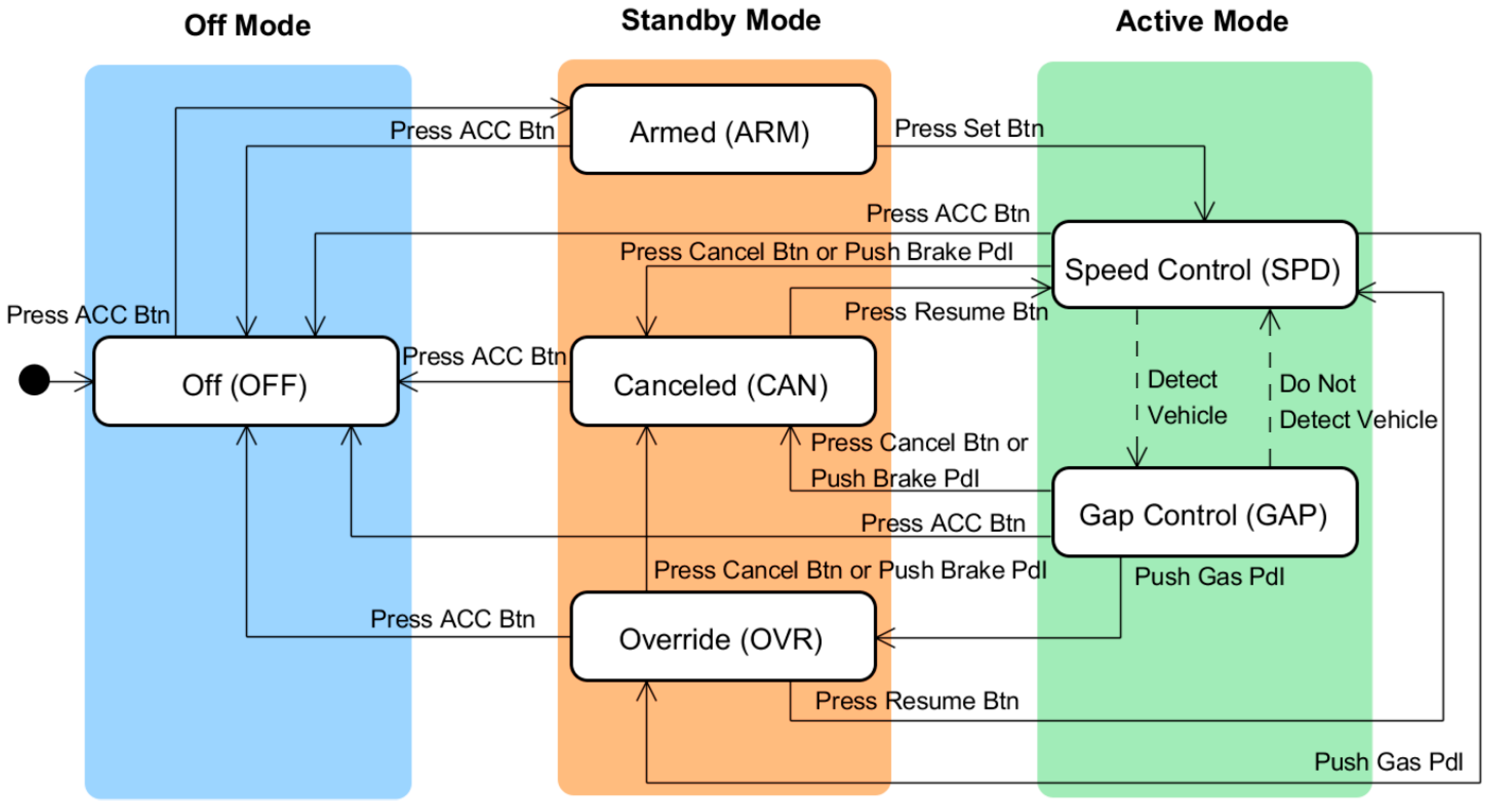
With the four- and five-mode interfaces, the highest mode confusion rate occurred in the armed mode, regardless of whether the display was viewed. Some participants believed that the state changed immediately into the active mode and that the speed was set when they pressed the ACC button. Other participants confused armed with canceled because they were not actually aware of the difference between the two states. However, we expected that looking at the display of the ACC interface might reduce the incidence of mode confusion. The experimental results show that the cases in which the armed mode was confused with the active mode decreased from 35% to 9% and from 20% to 2% in the five- and four-mode interfaces, respectively, after the participants looked at the display. However, the cases in which the armed mode was confused with the canceled mode increased from 11% to 26% and from 14% to 23% in the five- and four-mode interfaces, respectively, after the participants looked at the display. This confusion is believed to occur because of the similarity of the orange and red text colors that indicate the armed and canceled modes, respectively, and the fact that the participants did not understand that “Set __ km/h” was related to the operation mode. The set speed was not present in the armed mode, but it was present in the canceled mode. In addition, the confused participants did not sufficiently understand the difference between the armed and canceled modes. Therefore, if possible, the armed and canceled modes should be merged to prevent mode confusion. The experimental results for the three-mode interface support this claim.
The confusion rates in the canceled mode were 16%, 18%, and 8% with the five-, four-, and three-mode interfaces, respectively, without looking at the display. The participants who confused canceled with armed misunderstood that the ACC’s set speed would be reset when they pressed the brake. A single participant confused canceled with off and answered that pressing the brake pedal turned off the ACC. The 18 participants who confused canceled with active answered that they could not know whether the ACC was active or not without looking at the interface. After looking at the interface display, mode confusion was completely removed in the active mode in the five- and four-mode interfaces. However, in the three-mode interface, mode confusion still existed. Four confused participants answered that the active mode included the canceled mode.
The confusion rates of the override mode were 26% and 23% in the five-mode interface before and after looking at the interface display, respectively. Mode confusion was not reduced because the participants who answered incorrectly did not properly understand the definitions of the modes.
The confusion rates of the active mode were 12%, 18%, and 3% for the five-, four-, and three-mode interfaces, respectively, without looking at the interface display. Instances of mode confusion occurred mostly after Event 6, in which the mode changed from canceled to active when the participant pressed the resume button. The active mode was confused with various modes. Some participants who confused active with armed did not press the resume button but rather the set button. Other participants who confused active with canceled did not remember that they had to press the resume button after pressing the brake. Other participants who confused active with override thought that the override mode simply accelerated the vehicle regardless of whether the gas pedal was pressed or not. One of the reasons for this misunderstanding was the existence of too many modes in the five-mode interface. After looking at the interface display, mode confusion was completely or almost completely removed in the active mode.
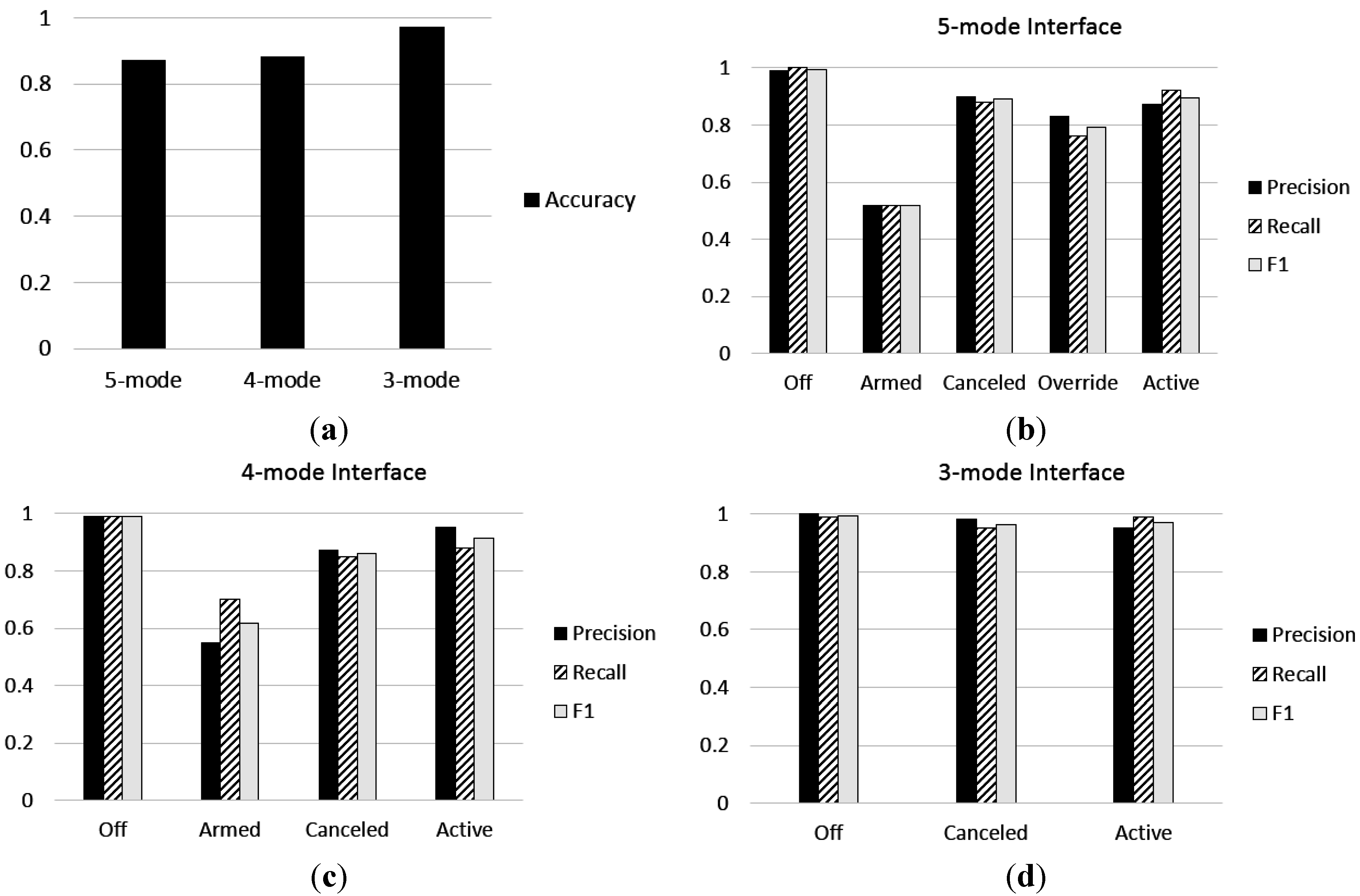
Figure 14.
Performance evaluation results for the three types of interfaces: (a) accuracy; (b) precision, recall, and F1 measure of the five-mode interface; (c) precision, recall, and F1 measure of the four-mode interface; and (d) precision, recall, and F1 measure of the three-mode interface.
Figure 14.
Performance evaluation results for the three types of interfaces: (a) accuracy; (b) precision, recall, and F1 measure of the five-mode interface; (c) precision, recall, and F1 measure of the four-mode interface; and (d) precision, recall, and F1 measure of the three-mode interface.
Typical performance evaluation metrics, such as accuracy, precision, recall, and the F1 measure [
25], were evaluated and are summarized in
Figure 14. The accuracies of the five- and four-mode interfaces are 0.87 and 0.88, respectively, whereas the accuracy of the three-mode interface is 0.97. As shown in
Figure 14, the three-mode interface shows significantly better performance than the other interfaces. In the three-mode interface, incorrect mode recognition decreased dramatically because three different modes that indicate the standby status of the ACC system (
i.e., armed, canceled, and override modes) were merged into one mode (
i.e., canceled mode).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












