Patrol Detection for Replica Attacks on Wireless Sensor Networks

Abstract
: Replica attack is a critical concern in the security of wireless sensor networks. We employ mobile nodes as patrollers to detect replicas distributed in different zones in a network, in which a basic patrol detection protocol and two detection algorithms for stationary and mobile modes are presented. Then we perform security analysis to discuss the defense strategies against the possible attacks on the proposed detection protocol. Moreover, we show the advantages of the proposed protocol by discussing and comparing the communication cost and detection probability with some existing methods.1. Introduction
Wireless sensor networks are usually deployed in hostile environments for their unattended nature which makes nodes in the network dangerous to be captured by an adversary. The adversary can compromise the captured nodes and obtain all the secrets of the nodes, replicate the compromised nodes to get many replicas with the same node identity. Then she can launch an insidious attack with these “legitimate” nodes.
The compromised node and its replicas can join the network and act as any benign nodes. This is very harmful to the network. As discussed in references [1–3], many detection methods work well to detect the compromised node under the assumption that the benign nodes are in majority in global and local areas, but they didn’t focus on replica attacks, in which the adversary has many malicious replicas, and the assumption of “benign nodes in majority” has thus failed, so we should exclude the replicas before using these compromised node detection methods.
2. Related Work and Network Assumptions
2.1. Related Work
After Parno, Perrig et al. [4] pointed out the concept of replica attack, some detection methods were proposed, such as centralized detection, local detection, and distributed detection. In general, centralized methods will bring out the problem of single point failure, and many communications are converged in the neighborhood of the central node. Local detection doesn’t deal with the replicas deployed in different zones and the communication is too high in the distributed detection. Parno, Perrig et al. present randomized multicast and line-selected multicast which use some witness nodes to replace the whole network detection and ensure the detection probability by the birthday paradox theory. Ho et al. [5] further decrease the communication cost by using group deployment knowledge.
Ho et al. [6] also present a SPRT method for replica detection in mobile sensor networks, in which all sensors are mobile. Pietro, Oligeri et al. [7] consider another type of mobile sensor network in which mobile sinks visit stationary sensors and collect the data once in each round. In this letter, we use mobile nodes acting as the mobile sink described in [7] to patrol the stationary sensors and detect the replicas. This likes the policeman in the real society scenario where he patrols the streets to find the bad person which is more efficient than all the citizen checking and report their neighbors.
2.2. Network Assumptions
In our network, there are two types of nodes: mobile nodes serving as patrollers and sensor nodes, which we also call ordinary or stationary nodes. Mobile sensor devices are more powerful than stationary ones in terms of battery power, storage and communication band. The mobile nodes are also able to obtain their location information. The sensors organize a two-dimension stationary sensor network where the locations of sensors do not change after deployment.
We assume that all direct communication links between nodes are bidirectional. Every node has a unique ID in the network which is assigned by the network operator before deployment. An identity-based public key scheme and time synchronization system are employed for the nodes and network as the most common attack detection scheme [4,5]. We also assume there is a maximum speed of the mobile nodes in this system as Ho et al. [5]. This maximum speed assumption can be used to identify the replicas of mobile nodes if they move faster than the speed limitation.
The adversary has the ability to compromise a limited number of nodes, fully control the compromised node, and produce many replicas of compromised nodes to enlarge the attack ability. We assume that the adversary can’t capture enough nodes to have a significant influence on the network, but may fully control the whole network by replicating many replicas. We also assume that the adversary can’t create new IDs. Thus the goal of this paper is finding and revoking all the replicas with the same ID to ensure the security of the network.
3. Patrol-based Replica Detection Protocol
We will detect the replicas by the assumptions presented in Section 2. If two or more sensors in different locations have a same ID, then all the nodes with the ID will be regarded as compromised node or its replicas. Also, if a mobile node moves with a speed higher than the denoted maximum speed, it will be regarded as a replica attack.
3.1. Basic Patrol Protocol
The mobile nodes patrol the networks and send their claim messages to sensors. The sensors should get their secret material from the patroller at the proceeding round, or else, it will be excluded from the network in next round.
In the first round, the networks should be initialized. We assume that there are no any attacks at the initial round as in most of the literature [4]. Each node will be patrolled by at least two mobile nodes. After receiving the location messages, the stationary node N takes the mobile nodes who patrolled him as the anchor nodes, then using some localization algorithms, such as presented in literature[8], to obtain their location (xN, yN), and save (xN, yN) as his own location LN.
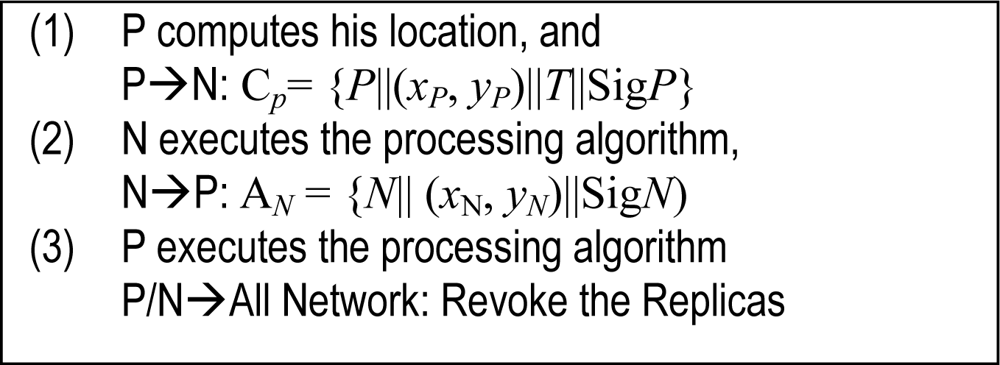
After the initial round, each round is divided into some intervals. In each interval, a patroller will move to a zone to broadcast its claim message. Then the stationary nodes will communicate with a mobile patroller by using the patrol detection protocol as shown in Figure 1 in every round.
As shown in Figure 1, when a mobile patrol node P moves to a new zone, it first discovers its location (xP, yP) and then broadcasts its patrol claim CP = {P‖(xP, yP)‖T‖SigP}, where T is the claim sent time, SigP is the signature generated by node P’s private key KS(P). In fact, we usually have :
Upon receiving CP, every neighboring node N checks whether T is valid or not. If:
After collecting the answer message AN, P will check the location of node N, and if the distance is larger than the signal range, it ignores the wrong message. Otherwise, P checks the ID of the answer message by using the security assumption “A benign ID only has one location”. Then it saves the answer from the benign node in a white list, saves the replica node’s ID in a blacklist, and revokes the replicas’ ID by refusing to distribute secrete material and broadcasting its two answer messages to other mobiles nodes. Then P will move to other location to send his patrol claim in another interval. After a round, it collects all the saved information of the white and blacklists to the user when collecting the sensing data.
3.2. Replicas Detection
In our network model, there are two types of nodes: patrol nodes and ordinary sensors. So there are two kinds of replica detection algorithms.
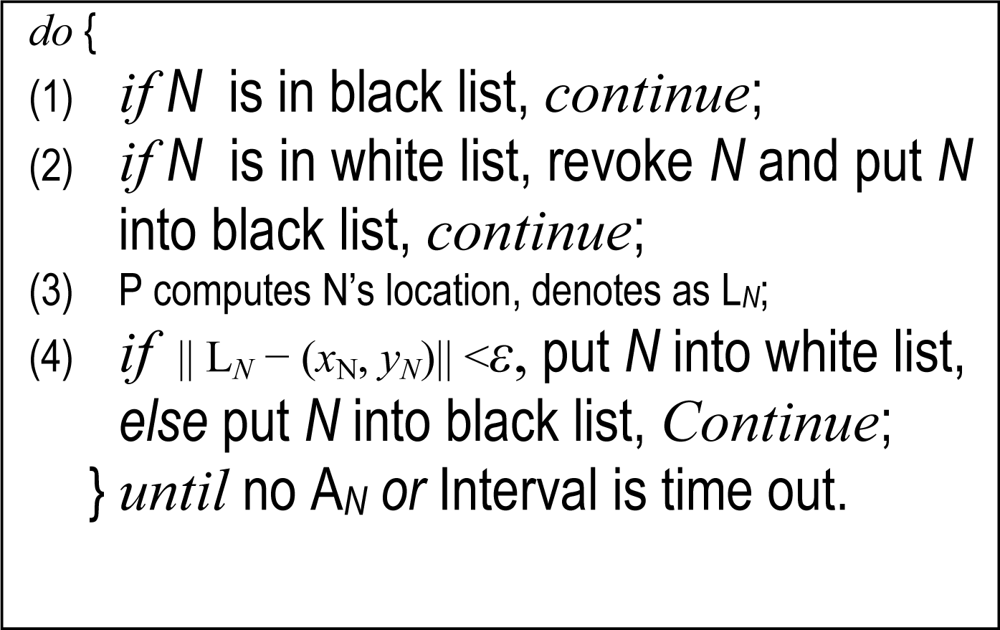
Replica Node Detection: In our network assumption, each sensor node has a unique ID and is static after it is deployed. Under the security assumption “A benign ID only has one location”, we detect replicas by using patrol nodes to seek for the ID in more than one location. If the replicas are deployed in a zone where a patrol node collects their answer message in a patrol interval, then the patroller can revoke them immediately after he receives the second answer and the distance between the two location exceeds ɛ. Else if the replicas’ answers are collected by different patrol nodes, then they will be found by the base station or by exchange messages of patrollers after a round. After receiving AN, P executes the following Node Replica Detection Algorithm.
Replica Patroller Detection: If the adversary compromises and replicates the patrol node, then the detection assumption for the static sensor nodes will not work, because the benign mobile patrol node is treated as replica due to the continuous change in locations.
Fortunately, mobility provides us with some clues to help resolve the mobile replica detection problem. Firstly, a benign mobile patroller will wait for the answer message after he reaches a new position and sends his claim in time T., so there is a static period Interval after the patrol broadcasts his claim. Accordingly, if the patroller node moves and changes its position in time (T, T + Interval), then it is highly likely that at least two nodes with the same identity are present in the networks. Further, the mobile patroller should never move faster than the system-configured maximum speed Vmax. As a result, we use the fact that an uncompromised patroller should never move at speeds in excess of Vmax and satisfies formula (1) as following:
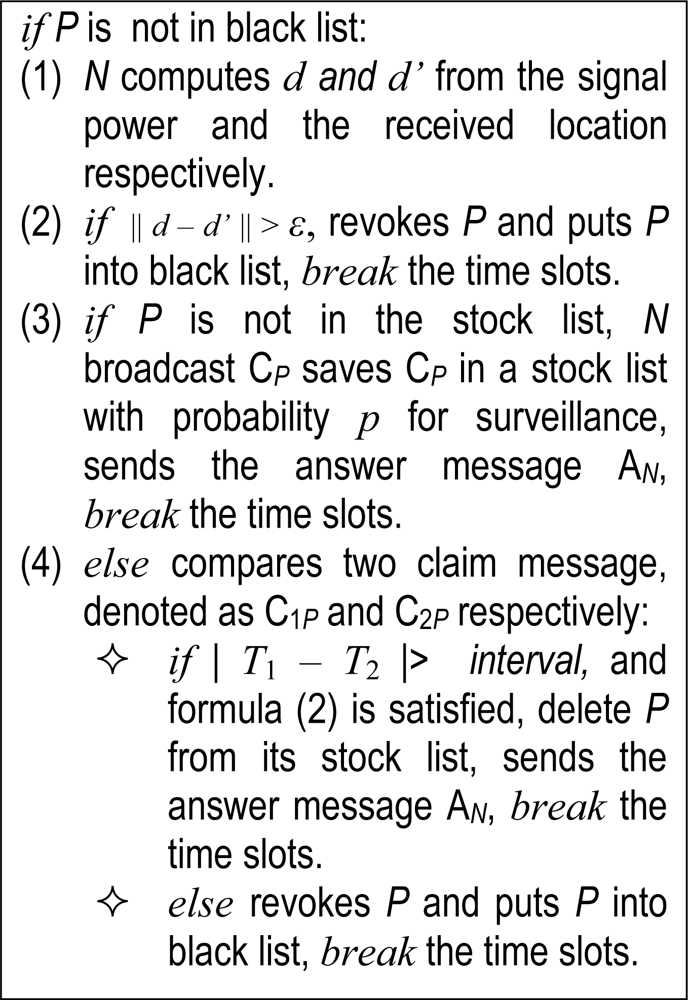
After receiving the patrol claim CP from P, the ordinary node executes following operations shown as the pseudo-code to detect patrol replicas.
In the algorithm shown in Figure 3, the sensors broadcast CP with probability p as surveillance. This measure provides evidence for mobile replica detection, and the probability p decreases network traffic.
4. Security and Performance
4.1. Security Analysis
The proposed schemes should perform replicas dtection in a secure manner. Let us discuss attacks that might be launched by the attacker and the defense strategies against such attacks in our protocol. Firstly, a malicious sensor may attempt to forge a claim for defaming the patroller. However, there is a signature of P in CP. The malicious node cannot get a fresh P’s signature in a forge time T, because the time T is encrypted by the private key of P in SigP defined in formula (1). The malicious node cannot forge a location too. So the SigP present a binding of time and location, which provides the integrity and freshness of the claim message.
Similarly, a malicious patroller will try to revoke good nodes as a replica. If P revoke a node N, it is required to forward N’s answer message AN = {N|| (xN, yN) ||T|| SigN) from two different place in time T. It is difficult to forge N’s fresh signature in position (xN, yN).
Moreover, the adversary cannot gain much benefit from collusion of malicious nodes and patroller. For example, the adversary will deploy many replicas in the zone of a malicious patroller. But the malicious patroller cannot give a new ID to the replica nodes and the zone will be patrolled by another patrol node in next round. Then the benefit is that the replica nodes will not be revoked in a round. But the high density of the replicas will help to be found in next round, and it is harmful to hide the malicious patroller. If we require the sensor nodes to show their admission by binding the patroller’s Signature and its own position with the transmitting message in the run time, then its execution will be restricted further.
Finally, if the multiple replicas of a single node form a physically close group and they can answer all claims with the same location, then it will not be detected by the patrol protocol. But this group strategy substantially limits the region affected by the replicas and thus the attacker will not gain much benefit from using the replicas in the limited region. For example, in a false data injection attack, it would be easy to ensure that only one of the replicas’ data values at a time is accepted by the data aggregators. Similarly, in network application protocols, only one of the replicas’ input values at a time would be taken by their neighbors. In this sense, multiple nodes with the same ID would not have more influence in a region than a single node.
4.2. Performance Analysis
We deploy m mobile nodes and n sensor nodes in a field, and we divide the deployment field into k claim zones. Table.1 gives the symbols and their notations.
Now we discuss the performance of our detection protocol with these parameters. In our methods, we add the mobile nodes to an existed static sensor network. If the network has a base station, then we use the convenience from the base station. If there is no base station, then the patrols should contact to exchange the detected information. At first, we consider the scenario that the network has a base station. As the trusted centre, base station can arrange the mobile nodes to patrol the nodes. If there are intervals in a round, then we can set each zone to be patrol at least once at a round. That is to say, the nodes of m zones receive and answer message at each interval. The whole communications of the network are . As introduced in reference [4], the communication of centralized detection is , our method is much better than that. In fact, we have hierarchy network architecture in this case. There are three layers: a base station, m mobile nodes serve as sink, and n sensor nodes. Now we consider the communication cost of local detection of hierarchy network with m sink nodes. The detection costs within a zone are .
The average cost of a sink sending the message to the base station are
Then the whole cost are
It is also higher than our method. Align better all these equations.
Further, we consider the scenario without a base station in the network. If we set ([k/m–1]+1) intervals in a round as the case with a base station in the network, then we can’t detect the replicas among different zones though all the nodes are patrolled at a round. The naïve thinking is that each pair of mobile nodes communicates and exchanges all the answer messages at each round. The communications are
The cost is too high with the consideration of the exchanged messages.
In fact, it is difficult that each zone will be visited once by a mobile node in this case. The mobile nodes should cost more communication to set the global arrangements of the patrol process. In the following, we set the mobile nodes without global awareness move as the random zone model as the random waypoint model defined by [7], in which each patrol randomly choose a destination zone at each interval. We assume that a round has x intervals, then the whole communications are (x*n*m/k).
Now we discuss the detection probabilities of a node with r replicas: N1, N2, … Nr. Each replica has probability to be patrolled at an interval, and it has x *m/k chances to be visit by mobile nodes. Following the standard derivation of the birthday paradox, the probability P1 that x *m/k mobile nodes patrol the zone located by N1 does not patrol the N2’s zone is given by:
Similarly, the probability Pi that i·(m·x/k) mobile nodes that patrol the zones located by one replica of { N1, N2, …, Ni} does not patrol the Ni+1’s zone is given by:
Thus, the probability Pnone that no two zones with any nodes in {N1, N2, … Nr} are patrolled by a mobile nodes is:
So the detection probability is:
If we have m = k and x = k1/2, Pdetection is greater than 63% in formula (3) when r = 2. And Pdetection will be greater than 95% if r = 3. In this case, the communication cost are (n*k1/2), which is O(n) if k is set independent of n.
We show the communication cost of existing work in Table 2. Contrasted with the context, our method is much less than O(n2) of Randomized Multicast in communication cost with the same detection performance, and shows good detection performance over Line-Selected Multicast method with O(n*k1/2) communication cost over its O(n*n1/2), in which k is much smaller than n.
5. Conclusions
We use mobile nodes as patrollers to detect replica nodes in wireless sensor networks, and present a patrol detection protocol and related algorithms. Contrasted with existing work, our detection protocol gets best detection performance with similar communication cost and the lowest communication cost with similar detection rates. That is to say, the use of mobile nodes can save the energy of static nodes and prolong the lifetime of the whole network.
Acknowledgments
We would like to thank Alex KOT of Nanyang Technological University and the anonymous reviewers for there valuable suggestions. The author Liang-min Wang is supported Special Funding Scheme of China Postdoctoral Science Foundation under No.200801357, QingLan Project of Jiangsu Province and Talents Foundation of Jiangsu University under No.07JDG080. The work of this paper is supported by Natural Science Foundation of China under No.60703115, Social Science Foundation of China under No. 09CTJ006, and Postdoctoral Science Foundation of Jiangsu Province under No.0702003B.
References
- Zahariadis, T; Leligou, HC; Trakadas, P; Voliotis, S. Trust management in wireless sensor networks. Eur. Trans. Telecommun 2010, 21, 1–10. [Google Scholar]
- Zhang, Q; Yu, T; Ning, P. A framework for identifying compromised nodes in wireless sensor networks. ACM Trans. Inform. Syst 2008, 11, 1–37. [Google Scholar]
- Shaikh, RA; Jameel, H; Auriol, BJ; Lee, H; Lee, S; Song, YJ. Intrusion-aware alert validation algorithm for cooperative distributed intrusion detection schemes of wireless sensor networks. Sensors 2009, 9, 5989–6007. [Google Scholar]
- Parno, B; Perrig, A; Gligor, VD. Distributed detection of node replication attacks in sensor networks. Proceedings of IEEE S&P, Oakland, CA, USA, 8–11 May 2005; pp. 49–63.
- Ho, JW; Wright, M; Das, SK. Fast detection of replica node attacks in mobile sensor networks using sequential analysis. Proceedings of IEEE INFOCOM, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 1773–1781.
- Ho, JW; Liu, D; Wright, M; Das, SK. Distributed detection of replica node attacks with group deployment knowledge in wireless sensor networks. Ad Hoc Network 2009, 7, 1476–1488. [Google Scholar]
- Pietro, RD; Oligeri, G; Soriente, C; Tsudik, G. Intrusion resilience in mobile unattended WSNs. Proceedings of INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1–9.
- Mariano, G; Zahariadis, T; Álvarez, F; Leligou, HC; Adrián, PH; Karkazis, P; Francisco, JC. Secure geographic routing in ad-hoc and wireless sensor networks. URASIP J Wirel Comm 2010, 975607, 1–12. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Symbols | Notation |
|---|---|
| Interval | Time period for patrolling a zone. |
| Round | Time period for the user to collect data |
| k | Total number of zones |
| n | Total number of sensors |
| m | Number of mobile nodes |
| r | Replicas number of a compromised node |
| Detection Methods | Communications | |
|---|---|---|
| With Base station | Centralized Detection | O(n*n1/2) |
| Hierarchy Detection | O(n*k) | |
| SPRT for mobile nodes [5] | O(n*n1/2) | |
| Our method | O(n) | |
| Without Base Station | Randomized Multicast [4] | O(n2) |
| Line-Selected Multicast [4] | O(n*n1/2) | |
| Group deployment [6] | Determined by Deployment Accuracy | |
| Our method | O(n*k1/2) | |
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wang, L.-M.; Shi, Y. Patrol Detection for Replica Attacks on Wireless Sensor Networks. Sensors 2011, 11, 2496-2504. https://doi.org/10.3390/s110302496
Wang L-M, Shi Y. Patrol Detection for Replica Attacks on Wireless Sensor Networks. Sensors. 2011; 11(3):2496-2504. https://doi.org/10.3390/s110302496
Chicago/Turabian StyleWang, Liang-Min, and Yang Shi. 2011. "Patrol Detection for Replica Attacks on Wireless Sensor Networks" Sensors 11, no. 3: 2496-2504. https://doi.org/10.3390/s110302496