

Local Differential Privacy Based Membership-Privacy-Preserving Federated Learning for Deep-Learning-Driven Remote Sensing

The School of Cyber Engineering, Xidian University, Xi’an 710071, China
*
Author to whom correspondence should be addressed.
Remote Sens. 2023, 15(20), 5050; https://doi.org/10.3390/rs15205050
Submission received: 11 August 2023
/
Revised: 22 September 2023
/
Accepted: 18 October 2023
/
Published: 20 October 2023
(This article belongs to the Topic AI and Data-Driven Advancements in Industry 4.0)
Abstract
:With the development of deep learning, image recognition based on deep learning is now widely used in remote sensing. As we know, the effectiveness of deep learning models significantly benefits from the size and quality of the dataset. However, remote sensing data are often distributed in different parts. They cannot be shared directly for privacy and security reasons, and this has motivated some scholars to apply federated learning (FL) to remote sensing. However, research has found that federated learning is usually vulnerable to white-box membership inference attacks (MIAs), which aim to infer whether a piece of data was participating in model training. In remote sensing, the MIA can lead to the disclosure of sensitive information about the model trainers, such as their location and type, as well as time information about the remote sensing equipment. To solve this issue, we consider embedding local differential privacy (LDP) into FL and propose LDP-Fed. LDP-Fed performs local differential privacy perturbation after properly pruning the uploaded parameters, preventing the central server from obtaining the original local models from the participants. To achieve a trade-off between privacy and model performance, LDP-Fed adds different noise levels to the parameters for various layers of the local models. This paper conducted comprehensive experiments to evaluate the framework’s effectiveness on two remote sensing image datasets and two machine learning benchmark datasets. The results demonstrate that remote sensing image classification models are susceptible to MIAs, and our framework can successfully defend against white-box MIA while achieving an excellent global model.
1. Introduction
Remote sensing is a technology that uses sensors (e.g., satellites, airplanes) to detect physical features in a non-contact, long-distance manner [1,2]. In recent years, with the increasing deployment of remote sensing satellites, the magnitude of remote sensing data has also grown dramatically. To analyze and utilize these remote sensing image data, more scholars apply state-of-the-art deep learning techniques for remote sensing image data analysis, such as scene classification [3,4] and object detection [5]. As we know, deep learning models significantly benefit from the size and quality of the training dataset. However, in practice, on the one hand, remote sensing data need to be collected from different companies [6]. On the other hand, remote sensing data cannot directly be shared because they are usually sensitive and contain trade secrets, which may leak information about sensitive infrastructure or military facilities [7]. This is one of the major problems affecting the practical application of deep learning algorithms in remote sensing. To solve this problem, federated learning has been researched and applied to remote sensing [8,9,10,11].
Federated learning allows participants to collaboratively train an efficient global model by sharing the parameters of a local model instead of sensitive data. However, in recent years, scholars have found that federated learning is vulnerable to various inference attacks launched against model parameters, such as adversarial attacks [12,13], backdoor attacks [14], and membership inference attacks [15]. In this paper, we focus on the membership inference attack, the goal of which is to infer whether a specific data point is participating in the model’s training process. Suppose an attacker successfully launches a membership inference attack against a participant, the attacker can infer the location, time, and equipment type of the company’s remote sensing equipment from these membership data. This will be a serious secret disclosure for a remote sensing company.
Recently, scholars have proposed some approaches to defend against MIAs, which can be summarized as confidence score masking [16,17,18] (hiding the target model’s true confidence scores), regularization [16,18,19,20,21] (reducing the overfitting of the target model), knowledge distillation [22,23] (transferring the private large model’s knowledge to the small one through an unlabeled public dataset), and differential privacy [15,24,25] (adding noise to parameters during the model training). For defending against white-box MIAs in FL, researchers have mainly focused on regularization and differential privacy [15,26,27,28,29]. However, the majority of them struggle to balance the privacy preservation and model utility for the deep neural network with high dimensional parameters. Some scholars attempt to encrypt the model parameters with homomorphic encryption [11], which can guarantee the model’s effectiveness while taking into account the privacy and security of the model. However, for complex remote sensing images and classification models, it leads to huge computational and communication costs.
To solve the abovementioned problems, we propose local differential privacy federated learning (LDP-Fed) in this paper. It is a private FL system that allows participants to train DNN models jointly under the protection of LDP. The main inspiration for our LDP-Fed is that adversaries launch membership inference attacks by collecting a set of local or global model parameters in FL. Based on this point, it is different from the central differential privacy, which adds noise during local model training [24]. We perform a piecewise mechanism (PM) on the local model parameters before they are delivered to the central server so that participants satisfy local privacy guarantees. As far as we know, there have been some works [28,29] that applied LDP mechanisms to FL to protect local model parameters. They added the same level of LDP noise to the parameters of each dimension separately. Hence, to improve the model performance, they must either increase the overall privacy budget or the number of federal learning participants, which may reduce the framework usability or raise the risk of privacy disclosure. To show the effectiveness of LDP-Fed, we evaluated LDP-Fed on various datasets. The experimental results demonstrate that LDP-Fed could defend against white-box MIAs while having a minor impact on the utility of complex DNN models. The contributions are summarized as follows:
- We propose and implement LDP-Fed to defend against white-box MIAs in the federated learning system on remote sensing, especially for global attacks launched from the central server. It allows participants to collaboratively train DNN models with formal LDP guarantees.
- To achieve optimal privacy-utility trade-offs, we optimize the noise addition method according to the characteristics of white-box MIAs and apply the piecewise mechanism (PM) that is more suitable for the parameters of the DNN models in LDP-Fed. It gives our framework more utility than others while resisting white-box membership inference attacks.
- We extensively evaluate LDP-Fed on various datasets to show the advanced trade-offs of the local participants’ privacy and model utility. For the remote sensing image dataset NWPU-RESISC45 with VGG, it reduced the adversary advantage Adv of global attacks from 46.2% to 10.6% while decreasing the model accuracy by 5.0%.
The rest of our paper is organized as follows: Section 2 presents some related works and background techniques related to the subject of this paper, then an overview of the LDP-Fed framework and details of the LDP-Fed framework are presented in Section 3. Section 4 and Section 5 present the experimental setup and experimental results with analysis and comparison. Section 6 concludes this paper.
2. Related Works and Background Techniques
2.1. Related Works
The development of deep learning algorithms, especially image recognition algorithms, has led to their application in remote sensing, such as scene recognition and object detection. With the increase in remote sensing equipment, the distribution of remote sensing data has become decentralized, with multiple entities (remote sensing companies) holding a small volume of data. To enhance the model’s effectiveness while guaranteeing the security of remote sensing data, scholars have widely used federated learning in remote sensing [30,31,32]. However, it still suffers from some security issues, such as adversarial attacks, backdoor attacks, and especially membership inference attacks. These attacks target the model’s parameters and pose serious security problems for federated learning. There are some typical works on traditional FL applications for these attacks but less research on remote sensing. Therefore, we propose the LDP-Fed framework for MIA in FL on remote sensing. We will describe related work in three aspects: the application of machine learning in remote sensing, membership inference attacks, and defense against membership inference attacks.
2.1.1. Machine Learning in Remote Sensing
The research on remote sensing image data classification using state-of-the-art machine learning models has been studied by scholars for many years [33,34]. Geiß et al. [35] followed the idea of learning invariant decisions function to address the problem of the efficient classification of remote sensing images under sparse data. They proposed a virtual support vector machine based on self-learning (VSVM-SL). In the same period, Wang et al. [36] used the efficient random forest (RF) algorithm to classify remote sensing image data, and the results showed that RF can achieve a superior and more stable classification performance than SVM on the land-cover dataset. With the development of deep learning algorithms, convolutional neural networks (CNN) have emerged as the most promising technique for remote sensing image classification. Zhang et al. [37] proposed the model architecture named CNN-CapsNet to improve the performance of the scene classification model for remote sensing images. Their model utilizes the convolutional layer of a pre-trained convolutional model for feature extraction from the image and then uses CapsNet to classify the intermediate features. In contrast, Li et al. [38] used a convolutional neural network for remote sensing image multi-target scene classification tasks. They proposed MLRSSC-CNN-GNN. The main idea is to generate high-level representation features with the CNN model and combine them with the graph attention network model to fully exploit the scene graph’s spatial-topological relationship. Tang et al. [39] proposed a new CNN model attentional consistent network (ACNet), which can improve the model classification performance by emphasizing the local features of an image. Chen et al. [40] proposed CNSPN, a method that better solves the problem of few-shot remote sensing image classification by combining the semantic information of image class names. Along with the successful applications of deep neural networks in remote sensing image recognition, some scholars have focused on the security concerns posed by the models, such as backdoor attacks [11,14] and adversarial attacks [12,13].
2.1.2. Membership Inference Attack
We categorize membership inference attacks into white-box and black-box MIAs according to the attacker’s information obtained from the target model.
Black-box membership inference attack. Shokri et al. [16] first presented the study of MIAs on the classification model. They trained an inference attack model based on the difference in model prediction between trained and untrained data. With the black box setting, they need to train a series of shadow models to simulate the target model, significantly impacting the attack model. Additionally, it is shown in [16] that overfitting was highly correlated with MIAs, and the techniques that can mitigate over-fittings, such as L2 regularization and dropout, could weaken the effect of an MIA. Yeom et al. [41] proposed another inference attack model based on quantitatively analyzing the difference in the model’s loss between the training and the testing dataset to simplify the MIA. Salem et al. [21] attempted to decrease the shadow model’s number in [16] and proposed a lighter-weight MIA strategy. These schemes rely on black-box features of the target model, such as model prediction, to launch the attack.
White-box membership inference attack. Unlike the previous works, Nasr et al. [27] proposed a comprehensive white-box MIA framework. They assumed that attackers held some knowledge about the training dataset. To obtain the training dataset for the attack model, they use forward and backward propagation to obtain all the model outputs at the data points (e.g., gradients of the data, neuron outputs, and model losses). A one-hot value is added, representing whether the data point participates in the target model training. Their attacks achieve a better performance than the black-box setting. Nasr et al. [27] pointed out that the MIA effect is improved in the FL scenario due to the frequent communication enabling the attacker to acquire more helpful knowledge.
2.1.3. Defense Mechanism against Membership Inference Attack
As MIAs have demonstrated efficiency on various DNN models, researchers have proposed many protection solutions to defend against MIAs. Here, we summarize the existing schemes into four categories, i.e., confidence score masking, regularization, knowledge distillation, and differential privacy. We introduce them separately. In Table 1, we compare various aspects of the existing schemes with those of LDP-Fed.
Confidence score masking. The motivation for confidence score masking is that defenders could hide some prediction information from the attacked model to mitigate black-box MIAs. Shokri et al. [16] proposed sharing the top-k confidence scores with the attacker instead of providing the complete prediction vector. Jia et al. [17] proposed a defense method called MemGuard using the adversarial machine learning technique. However, follow-up works [23,42] proved that neither could completely defend against membership inference attacks.
Regularization. The overfitting problem of machine learning is an important cause of membership inference attacks [16,43,44], and regularization can effectively mitigate overfitting. Therefore, many scholars have analyzed the effectiveness of various regularization methods to defend against MIA (e.g., L2-norm regularization, dropout, early stopping, and label smoothing [45]). Apart from that, regularization methods are specifically used to defend against MIAs. Nasr et al. [19] proposed adversarial regularization. Li et al. [20] proposed Mixup+MMD (Maximum Mean Discrepancy) to mitigate MIAs. Kaya et al. [45] applied data augmentation to machine learning and compared it with classical regularization methods to demonstrate that data augmentation can effectively defend against MIA experimentally.
Knowledge distillation. Knowledge distillation is often applied as an efficient model compression and acceleration technique in machine learning model deployment. It trains a small “student model” that is transferable by extracting the knowledge from an extensive deep neural network “teacher mode” with high generalization ability since the output vector of the teacher model may contain much potential information about itself [46]. Based on knowledge distillation, Shejwalkar et al. [22] proposed the DMP (Distillation for Membership Privacy) method to defend against MIAs. Unlike the conventional model training process, DMP first trains an unprotected teacher model on their private dataset and then uses the teacher model to classify an unlabeled public dataset as their soft labels. Finally, training the student model with a portion of the soft-labeled dataset. Because DMP requires additional public datasets, Zheng et al. [47] proposed complementary knowledge distillation (CKD) and pseudo complementary knowledge distillation (PCKD) that allows the process of knowledge distillation without the need for additional public datasets.
Differential privacy. Differential privacy [48] is an excellent privacy protection framework that strictly quantifies privacy by the privacy budget and provides different mechanisms to suit all data types. Since Abadi et al. [24] proposed DP-SGD (differential privacy stochastic gradient descent) for DL, DP has been widely employed in DL. The main idea of DP-SGD is to clip the gradients to obtain a bounded local sensitivity and add Gaussian noise to it. Abadi et al. [24] calculated the privacy cost by applying “moments accountant” to reduce the maximum privacy upper bound. DNN models trained with DP-SGD can effectively defend against MIAs but suffer a significant loss of model utility.
2.2. Background Techniques
2.2.1. Federated Learning
FL was proposed in the form of collaborative learning by Google in 2017 [49]. The importance of FL is that it enables participants to train high-quality machine learning models without sharing the original dataset directly, which may pose privacy concerns. First, N participants with the same private dataset structure agree on training a typical machine learning model with the same architecture. At each iteration, local participants receive the weights from the central server, perform local training with their private dataset, and finally submit their gradients or local model weights to the server. After that, the central server gathers and averages the gradients or model weights from clients. Afterward, the global model’s parameters are distributed to the participants again, and the next iteration starts. This process will iterate until the global model converges or completes a predetermined number of iterations.
2.2.2. Local Differential Privacy
As a variant of DP, local differential privacy [50] aims to enhance the privacy protection of local participants. It allows each participant to perturb sensitive data before being uploaded to the central server. Consequently, the aggregator has no access to the original dataset from the participants. It provides better privacy protection for the participants. The definition of -LDP is given below:
where is the privacy budget, which controls the privacy guarantee of mechanism , a smaller means stronger privacy protection, and denotes probability.
Definition 1.
(-Local Differential Privacy). A randomized algorithm satisfies ϵ-LDP, if and only if for any two input values v and in the domain of , and any possible output Y of , we have:
In addition, similar to DP, LDP also holds two widely-used properties [51]: post-processing and sequential composition. The former property states that it is always privacy-guaranteed to perform arbitrary computations on the output of a differentially private mechanism. The latter property offers the ability to bound the total privacy cost of releasing multiple results of differentially private mechanisms on the same input data.
Theorem 1.
(Posting-Processing). Let be a ϵ-LDP mechanism, where x is the input of , then for any (deterministic or randomized) function G, satisfies ϵ-LDP.
Theorem 2.
(Sequential Composition). Given n mechanisms {} satisfy -LDP, respectively, where x is the same input to all of the mechanisms, then for a new mechanism satisfies -LDP.
2.2.3. Piecewise Mechanism
Piecewise mechanism (PM) [50] is a random algorithm that privately analyzes user data’s mean value and frequency estimate. Meanwhile, it also ensures that the user side satisfies the -LDP. An aggregator will calculate the mean value over all n users in this setting. However, instead of raw data t, users send the data perturbed by PM, and PM guarantees that t is an unbiased estimate of .
Theorem 3.
Let and , with at least probability,
Different from the Laplace mechanism [52] and Duchi et al.’s method [53] for one-dimensional data, PM will adjust the probability destiny function according to the input value, which leads to a lower worst-case variance compared to Duchi et al.’s and Laplace mechanism’s . It is easy to prove that the PM has a lower variance than Duchi et al.’s method when . Additionally, the worst-case variance of the Laplace mechanism and PM will decrease dramatically as increases. However, PM’s worst-case variance is still lower than that of the Laplace mechanism, as illustrated in Figure 1.
2.2.4. Membership Inference Attack in Federated Learning
As for the MIA, the primary goal of the attack is to detect whether a data point belongs to the training dataset of the target model . We separate this type of attack into white-box and black-box MIAs depending on the attacker’s information about the attacked model [27]. For the white-box setting, an attacker can obtain all information (i.e., model parameters, model architecture, loss function) about the target model and use these features to train its attack model. However, an attack can only access the model through queries for the black-box attack. This paper focuses on the white-box MIA due to the FL setting.
Unfortunately, federated learning is easily attacked by MIAs. As shown in Figure 2, the adversary may be one of the participants or the CS. In this paper, we set a curious parameter server that can receive the gradients or parameters from each participant and perform a passive white-box MIA on all the local participants, respectively. The local side attacker can only observe a fraction of updated global models, so it achieves a lower attack accuracy than the global attacker. Meanwhile, MIA accuracy declines as the number of participants decreases [27].
3. Methodology
3.1. Overview of LDP-Fed
The rapid development of machine learning techniques has motivated the broad application of deep learning-based image recognition in remote sensing. To improve the model’s effectiveness while ensuring the security of remote sensing data, federated learning has also been widely used in remote sensing. However, frequent transmission of local model parameters in federated learning can lead to membership inference attacks on participants’ remote sensing data, which are launched against the parameters of a model. Suppose an attacker launches membership attacks on a remote sensing company participating in federated learning. In that case, it can infer the location, type, and time information about the company’s satellites through the membership information, resulting in a severe security risk to their satellites. Therefore, this paper proposes LDP-Fed, which aims to train an excellent global model while guaranteeing the security of participants’ sensitive data.
3.1.1. Main Motivation of LDP-Fed
The target model’s generalization gap (i.e., loss gap) between the model on the training dataset and the test dataset is the fundamental reason for the membership inference attack [22,54,55], which is due to the continuous fitting of the training dataset by the deep learning model during the training process. However, in the FL scenario, attackers can obtain more information about the model, enhancing the MIA’s effectiveness. Hence, the methods generally used in the black-box MIA scenario for a defender cannot apply to FL. Local differential privacy is the best option to solve this problem. Participants use local differential privacy algorithms to perturb the parameters of the local model during interaction to reduce the privacy risk. However, the direct use of LDP brings a huge model utility loss, so we designed LDP-Fed for MIA attacks. We chose more appropriate LDP algorithms and allocated a reasonable privacy budget to achieve a better trade-off between member privacy and model utility, and we improved the practicality of the LDP-Fed framework.
3.1.2. Framework of LDP-Fed
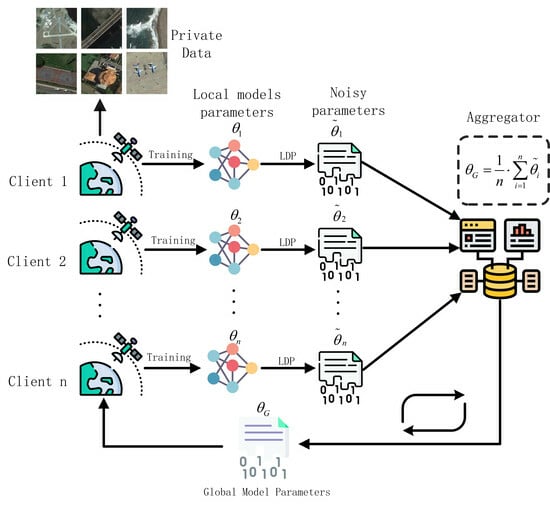
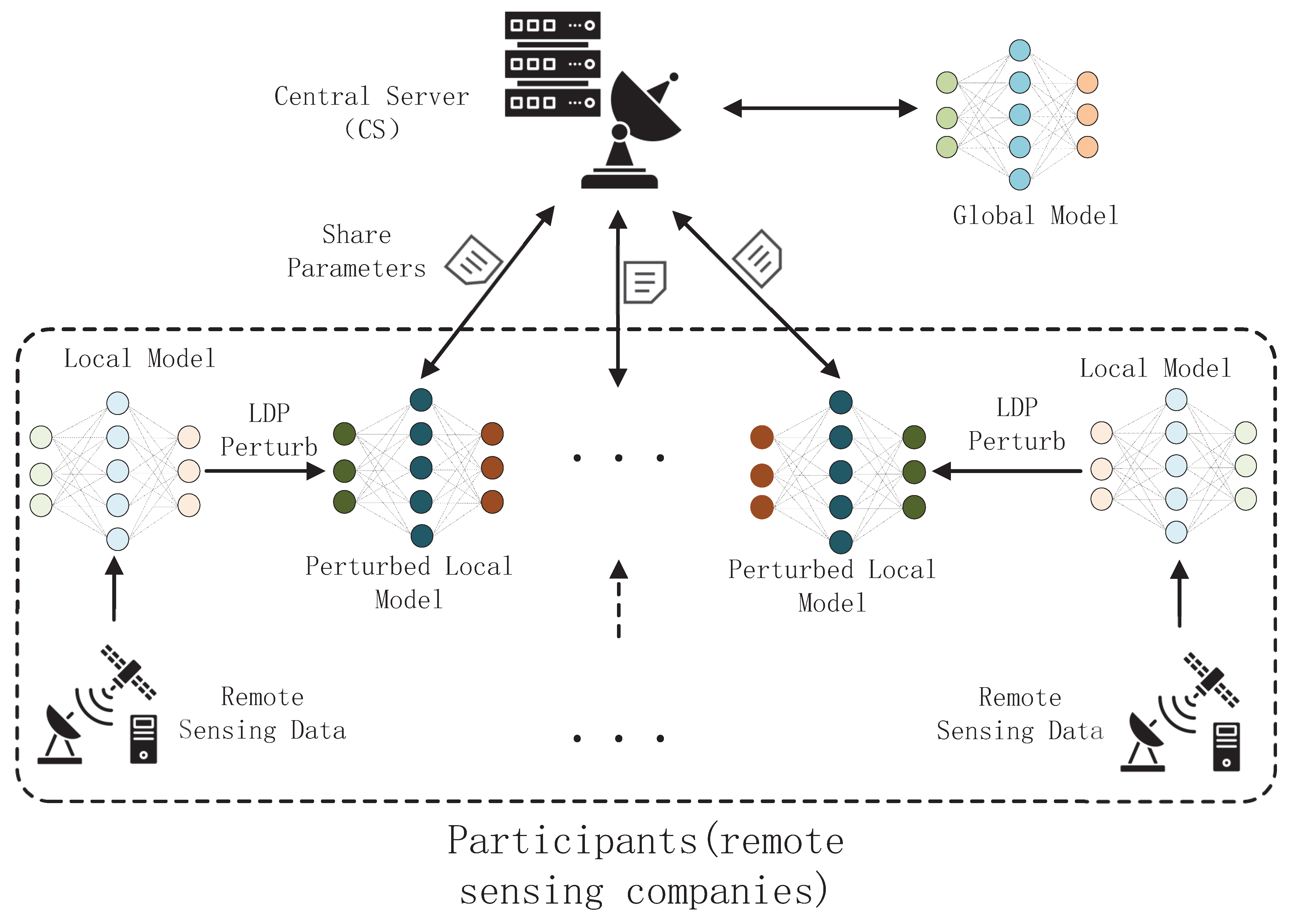
As shown in Figure 2, our LDP-Fed mainly contains two parts: (1) Central Server (CS) and (2) Participants. We apply the local differential privacy to FL to protect the parameters of local models and prevent attackers from obtaining information about the local models’ training dataset through parameters.
(1) CS is responsible for communicating with local participants to collect and aggregate local models’ parameters. After aggregating the local models into a global model, CS releases the model information to the chosen participants to perform local training and start the next iteration.
(2) Participants are remote sensing companies involved in federated learning. These companies collect remote sensing image data via private satellites and intend to train a more efficient global model collaboratively. At the beginning of FL, participants initialize their local model based on the parameters distributed by the CS (i.e., global model parameters). Then, the participants start to perform local training using their private remote sensing dataset. Then, participants perturb their local model’s parameters through the LDP algorithm, upload the perturbation parameters to CS, and wait for the next iteration.
Different from the traditional FL framework, which transfers local models’ parameters directly, we perturb the parameters by PM that make the FL process satisfy local differential privacy and can defend against white-box MIAs effectively.
3.1.3. Adversary Model
This paper assumes that the CS and participants are honest but curious. Even though they strictly perform local model training, they remain interested in obtaining the private training dataset of other remote sensing companies to infer the private information of their satellites. Under this assumption, we present the passive adversary , which has auxiliary data points; a part of that is sampled from the training dataset of the victims. The remaining parts have the same distribution as the training dataset but have not been involved in the model training and launch a white-box MIA to infer whether a data point appears in the training dataset of participants. has the following capabilities:
(1) can compromise CS to spy on the participants’ local training process, collect all the local models from any participants, and launch the passive white-box MIA.
(2) can compromise one remote sensing company, different from the CS situation. It can only observe a series of global models and launch a white-box MIA.
3.1.4. Privacy Requirement
In LDP-Fed, we attempt to protect the private data in each participant’s private remote sensing data from disclosure. In this paper, we mainly focus on the MIA, which is a highly prevalent and efficient attack in federated learning. Therefore, we require our LDP-Fed framework to be defensible against passive white-box MIA launched from the CS and the participant sides during the process of FL training. It means that the adversary fails to distinguish whether a specific data point belongs to the training dataset of a local participant.
3.2. Details of LDP-Fed
Here, we first describe the steps of LDP-Fed illustrated in Algorithm 1, and we presente key details of LDP-Fed as shown in Figure 3.
3.2.1. Federated Learning with LDP
In federated learning, we consider K participants with the same remote sensing data structure who want to train a remote sensing scene classification model collaboratively. During the training process of FL, each participant performs the local model training by its private remote sensing image dataset and shares the local model’s weights with the CS. However, to defend against membership inference attacks, we apply PM to FL and propose LDP-Fed. As shown in Algorithm 1, we present our LDP-Fed training process from the perspective of the central server and the local participants separately.
Cloud update. The central server side is similar to the traditional FL framework. First, it generates the target model with the initial parameters and sends it to each client with a privacy budget . Then, the server waits for responses from the clients selected by the k-clients selection module. At every iteration in FL, the k-clients selection module will select clients with probability , where n is the total number of the local clients. Upon getting responses, the central server aggregates and averages all the updated parameters from the local clients and sends the results back to the clients. After that, the central server moves on to the next iteration.
Clients Update. For the clients, they are participants in federated learning, and each client is a remote sensing company with a private image dataset. At each communication round r, the selected clients will update their local models using weights sent from the central server. Next, they will use their private remote sensing dataset to perform the local training by the SGD (stochastic gradients descent) [56] in parallel. Then, the clients will send the updated local models’ weights back to the central server and wait for the next iteration. However, they integrate the PM into this process for client-level security concerns. Before the clients send the updated models’ weights back to the central server, each parameter will be clipped and then perturbed by PM with the privacy budget as shown in Algorithm 2. They allocate privacy budgets based on the model’s different layers, unlike the previous methods [28,29] of allocating privacy budgets equally. The privacy budget allocation is described in Section 3.2.4.
| Algorithm 1: LDP-Fed. |
 |
| Algorithm 2: PM_Perturbation. |
 |
This process between the central server and local clients will continue until the target model converges or reaches maximum communication rounds (iterations).
3.2.2. Parameter Norm Clipping
Considering the LDP-Fed system’s overall privacy budget and communication costs, we transfer the local model’s weights, which the local private dataset has trained for three epochs. Therefore, the input value of Algorithm 2 is likely not in the range of [−1,1] compared with the FL system, which transfers the model gradients. To satisfy the local differential privacy of Algorithm 1, we have to bound the perturbed local model weights into [−1,1]. Thus, in Algorithm 1, we have to clip each parameter in before they are perturbed by Algorithm 2, i.e., for a parameter replaced by . The clipping ensures that if , then the parameter is preserved, whereas if gets scaled down to be 1 or −1.
3.2.3. Parameter Perturbation
After norm clipping, we subject the parameters to perturbation based on the PM. Specifically, Given a weight of local model from local client , PM outputs a perturbed value , where
and the PM’s probability density function (pdf) is a piecewise constant function as follows:
where
In Algorithm 2, we show the pseudo-code of PM. We apply PM in our LDP-Fed because, compared with previous mechanisms (the Laplace mechanism and Duchi et al.’s method), PM performs better when dealing with neural network parameters, which have high precision (5–10 digits after decimal points). Given numeric data t to the LDP mechanism, the algorithm returns perturbed data , and is the unbiased estimator of the original data t. However, different LDP mechanisms have variances for . The variances of PM, Duchi’s solution, and the Laplace mechanism are , ,, respectively. PM has a smaller variance when dealing with smaller values, while Duchi et al. ’s has a larger variance.
3.2.4. Privacy Budget Allocation of LDP-Fed
The privacy budget allocation is vital for applying PM to the FL system. PM is a design for the single numerical attribute collection, so we have to use PM for each parameter of the target model. As shown in Algorithm 1, we assume the FL system has a total of E iterations, n clients, and an overall privacy budget . At each iteration, randomly select k clients for target model updating. Based on the composition property of LDP [57], to guarantee -LDP, Truex et al. [28] and Sun et al. [29] split the privacy budget into E small pieces and hold . At each iteration , the small piece of the privacy budget will be allocated equally to every dimension of the model parameters, just as , where the represents the total numbers of the model parameter uploaded to the central server. However, this type of privacy budget allocation assumes that the parameters are identically sensitive to LDP noise. This may lead to a less accurate DNN model or be ineffective in defending against white-box MIAs in FL. Our experiments found that the DNN model’s former layers are more noise-sensitive. As the layers increase, the robustness of the parameters increases. This is due to the former layers extracting features from the training dataset and generalizing better than the later layers. Thus, a slight change could be reflected in the DNN model’s accuracy. Another important point is that, in [27], their experiments showed that among the layers of the target model, the latter leak more information about the training dataset than the former layers, especially for the last layer. As shown in Theorem 3, the asymptotically optimal error bound of PM is . To increase the target model utility, it has to increase the privacy budget for each parameter when we fix clients’ number k, which may result in privacy leakage from the later layers’ parameters when k is small.
Combining the twofold, we suggest that the defender allocates more privacy budget to the former layers of their model when using LDP to defend against white-box MIAs in FL. Specifically, given a total privacy budget in our LDP-Fed, we allocate it equally to each iteration. In each iteration, we allocate the privacy budget for all parameters in the last layer as . Moreover, for the parameters of layer l, we allocate the privacy budget . In our experiments, we set uniformly.
4. Experimental Setup
In this section, we briefly introduce the experimental setup. It contains the dataset information, the target model’s architecture and hyperparameters in FL, the white-box inference attack model setup, and the metrics for model performance.
4.1. Datasets
To evaluate our experiments, we used four datasets: two famous remote sensing image datasets, EuroSAT and NWPU-RESISC45, and two standard image recognition benchmark datasets, Fashion-MNIST and CIFAR10.
EuroSAT was proposed by Helber et al. [58], which is a satellite image dataset based on Sentinel-2. EuroSAT provides 27,000 non-overlapping color pixels images and is classified into ten categories, as shown in Figure 4. Researchers often use it as a benchmark dataset for land use and land cover issues in remote sensing image recognition.
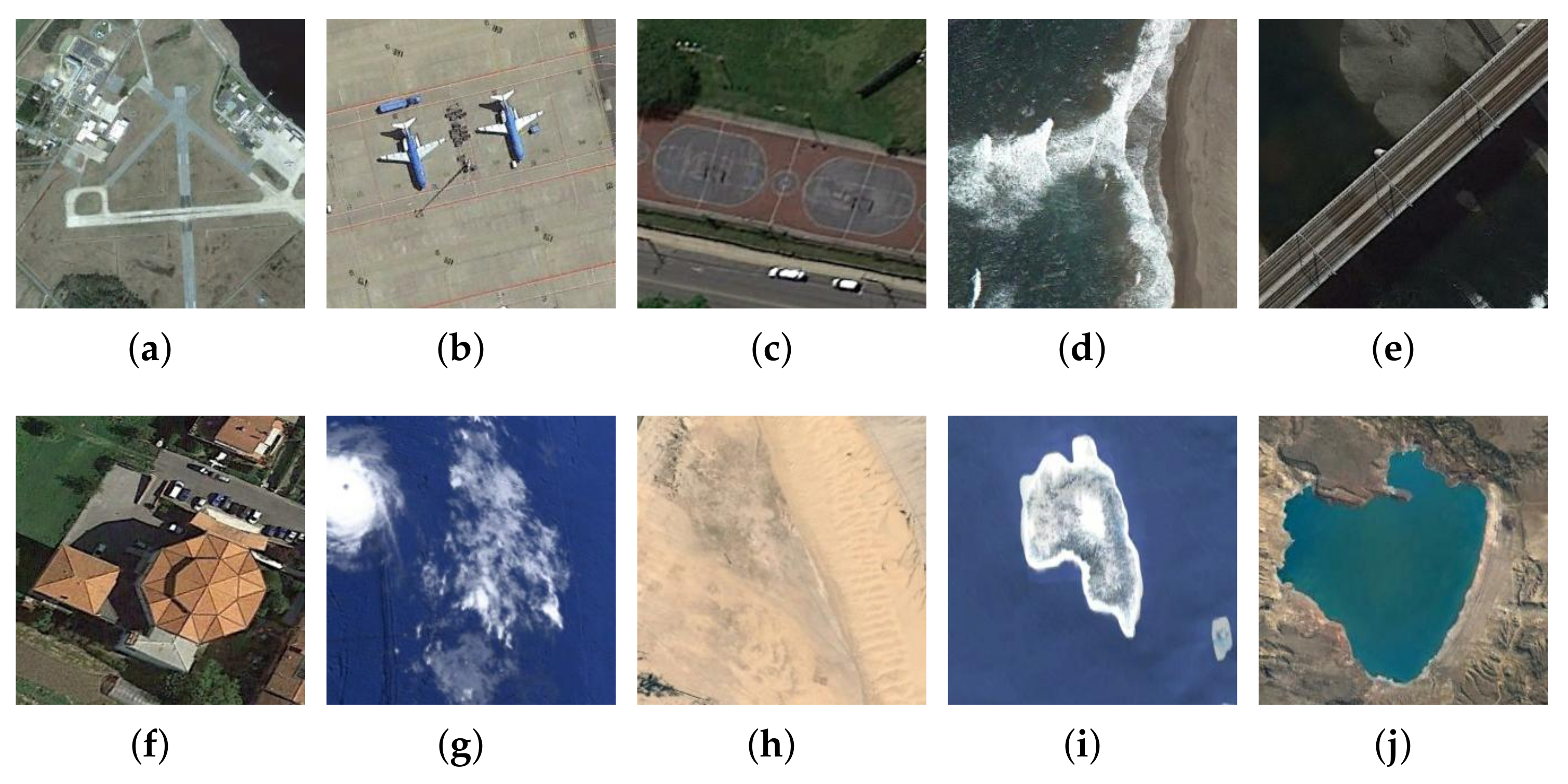
NWPU-RESISC45 [59] was created by Northwestern Polytechnical University (NWPU) as a benchmark dataset for remote sensing image scene classification. It consists of 31,500 remote sensing images that cover 45 scene categories, with 700 images in each category. Due to its large-scale scene categories and data quantity, it is widely used in remote sensing image classification tasks. In Figure 5, we present part of the scene images of NWPU-RESISC45.
Fashion-MNIST [60] contains 60,000 training images and 10,000 testing images containing pixels gray-level (0 to 255). A classification task is trained to recognize the ten clothing labels of the input images (e.g., t-shirt, trousers, and dress).
CIFAR10 [61] is a popular benchmark dataset used to evaluate image recognition algorithms. The dataset consists of 32 × 32 color pixels and contains 50,000 training and 10,000 validation images drawn from 10 classes.
4.2. Target Model Setting
We investigated LDP-Fed on the datasets mentioned previously. For EuroSAT, we used a three convolutional layers and a two fully connected layers convolutional neural network (CNN). As for Fashion-MNIST, we used a six-layer (1024,512,256,128) fully connected neural network (FCN), which had been used by Nasr et al. [27] for a target model to be attacked. The features and label size of the dataset determine the size of the input and output layers. For the CIFAR10 and NWPU-RESISC45, we used the Alexnet [62] and VGG [63] models, respectively. We trained our model with the Adam [64] optimizer with a 0.001 learning rate.
We used two federated learning settings to verify the robustness of the LDP-Fed and the effectiveness against the white-box MIA. Specifically, we chose the parameters averaging the aggregation method in FL. At every iteration in FL, each selected participant sends the updated local model’s parameter to the central server after training three epochs. We uniformly used the same dataset size for all the participants. For the former, we used four datasets, and the sizes are shown in Table 2. We averaged all the data points for all of the participants, which do not overlap between various participants. We continued the experiment’s setup in [27] for the latter. We set four participants in FL, and the sizes of the datasets are shown in Table 3.
4.3. Threat Model Setting
We implemented the MIA with TensorFlow and Keras. The architecture of our threat model is the same as Nasr et al.’s [27] supervised learning part. When a global attacker launches a white-box MIA against a participant, the attacker first actively collects the local models uploaded by the participant. Then, it obtains all the helpful information, just like the model’s output, hidden layers’ output, and the gradients of the loss to the parameters by forward and backward passes as the input features of the attack model. Finally, a binary classification attack model is trained by supervised learning. However, the target model is changed to the global model when the attacker is a local participant. An attacker can launch an MIA at any epoch during the FL training process. In this paper, we uniformly set it to 120, which may lead to a better attack performance [27].
4.4. Metrics
To quality the model’s utility in FL, we used its top-1 accuracy on the testing dataset, . We tested our attack model’s accuracy on a dataset consisting of half members and half non-members. However, on the dataset, a random guessing strategy has an accuracy of 50%. Thus, to quantify the performance of the attack model, we followed [20,41,45] to use the adversary advantage metric , defined as its accuracy over a balanced 1/2 as a percentage, i.e., .
5. Experimental Results and Discussion
Here, we present our experimental results for the LDP-Fed defense effectiveness to the white-box MIA in remote sensing, followed by results for analyzing the effect of parameters in LDP-Fed on its performance.
5.1. Defende against White-Box MIA
Unconstrained attack. We presented the performance of the membership inference attack without deployment defense in Table 4. All four datasets suffered from white-box MIAs to varying degrees, especially for the more complex remote sensing image datasets EuroSAT and NWPU-RESISC45. It indicates that remote sensing image classification models are more vulnerable to membership inference attacks. Further, we can conclude that a global attacker is more effective than a local attacker (e.g., 46.4% vs. 25.8% attack on EuroSAT and 44.6% vs. 26.3% on CIFAR10). This is because the model updated by the local clients contains more information about the clients’ training data than the averaged model in an iteration of the FL.
LDP against white-box MIAs in FL. We first have to provide good utility for the FL model when . Thus, we chose different values for the four datasets based on the results of the previous experiment. As shown in Table 4, we set for EuroSAT, for CIFAR10, for NWPU-RESISC45, and for Fashion-MNIST. They achieved , , , and , respectively. Our LDP-Fed can significantly reduce the white-box MIA’s effectiveness while maintaining a high testing accuracy on global models. Under this LDP setting, a passive global attacker is decreased dramatically for all four datasets. For EuroSAT, CIFAR10, and NWPU-RESISC45, LDP reduced attack by more than 70% over the baseline attack , and for Fashion-MNIST, by almost 82%. In Table 4, we also presented the results of the LDP defending against a local passive attacker. We observed that LDP reduces the risk slightly compared to a global attacker: on EuroSAT, CIFAR10, Fashion-MNIST, and NWPU-RESISC45, it reduced the attack by nearly 30%. Fortunately, the efficiency of local attackers decreases quickly and naturally as the number of participants increases, because averaging in the FL scenario may decrease the effects of each party [27].
Why does LDP-Fed work? In Figure 6, we recorded the performance of the local and global models on four datasets during LDP-Fed’s training process. Specifically, we recorded the updated local models’ training and testing accuracy, the testing accuracy of the local models after LDP perturbation, and the testing accuracy of the aggregated global models at 30, 60, 90, 120, and 150 epochs, respectively. The experimental results showed that the local and global models converge after 30 epochs, and the perturbation effect of LDP on the local models is evident. It seriously reduced the testing accuracy of the local models by around 40–50 percentage points for all datasets, while the aggregated global model still performs well after aggregation. LDP perturbation caused dramatic changes in the local models’ parameters, leading to significant inaccuracies in a global attacker’s training dataset. That is why the LDP-Fed is so effective in defending against attacks launched from the global side. The global model received by the client still maintained a good performance, resulting in LDP-Fed being less effective than the global attacker in defending against the local attackers.
5.2. Hyperarameter of LDP-Fed Analysis
As shown in Figure 7, to evaluate the relationship between the client’s number n and the global model testing accuracy in FL, we fixed the privacy budget . We changed the client’s number n in four different datasets. We observed that the LDP-Fed models perform better with the increase of n, even as close as the undefended models. However, after , they almost hold the same performance distance between LDP-Fed and undefended models no matter the change of n. This is because, as shown in Theorem 3, the error between the mean of the original data and the perturbed data by PM is constrained by the privacy budget and the number of participants n. The error decreases rapidly as the number of participants increases. In practice, the number of clients n still should be ten or more to get an acceptable model performance in our LDP-Fed.
Another important hyperparameter to the LDP-Fed is the privacy budget . As shown in Figure 8, we analyzed the effect of on model performance. Specifically, we set n to 20 in FL and presented the accuracy results with from 1 to 7 for all four datasets. It showed that the accuracy would increase as increases. We observed four different as an inflection point on EuroSAT , Fashion-MNIST , CIFAR10 , and NWPU-RESISC45 . The model’s accuracy dropped rapidly when was less than the point. On the contrary, the accuracy increased slowly and was close to the undefended model’s performance. Furthermore, more complex datasets or DNN models require more privacy costs. This is because of the more sophisticated neural network and more model weights.
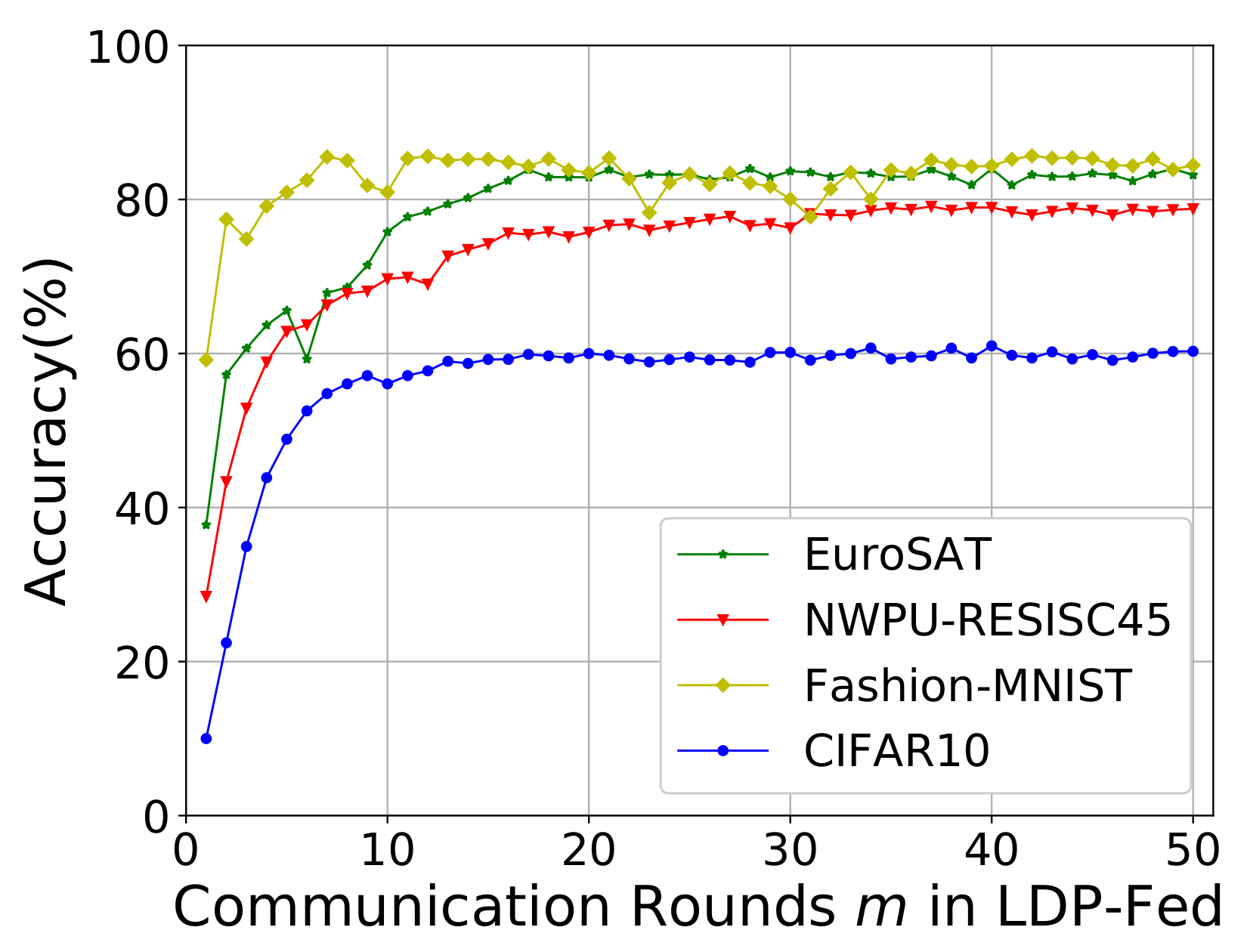
In addition, we evaluated the model convergence rate, which determines the communication costs between clients and the central server in LDP-Fed. As shown in Figure 9, for Fashion-MNIST, the models converged within ten communication rounds. For the rest of the dataset, limited by model complexity and sensitivity, they need more than 15 communication rounds to achieve a better performance. Our LDP-Fed is convenient for training an excellent model within an acceptable communication cost.
5.3. Performance Comparison
Comparison with DP-SGD. As a gold standard, DP provides theoretical privacy guarantees. Abadi et al. [24] proposed DP-SGD to protect against privacy leakage in machine learning. Essentially, DP-SGD clipped and added Gaussian noise to the gradients computed on the private dataset during model training to limit the influence of a single sample on the target model. In this paper, we followed the method of Naseri et al. [15], which applied the DP-SGD to the local models training process of the FL. We compared LDP-Fed and DP-SGD using the empirically observed trade-offs between membership privacy and global model accuracy.
We used CIFAR10 with Alexnet and chose two different privacy budgets for the DP-SGD, (same with LDP-Fed privacy budget setting), (suggested by [15]), and in both cases. We presented the experimental results in Table 5. As shown in Table 5, our LDP-Fed and DP-SGD did mitigate the white-box MIA for a global attacker. However, LDP-Fed could achieve a better defensive performance while obtaining a target model with higher testing accuracy. When we set the privacy budget of DP-SGD to 2.0, both global and local attackers were almost ineffective. However, this accompanied a loss of more than 31% of model accuracy. As we anticipated, DP-SGD performed better against the local attackers. Unlike DP-SGD, which adds noise during local model training, LDP-Fed-aggregated perturbed parameters were unbiased estimates of the original parameters, meaning the global LDP-Fed models have much less noise compared with DP-SGD.
Comparison with other LDP-FL. In Figure 8, we set for all the datasets. Our LDP-Fed achieved 73.4% accuracy with , 77.9% accuracy with , 83.8% accuracy with , and 59.3% accuracy with on EuroSAT, NWPU-RESISC45, Fashion-MNIST, and CIFAR10, respectively. To our knowledge, the results are very competitive with previous works. Geyer et al. [65] first applied DP under Gaussian Mechanism to federated learning to preserve clients’ level privacy. While they only achieved 78%,92%, and 96% accuracy with on MNIST with differential privacy, where represented the privacy budget, communication rounds, and clients number, respectively. LDP was first exploited for federated learning by Bhowmick et al. [66]. However, due to the high variance of their LDP algorithm, to improve the convolutional neural network model’s accuracy to 10 percent of the original value, they required a relatively large privacy budget and communication rounds, i.e., CIFAR10 . Truex et al. [28] utilized condensed local differential privacy (CLDP) to FL and up to for Fashion-MNIST. Unlike the DP privacy budget , -CLDP’s privacy budget is controlled by the parameter . However, -CLDP achieved the accuracy by requiring a high privacy budget (e.g., ), which may cause a weak LDP guarantee. Meanwhile, they did not apply -CLDP to a more complex DNN model or dataset. Sun et al. [29] proposed an advanced LDP-Fed recently, which obtained high accuracy while protecting the privacy of the model, i.e., Fashion-MNIST , CIFAR10 . However, they need more than 100 clients in FL because they added the same noise to all parameters. Thus, the number of clients must be constantly increased to reduce the noise’s impact on model performance. In our LDP-Fed, we designed a special noise addition method against MIAs. We can efficiently train excellent complex DNN models with fewer clients than in previous works.
6. Conclusions
As the most promising solution for remote sensing institutions to maximize the potential of data-driven models, FL has been widely used in remote sensing, such as in FL-based image scene classification. However, FL is vulnerable to white-box MIAs, which may lead to the serious disclosure of the participants’ secret satellite sensitive information when we apply FL in remote sensing. To solve the problem, we presented LDP-Fed, a federated learning framework with LDP to defend against white-box MIAs in FL. Unlike conventional federated learning, our system does not require a trusted aggregation server due to local participants perturbing their model parameters with LDP to provide privacy protection. To efficiently train a complex DNN model with LDP guaranteed, we have allocated a reasonable privacy budget according to the network layers. We conducted comprehensive experiments on four datasets, including two benchmark datasets for remote sensing scene classification. Our experimental results demonstrate that remote sensing image classification models are susceptible to MIAs. Furthermore, our framework can defend against membership inference attacks while guaranteeing the utility of the models.
Author Contributions
Conceptualization, Z.Z. and X.M.; methodology, Z.Z.; software, Z.Z.; validation, Z.Z.; formal analysis, Z.Z.; investigation, Z.Z.; writing—original draft preparation, Z.Z.; writing—review and editing, X.M.; supervision, J.M.; All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by Key R&D Program of Shandong Province, China (Grant No. 2023CXPT05); Shenzhen Science and Technology Program (CJGJZD20220517142005013); the National Key Research and Development Program of China under Grant 2021YFB3101100; the National Natural Science Foundation of China under Grant U21A20464, 62220106004, 62072352, and 62261160651; the Key Research and Development Program of Shaanxi under Grant 2023-ZDLGY-52, and Grant 2022GY-029; the Fundamental Research Funds for the Central Universities under Grant ZYTS23167.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yuan, Q.; Shen, H.; Li, T.; Li, Z.; Li, S.; Jiang, Y.; Xu, H.; Tan, W.; Yang, Q.; Wang, J.; et al. Deep learning in environmental remote sensing: Achievements and challenges. Remote Sens. Environ. 2020, 241, 111716. [Google Scholar] [CrossRef]
- Thapa, A.; Horanont, T.; Neupane, B.; Aryal, J. Deep Learning for Remote Sensing Image Scene Classification: A Review and Meta-Analysis. Remote. Sens. 2023, 15, 4804. [Google Scholar] [CrossRef]
- Gadamsetty, S.; Ch, R.; Ch, A.; Iwendi, C.; Gadekallu, T.R. Hash-based deep learning approach for remote sensing satellite imagery detection. Water 2022, 14, 707. [Google Scholar] [CrossRef]
- Ma, D.; Wu, R.; Xiao, D.; Sui, B. Cloud Removal from Satellite Images Using a Deep Learning Model with the Cloud-Matting Method. Remote Sens. 2023, 15, 904. [Google Scholar] [CrossRef]
- Devi, N.B.; Kavida, A.C.; Murugan, R. Feature extraction and object detection using fast-convolutional neural network for remote sensing satellite image. J. Indian Soc. Remote Sens. 2022, 50, 961–973. [Google Scholar] [CrossRef]
- Tam, P.; Math, S.; Nam, C.; Kim, S. Adaptive resource optimized edge federated learning in real-time image sensing classifications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10929–10940. [Google Scholar] [CrossRef]
- Li, K.; Wan, G.; Cheng, G.; Meng, L.; Han, J. Object detection in optical remote sensing images: A survey and a new benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 159, 296–307. [Google Scholar] [CrossRef]
- Ruiz-de Azua, J.A.; Garzaniti, N.; Golkar, A.; Calveras, A.; Camps, A. Towards federated satellite systems and internet of satellites: The federation deployment control protocol. Remote Sens. 2021, 13, 982. [Google Scholar] [CrossRef]
- Büyüktaş, B.; Sumbul, G.; Demir, B. Learning Across Decentralized Multi-Modal Remote Sensing Archives with Federated Learning. arXiv 2023, arXiv:2306.00792. [Google Scholar]
- Jia, Z.; Zheng, H.; Wang, R.; Zhou, W. FedDAD: Solving the Islanding Problem of SAR Image Aircraft Detection Data. Remote Sens. 2023, 15, 3620. [Google Scholar] [CrossRef]
- Zhu, J.; Wu, J.; Bashir, A.K.; Pan, Q.; Wu, Y. Privacy-Preserving Federated Learning of Remote Sensing Image Classification with Dishonest-Majority. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 4685–4698. [Google Scholar] [CrossRef]
- Xu, Y.; Du, B.; Zhang, L. Assessing the threat of adversarial examples on deep neural networks for remote sensing scene classification: Attacks and defenses. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1604–1617. [Google Scholar] [CrossRef]
- Bai, T.; Wang, H.; Wen, B. Targeted universal adversarial examples for remote sensing. Remote Sens. 2022, 14, 5833. [Google Scholar] [CrossRef]
- Brewer, E.; Lin, J.; Runfola, D. Susceptibility & defense of satellite image-trained convolutional networks to backdoor attacks. Inf. Sci. 2022, 603, 244–261. [Google Scholar]
- Naseri, M.; Hayes, J.; De Cristofaro, E. Local and central differential privacy for robustness and privacy in federated learning. arXiv 2020, arXiv:2009.03561. [Google Scholar]
- Shokri, R.; Stronati, M.; Song, C.; Shmatikov, V. Membership inference attacks against machine learning models. In Proceedings of the 2017 IEEE symposium on security and privacy (SP), IEEE, San Jose, CA, USA, 22–24 May 2017; pp. 3–18. [Google Scholar]
- Jia, J.; Salem, A.; Backes, M.; Zhang, Y.; Zhenqiang Gong, N. MemGuard: Defending against Black-Box Membership Inference Attacks via Adversarial Examples. arXiv 2019, arXiv:1909.10594. [Google Scholar]
- Choquette-Choo, C.A.; Tramer, F.; Carlini, N.; Papernot, N. Label-only membership inference attacks. In Proceedings of the International Conference on Machine Learning, PMLR, Virtual, 18–24 July 2021; pp. 1964–1974. [Google Scholar]
- Nasr, M.; Shokri, R.; Houmansadr, A. Machine learning with membership privacy using adversarial regularization. In Proceedings of the the 2018 ACM SIGSAC Conference on Computer and Communications Security, Toronto, ON, Canada, 15–19 October 2018; pp. 634–646. [Google Scholar]
- Li, J.; Li, N.; Ribeiro, B. Membership inference attacks and defenses in classification models. In Proceedings of the the Eleventh ACM Conference on Data and Application Security and Privacy, Virtual, 22 March 2021; pp. 5–16. [Google Scholar]
- Salem, A.; Zhang, Y.; Humbert, M.; Berrang, P.; Fritz, M.; Backes, M. ML-Leaks: Model and Data Independent Membership Inference Attacks and Defenses on Machine Learning Models. In Proceedings of the 26th Annual Network and Distributed System Security Symposium (NDSS), San Diego, CA, USA, 24–27 February 2019. [Google Scholar]
- Shejwalkar, V.; Houmansadr, A. Membership privacy for machine learning models through knowledge transfer. In Proceedings of the the AAAI Conference on Artificial Intelligence, Virtual, 2–9 February 2021; Volume 35, pp. 9549–9557. [Google Scholar]
- Tang, X.; Mahloujifar, S.; Song, L.; Shejwalkar, V.; Nasr, M.; Houmansadr, A.; Mittal, P. Mitigating membership inference attacks by self-distillation through a novel ensemble architecture. arXiv 2021, arXiv:2110.08324. [Google Scholar]
- Abadi, M.; Chu, A.; Goodfellow, I.; McMahan, H.B.; Mironov, I.; Talwar, K.; Zhang, L. Deep learning with differential privacy. In Proceedings of the the 2016 ACM SIGSAC Conference on Computer and Communications Security, Vienna, Austria, 24–28 October 2016; pp. 308–318. [Google Scholar]
- Jayaraman, B.; Evans, D. Evaluating differentially private machine learning in practice. In Proceedings of the 28th USENIX Security Symposium (USENIX Security 19), Santa Clara, CA, USA, 14–16 August 2019; pp. 1895–1912. [Google Scholar]
- Xie, Y.; Chen, B.; Zhang, J.; Wu, D. Defending against Membership Inference Attacks in Federated learning via Adversarial Example. In Proceedings of the 2021 17th International Conference on Mobility, Sensing and Networking (MSN) IEEE, Exeter, UK, 13–15 December 2021; pp. 153–160. [Google Scholar]
- Nasr, M.; Shokri, R.; Houmansadr, A. Comprehensive privacy analysis of deep learning: Passive and active white-box inference attacks against centralized and federated learning. In Proceedings of the 2019 IEEE Symposium on Security and Privacy (SP), IEEE, Santa Clara, CA, USA, 20–22 May 2019; pp. 739–753. [Google Scholar]
- Truex, S.; Liu, L.; Chow, K.H.; Gursoy, M.E.; Wei, W. LDP-Fed: Federated learning with local differential privacy. In Proceedings of the the Third ACM International Workshop on Edge Systems, Analytics and Networking, Heraklion, Greece, 27 April 2020; pp. 61–66. [Google Scholar]
- Sun, L.; Qian, J.; Chen, X. Ldp-fl: Practical private aggregation in federated learning with local differential privacy. arXiv 2020, arXiv:2007.15789. [Google Scholar]
- Fadlullah, Z.M.; Kato, N. On smart IoT remote sensing over integrated terrestrial-aerial-space networks: An asynchronous federated learning approach. IEEE Netw. 2021, 35, 129–135. [Google Scholar] [CrossRef]
- Chhikara, P.; Tekchandani, R.; Kumar, N.; Tanwar, S. Federated learning-based aerial image segmentation for collision-free movement and landing. In Proceedings of the the 4th ACM MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond, Virtual, 29 October 2021; pp. 13–18. [Google Scholar]
- Lee, W. Federated reinforcement learning-based UAV swarm system for aerial remote sensing. Wirel. Commun. Mob. Comput. 2022, 2022, 4327380. [Google Scholar] [CrossRef]
- Cheng, G.; Xie, X.; Han, J.; Guo, L.; Xia, G.S. Remote sensing image scene classification meets deep learning: Challenges, methods, benchmarks, and opportunities. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3735–3756. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L. Artificial intelligence for remote sensing data analysis: A review of challenges and opportunities. IEEE Geosci. Remote Sens. Mag. 2022, 10, 270–294. [Google Scholar] [CrossRef]
- Geiß, C.; Pelizari, P.A.; Blickensdörfer, L.; Taubenböck, H. Virtual support vector machines with self-learning strategy for classification of multispectral remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2019, 151, 42–58. [Google Scholar] [CrossRef]
- Wang, X.; Gao, X.; Zhang, Y.; Fei, X.; Chen, Z.; Wang, J.; Zhang, Y.; Lu, X.; Zhao, H. Land-cover classification of coastal wetlands using the RF algorithm for Worldview-2 and Landsat 8 images. Remote Sens. 2019, 11, 1927. [Google Scholar] [CrossRef]
- Zhang, W.; Tang, P.; Zhao, L. Remote sensing image scene classification using CNN-CapsNet. Remote Sens. 2019, 11, 494. [Google Scholar] [CrossRef]
- Li, Y.; Chen, R.; Zhang, Y.; Zhang, M.; Chen, L. Multi-label remote sensing image scene classification by combining a convolutional neural network and a graph neural network. Remote Sens. 2020, 12, 4003. [Google Scholar] [CrossRef]
- Tang, X.; Ma, Q.; Zhang, X.; Liu, F.; Ma, J.; Jiao, L. Attention consistent network for remote sensing scene classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2030–2045. [Google Scholar] [CrossRef]
- Chen, J.; Guo, Y.; Zhu, J.; Sun, G.; Qin, D.; Deng, M.; Liu, H. Improving Few-Shot Remote Sensing Scene Classification with Class Name Semantics. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Yeom, S.; Giacomelli, I.; Fredrikson, M.; Jha, S. Privacy Risk in Machine Learning: Analyzing the Connection to Overfitting. In Proceedings of the 2018 IEEE 31st Computer Security Foundations Symposium (CSF), Oxford, UK, 9–12 July 2018; pp. 268–282. [Google Scholar]
- Song, L.; Mittal, P. Systematic evaluation of privacy risks of machine learning models. In Proceedings of the 30th USENIX Security Symposium (USENIX Security 21), Virtual, 11–13 August 2021; pp. 2615–2632. [Google Scholar]
- Carlini, N.; Chien, S.; Nasr, M.; Song, S.; Terzis, A.; Tramer, F. Membership inference attacks from first principles. In Proceedings of the 2022 IEEE Symposium on Security and Privacy (SP), IEEE, Santa Clara, CA, USA, 23–25 May 2022; pp. 1897–1914. [Google Scholar]
- Liu, P.; Xu, X.; Wang, W. Threats, attacks and defenses to federated learning: Issues, taxonomy and perspectives. Cybersecurity 2022, 5, 4. [Google Scholar]
- Kaya, Y.; Dumitras, T. When does data augmentation help with membership inference attacks? In Proceedings of the International Conference on Machine Learning, PMLR, Virtual, 18–24 July 2021; pp. 5345–5355. [Google Scholar]
- Hinton, G.; Vinyals, O.; Dean, J. Distilling the knowledge in a neural network. arXiv 2015, arXiv:1503.02531. [Google Scholar]
- Zheng, J.; Cao, Y.; Wang, H. Resisting membership inference attacks through knowledge distillation. Neurocomputing 2021, 452, 114–126. [Google Scholar] [CrossRef]
- Cynthia, D. Differential privacy. In Automata, Languages and Programming; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1–12. [Google Scholar]
- McMahan, B.; Moore, E.; Ramage, D.; Hampson, S.; Aguera y Arcas, B. Communication-efficient learning of deep networks from decentralized data. In Proceedings of the Artificial Intelligence and Statistics, PMLR, Fort Lauderdale, FL, USA, 20–22 April 2017; pp. 1273–1282. [Google Scholar]
- Wang, N.; Xiao, X.; Yang, Y.; Zhao, J.; Hui, S.C.; Shin, H.; Shin, J.; Yu, G. Collecting and Analyzing Multidimensional Data with Local Differential Privacy. arXiv 2019, arXiv:1907.00782. [Google Scholar]
- Dwork, C.; Roth, A. The algorithmic foundations of differential privacy. Found. Trends Theor. Comput. Sci. 2014, 9, 211–407. [Google Scholar] [CrossRef]
- Dwork, C.; McSherry, F.; Nissim, K.; Smith, A. Calibrating noise to sensitivity in private data analysis. In Proceedings of the Theory of Cryptography Conference, New York, NY, USA, 4–7 March 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 265–284. [Google Scholar]
- Duchi, J.C.; Jordan, M.I.; Wainwright, M.J. Minimax optimal procedures for locally private estimation. J. Am. Stat. Assoc. 2018, 113, 182–201. [Google Scholar] [CrossRef]
- Sablayrolles, A.; Douze, M.; Schmid, C.; Ollivier, Y.; Jégou, H. White-box vs black-box: Bayes optimal strategies for membership inference. In Proceedings of the International Conference on Machine Learning, PMLR, Long Beach, CA, USA, 9–15 June 2019; pp. 5558–5567. [Google Scholar]
- Chen, D.; Yu, N.; Fritz, M. Relaxloss: Defending membership inference attacks without losing utility. arXiv 2022, arXiv:2207.05801. [Google Scholar]
- Robbins, H.; Monro, S. A stochastic approximation method. Ann. Math. Stat. 1951, 22, 400–407. [Google Scholar] [CrossRef]
- McSherry, F.; Talwar, K. Mechanism design via differential privacy. In Proceedings of the 48th Annual IEEE Symposium on Foundations of Computer Science (FOCS’07), IEEE, Washington, DC, USA, 21–23 October 2007; pp. 94–103. [Google Scholar]
- Helber, P.; Bischke, B.; Dengel, A.; Borth, D. Eurosat: A novel dataset and deep learning benchmark for land use and land cover classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2217–2226. [Google Scholar] [CrossRef]
- Cheng, G.; Han, J.; Lu, X. Remote sensing image scene classification: Benchmark and state of the art. Proc. IEEE 2017, 105, 1865–1883. [Google Scholar] [CrossRef]
- Xiao, H.; Rasul, K.; Vollgraf, R. Fashion-mnist: A novel image dataset for benchmarking machine learning algorithms. arXiv 2017, arXiv:1708.07747. [Google Scholar]
- Krizhevsky, A. Learning Multiple Layers of Features from Tiny Images. Master’s Thesis, University of Toronto, Toronto, ON, Canada, 2009. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Geyer, R.C.; Klein, T.; Nabi, M. Differentially private federated learning: A client level perspective. arXiv 2017, arXiv:1712.07557. [Google Scholar]
- Bhowmick, A.; Duchi, J.; Freudiger, J.; Kapoor, G.; Rogers, R. Protection against reconstruction and its applications in private federated learning. arXiv 2018, arXiv:1812.00984. [Google Scholar]
Figure 1.
Different LDP mechanisms’ worst-case noise variances for one-dimensional numeric data versus privacy budget .
Figure 1.
Different LDP mechanisms’ worst-case noise variances for one-dimensional numeric data versus privacy budget .

Figure 2.
Overview of the LDP-Fed.

Figure 3.
Private federated learning with LDP-Fed.

Figure 4.
EuroSAT dataset sample image presentations in ten categories. (a) AnnualCrop. (b) Forest. (c) Highway. (d) Industrial. (e) HerbaceousVegetation. (f) Pasture. (g) PermanentCrop. (h) Residential. (i) River. (j) SeaLake.
Figure 4.
EuroSAT dataset sample image presentations in ten categories. (a) AnnualCrop. (b) Forest. (c) Highway. (d) Industrial. (e) HerbaceousVegetation. (f) Pasture. (g) PermanentCrop. (h) Residential. (i) River. (j) SeaLake.

Figure 5.
Presentation of a portion of the NWPU-RESISC45 sample, it contains 45 categories of remote sensing scene images. (a) Airport. (b) Airplane. (c) Basketball. (d) Beach. (e) Bridge. (f) Church. (g) Cloud. (h) Desert. (i) Island. (j) Lake.
Figure 5.
Presentation of a portion of the NWPU-RESISC45 sample, it contains 45 categories of remote sensing scene images. (a) Airport. (b) Airplane. (c) Basketball. (d) Beach. (e) Bridge. (f) Church. (g) Cloud. (h) Desert. (i) Island. (j) Lake.

Figure 6.
Compare the effect of LDP to the local and global models’ accuracy on four different datasets.
Figure 6.
Compare the effect of LDP to the local and global models’ accuracy on four different datasets.

Figure 7.
Impact of client number n on the training accuracy in four different datasets.

Figure 8.
Impact of privacy budget on training accuracy in four different datasets.

Figure 9.
Analyze the relationship between the model accuracy and communication rounds.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison summary.
| Function/Method | [16] | [20] | [22] | [24] | LDP-Fed |
|---|---|---|---|---|---|
| Data Type | Arbitrary | Image | Arbitrary | Arbitrary | Arbitrary |
| Federated Learning | ✕ | ✓ | ✓ | ✓ | ✓ |
| Defend against white-box MIA | ✕ | ✕ | ✓ | ✓ | ✓ |
| Defend against black-box MIA | ✓ | ✓ | ✓ | ✓ | ✓ |
| Defense Mechanism | Confidence Masking | Mixup Regularization | Knowledge Distillation | DP-SGD | LDP |
| Model Performance | High | High | High | Low | High |
| Efficiency of Training | High | Low | Low | High | High |
Table 2.
The size of the dataset used to train and test the LDP-Fed classification models and the architecture of the models.
Table 2.
The size of the dataset used to train and test the LDP-Fed classification models and the architecture of the models.
| Dataset | Architecture | Training Size | Testing Size |
|---|---|---|---|
| EuroSAT | Convolutional Neural Network | 15,000 | 12,000 |
| NWPU-RESISC45 | Convolutional Neural Network(VGG) | 20,000 | 10,000 |
| Fashion-MNIST | Fully Connected Network | 60,000 | 10,000 |
| CIFAR10 | Convolutional Neural Network(Alexnet) | 50,000 | 10,000 |
Table 3.
Datasets sizes of the target and attack models in FL experiments.
| Datesets | Client’s Datasets Size | Attack Model Datasets Size | ||||
|---|---|---|---|---|---|---|
| Training | Testing | Training Member | Training Non-Member | Testing Member | Testing Non-Member | |
| EuroSAT | 5000 | 5000 | 2500 | 2500 | 2500 | 2500 |
| NWPU-RESISC45 | 10,000 | 10,000 | 5000 | 5000 | 5000 | 5000 |
| Fashion-MNIST | 5000 | 10,000 | 2500 | 2500 | 2500 | 2500 |
| CIFAR10 | 15,000 | 10,000 | 10,000 | 5000 | 5000 | 5000 |
Table 4.
Performance of applying LDP in FL against white-box MIA on EuroSAT, CIFAR10, NWPU-RESISC45, and Fashion-MNIST.
Table 4.
Performance of applying LDP in FL against white-box MIA on EuroSAT, CIFAR10, NWPU-RESISC45, and Fashion-MNIST.
| Defense | Dateset | Privacy Budget | Acc. | Global Att. | Local Att. |
|---|---|---|---|---|---|
| No Defense | EuroSAT | - | 89.2% | 46.4% | 25.8% |
| CIFAR10 | - | 62.1% | 44.6% | 26.3% | |
| NWPU-RESISC45 | - | 83.5% | 46.2% | 28.4% | |
| Fashion-MNIST | - | 86.5% | 24.5% | 12.5% | |
| Defense with LDP | EuroSAT | 3.0 | 82.5% | 13.8% | 17.6% |
| CIFAR10 | 2.0 | 59.6% | 12.2% | 18.4% | |
| NWPU-RESISC45 | 5.0 | 77.9% | 10.6% | 18.6% | |
| Fashion-MNIST | 2.0 | 83.6% | 4.6% | 8.2% |
Table 5.
Compare the performance of different defense mechanisms against a white-box MIA in FL using Alexnet on CIFAR10.
Table 5.
Compare the performance of different defense mechanisms against a white-box MIA in FL using Alexnet on CIFAR10.
| Defense Method | Privacy Budget | Model Acc. | Global Att. | Local Att. |
|---|---|---|---|---|
| No Defense | - | 62.1% | 44.6% | 26.3% |
| LDP-Fed | 2.0 | 59.6% | 12.2% | 18.4% |
| DP-SGD | 2.0 | 42.3% | 5.8% | 4.2% |
| 8.6 | 54.6% | 13.6% | 12.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, Z.; Ma, X.; Ma, J. Local Differential Privacy Based Membership-Privacy-Preserving Federated Learning for Deep-Learning-Driven Remote Sensing. Remote Sens. 2023, 15, 5050. https://doi.org/10.3390/rs15205050
AMA Style
Zhang Z, Ma X, Ma J. Local Differential Privacy Based Membership-Privacy-Preserving Federated Learning for Deep-Learning-Driven Remote Sensing. Remote Sensing. 2023; 15(20):5050. https://doi.org/10.3390/rs15205050
Chicago/Turabian StyleZhang, Zheng, Xindi Ma, and Jianfeng Ma. 2023. "Local Differential Privacy Based Membership-Privacy-Preserving Federated Learning for Deep-Learning-Driven Remote Sensing" Remote Sensing 15, no. 20: 5050. https://doi.org/10.3390/rs15205050
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.