
A Fast Matching Method for the SAR Images with Large Viewing Angles Based on Inertial Navigation Information and Neighborhood Structure Consensus

Abstract
:
1. Introduction
- (1)
- In terms of extracting image feature points, different from the traditional SAR image registration algorithm, the traditional SAR image registration method is based on the SIFT algorithm, which inevitably regards some noise spots as feature points to be matched, and the matching process depends on the similarity between the registered images.
- (2)
- The way of extracting feature points in this paper will lead to the problem of less information on matching points. To solve this problem, a matching method based on the consistency of inertial navigation information and target neighborhood structure is proposed. Through this method, accurate matching is completed and the matching time is reduced.
2. Methods
- (1)
- Image preprocessing and target detection from different perspectivesSAR images are preprocessed, and then the targets are preliminarily detected by the maximum connected domain algorithm. The feature points of the detected targets are expressed by the connected domain centroid, and then strong scattering region and target feature points are separated by the K-means clustering algorithm.
- (2)
- Transformation relationship solution based on inertial informationSAR imaging is performed at different viewing angles in the same scene, and inertial navigation information of the aerial carriers at different viewing angles is obtained. Based on the inertial navigation information and combined with the single-view SAR location model, the preliminary transformation relationship between the SAR images at different viewing angles is obtained through the coordinate transformation among a geodetic coordinate system, ENU (East-North-Up) coordinate system and geodetic rectangular coordinate system.
- (3)
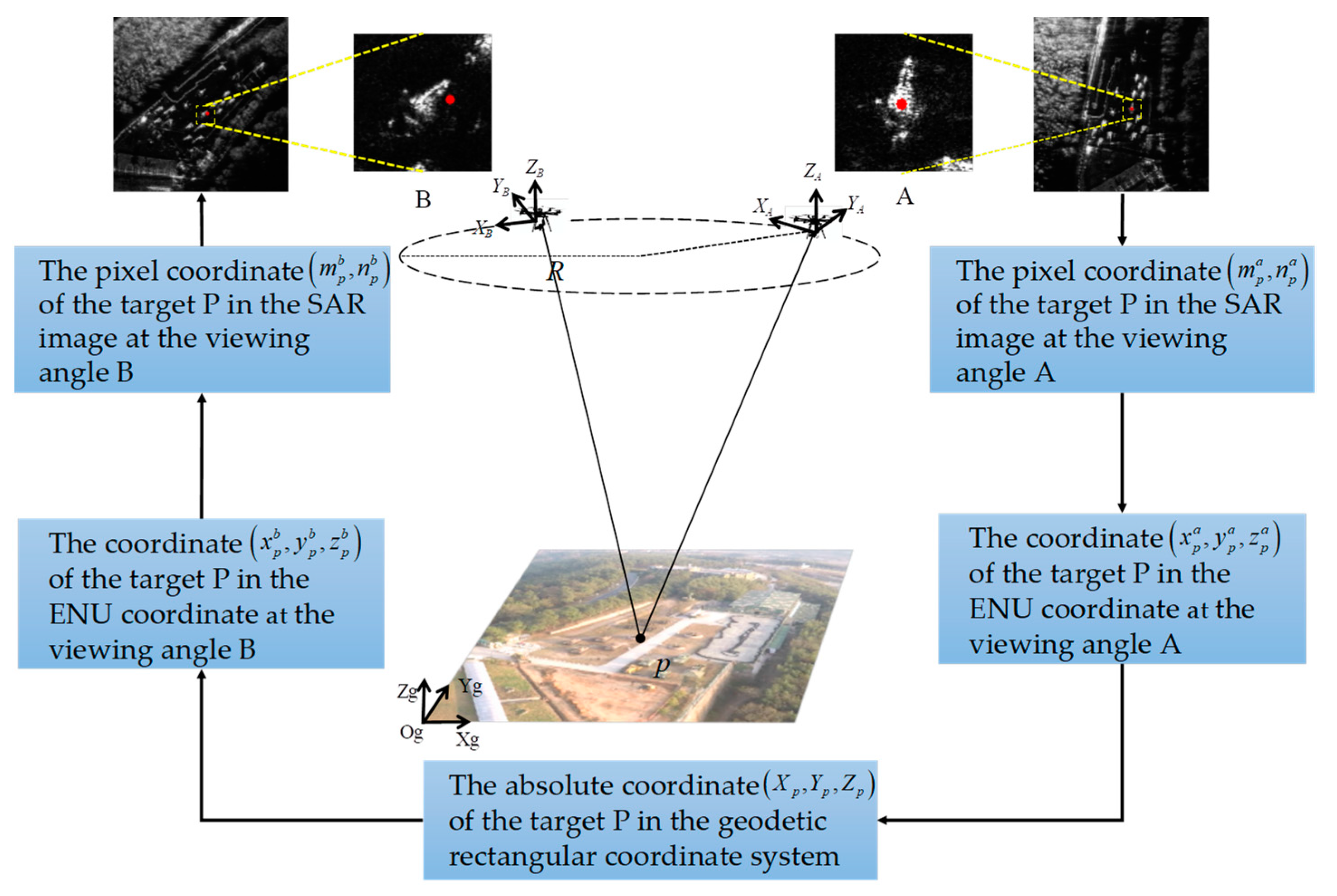
- Structural similarity matchingAccording to the transformation relationship, the corresponding coordinates of the feature points of the A-view SAR image on the B-view SAR image is calculated, and the matching points corresponding to the feature points are screened by the nearest neighbor algorithm. The nearest neighbor algorithm and brute force matching algorithm are used to match with the feature points within the neighborhood of matching points, then the matching similarity score is calculated through the neighborhood structure consensus, finally the correct matching is output.
2.1. Target Detection and Extraction
2.1.1. Preprocessing of SAR Images
2.1.2. Target Detection and Feature Extraction
- (1)
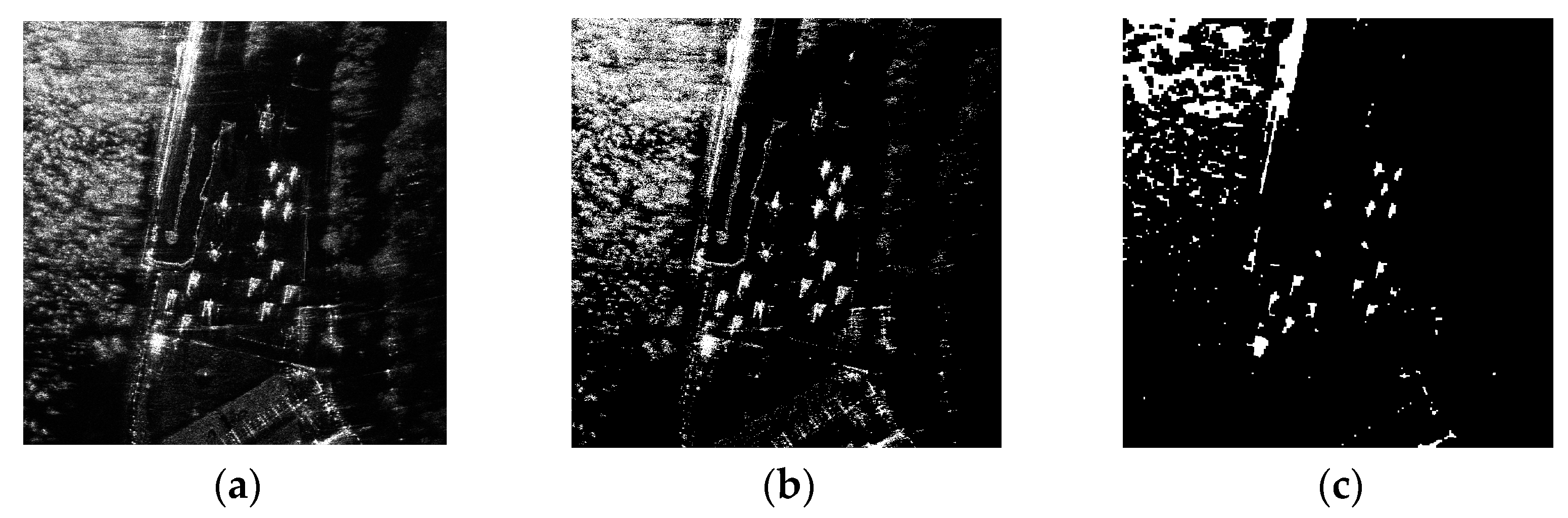
- Elimination of isolated misjudgment pointsSAR is affected by noise interference in the imaging process, which brings some isolated misjudgment points into the image after preprocessing. In fact, the target occupies a certain area in the image, and it does not exist as an isolated point in the image. Therefore, the maximum connected domain algorithm can be adopted to eliminate the isolated misjudgment points. The connected domain refers to an area composed of adjacent pixels. In the field of computer vision, it is a commonly used image processing technology, which is used to separate different regions in the image, to realize image segmentation, target detection, and other applications. The maximal general domain algorithm is an image processing algorithm based on the connected domain. By setting the maximal general domain pixel threshold, the connected domain greater than the set threshold is extracted. As shown in Figure 4a, isolated misjudgment points are successfully eliminated to obtain some regions with a certain area.
- (2)
- False alarm suppression in strong scattering regionTarget region and strong scattering regions have certain areas in the SAR images, so they can hardly be distinguished using the maximum connected domain method. In practice, there is an obvious regional division between the target region and the strong scattering region dominated by woods. By calculating the connected domain centroid (as shown in Figure 4b, the centroid points of strong scattering region are concentrated and dense), the K-means clustering algorithm can be adopted to separate the target from the strong scattering region to solve this problem [30]. Clustering is a process of classifying and organizing data members that are similar in some aspects. K-means clustering is the most famous partition clustering algorithm. Because of its simplicity and efficiency, it has become the most widely used of all clustering algorithms. Given a set of data points and the required number of clusters , is specified by the user, and the K-means algorithm repeatedly divides the data into clusters according to the distance function. As shown in Figure 4c, the target centroid is obtained after suppressing the strong scattering region, and target detection and feature extraction are completed.
2.2. Coordinate Transformation Based on Inertial Navigation Information
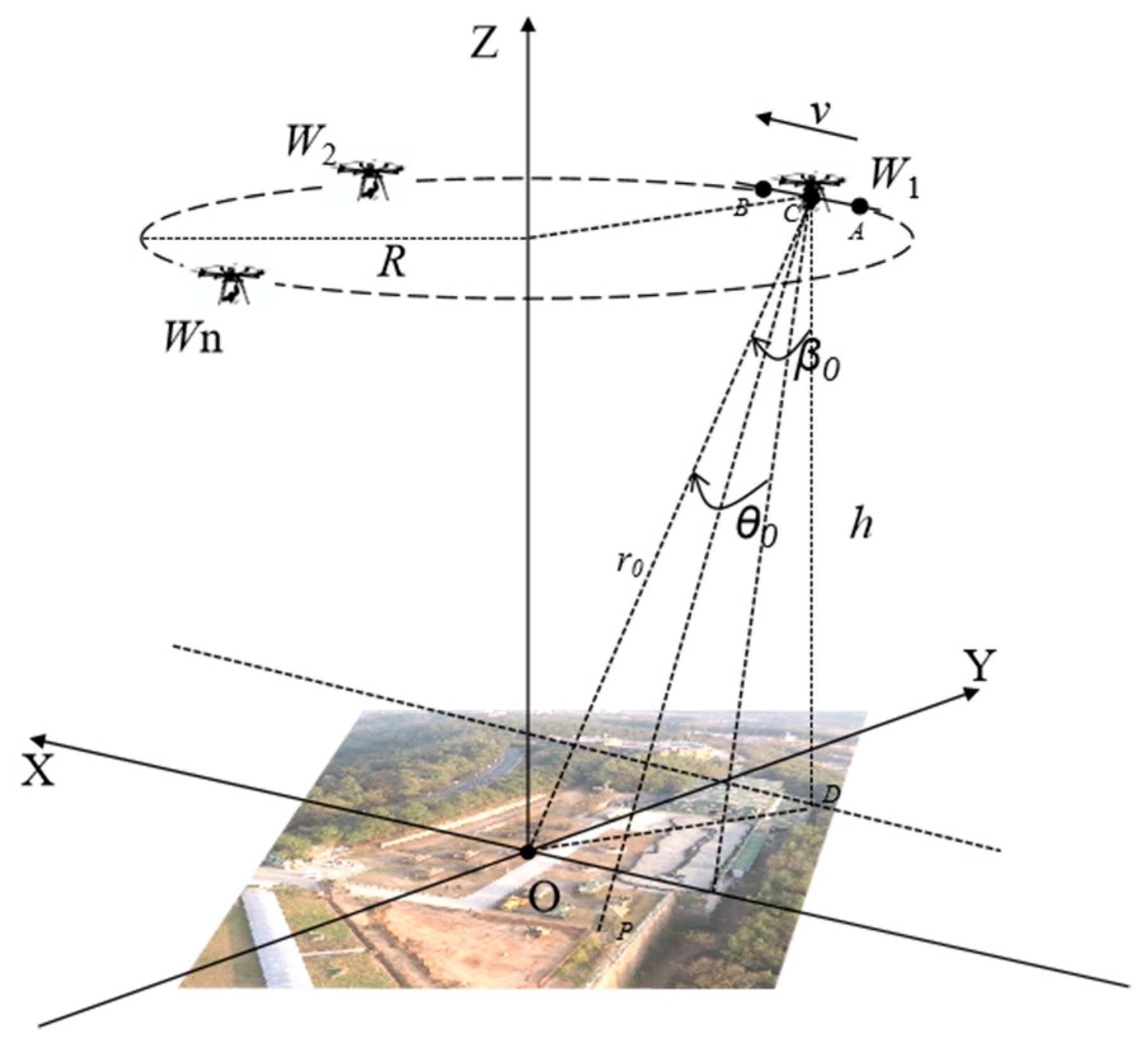
2.2.1. Single-View Location Model
2.2.2. Coordinate System Transformation
2.3. Matching Algorithm Based on Structural Similarity
- (1)
- Distance similarityThe distance between the target and the reference point is constant in the process of changing the viewing angle. But in the actual matching process, the distance cannot be exactly the same. Define as the distance between two points of , . As shown in Figure 8, and are not exactly the same, but the difference between the lengths of the corresponding edges should be approximately the same. The difference between and is approximately the same as that between and . Therefore, the distance similarity function is defined as follows:where stands for weight.
- (2)
- Angle similarityIn the process of changing the viewing angle, the angle between the target and any two reference points is constant. But in the actual matching process, the angles cannot be exactly the same. is defined as the angle formed by as the vertex in , , . As shown in Figure 8, and are not exactly the same, so the ratio is used to form the angle consistency, and the angle similarity function is defined as follows:where represents the number of combinations of two elements taken from different elements and stands for weight.
- (3)
- Vector similarityAs shown in Figure 8, is a vector pointing from to , and is a vector pointing from to . For correctly matched points, the displacement vector between any two points in its neighborhood should be very close. For mismatched points, the displacement vectors of points in the neighborhood and between points may be different. Therefore, the product of the length ratio and the angle between two displacement vectors is used to describe the consistency between the two vectors, and the vector consistency function is defined as follows:where stands for weight.
3. Experimental Verification
3.1. Data Description and Parameter Settings
3.2. Comparative Experiment Results and Analysis
4. Discussion
5. Conclusions
- (1)
- The ININSC algorithm has the same registration accuracy as the traditional SAR image registration algorithms and can solve the problem of SAR image registration at large viewing angles that the traditional algorithm cannot tackle. It has stronger robustness.
- (2)
- The ININSC algorithm is far less time-consuming than traditional SAR image registration algorithms.
Author Contributions
Funding
Conflicts of Interest
References
- Fan, W.; Zhang, M.; Li, J.; Wei, P. Modified Range-Doppler Algorithm for High Squint SAR Echo Processing. IEEE Geosci. Remote Sens. Lett. 2019, 16, 422–426. [Google Scholar] [CrossRef]
- Salerno, E. Using Low-Resolution SAR Scattering Features for Ship Classification. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–4. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, G.; Zhou, H.; Wang, S. Multiscale Ship Detection Method in SAR Images Based on Information Compensation and Feature Enhancement. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Ansari, H.; De Zan, F.; Parizzi, A.; Eineder, M.; Goel, K.; Adam, N. Measuring 3-D Surface Motion with Future SAR Systems Based on Reflector Antennae. IEEE Geosci. Remote Sens. Lett. 2016, 13, 272–276. [Google Scholar] [CrossRef]
- Yuan, M.; Zhang, Q.; Li, Y.; Yan, Y.; Zhu, Y. A Suspicious Multi-Object Detection and Recognition Method for Millimeter Wave Sar Security Inspection Images Based on Multi-Path Extraction Network. Remote Sens. 2021, 13, 4978. [Google Scholar] [CrossRef]
- Lavalle, M.; Seker, I.; Ragan, J.; Loria, E.; Ahmed, R.; Hawkins, B.P.; Prager, S.; Clark, D.; Beauchamp, R.; Haynes, M.; et al. Distributed Aperture Radar Tomographic Sensors (DARTS) to Map Surface Topography and Vegetation Structure. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1090–1093. [Google Scholar]
- Fan, Y.; Chen, X.; Wei, Y.; Wen, Y.; Zeng, T.; DIng, Z. The Distributed SAR Reconstruction Method for Line Target. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 2921–2924. [Google Scholar] [CrossRef]
- Markiewicz, J.; Abratkiewicz, K.; Gromek, A.; Ostrowski, W.; Samczyński, P.; Gromek, D. Geometrical Matching of SAR and Optical Images Utilizing ASIFT Features for SAR-Based Navigation Aided Systems. Sensors 2019, 19, 5500. [Google Scholar] [CrossRef]
- Liu, X.; Li, J.B.; Pan, J.S.; Wang, S.; Lv, X.; Cui, S. Image-Matching Framework Based on Region Partitioning for Target Image Location. Telecommun. Syst. 2020, 74, 269–286. [Google Scholar] [CrossRef]
- Suri, S.; Reinartz, P. Mutual-Information-Based Registration of TerraSAR-X and Ikonos Imagery in Urban Areas. IEEE Trans. Geosci. Remote Sens. 2010, 48, 939–949. [Google Scholar] [CrossRef]
- Yoo, J.C.; Han, T.H. Fast Normalized Cross-Correlation. Circuits Syst. Signal Process. 2009, 28, 819–843. [Google Scholar] [CrossRef]
- Wang, F.; Vemuri, B.C. Non-Rigid Multi-Modal Image Registration Using Cross-Cumulative Residual Entropy. Int. J. Comput. Vis. 2007, 74, 201–215. [Google Scholar] [CrossRef]
- Paul, S.; Pati, U.C. SAR Image Registration Using an Improved SAR-SIFT Algorithm and Delaunay-Triangulation-Based Local Matching. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 295–2966. [Google Scholar] [CrossRef]
- Hughes, R.A. Geoscience Data and Derived Spatial Information: Societal Impacts and Benefits, and Relevance to Geological Surveys and Agencies. Spec. Pap. Geol. Soc. Am. 2011, 482, 35–40. [Google Scholar] [CrossRef]
- Fan, B.; Huo, C.; Pan, C.; Kong, Q. Registration of Optical and Sar Satellite Images by Exploring the Spatial Relationship of the Improved SIFT. IEEE Geosci. Remote Sens. Lett. 2013, 10, 657–661. [Google Scholar] [CrossRef]
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. SAR-SIFT: A SIFT-like Algorithm for SAR Images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 453–466. [Google Scholar] [CrossRef]
- Ma, W.; Wen, Z.; Wu, Y.; Jiao, L.; Gong, M.; Zheng, Y.; Liu, L. Remote Sensing Image Registration with Modified Sift and Enhanced Feature Matching. IEEE Geosci. Remote Sens. Lett. 2017, 14, 3–7. [Google Scholar] [CrossRef]
- Eltanany, A.S.; Amein, A.S.; Elwan, M.S. A Modified Corner Detector for SAR Images Registration. Int. J. Eng. Res. Afr. 2021, 53, 123–156. [Google Scholar] [CrossRef]
- Elwan, M.; Amein, A.S.; Mousa, A.; Ahmed, A.M.; Bouallegue, B.; Eltanany, A.S. SAR Image Matching Based on Local Feature Detection and Description Using Convolutional Neural Network. Secur. Commun. Netw. 2022, 2022, 5669069. [Google Scholar] [CrossRef]
- Yao, G.; Man, X.; Zhang, L.; Deng, K.; Zhuang, H.; Zheng, G. Registrating Oblique SAR Images Based on Complementary Integrated Filtering and Multilevel Matching. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3445–3457. [Google Scholar] [CrossRef]
- Xiang, Y.; Jiao, N.; Liu, R.; Wang, F.; You, H.; Qiu, X.; Fu, K. A Geometry-Aware Registration Algorithm for Multiview High-Resolution SAR Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–18. [Google Scholar] [CrossRef]
- Xiang, Y.; Peng, L.; Wang, F.; Qiu, X. Fast Registration of Multiview Slant-Range SAR Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Oveis, A.H.; Giusti, E.; Ghio, S.; Martorella, M. A Survey on the Applications of Convolutional Neural Networks for Synthetic Aperture Radar: Recent Advances. IEEE Aerosp. Electron. Syst. Mag. 2022, 37, 18–42. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, Y.; Cui, Q.; Zhou, Q.; Ma, L. Unsupervised SAR and Optical Image Matching Using Siamese Domain Adaptation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Du, W.L.; Zhou, Y.; Zhao, J.; Tian, X.; Yang, Z.; Bian, F. Exploring the Potential of Unsupervised Image Synthesis for SAR-Optical Image Matching. IEEE Access 2021, 9, 71022–71033. [Google Scholar] [CrossRef]
- Bozeman, E.; Nguyen, M.; Alam, M.; Onners, J. Inertial Navigation Compensation with Reinforcement Learning. In Proceedings of the 2022 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Avignon, France, 8–11 May 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Jiang, X.; Xia, Y.; Zhang, X.P.; Ma, J. Robust Image Matching via Local Graph Structure Consensus. Pattern Recognit. 2022, 126, 108588. [Google Scholar] [CrossRef]
- Ma, J.; Zhao, J.; Jiang, J.; Zhou, H.; Guo, X. Locality Preserving Matching. Int. J. Comput. Vis. 2019, 127, 512–531. [Google Scholar] [CrossRef]
- AlSaeed, D.H.; Bouridane, A.; ElZaart, A.; Sammouda, R. Two Modified Otsu Image Segmentation Methods Based on Lognormal and Gamma Distribution Models. In Proceedings of the 2012 International Conference on Information Technology and e-Services, Sousse, Tunisia, 24–26 March 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Venkatachalam, K.; Reddy, V.P.; Amudhan, M.; Raguraman, A.; Mohan, E. An Implementation of K-Means Clustering for Efficient Image Segmentation. In Proceedings of the 2021 10th IEEE International Conference on Communication Systems and Network Technologies (CSNT), Bhopal, India, 18–19 June 2021; pp. 224–229. [Google Scholar] [CrossRef]
- Zhao, W.; Zhou, L.; Song, G. A Study on Alignment of Analytic Space Stable Inertial Navigation System. In Proceedings of the 2019 26th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, Russia, 27–29 May 2019; pp. 6–11. [Google Scholar] [CrossRef]
- Lu, X.; Du, S. Nctr: Neighborhood Consensus Transformer for Feature Matching. In Proceedings of the 2022 IEEE International Conference on Image Processing (ICIP), Bordeaux, France, 16–19 October 2022; pp. 2726–2730. [Google Scholar] [CrossRef]
- Liu, H.; Yan, S. Common Visual Pattern Discovery via Spatially Coherent Correspondences. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1609–1616. [Google Scholar] [CrossRef]
- Jiang, B.; Sun, P.; Zhang, Z.; Tang, J.; Luo, B. GAMnet: Robust Feature Matching via Graph Adversarial-Matching Network. In Proceedings of the 29th ACM International Conference on Multimedia, Chengdu, China, 20–24 October 2021; pp. 5419–5426. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, D.; Mao, X.; Zhang, G.; Leung, H. Multirotor UAV-Borne Repeat-Pass CSM-VideoSAR. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2601–2605. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | Value |
|---|---|
| Bandwidth/MHz | 1800 |
| Carrier frequency/GHz | 9.7 |
| Flight speed/(m/s) | 5 |
| Average power/W | 2 |
| Sampling rate/MHz | 100 |
| Operating range/km | 2 |
| Method | 0°, 30.6° Image Groups | 30.6°, 61.2° Image Groups | 0°, 61.2° Image Groups | ||||||
|---|---|---|---|---|---|---|---|---|---|
| RMSE | Time/s | RMSE | Time/s | RMSE | Time/s | ||||
| SAR-SIFT | 100% | 0.383 | 158.76 | 100% | 0.395 | 155.37 | 0 | − | − |
| PSO-SIFT | 100% | 0.365 | 49.27 | 100% | 0.358 | 50.71 | 0 | − | − |
| ININSC | 100% | 0.374 | 5. 003 | 100% | 0.380 | 5.17 | 100% | 0.552 | 5.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, H.; Zhao, R.; Wu, C.; Wu, D.; Zhang, G.; Wang, L.; Zhu, D. A Fast Matching Method for the SAR Images with Large Viewing Angles Based on Inertial Navigation Information and Neighborhood Structure Consensus. Remote Sens. 2023, 15, 4084. https://doi.org/10.3390/rs15164084
Yan H, Zhao R, Wu C, Wu D, Zhang G, Wang L, Zhu D. A Fast Matching Method for the SAR Images with Large Viewing Angles Based on Inertial Navigation Information and Neighborhood Structure Consensus. Remote Sensing. 2023; 15(16):4084. https://doi.org/10.3390/rs15164084
Chicago/Turabian StyleYan, He, Rui Zhao, Chen Wu, Di Wu, Gong Zhang, Ling Wang, and Daiyin Zhu. 2023. "A Fast Matching Method for the SAR Images with Large Viewing Angles Based on Inertial Navigation Information and Neighborhood Structure Consensus" Remote Sensing 15, no. 16: 4084. https://doi.org/10.3390/rs15164084