
Discovering the Ancient Tomb under the Forest Using Machine Learning with Timing-Series Features of Sentinel Images: Taking Baling Mountain in Jingzhou as an Example

Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Material
3. Methods
3.1. Selecting the Sample Data of Ancient Tombs under the Forest
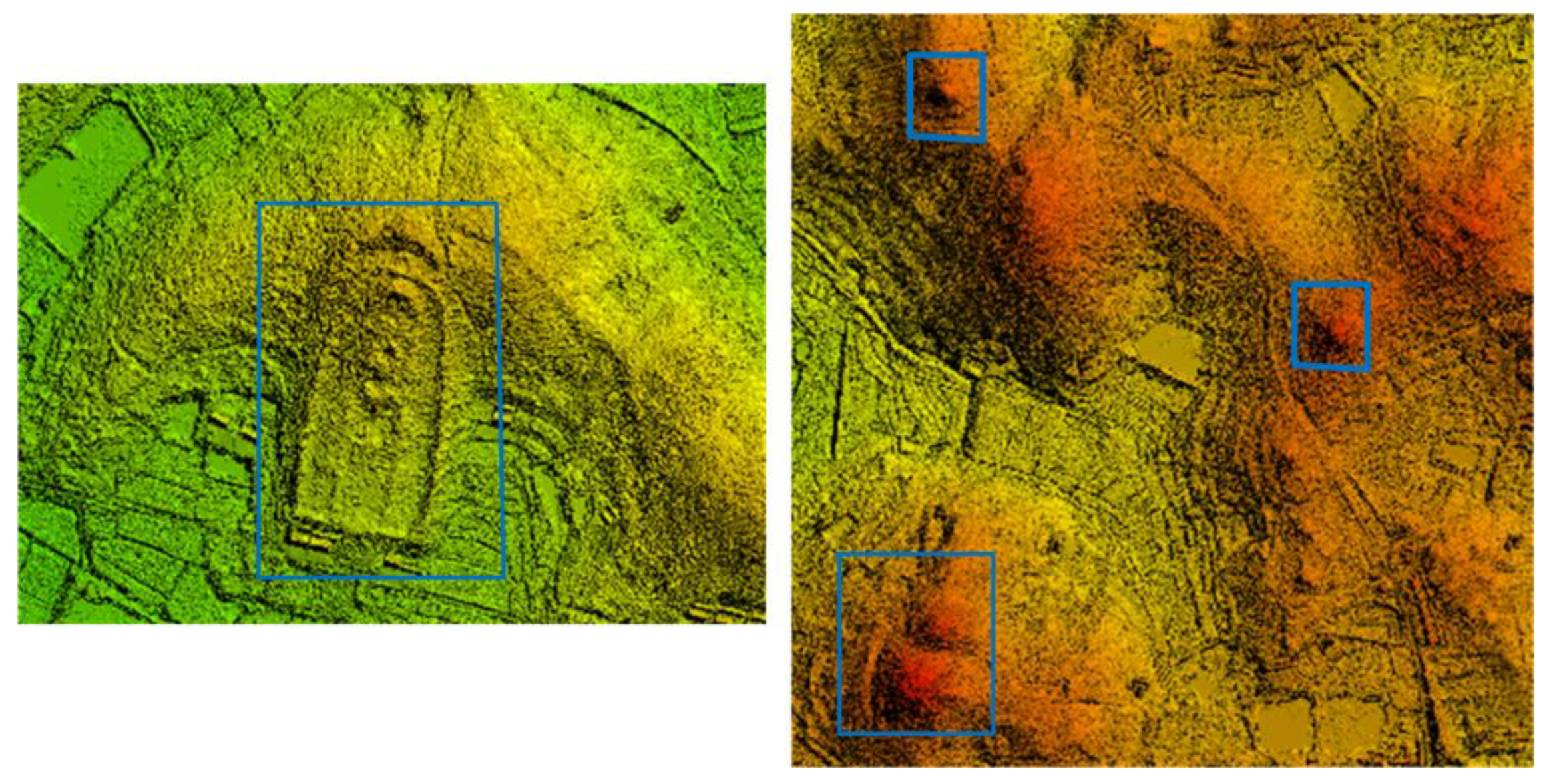
3.1.1. Highly Detailed DSM to Located Ancient Tombs
3.1.2. Combined with Images to Selecting the Ancient Tombs Area under the Forest
3.2. Selecting Features of Ancient Tombs under the Forest in Sentinel Image
3.2.1. Texture Features
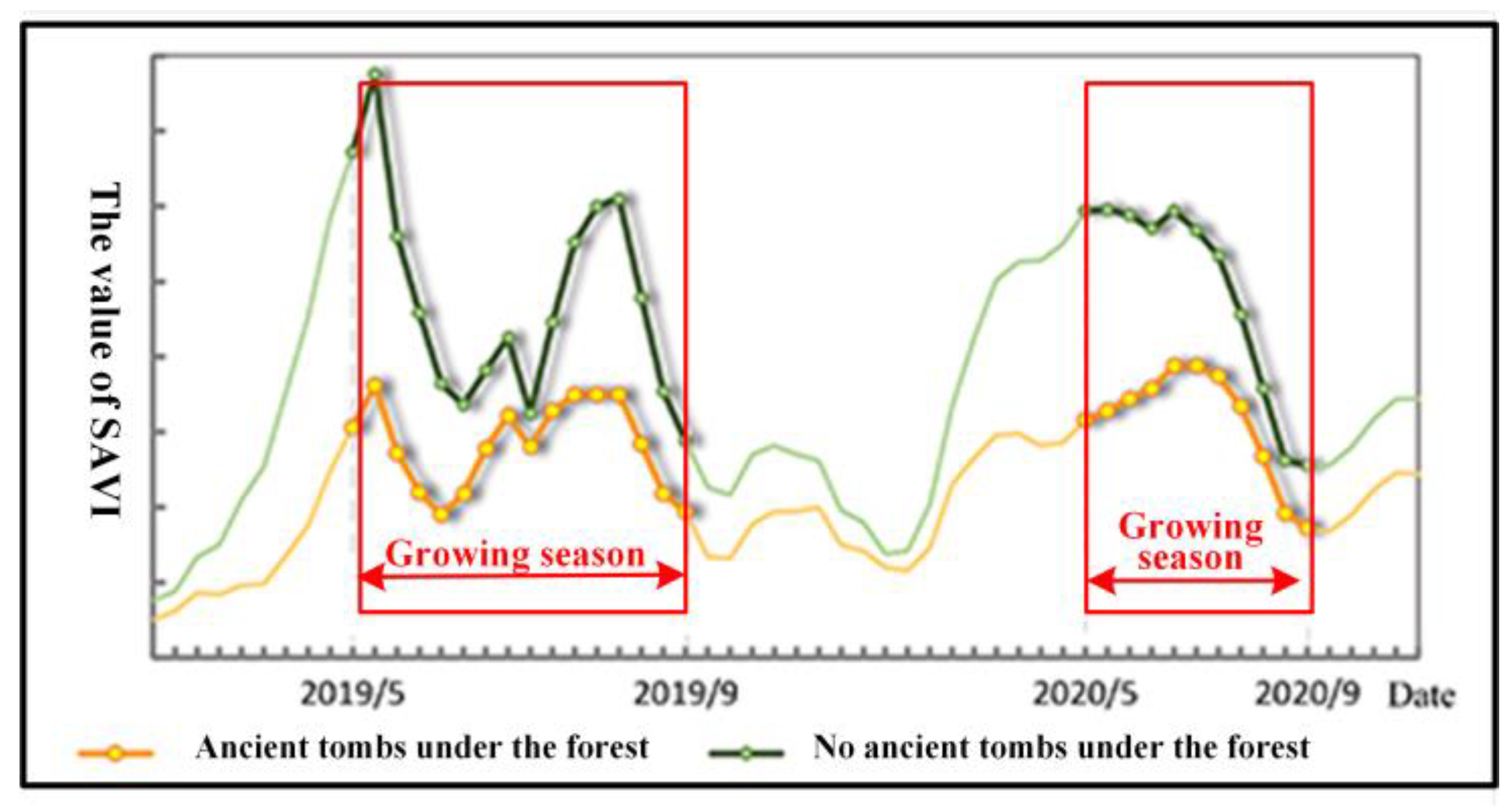
3.2.2. Timing-Series Features
- (1)
- Radar bands. The radar backscattering coefficient of Sentinel-1 is sensitive to the object’s dielectric properties. Generally speaking, the rougher the surface of the ground object, the stronger the backscattering, and the brighter the color tone reflected in the image. We examined the timing-series features of the VV band and VH band in Sentinel-1 from 2019 to 2020 to detect ground objects, which heavily relies on analyzing the radar backscattering coefficient features of various ground objects, such as Figure 11 and Figure 12.
3.3. Automatic Identification Algorithm Based on Random Forest
- Generation of training data. We first import the selected sample data into the GEE. Since the focus of this study is the detection of ancient tombs under the forest, only two categories are selected for the sample data, namely ancient tombs under the forest and non-ancient tombs under the forest, which are represented by “1” and “2”. However, to ensure the over-fitting problem of the model, 70% of them are randomly used as training data and the remaining 30% as verification data.
- Construction of band feature combinations. Following our exploration of the spectral features of ancient tombs beneath the forest, we primarily choose two band feature combinations to detect the influence of different band feature combinations on the results. There are fifteen bands: two radar bands for Sentinel-1; ten bands for Sentinel-2, except for the B1 and B9 bands; and three vegetation indices. We chose two band combinations, as shown in Table 5. Furthermore, in order to focus on the research object, we masked non-study objects.
- The training data are used to train the random forest classifier. The random forest classifier mainly uses the bootstrap resampling method to select n samples from all the sample data randomly. Each sample has K features, and each sample randomly selects k features (k ≤ K). It sets the best segmentation attribute as the node to establish the optimal decision tree model, combines multiple decision trees for prediction and obtains the optimal classification result through voting. One of the important parameters for random forest classifier detection is the number of decision trees, which determines the number of integrated decision trees. The larger the value, the better the model convergence, but the running time will increase. And when the number of trees is too large, it will be oversaturated. At the beginning of this study, 100 trees were selected to try because some studies have proved that this is the number that can obtain the best results. But in the end, the influence of the different number of decision trees on the experimental accuracy was calculated for this study, and it was found that the classification accuracy is the highest when the number of decision trees is 25.
- The target classification object will be obtained using the trained random forest classifier to iteratively classify the feature band combination.
- Independent 30% validation data are used to verify the classification accuracy. We mainly use the confusion matrix, including producer accuracy, user accuracy, overall accuracy (OA), and Kappa coefficient.In the formula, N is the total number of samples; n is the number of all categories; represents the number of samples divided into i categories; represents the number of samples belonging to category j.
- Ground validation. The overall performance of the automatic detection model is evaluated according to the number of correctly identified ancient tombs that are not involved in the calculation.
- The spatial distribution of ancient tombs under the forest identified by machine learning is relatively fragmented. Hence, we perform spatial filtering on the specified results to smooth the image and perform spatial connectivity processing to remove small patches.
| Algorithms 1. The implementation process and part of pseudocode |
| 1: Input: D – Sample data set, A - Band feature set 2: for b = 1 to B do 3: Dn=sub_D #Draw a bootstrap size n from the D. 4: Am=sub_A #Randomly select m from A. 5: splitpoint(Am) #Pick the best split-point from Am. 6: node=two_subnode return #Split the node into two daughter nodes. 7: end for 8: Output:{T1,T2,…,TB} #Make a Prediction at a new point x toregression. is the class prediction of the bth random-forest tree. |
4. Results
4.1. Algorithm Accuracy Verification
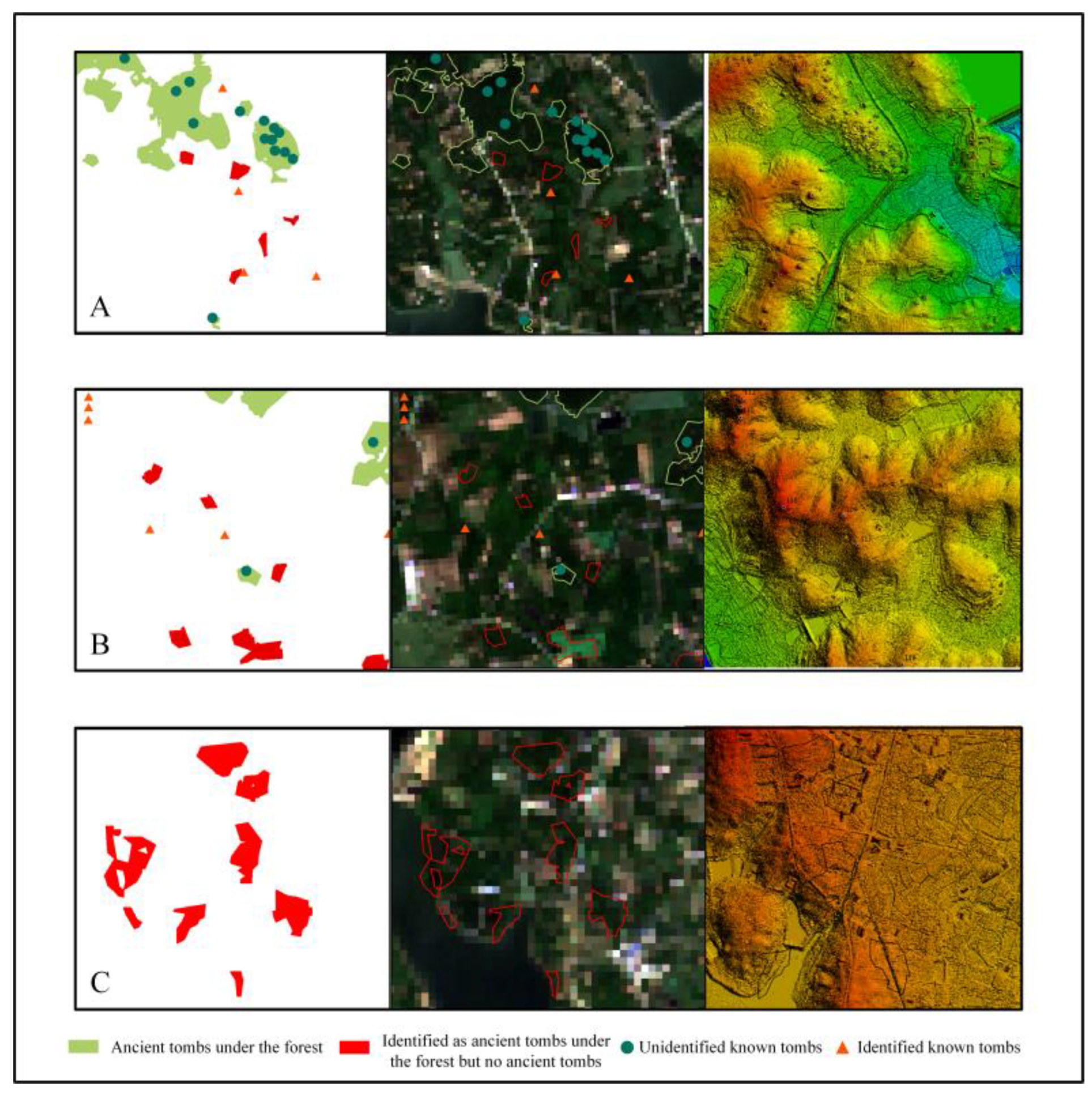
4.2. Ground Validation
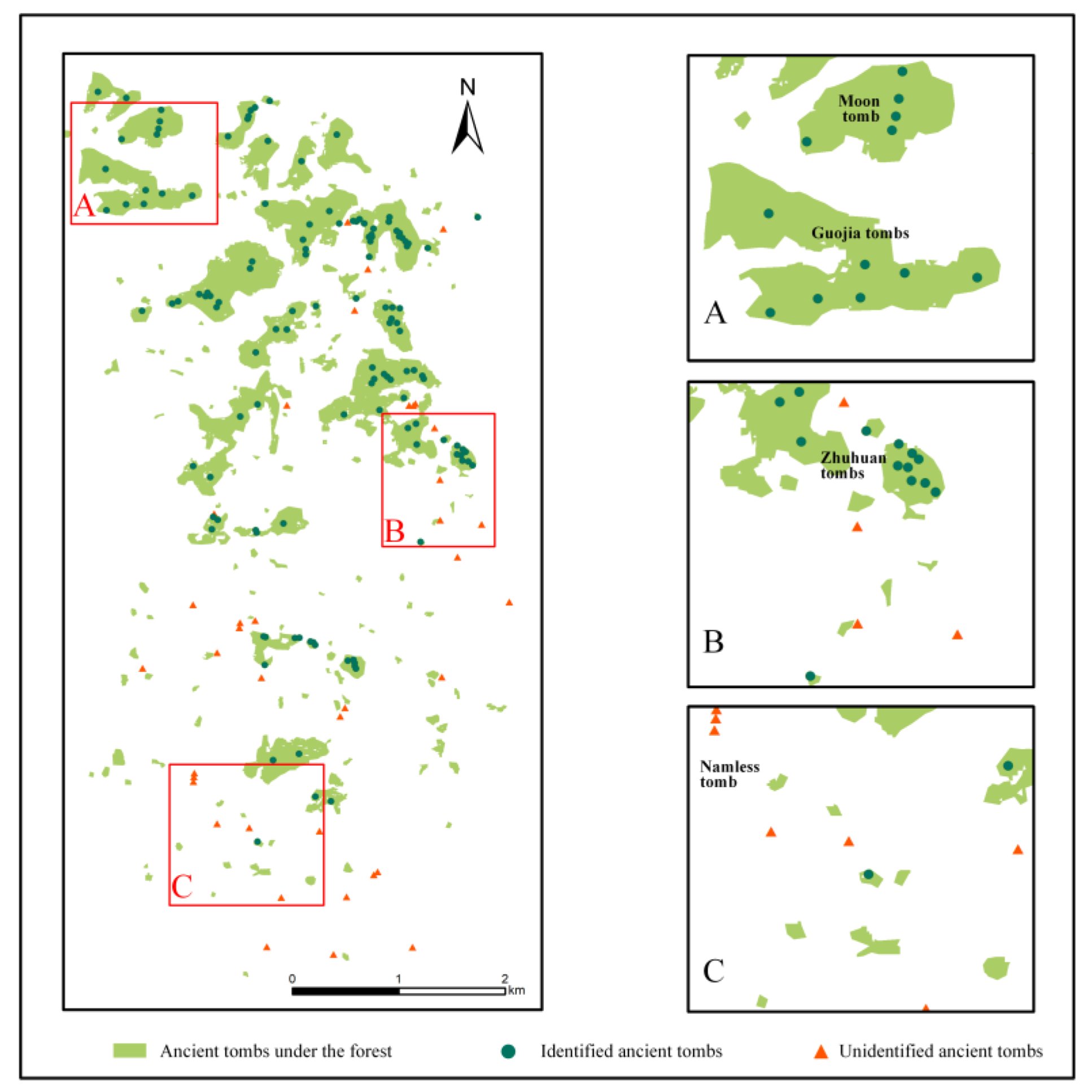
4.3. Spatial Mapping of Automatic Detection in Baling Mountain
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Crawford, O.G.S. Archaeology in the Field; Phoenix House: New York, NY, USA, 1960. [Google Scholar]
- Parcak, S.H. Satellite Remote Sensing for Archaeology; Routledge: London, UK, 2009. [Google Scholar]
- Fowler, M.J. Satellite remote sensing and archaeology: A comparative study of satellite imagery of the environs of Figsbury Ring, Wiltshire. Archaeol. Prospect. 2002, 9, 55–69. [Google Scholar] [CrossRef]
- Leisz, S.J. An overview of the application of remote sensing to archaeology during the twentieth century. Mapp. Archaeol. Landsc. Space 2013, 5, 11–19. [Google Scholar]
- Riley, D.N. Air Photography and Archaeology; Duckworth & Co.: London, UK, 1987. [Google Scholar]
- Bewley, R.; ODonoghue, D.; Gaffney, V.; van Leusen, M.; Wise, A. Archiving Aerial Photography and Remote Sensing Data: A Guide to Good Practice; Groningen University: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Aminzadeh, B.; Samani, F. Identifying the boundaries of the historical site of Persepolis using remote sensing. Remote Sens. Environ. 2006, 102, 52–62. [Google Scholar] [CrossRef]
- Sabloff, J.A. The New Archaeology and the Ancient Maya; Henry Holt and Company: New York, NY, USA, 1994. [Google Scholar]
- Solomon, M.E. Archaeological records of storage pests: Sitophilus granarius (L.) (Coleoptera, Curculionidae) from an Egyptian pyramid tomb. J. Stored Prod. Res. 1965, 1, 105–107. [Google Scholar] [CrossRef]
- Martimort, P.; Arino, O.; Berger, M.; Biasutti, R.; Carnicero, B.; Del Bello, U.; Fernandez, V.; Gascon, F.; Greco, B.; Silvestrin, P. Sentinel-2 Optical High Resolution Mission for GMES Operational Services. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; pp. 2677–2680. [Google Scholar]
- Davis, D.S. Geographic Disparity in Machine Intelligence Approaches for Archaeological Remote Sensing Research. Remote Sens. 2020, 12, 921. [Google Scholar] [CrossRef] [Green Version]
- Bickler, S.H. Machine learning arrives in archaeology. Advances in Archaeological Practice 2021, 9, 186–191. [Google Scholar] [CrossRef]
- Davis, D.S. Object-based image analysis: A review of developments and future directions of automated feature detection in landscape archaeology. Archaeol. Prospect. 2019, 26, 155–163. [Google Scholar] [CrossRef]
- Stek, T.D. Drones over Mediterranean landscapes. The potential of small UAV’s (drones) for site detection and heritage management in archaeological survey projects: A case study from Le Pianelle in the Tappino Valley, Molise (Italy). J. Cult. Herit. 2016, 22, 1066–1071. [Google Scholar] [CrossRef]
- Giardino, M.J. A history of NASA remote sensing contributions to archaeology. J. Archaeol. Sci. 2011, 38, 2003–2009. [Google Scholar] [CrossRef] [Green Version]
- Parcak, S. Archaeological looting in Egypt: A geospatial view (case studies from Saqqara, Lisht, and el Hibeh). Near East. Archaeol. 2015, 78, 196–203. [Google Scholar] [CrossRef] [Green Version]
- Harrower, M.J.; Schuetter, J.; Mccorriston, J.; Goel, P.K.; Senn, M.J. Survey, Automated Detection, and Spatial Distribution Analysis of Cairn Tombs in Ancient Southern Arabia; Springer: New York, NY, USA, 2013. [Google Scholar]
- Schuetter, J.; Goel, P.; Mccorriston, J.; Park, J.; Senn, M.; Harrower, M. Autodetection of ancient Arabian tombs in high-resolution satellite imagery. Int. J. Remote Sens. 2013, 34, 6611–6635. [Google Scholar] [CrossRef]
- Caspari, G.; Balz, T.; Liu, G.; Wang, X.Y.; Liao, M. Application of Hough Forests for the Detection of Grave Mounds in High-Resolution Satellite Imagery. In Proceedings of the Geoscience & Remote Sensing Symposium, Quebec, BC, Canada, 13–18 July 2014. [Google Scholar]
- Aqdus, S.A.; Hanson, W.S.; Drummond, J. The potential of hyperspectral and multi-spectral imagery to enhance archaeological cropmark detection: A comparative study. J. Archaeol. Sci. 2012, 39, 1915–1924. [Google Scholar] [CrossRef]
- Agapiou, A.; Hadjimitsis, D.G.; Sarris, A.; Georgopoulos, A.; Alexakis, D.D. Optimum temporal and spectral window for monitoring crop marks over archaeological remains in the Mediterranean region. J. Archaeol. Sci. 2013, 40, 1479–1492. [Google Scholar] [CrossRef]
- Bewley, R.H.; Crutchley, S.P.; Shell, C.A. New light on an ancient landscape: Lidar survey in the Stonehenge World Heritage Site. Antiquity 2005, 79, 636–647. [Google Scholar] [CrossRef]
- Devereux, B.J.; Amable, G.S.; Crow, P.; Cliff, A.D. The potential of airborne lidar for detection of archaeological features under woodland canopies. Antiquity 2005, 79, 648–660. [Google Scholar] [CrossRef]
- Devereux, B.J.; Amable, G.S.; Crow, P. Visualisation of LiDAR terrain models for archaeological feature detection. Antiquity 2008, 82, 470–479. [Google Scholar] [CrossRef]
- Gallagher, J.M.; Josephs, R.L. Using LiDAR to detect cultural resources in a forested environment: An example from Isle Royale National Park, Michigan, USA. Archaeol. Prospect. 2008, 15, 187–206. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C.; Fera, M.; Janner, M. Archaeological prospection of forested areas using full-waveform airborne laser scanning. J. Archaeol. Sci. 2008, 35, 882–893. [Google Scholar] [CrossRef]
- Price, R.Z. Using LiDAR, Aerial Photography, and Geospatial Technologies to Reveal and Understand Past Landscapes in Four West Central Missouri Counties. Ph.D. Thesis, University of Kansas, Lawrence, KS, USA, 2012. [Google Scholar]
- Wang, S.; Hu, Q.; Wang, F.; Ai, M.; Zhong, R. A Microtopographic Feature Analysis-Based LiDAR Data Processing Approach for the Identification of Chu Tombs. Remote Sens. 2017, 9, 880. [Google Scholar] [CrossRef] [Green Version]
- Liu, X. Airborne LiDAR for DEM generation: Some critical issues. Prog. Phys. Geogr. 2008, 32, 31–49. [Google Scholar]
- Evans, D.H.; Fletcher, R.J.; Pottier, C.; Chevance, J.; Soutif, D.; Tan, B.S.; Im, S.; Ea, D.; Tin, T.; Kim, S.; et al. Uncovering archaeological landscapes at Angkor using lidar. Proc. Natl. Acad. Sci. USA 2013, 110, 12595–12600. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qingwu, H.U.; Wang, S.; Caiwu, F.U.; Yin, K. LiDAR remote sensing for archaeology: Discover the dying ruins of human activity traces. Chin. J. Nat. 2018, 40, 191–199. [Google Scholar]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. Isprs J. Photogramm. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Lozić, E.; Štular, B. Documentation of archaeology-specific workflow for airborne LiDAR data processing. Geosciences 2021, 11, 26. [Google Scholar] [CrossRef]
- Chase, A.; Chase, D.; Chase, A. Ethics, new colonialism, and lidar data: A decade of lidar in Maya archaeology. J. Comput. Appl. Archaeol. 2020, 3, 51–62. [Google Scholar] [CrossRef]
- Chase, A.F.; Chase, D.Z.; Weishampel, J.F.; Drake, J.B.; Shrestha, R.L.; Slatton, K.C.; Awe, J.J.; Carter, W.E. Airborne LiDAR, archaeology, and the ancient Maya landscape at Caracol, Belize. J. Archaeol. Sci. 2011, 38, 387–398. [Google Scholar] [CrossRef]
- Xinping, C. The Excavation of the Liaojian King Cemetery of the Ming Dynasty at Balingshan in Jiangling. Archeology 1995, 8, 702–712. [Google Scholar]
- Mingqing, W.; Wangao, Z.; Xiao, B.; Fanglin, C.; Zhongbiao, L.; Wei, H.; Jiazheng, W.; Chengjia, H.; Tao, P.; Gang, W.; et al. The Excavation of the Fengjiazhong Cemetery of the Chu State at Balingshan in Jingzhou, Hubei in 2011–2012. Cult. Relics 2015, 2, 9–27. [Google Scholar]
- Mingqing, W.; Wangao, Z.; Xiaobian, Z.; Zhongbiao, L.; Chengjia, H.; Tao, P.; Gang, W.; Zhangwei, X.; Zhengfa, Z.; Zumei, L.; et al. The Excavation of the Fengjiazhong Cemetery sacrificial pit of the Chu State at Balingshan in Jingzhou, Hubei in 2013. Cult. Relics 2015, 2, 28–32. [Google Scholar] [CrossRef]
- Guantao, C. The clearance of the Ming Princess Cemetery at Balingshan in Jiangling. Jianghan Archaeol. 1988, 4, 67–68. [Google Scholar]
- Magli, G. Royal mausoleums of the western Han and of the Song Chinese dynasties: A satellite imagery analysis. Archaeol. Res. Asia 2018, 15, 45–54. [Google Scholar] [CrossRef] [Green Version]
- Mercier, A.; Betbeder, J.; Rumiano, F.; Baudry, J.; Gond, V.; Blanc, L.; Bourgoin, C.; Cornu, G.; Marchamalo, M.; Poccard-Chapuis, R. Evaluation of Sentinel-1 and 2 time series for land cover classification of forest–agriculture mosaics in temperate and tropical landscapes. Remote Sens. 2019, 11, 979. [Google Scholar] [CrossRef] [Green Version]
- Dostálová, A.; Hollaus, M.; Milenković, M.; Wagner, W. Forest area derivation from Sentinel-1 data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inform.Sci. 2016, 3, 227. [Google Scholar] [CrossRef] [Green Version]
- Mattia, F.; Satalino, G.; Balenzano, A.; Rinaldi, M.; Steduto, P.; Moreno, J. Sentinel-1 for wheat mapping and soil moisture retrieval. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2832–2835. [Google Scholar]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Clevers, J.G.; Gitelson, A.A. Remote estimation of crop and grass chlorophyll and nitrogen content using red-edge bands on Sentinel-2 and-3. Int. J. Appl. Earth Obs. 2013, 23, 344–351. [Google Scholar] [CrossRef]
- Frampton, W.J.; Dash, J.; Watmough, G.; Milton, E.J. Evaluating the capabilities of Sentinel-2 for quantitative estimation of biophysical variables in vegetation. Isprs J. Photogramm. 2013, 82, 83–92. [Google Scholar] [CrossRef]
- Castiello, M.E.; Tonini, M. An Explorative Application of Random Forest Algorithm for Archaeological Predictive Modeling. A Swiss Case Study. J. Comput. Appl. Archaeol. 2021, 4, 5334. [Google Scholar] [CrossRef]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forests for land cover classification. Pattern Recogn. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Amani, M.; Ghorbanian, A.; Ahmadi, S.A.; Kakooei, M.; Moghimi, A.; Mirmazloumi, S.M.; Moghaddam, S.H.A.; Mahdavi, S.; Ghahremanloo, M.; Parsian, S. Google earth engine cloud computing platform for remote sensing big data applications: A comprehensive review. IEEE J.-Stars 2020, 13, 5326–5350. [Google Scholar] [CrossRef]
- Liss, B.; Howland, M.D.; Levy, T.E. Testing Google Earth Engine for the automatic identification and vectorization of archaeological features: A case study from Faynan, Jordan. J. Archaeol. Sci. Rep. 2017, 15, 299–304. [Google Scholar] [CrossRef] [Green Version]
- Firpi, O.A.A. Satellite data for all? Review of Google Earth Engine for archaeological remote sensing. Internet Archaeol. 2016, 42, 11141. [Google Scholar]
- Hao, A.; Gm, B. A brave new world for archaeological survey: Automated machine learning-based potsherd detection using high-resolution drone imagery. J. Archaeol. Sci. 2019, 112, 105013. [Google Scholar]
- Orengo, H.A.; Conesa, F.C.; Garcia-Molsosa, A.; Lobo, A.; Green, A.S.; Madella, M.; Petrie, C.A. Automated detection of archaeological mounds using machine-learning classification of multisensor and multitemporal satellite data. Proc. Nat.l Acad. Sci. USA 2020, 117, 18240–18250. [Google Scholar] [CrossRef] [PubMed]
- Štular, B.; Kokalj, O.K.; Nuninger, L. Visualization of lidar-derived relief models for detection of archaeological features. J. Archaeol. Sci. 2012, 39, 3354–3360. [Google Scholar] [CrossRef]
- Guth, P.L.; Van Niekerk, A.; Grohmann, C.H.; Muller, J.; Hawker, L.; Florinsky, I.V.; Gesch, D.; Reuter, H.I.; Herrera-Cruz, V.; Riazanoff, S. Digital elevation models: Terminology and definitions. Remote Sens. 2021, 13, 3581. [Google Scholar] [CrossRef]
- Masini, N.; Abate, N.; Gizzi, F.T.; Vitale, V.; Minervino Amodio, A.; Sileo, M.; Biscione, M.; Lasaponara, R.; Bentivenga, M.; Cavalcante, F. UAV LiDAR Based Approach for the Detection and Interpretation of Archaeological Micro Topography under Canopy—The Rediscovery of Perticara (Basilicata, Italy). Remote Sens. 2022, 14, 6074. [Google Scholar] [CrossRef]
- Štular, B.; Lozić, E.; Eichert, S. Airborne LiDAR-derived digital elevation model for archaeology. Remote Sens. 2021, 13, 1855. [Google Scholar] [CrossRef]
- Monterroso-Checa, A. Geoarchaeological Characterisation of Sites of Iberian and Roman Cordoba Using LiDAR Data Acquisitions. Geosciences 2019, 9, 205. [Google Scholar] [CrossRef]
- Museum, J. The Excavation of the Burials of the Han and Song Dynasties at Heyue Neighborhood in Jingzhou City, Hubei. Relics Museol. 2016, 13, 1. [Google Scholar]
- Museum, J. The Excavation of the Zhangjia Wutai Cemetery in Jingzhou, Hubei. Relics and Museol. 2017, 4, 21. [Google Scholar]
- Zhu, J.; Yang, K.; Li, Z.; Peng, J.; Wang, J.; Chen, X. The Excavation of the Xi Hujiatai Cemetery in Jingzhou City, Hubei. Relics Museol. 2016, 2, 20–34. [Google Scholar]
- Vogel, S.; Märker, M. Analysis of post-burial soil developments of pre-AD 79 Roman paleosols near Pompeii (Italy). Open J. Soil Sci. 2014, 4, 337. [Google Scholar] [CrossRef] [Green Version]
- Xue, J.; Su, B. Significant remote sensing vegetation indices: A review of developments and applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef] [Green Version]
- Arnau, A.C.; Reynolds, A.; Lasaponara, R.; Crutchley, S.; Cowley, D.C.; Guio, A.D.; Masini, N. New directions in medieval landscape archaeology: An anglo-saxon perspective; Aerial photographs and aerial reconnaissance for landscape studies; Using airborne li. In Detecting and Understanding Historic Landscapes: Approaches, Methods and Beneficiaries; University of Padova: Padova, Italy, 2015. [Google Scholar]
- Kaimaris, D.; Patias, P.; Tsakiri, M. Best period for high spatial resolution satellite images for the detection of marks of buried structures. Egypt. J. Remote Sens. Space Sci. 2012, 15, 9–18. [Google Scholar] [CrossRef] [Green Version]
- Elfadaly, A.; Abate, N.; Masini, N.; Lasaponara, R. SAR Sentinel 1 Imaging and Detection of Palaeo-Landscape Features in the Mediterranean Area. Remote Sens. 2020, 12, 2611. [Google Scholar] [CrossRef]
- Michenot, F.; Manfredi, G.; Guinvarc, H.R.; Thirion-Lefevre, L. Use of Sentinel-1 Time-Serises for Archaeological Structures Detection; IEEE: Hoboken, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Agapiou, A.; Alexakis, D.D.; Sarris, A.; Hadjimitsis, D.G. Evaluating the Potentials of Sentinel-2 for Archaeological Perspective. Remote Sens. 2014, 6, 2176–2194. [Google Scholar] [CrossRef] [Green Version]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Knipling, E.B. Physical and physiological basis for the reflectance of visible and near-infrared radiation from vegetation. Remote Sens Environ 1970, 1, 155–159. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS: NASA SP-351. In Proceedings of the Third Earth Resources Technology Satellite-1 Symposium, Washington, DC, USA, 10–14 December 1974; pp. 301–317. [Google Scholar]
- Pettorelli, N. The Normalized Difference Vegetation Index; Oxford University Press: Oxford, UK, 2013. [Google Scholar]
- Jiang, Z.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Gao, B. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Zha, Y.; Gao, J.; Ni, S. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]
- Irons, J.R.; Markham, B.L.; Nelson, R.F.; Toll, D.L.; Williams, D.L.; Latty, R.S.; Stauffer, M.L. The effects of spatial resolution on the classification of Thematic Mapper data. Int. J. Remote Sens. 1985, 6, 1385–1403. [Google Scholar] [CrossRef]
- Kaur, S.; Bansal, R.K.; Mittal, M.; Goyal, L.M.; Kaur, I.; Verma, A.; Son, L.H. Mixed pixel decomposition based on extended fuzzy clustering for single spectral value remote sensing images. J. Indian Soc. Remote 2019, 47, 427–437. [Google Scholar] [CrossRef]
- Gebbinck, M.S.K.; Schouten, T.E. Decomposition of mixed pixels. In Image and Signal Processing for Remote Sensing II; International Society for Optics and Photonics: London, UK, 1995; pp. 104–115. [Google Scholar]
- Wang, L.; Xu, S.; Li, Q.; Xue, H.; Wu, J. Extraction of winter wheat planted area in Jiangsu province using decision tree and mixed-pixel methods. Trans. Chin. Soc. Agric. Eng. 2016, 32, 182–187. [Google Scholar]
- Xiong, F.; Zhou, J.; Tao, S.; Lu, J.; Qian, Y. SNMF-Net: Learning a deep alternating neural network for hyperspectral unmixing. IEEE Trans. Geosci. Remote 2021, 60, 1–16. [Google Scholar] [CrossRef]
- Fernandez-Beltran, R.; Plaza, A.; Plaza, J.; Pla, F. Hyperspectral unmixing based on dual-depth sparse probabilistic latent semantic analysis. IEEE Trans. Geosci. Remote 2018, 56, 6344–6360. [Google Scholar] [CrossRef]
- Bannari, A.; Morin, D.; Bonn, F.; Huete, A. A review of vegetation indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Govender, M.; Chetty, K.; Bulcock, H. A review of hyperspectral remote sensing and its application in vegetation and water resource studies. Water SA 2007, 33, 145–151. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing: A comprehensive review and list of resources. IEEEGeosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Chen, Z.; Jiang, H.; Jing, W.; Sun, L.; Feng, M. Evaluation of three deep learning models for early crop classification using sentinel-1A imagery time series—A case study in Zhanjiang, China. Remote Sens. 2019, 11, 2673. [Google Scholar] [CrossRef]
- Gupta, E.; Das, S.; Balan, K.S.C.; Kumar, V.; Rajani, M.B. The need for a National Archaeological database. Curr. Sci. India 2017, 113, 1961–1973. [Google Scholar] [CrossRef]
- Kintigh, K. The promise and challenge of archaeological data integration. Am. Antiq. 2006, 71, 567–578. [Google Scholar] [CrossRef] [Green Version]
- Song, X.; Potapov, P.V.; Krylov, A.; King, L.; Di Bella, C.M.; Hudson, A.; Khan, A.; Adusei, B.; Stehman, S.V.; Hansen, M.C. National-scale soybean mapping and area estimation in the United States using medium resolution satellite imagery and field survey. Remote Sens. Environ. 2017, 190, 383–395. [Google Scholar] [CrossRef]
- Kim, Y.; Kimball, J.S.; Didan, K.; Henebry, G.M. Response of vegetation growth and productivity to spring climate indicators in the conterminous United States derived from satellite remote sensing data fusion. Agric. For. Meteorol. 2014, 194, 132–143. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, H.; Chen, B.; Zhang, H.; Innes, J.L.; Wang, G.; Yan, J.; Zheng, Y.; Zhu, Z.; Myneni, R.B. Changes in vegetation growth dynamics and relations with climate over China’s landmass from 1982 to 2011. Remote Sens. 2014, 6, 3263–3283. [Google Scholar] [CrossRef] [Green Version]
- Mohammat, A.; Wang, X.; Xu, X.; Peng, L.; Yang, Y.; Zhang, X.; Myneni, R.B.; Piao, S. Drought and spring cooling induced recent decrease in vegetation growth in Inner Asia. Agric. For. Meteorol. 2013, 178, 21–30. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Type | Resolution/m |
|---|---|---|
| DSM | Grid | 1 |
| Sentinel-1 | Grid | 5 × 20 |
| Sentinel-2 | Grid | 10/20 |
| Identified ancient tombs | Vector | -- |
| Working Modes | Width/km | Distance Resolution/m | Azimuth Resolution/m | Incidence Angle/° | Polarization Mode | Pixel/m |
|---|---|---|---|---|---|---|
| IW | 250 | 5 | 20 | 29.1~46 | HH + HH VV + VH HH, VV | 10 |
| Band | Wavelength Range/nm | Spatial Resolution/m |
|---|---|---|
| B2(blue)(B) | 458~523 | 10 |
| B3(green)(G) | 543~578 | 10 |
| B4(red)(R) | 650~680 | 10 |
| B5(red edge 1) | 698~713 | 20 |
| B6(red edge 2) | 733~748 | 20 |
| B7(red edge 3) | 773~793 | 20 |
| B8(Near InfraRed) | 785~900 | 10 |
| B8A(NIR narrow 2) | 855~875 | 20 |
| B11(Short Wave InfraRed) | 1.565~1.655 | 20 |
| B12(Short Wave InfraRed) | 2.100~2.280 | 20 |
| Ancient Tombs | Non-Ancient Tombs | |
|---|---|---|
| Training points | 9797 | 6230 |
| Test points | 4197 | 2670 |
| Sentinel-1 | Sentinel-2 | |
|---|---|---|
| Combination 1 | - | B2, B3, B4, B5, B6, B7, B8, B8A, B11, B12, NDVI, SAVI, EVI, B8_ASM, B8_CON, B8_CORR, B8_ENT |
| Combination 2 | VV, VH | B2, B3, B4, B5, B6, B7, B8, B8A, B11, B12, NDVI, SAVI, EVI, B8_ASM, B8_CON, B8_CORR, B8_ENT |
| Class | 1 | 2 | Producer Accuracy | Class | 1 | 2 | Producer Accuracy |
|---|---|---|---|---|---|---|---|
| 1 1 | 457 | 14 | 96.41% | 1 | 453 | 12 | 97.42% |
| 2 2 | 4 | 151 | 94.38% | 2 | 4 | 175 | 96.15% |
| User accuracy | 99.13% | 89.88% | User accuracy | 99.12% | 91.15% | ||
| OA: 95.68% Kappa: 90.47% | OA: 96.57% Kappa: 92.97% | ||||||
| Ancient Tombs Consistent with the Test Results | Measured Number of Ancient Tombs | Accuracy | |
|---|---|---|---|
| Combination 1 | 163 | 190 | 85.78% |
| Combination 2 | 167 | 190 | 87.89% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Hu, Q.; Wang, S.; Zou, F.; Ai, M.; Zhao, P. Discovering the Ancient Tomb under the Forest Using Machine Learning with Timing-Series Features of Sentinel Images: Taking Baling Mountain in Jingzhou as an Example. Remote Sens. 2023, 15, 554. https://doi.org/10.3390/rs15030554
Liu Y, Hu Q, Wang S, Zou F, Ai M, Zhao P. Discovering the Ancient Tomb under the Forest Using Machine Learning with Timing-Series Features of Sentinel Images: Taking Baling Mountain in Jingzhou as an Example. Remote Sensing. 2023; 15(3):554. https://doi.org/10.3390/rs15030554
Chicago/Turabian StyleLiu, Yichuan, Qingwu Hu, Shaohua Wang, Fengli Zou, Mingyao Ai, and Pengcheng Zhao. 2023. "Discovering the Ancient Tomb under the Forest Using Machine Learning with Timing-Series Features of Sentinel Images: Taking Baling Mountain in Jingzhou as an Example" Remote Sensing 15, no. 3: 554. https://doi.org/10.3390/rs15030554