
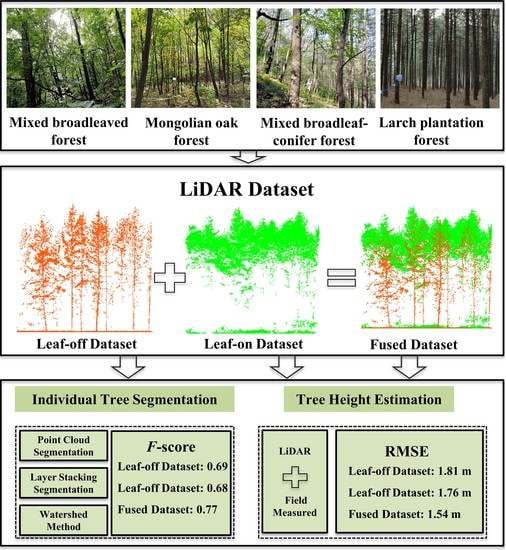
Individual Tree Segmentation and Tree Height Estimation Using Leaf-Off and Leaf-On UAV-LiDAR Data in Dense Deciduous Forests

 ,
,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Field Data Collection
2.3. LiDAR Data Collection
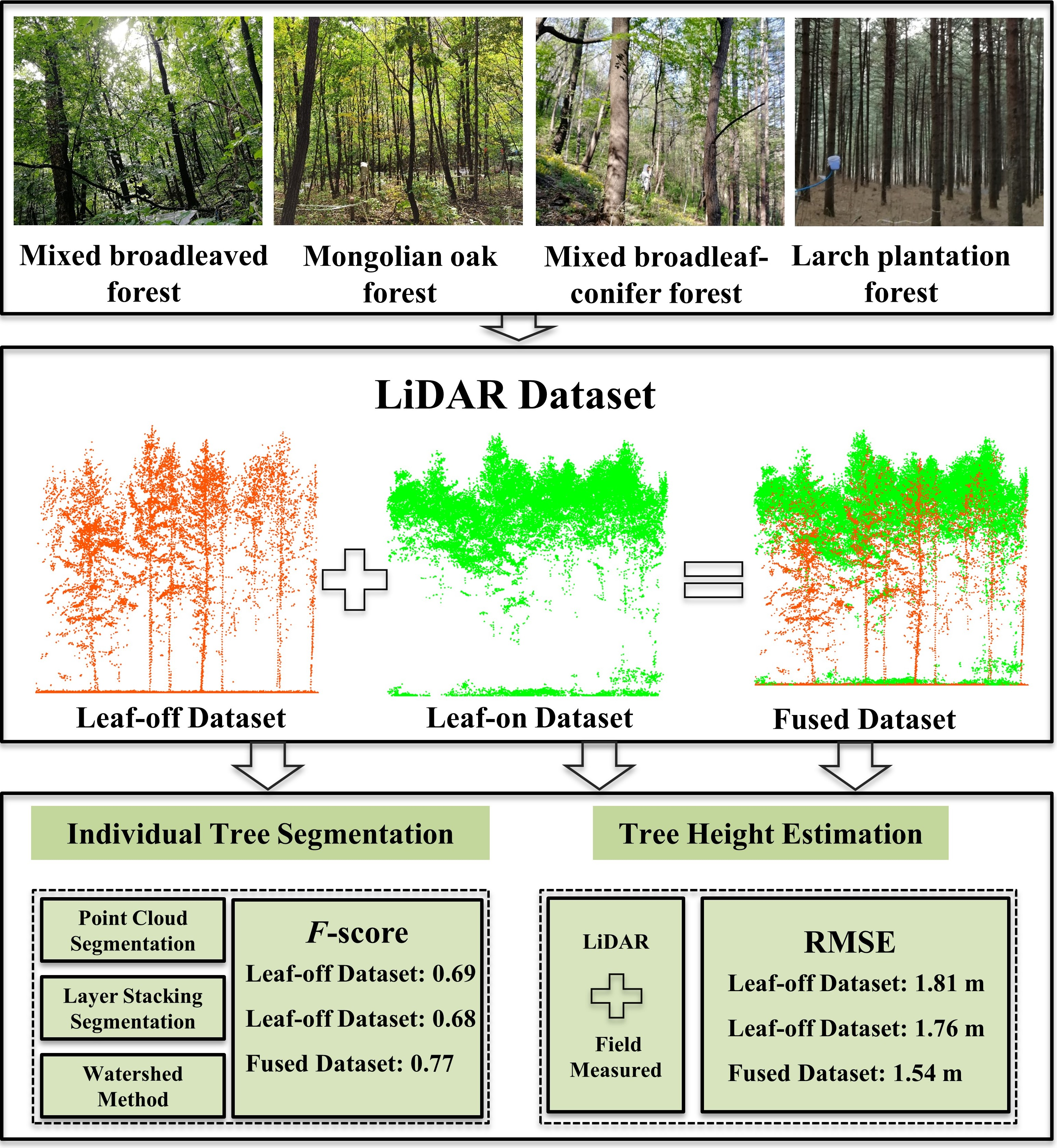
2.4. Data Preprocessing
2.5. Individual Tree Segmentation Algorithms
2.6. Estimation of Tree Height
2.7. Accuracy Assessment
3. Results
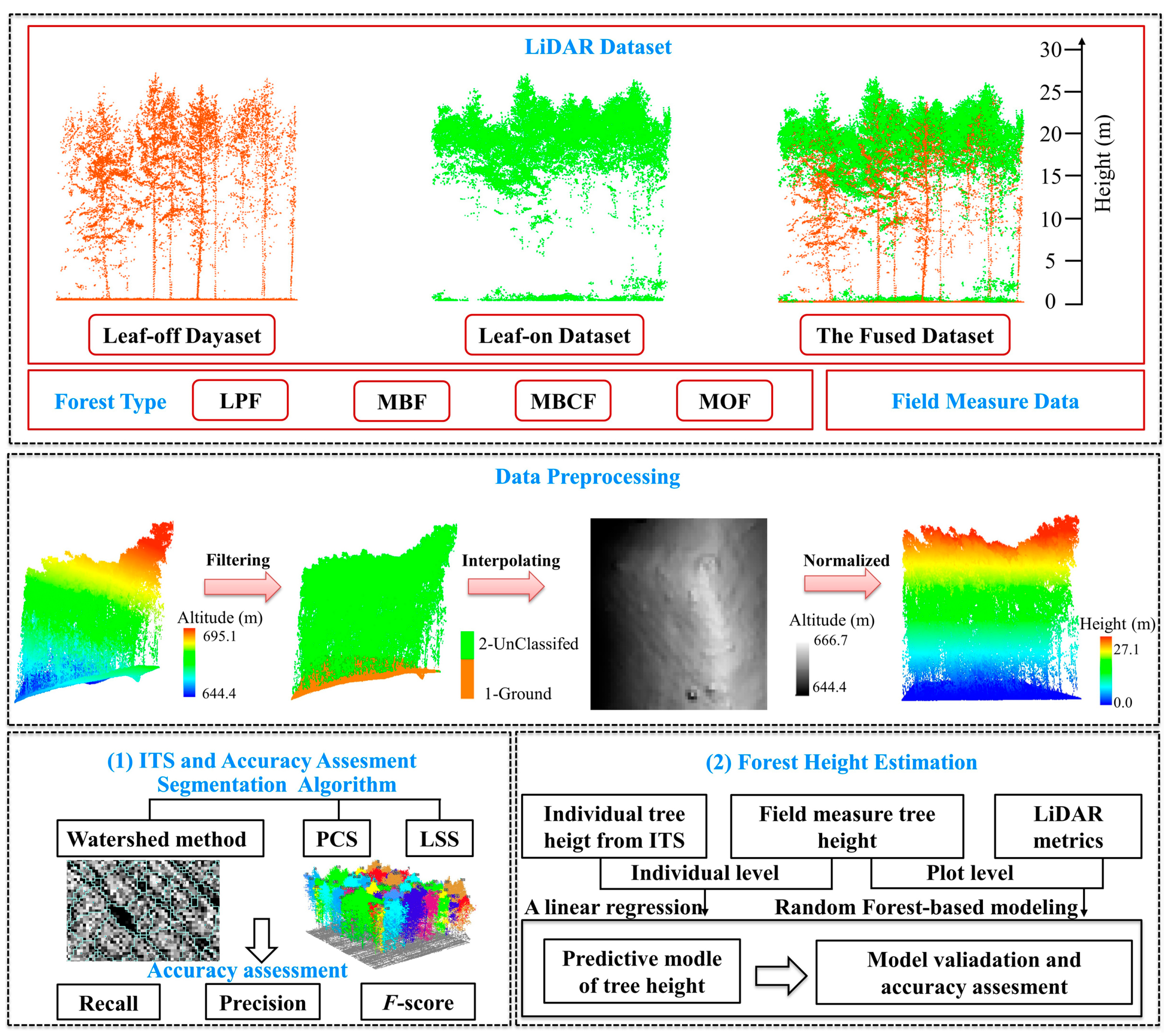
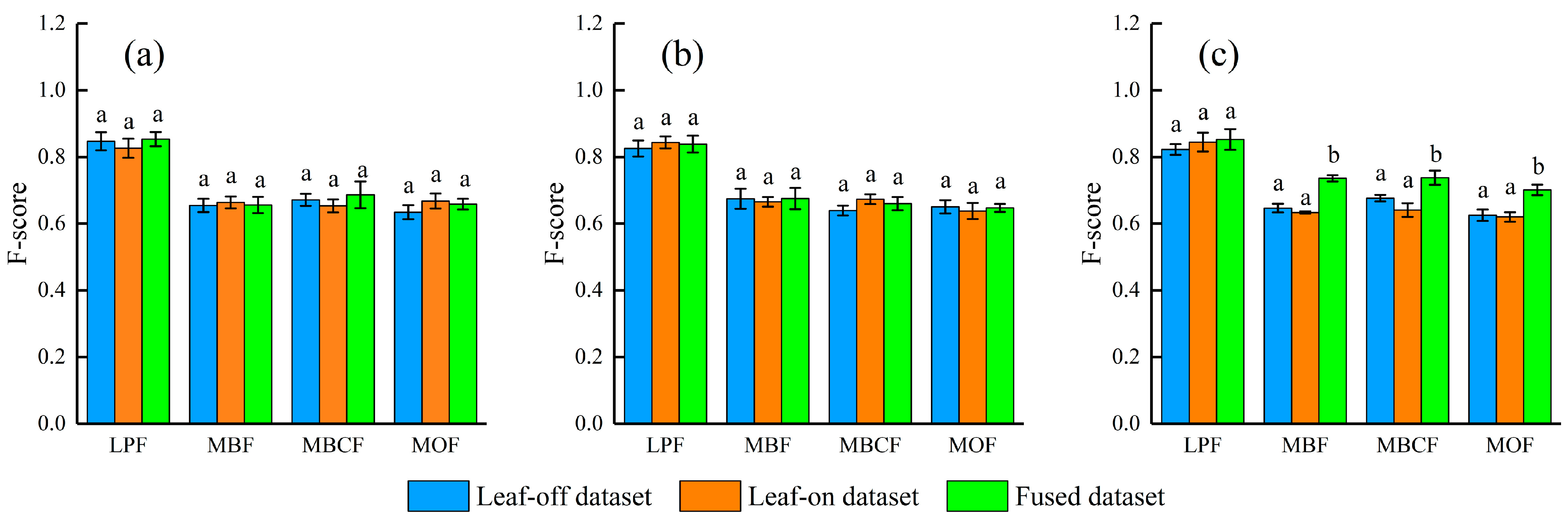
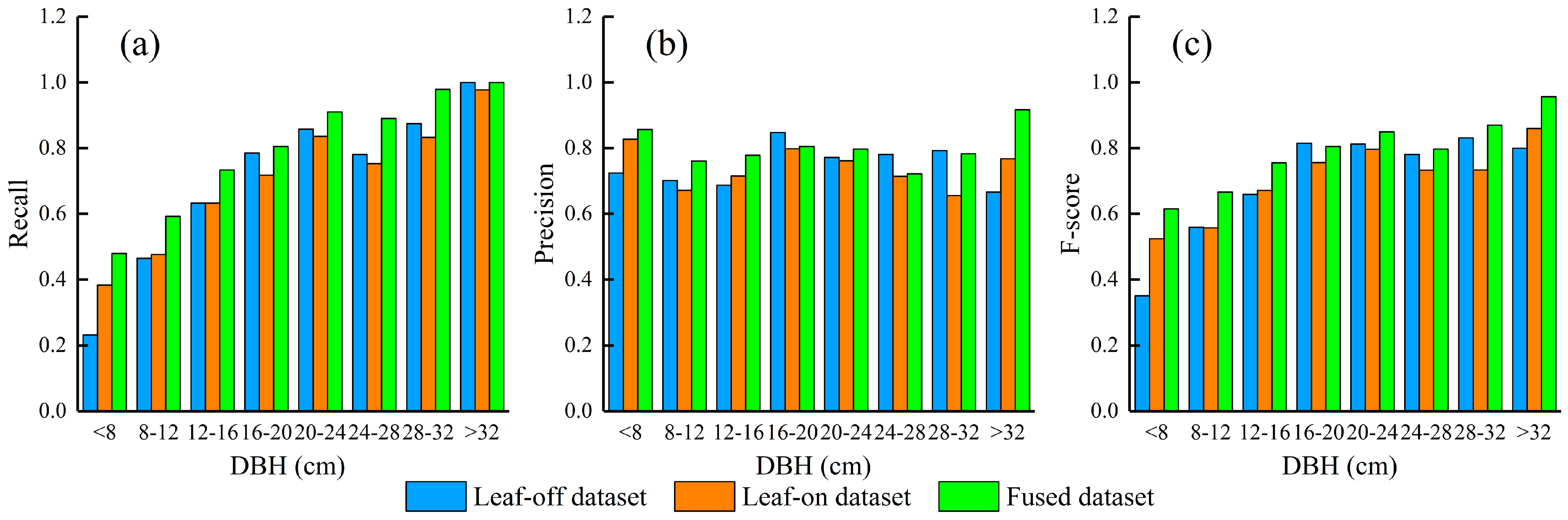
3.1. Performance of ITS
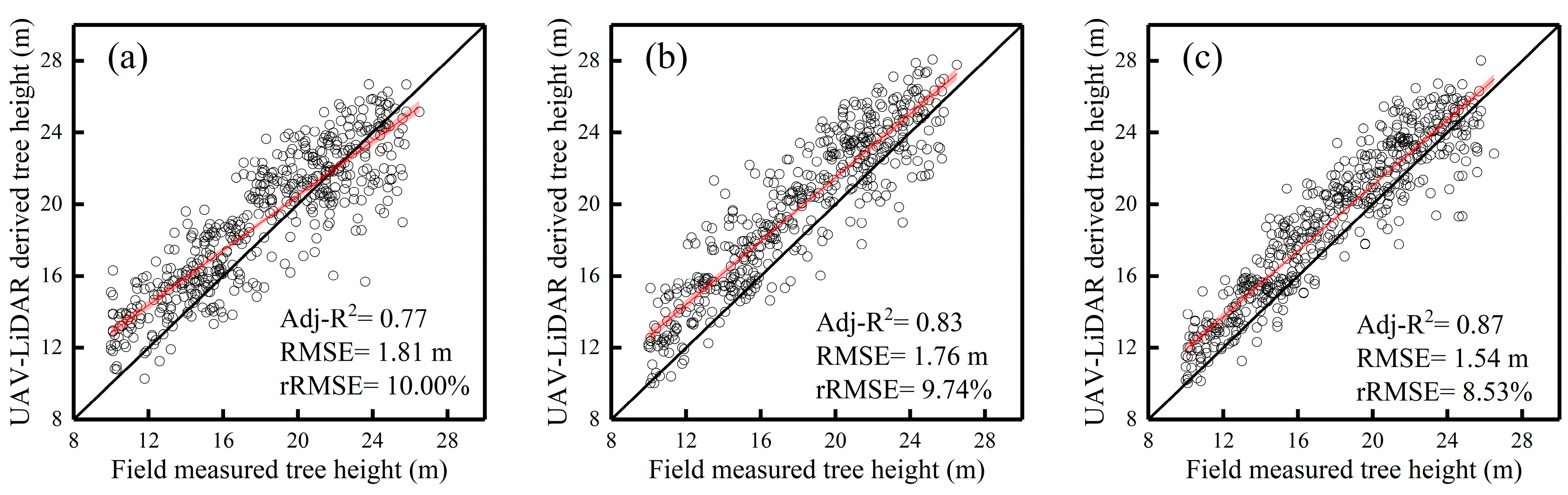
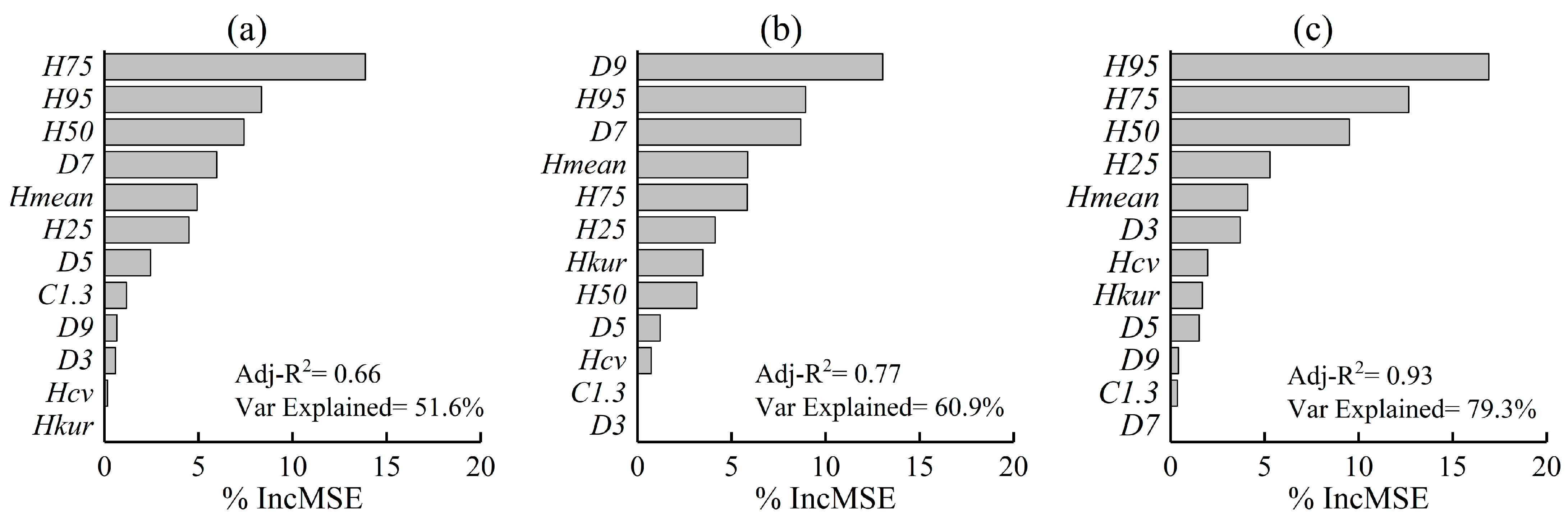
3.2. Estimation of Tree Height
4. Discussion
4.1. ITS Accuracy
4.2. Uncertainty of Tree Height Estimation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wolf, J.A.; Fricker, G.A.; Meyer, V.; Hubbell, S.P.; Gillespie, T.W.; Saatchi, S.S. Plant Species Richness is Associated with Canopy Height and Topography in a Neotropical Forest. Remote Sens. 2012, 4, 4010–4021. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Huang, B.; Zhou, Z.; Tang, J.; Yu, Y. Involvement of Caspase3 in the Acute Stress Response to High Temperature and Elevated Ammonium in Stony Coral Pocillopora Damicornis. Gene 2017, 637, 108–114. [Google Scholar] [CrossRef] [PubMed]
- Ayrey, E.; Hayes, D.J.; Fraver, S.; Kershaw, J.A.; Weiskittel, A.R. Ecologically-Based Metrics for Assessing Structure in Developing Area-Based, Enhanced Forest Inventories from LiDAR. Can. J. Remote Sens. 2019, 45, 88–112. [Google Scholar] [CrossRef]
- Zhao, Y.; Ma, Y.; Quqckenbush, L.J.; Zhen, Z. Estimation of Individual Tree Biomass in Natural Secondary Forests Based on ALS Data and WorldView-3 Imagery. Remote Sens. 2022, 14, 1305–1311. [Google Scholar] [CrossRef]
- Lu, D.; Zhu, J.; Wu, D.; Chen, Q.; Yu, Y.; Wang, J.; Zhu, C.; Liu, H.; Gao, T.; Wang, G.G. Detecting dynamics and variations of crown asymmetry induced by natural gaps in a temperate secondary forest using terrestrial laser scanning. For. Ecol. Manag. 2020, 473, 118289. [Google Scholar] [CrossRef]
- Yu, Y.; Gao, T.; Zhu, J.; Wei, X.; Guo, Q.; Su, Y.; Li, Y.; Deng, S.; Li, M. Terrestrial Laser Scanning-Derived Canopy Interception Index for Predicting Rainfall Interception. Ecohydrology 2020, 13, e2212. [Google Scholar] [CrossRef]
- Itakura, K.; Hosoi, F. Automatic Individual Tree Detection and Canopy Segmentation from Three-Dimensional Point Cloud Images Obtained from Ground-Based Lidar. J. Agric. Meteorol. 2018, 74, 109–113. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Guo, Q.; Li, W.; Flanagan, J. A Bottom-up Approach to Segment Individual Deciduous Trees Using Leaf-off Lidar Point Cloud Data. ISPRS J. Photogramm. Remote Sens. 2014, 94, 1–12. [Google Scholar] [CrossRef]
- Ardila, J.P.; Bijker, W.; Tolpekin, V.A.; Stein, A. Context-Sensitive Extraction of Tree Crown Objects in Urban Areas Using VHR Satellite Images. Int. J. Appl. Earth Obs. Geoinf. 2012, 15, 57–69. [Google Scholar] [CrossRef] [Green Version]
- Song, C.; Dickinson, M.B.; Su, L.; Zhang, S.; Yaussey, D. Estimating Average Tree Crown Size Using Spatial Information from Ikonos and QuickBird Images: Across-Sensor and Across-Site Comparisons. Remote Sens. Environ. 2010, 114, 1099–1107. [Google Scholar] [CrossRef]
- Gong, P.; Sheng, Y.; Biging, G.S. 3D Model-Based Tree Measurement from High-Resolution Aerial Imagery. Photogramm. Eng. Remote Sens. 2002, 68, 1203–1212. [Google Scholar]
- Rahman, M.F.; Onoda, Y.; Kitajima, K. Forest canopy height variation in relation to topography and forest types in central Japan with LiDAR. For. Ecol. Manag. 2022, 503, 199792. [Google Scholar] [CrossRef]
- Yang, J.; Kang, Z.; Cheng, S.; Yang, Z.; Akwensi, P.H. An Individual Tree Segmentation Method Based on Watershed Algorithm and Three-Dimensional Spatial Distribution Analysis From Airborne LiDAR Point Clouds. IEEE J. Sel. Top Appl. Earth Obs. Remote Sens. 2020, 13, 1055–1067. [Google Scholar] [CrossRef]
- Chen, W.; Xiang, H.; Moriya, K. Individual Tree Position Extraction and Structural Parameter Retrieval Based on Airborne LiDAR Data: Performance Evaluation and Comparison of Four Algorithms. Remote Sens. 2020, 12, 571. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland Using Small Footprint Lidar Data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef] [Green Version]
- Ene, L.; Naesset, E.; Gobakken, T. Single Tree Detection in Heterogeneous Boreal Forests Using Airborne Laser Scanning and Area-Based Stem Number Estimates. Int. J. Remote Sens. 2012, 33, 5171–5193. [Google Scholar] [CrossRef]
- Hyyppa, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A Segmentation-Based Method to Retrieve Stem Volume Estimates from 3-D Tree Height Models Produced by Laser Scanners. Int. J. Remote Sens. 2001, 39, 969–975. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.J.; Zhang, L. Impact of Tree-Oriented Growth Order in Marker-Controlled Region Growing for Individual Tree Crown Delineation Using Airborne Laser Scanner (ALS) Data. Remote Sens. 2014, 6, 555–579. [Google Scholar] [CrossRef] [Green Version]
- Hamraz, H.; Contreras, M.A.; Zhang, J. A Robust Approach for Tree Segmentation in Deciduous Forests Using Small-Footprint Airborne LiDAR Data. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 532–541. [Google Scholar] [CrossRef] [Green Version]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of Individual Tree Crowns in Airborne Lidar Data. Photogramm. Eng. Remote Sens. 2006, 72, 357–363. [Google Scholar] [CrossRef] [Green Version]
- Guo, Q.; Li, W.; Yu, H.; Alvarez, O. Effects of Topographic Variability and Lidar Sampling Density on Several DEM Interpolation Methods. Photogramm. Eng. Remote Sens. 2010, 76, 701–712. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Jakubowski, M.K.; Li, W.; Guo, Q.; Kelly, M. Delineating Individual Trees from Lidar Data: A Comparison of Vector- and Raster-based Segmentation Approaches. Remote Sens. 2013, 5, 4163–4186. [Google Scholar] [CrossRef] [Green Version]
- Reitberger, J.; Schnoerr, C.; Krzystek, P.; Stilla, U. 3D Segmentation of Single Trees Exploiting Full Waveform LIDAR Data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 561–574. [Google Scholar] [CrossRef]
- Ayrey, E.; Fraver, S.; Kershaw, J.A.; Kenefic, L.S.; Hayes, D.; Weiskittel, A.R.; Roth, B.E. Layer Stacking: A Novel Algorithm for Individual Forest Tree Segmentation from LiDAR Point Clouds. Can. J. Remote Sens. 2017, 43, 16–27. [Google Scholar] [CrossRef]
- Barnes, C.; Balzter, H.; Barrett, K.; Eddy, J.; Milner, S.; Suárez, J. Individual Tree Crown Delineation from Airborne Laser Scanning for Diseased Larch Forest Stands. Remote Sens. 2017, 9, 231. [Google Scholar] [CrossRef] [Green Version]
- Dai, W.; Yang, B.; Dong, Z.; Shaker, A. A New Method for 3D Individual Tree Extraction Using Multispectral Airborne LiDAR Point Clouds. ISPRS J. Photogramm. Remote Sens. 2018, 144, 400–411. [Google Scholar] [CrossRef]
- Wu, X.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Assessment of Individual Tree Detection and Canopy Cover Estimation Using Unmanned Aerial Vehicle based Light Detection and Ranging (UAV-LiDAR) Data in Planted Forests. Remote Sens. 2019, 11, 908. [Google Scholar] [CrossRef] [Green Version]
- Duncanson, L.I.; Cook, B.D.; Hurtt, G.C.; Dubayah, R.O. An Efficient, Multi-Layered Crown Delineation Algorithm for Mapping Individual Tree Structure Across Multiple Ecosystems. Remote Sens. Environ. 2014, 154, 378–386. [Google Scholar] [CrossRef]
- Jing, L.; Hu, B.; Li, J.; Noland, T. Automated Delineation of Individual Tree Crowns from Lidar Data by Multi-Scale Analysis and Segmentation. Photogramm. Eng. Remote Sens. 2012, 78, 1275–1284. [Google Scholar] [CrossRef]
- Tochon, G.; Feret, J.B.; Valero, S.; Martin, R.E.; Knapp, D.E.; Salembier, P.; Chanussot, J.; Asner, G.P. On the Use of Binary Partition Trees for The Tree Crown Segmentation of Tropical Rainforest Hyperspectral Images. Remote Sens. Environ. 2015, 159, 318–331. [Google Scholar] [CrossRef] [Green Version]
- Nuijten, R.J.G.; Coops, N.C.; Goodbody, T.R.H.; Pelletier, G. Examining the Multi-Seasonal Consistency of Individual Tree Segmentation on Deciduous Stands Using Digital Aerial Photogrammetry (DAP) and Unmanned Aerial Systems (UAS). Remote Sens. 2019, 11, 739. [Google Scholar] [CrossRef] [Green Version]
- Yan, Q.; Gang, Q.; Zhu, J. Size-Dependent Patterns of Seed Rain in Gaps in Temperate Secondary Forests, Northeast China. Forests 2019, 10, 123. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Mao, Z.; Hu, L.; Zhang, J. Plant Diversity of Secondary Forests in Response to Anthropogenic Disturbance Levels in Montane Regions of Northeastern China. J. For. Res. 2007, 12, 403–416. [Google Scholar] [CrossRef]
- Smith, A.M.S.; Falkowski, M.J.; Hudak, A.T.; Evans, J.S.; Robinson, A.P.; Steele, C.M. A Cross-Comparison of Field, Spectral, and Lidar Estimates of Forest Canopy Cover. Can. J. Remote Sens. 2009, 35, 447–459. [Google Scholar] [CrossRef]
- Lee, H.; Slatton, K.C.; Roth, B.E.; Cropper, W.P., Jr. Adaptive Clustering of Airborne LiDAR Data to Segment Individual Tree Crowns in Managed Pine Forests. Int. J. Remote Sens. 2010, 31, 117–139. [Google Scholar] [CrossRef]
- Yang, Q.; Su, Y.; Jin, S.; Kelly, M.; Hu, T.; Ma, Q.; Li, Y.; Song, S.; Zhang, J.; Xu, G.; et al. The Influence of Vegetation Characteristics on Individual Tree Segmentation Methods with Airborne LiDAR Data. Remote Sens. 2019, 11, 2880. [Google Scholar] [CrossRef] [Green Version]
- Mesev, V. Morphological Image Analysis: Principles and Applications. Environ. Plann. B-Plann. Des. 2001, 28, 800–801. [Google Scholar]
- Pitkänen, J.; Maltamo, M.; Hyyppä, J.; Yu, X. Adaptive Methods for Individual Tree Detection on Airborne Laser Based Canopy Height Model. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2004, 36, 187–191. [Google Scholar]
- Cao, L.; Liu, K.; Shen, X.; Wu, X.; Liu, H. Estimation of Forest Structural Parameters Using UAV-LiDAR Data and a Process-Based Model in Ginkgo Planted Forests. IEEE J. Sel. Top Appl. Earth Obs. Remote Sens. 2019, 12, 4175–4190. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T. Estimating Forest Growth Using Canopy Metrics Derived from Airborne Laser Scanner Data. Remote Sens. Environ. 2005, 96, 453–465. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and Regression by Randomforest. R News 2002, 2, 18–22. [Google Scholar]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.; et al. Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef] [Green Version]
- Ahongshangbam, J.; Roell, A.; Ellsaesser, F.; Hendrayanto; Hoelscher, D. Airborne Tree Crown Detection for Predicting Spatial Heterogeneity of Canopy Transpiration in a Tropical Rainforest. Remote Sens. 2020, 12, 651. [Google Scholar] [CrossRef] [Green Version]
- Goutte, C.; Gaussier, E. A Probabilistic Interpretation of Precision, Recall and F-score, with Implication for Evaluation. In Advances in Information Retrieval; Losada, D.E., FernandezLuna, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3408, pp. 345–359. [Google Scholar]
- Sokolova, M.; Japkowicz, N.; Szpakowicz, S. Beyond Accuracy, F-Score and ROC: A Family of Discriminant Measures for Performance Evaluation. In Ai 2006: Advances in Artificial Intelligence, Proceedings; Sattar, A., Kang, B.H., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4304, pp. 1015–1021. [Google Scholar]
- Hill, R.A.; Broughton, R.K. Mapping the Understorey of Deciduous Woodland from Leaf-on and Leaf-off Airborne LiDAR Data: A Case Study in Lowland Britain. ISPRS J. Photogramm. Remote Sens. 2009, 64, 223–233. [Google Scholar] [CrossRef]
- Smits, I.; Prieditis, G.; Dagis, S.; Dubrovskis, D. Individual Tree Identification Using Different LIDAR and Optical Imagery Data Processing Methods. Biosyst. Inf. Technol. 2012, 1, 19–24. [Google Scholar] [CrossRef]
- Magnussen, S.; Eggermont, P.; LaRiccia, V.N. Recovering Tree Heights from Airborne Laser Scanner Data. For. Sci. 1999, 45, 407–422. [Google Scholar]
- Bazezew, M.N.; Hussin, Y.A.; Kloosterman, E.H. Integrating Airborne LiDAR and Terrestrial Laser Scanner Forest Parameters for Accurate Above-Ground Biomass/Carbon Estimation in Ayer Hitam Tropical Forest, Malaysia. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 638–652. [Google Scholar] [CrossRef]
- Lu, J.; Wang, H.; Qin, S.; Cao, L.; Pu, R.; Li, G.; Sun, J. Estimation of Aboveground Biomass of Robinia Pseudoacacia Forest in The Yellow River Delta Based on UAV and Backpack LiDAR Point Clouds. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S.; Nelson, R. Lidar Remote Sensing of Forest Biomass: A Scale-Invariant Estimation Approach Using Airborne Lasers. Remote Sens. Environ. 2009, 113, 182–196. [Google Scholar] [CrossRef]
- Lang, A.C.; Hardtle, W.; Bruelheide, H.; Geissler, C.; Nadrowski, K.; Schuldt, A.; Yu, M.J.; von Oheimb, G. Tree Morphology Responds to Neighbourhood Competition and Slope in Species-Rich Forests of Subtropical China. For. Ecol. Manag. 2010, 260, 1708–1715. [Google Scholar] [CrossRef]
- Vega, C.; Durrieu, S. Multi-Level Filtering Segmentation to Measure Individual Tree Parameters Based on Lidar Data: Application to A Mountainous Forest with Heterogeneous Stands. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 646–656. [Google Scholar] [CrossRef] [Green Version]
- Khosravipour, A.; Skidmore, A.K.; Wang, T.; Isenburg, M.; Khoshelham, K. Effect of Slope on Treetop Detection Using A LiDAR Canopy Height Model. ISPRS J. Photogrammetry Remote Sens. 2015, 104, 44–52. [Google Scholar] [CrossRef]
- Andersen, H.E.; Reutebuch, S.E.; McGaughey, R.J. A Rigorous Assessment of Tree Height Measurements Obtained Using Airborne Lidar and Conventional Field Methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Itakura, K.; Kamakura, I.; Hosoi, F. Calculation of Moving Distance when Measuring Tree Height Using Portable Scanning Lidar and Tree Height Measurement by Using Registration of Images Obtained on the Ground and High Places. Eco-Engineering 2018, 30, 7–14. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest Type | Number of Plots | Lorey’s Height (m) | DBH (cm) | Stem Density (Tree·ha−1) | Stem Density in the Dominant Canopy (Tree·ha−1) |
|---|---|---|---|---|---|
| MBF | 6 | 19.8 ± 2.2 | 16.9 ± 1.3 | 841.7 ± 269.7 | 483.3 ± 128.4 |
| MOF | 5 | 14.8 ± 1.7 | 14.6 ± 1.5 | 1060 ± 60.2 | 800 ± 35.0 |
| MBCF * | 8 | 21.8 ± 0.8 | 19.1 ± 1.2 | 843.8 ± 172.0 | 579.2 ± 153.2 |
| LPF | 6 | 20.7 ± 2.0 | 19.1 ± 2.3 | 997.2 ± 317.6 | 952.8 ± 320.2 |
| Attribute | Leaf-Off Dataset | Leaf-On Dataset |
|---|---|---|
| Acquisition date | 15 April 2018 | 22 August 2018 |
| Scan sensor | Riegl VUX-1LR | Riegl VUX-1LR |
| Flight altitude (m asl) | 300 | 300 |
| Flight speed (m∙s−1) | 3.6 | 3.6 |
| Maximum effective measurement rate (pts∙s−1) | 750,000 | 500,000 |
| Footprint (cm) | 25 | 25 |
| Side overlap (%) | 30 | 30 |
| Average point density (pts∙m−2) | 110 | 280 |
| Maximum field of view angle (°) | 330 | 330 |
| Absolute accuracy (mm) | ±50 | ±50 |
| Metrics | Description | |
|---|---|---|
| Height-based | Height percentiles (H25, H50, H75, H95) | The percentiles of the canopy height distributions (25th, 50th, 75th and 95th) above 2 m. |
| Mean height (Hmean) | The mean height of all points after normalized. | |
| Coefficient of variation of heights (Hcv) | Coefficient of variation of heights of non-ground LiDAR returns above 2 m. | |
| Kurtosis height (Hkur) | The kurtosis of the heights of all points. | |
| Density-based | Canopy return density (D3, D5, D7, D9) | The proportion of points above the height percentiles (30th, 50th, 70th and 90th). |
| Canopy volume | Canopy cover above 1.3 m (C1.3 m) | Percentages of LiDAR returns above 1.3 m. |
| Forest Type | Field Plot Density (Tree∙ha−1) | Number of Field Surveyed Trees | Number of Segmented Trees * | Leaf-Off Dataset | Leaf-On Dataset | The Fused Dataset | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TP | FP | FN | TP | FP | FN | TP | FP | FN | ||||
| LPF | 633 | 38 | 35/38/36 | 30 | 5 | 8 | 33 | 5 | 5 | 32 | 4 | 6 |
| 1250 | 74 | 68/70/67 | 58 | 10 | 16 | 60 | 10 | 14 | 58 | 9 | 16 | |
| 933 | 56 | 51/46/58 | 43 | 8 | 13 | 41 | 5 | 15 | 47 | 11 | 9 | |
| 1383 | 83 | 75/75/84 | 67 | 8 | 16 | 69 | 6 | 14 | 75 | 9 | 8 | |
| MBF | 1167 | 70 | 76/73/63 | 46 | 30 | 24 | 45 | 28 | 25 | 49 | 14 | 21 |
| 1033 | 62 | 50/54/54 | 37 | 13 | 25 | 37 | 17 | 25 | 42 | 12 | 20 | |
| 717 | 43 | 37/39/48 | 26 | 11 | 17 | 26 | 13 | 17 | 34 | 14 | 9 | |
| MBCF | 750 | 45 | 42/41/49 | 30 | 12 | 15 | 28 | 13 | 17 | 36 | 13 | 9 |
| 817 | 49 | 41/49/49 | 30 | 11 | 19 | 30 | 19 | 19 | 35 | 14 | 14 | |
| 767 | 46 | 46/45/44 | 31 | 15 | 15 | 30 | 15 | 16 | 33 | 11 | 13 | |
| MOF | 1083 | 65 | 49/58/58 | 36 | 13 | 29 | 38 | 20 | 27 | 43 | 15 | 22 |
| 967 | 58 | 44/44/49 | 31 | 13 | 27 | 33 | 11 | 25 | 39 | 10 | 19 | |
| 1100 | 66 | 49/48/53 | 36 | 13 | 30 | 35 | 13 | 31 | 42 | 11 | 24 | |
| 1133 | 68 | 57/51/57 | 38 | 19 | 30 | 36 | 15 | 32 | 43 | 14 | 25 | |
| 1017 | 61 | 43/49/50 | 34 | 9 | 27 | 34 | 15 | 27 | 38 | 12 | 23 | |
| Reference | Forest Type | Stem Density (Tree·ha−1) | Segmentation Algorithm | Accuracy (%) | Evaluation Method |
|---|---|---|---|---|---|
| Koch et al. (2006) [20] | Conifer, broadleaved | 457 | Watershed | 61.7 | Manual to automated recognition accuracy |
| Jing et al. (2012) [30] | Conifer, broadleaved | 398 | Watershed | 69.0 | Commission, omission |
| Smits et al. (2012) [48] | Conifer, broadleaved | 560 | Local maxima | 87.5 | Detection |
| Ayrey et al. (2017) [25] | Conifer, broadleaved | 737 | Layer stacking segmentation | 72.0 | Detection, commission, omission |
| Tochon et al. (2015) [31] | Conifer, broadleaved | -- | Watershed | 69.9 | Detection, under-segmentation, over-segmentation, miss |
| Lu et al. (2014) [8] | Broadleaved | 238 | Bottom-up region growing | 84.0 | F-score |
| Yang et al. (2019) [37] | Conifer, broadleaved | 330 | Watershed, Point cloud segmentation, Layer stacking segmentation | 75.5 | F-score |
| Wu et al. (2019) [28] | Broadleaved | 561 | Watershed, Point cloud segmentation, Polynomial fitting | 80.3 | F-score |
| Dai et al. (2018) [27] | Broadleaved | 436 | Mean shift segmentation | 82.5 | Detection rate |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Gao, T.; Zhu, J.; Wu, F.; Li, X.; Lu, D.; Yu, F. Individual Tree Segmentation and Tree Height Estimation Using Leaf-Off and Leaf-On UAV-LiDAR Data in Dense Deciduous Forests. Remote Sens. 2022, 14, 2787. https://doi.org/10.3390/rs14122787
Chen Q, Gao T, Zhu J, Wu F, Li X, Lu D, Yu F. Individual Tree Segmentation and Tree Height Estimation Using Leaf-Off and Leaf-On UAV-LiDAR Data in Dense Deciduous Forests. Remote Sensing. 2022; 14(12):2787. https://doi.org/10.3390/rs14122787
Chicago/Turabian StyleChen, Qingda, Tian Gao, Jiaojun Zhu, Fayun Wu, Xiufen Li, Deliang Lu, and Fengyuan Yu. 2022. "Individual Tree Segmentation and Tree Height Estimation Using Leaf-Off and Leaf-On UAV-LiDAR Data in Dense Deciduous Forests" Remote Sensing 14, no. 12: 2787. https://doi.org/10.3390/rs14122787