
The Multisource Vegetation Inventory (MVI): A Satellite-Based Forest Inventory for the Northwest Territories Taiga Plains

 , , , and
, , , and
Abstract
:
1. Introduction
2. Materials
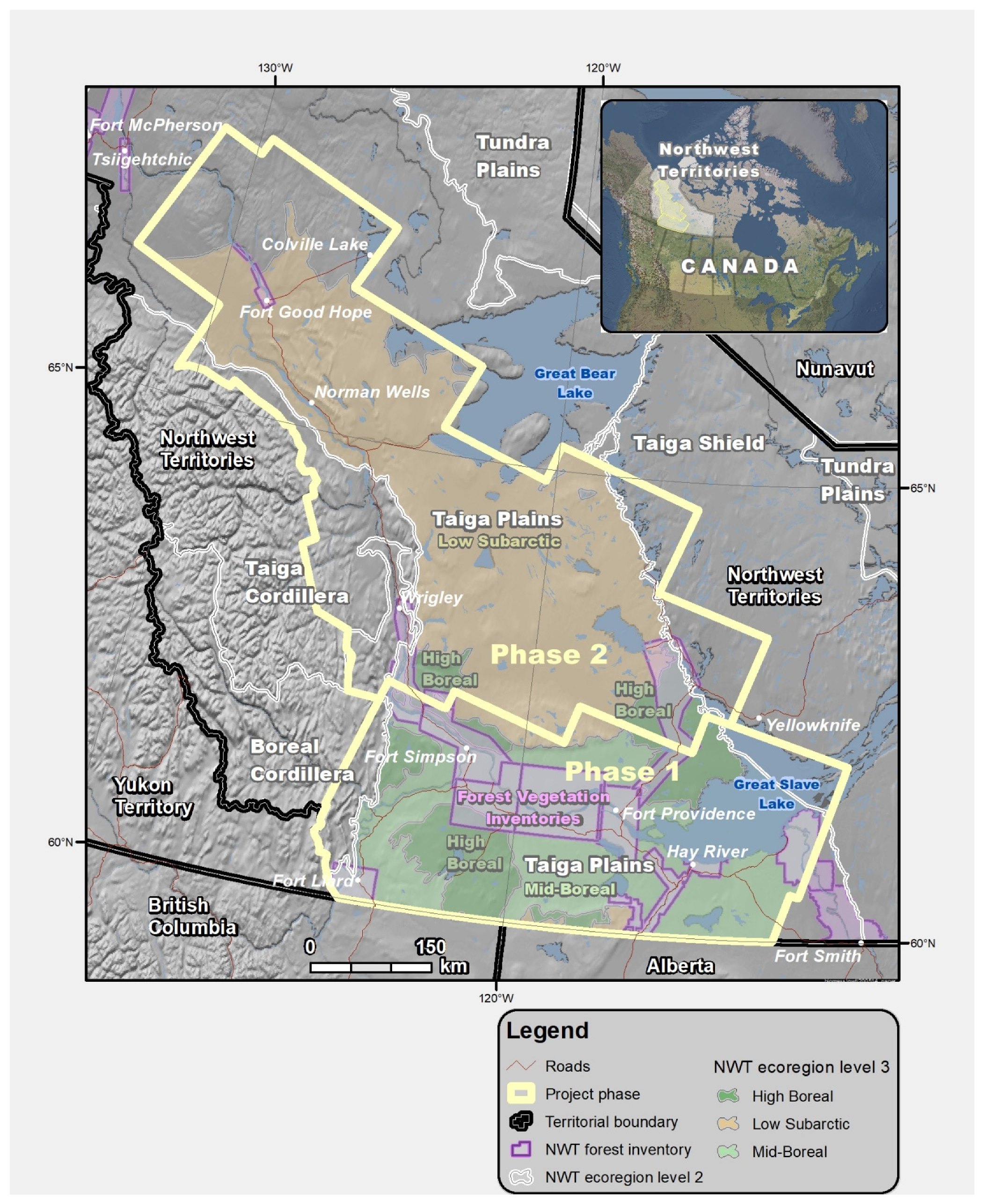
2.1. Study Area
2.2. Stand-Level Attributes from Field Plot Data
- Broad forest type (conifer, broadleaf, mixedwood), derived from individual tree diameter and species of each of the trees in the plot: conifer was chosen if at least 75% of the basal area (BA, the sum of the cross section of stems in the plot) corresponded to conifer trees; broadleaf for plots where 75% of BA came from broadleaf trees; and mixedwood otherwise.
- Stand height (average height in metres (m) of dominant and codominant live trees, i.e., trees with height ≥ Lorey’s height, where Lorey’s height is the weighted (by stem cross section) mean height of all trees with diameter at breast height (DBH) ≥ 5 cm and taller than 1.3 m);
- Crown closure (percent tree cover);
- Stand volume (sum of volume inside bark of the boles of live trees with height ≥ Lorey’s height, in m3/ha);
- Total volume (sum of volume inside bark of the boles of all live trees with DBH ≥ 5 cm and taller than 1.3 m, in m3/ha);
- Aboveground biomass (total dry mass in t/ha of whole live trees with DBH ≥ 5 cm and taller than 1.3 m, including branches and leaves and excluding roots; hereafter referred to as AGB); and
- Stand age (mean age of the dominant and codominant trees in the stand at the reference year of the map, discounting the time it took the trees to reach 1.3 m, the height where the cores were extracted).
2.3. Airborne Laser Scanning Data
2.4. Satellite Data
2.5. Ancillary Data
3. Methods
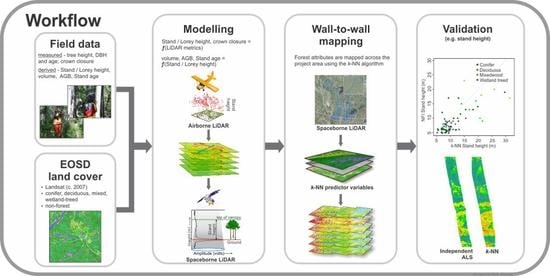
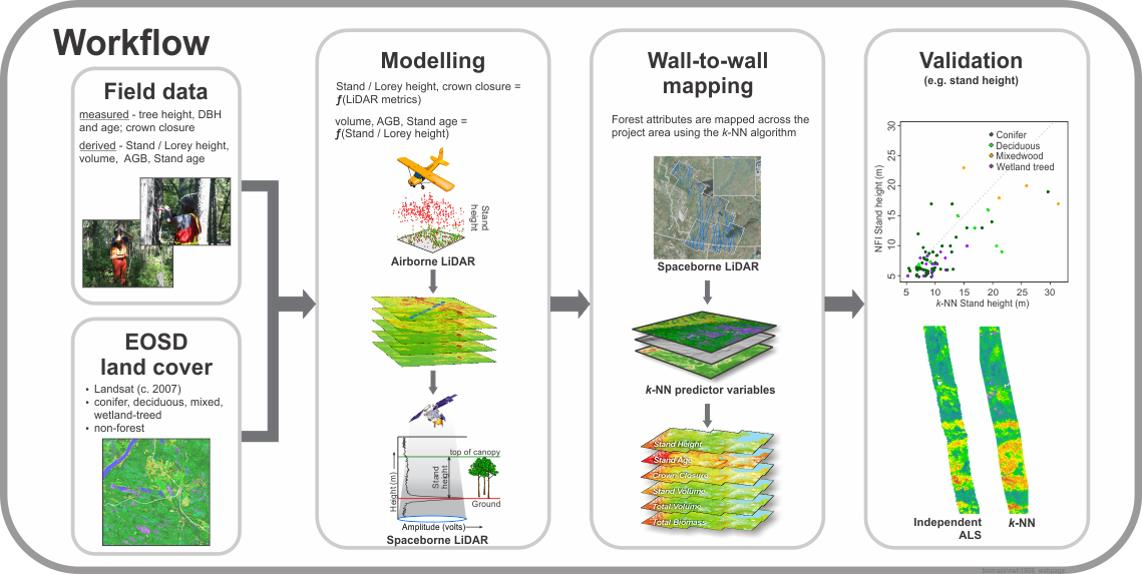
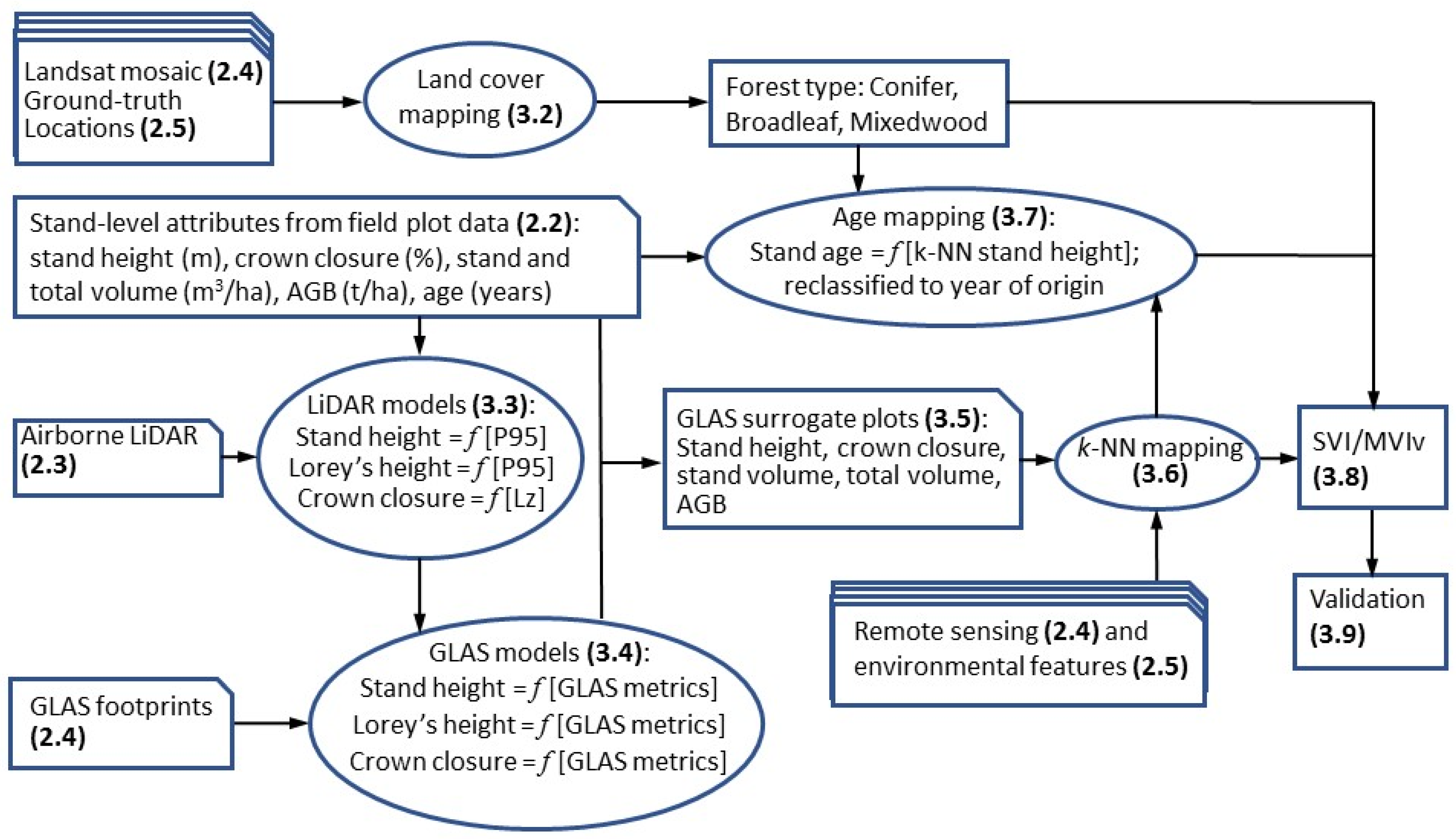
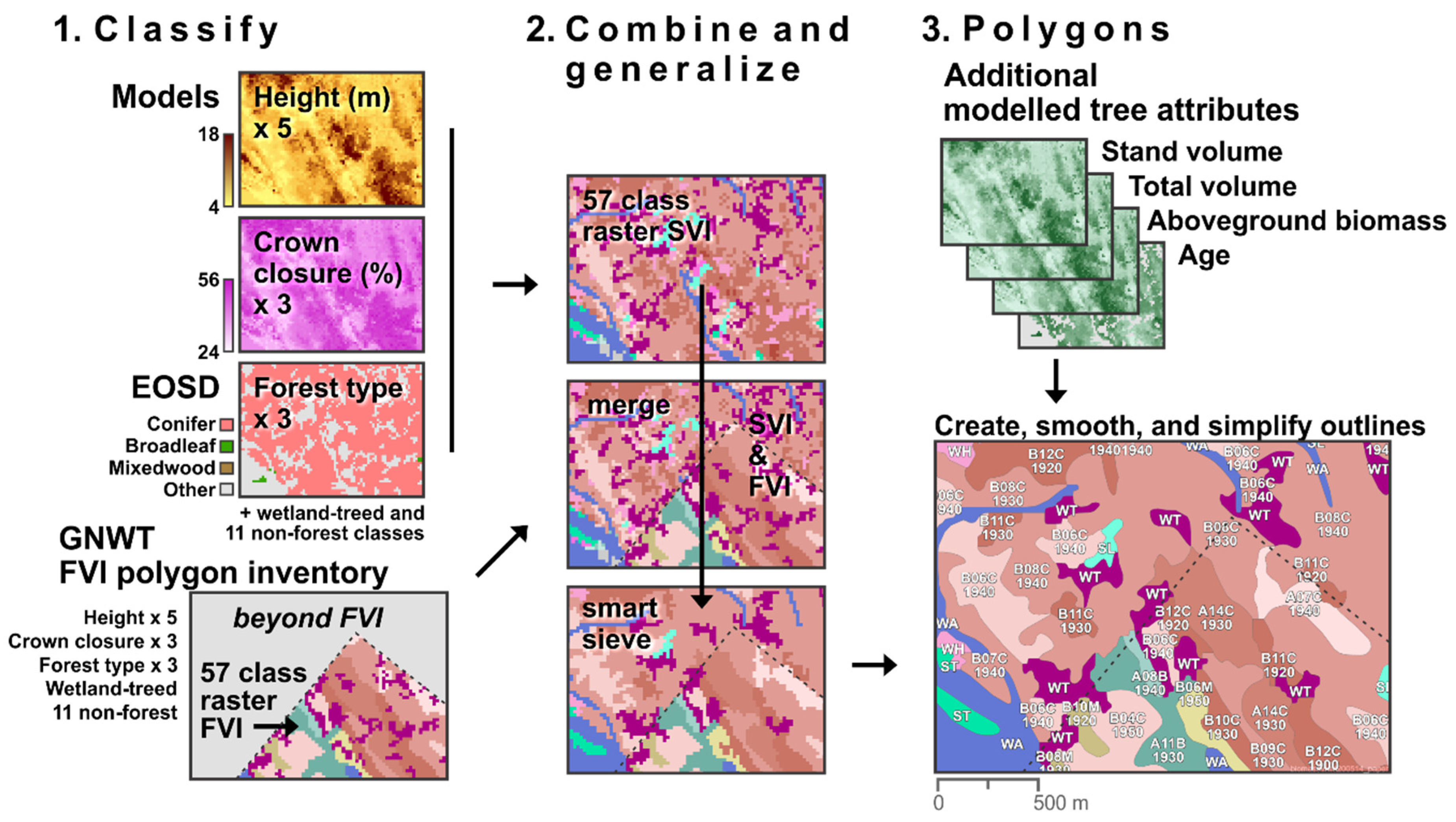
3.1. General Framework
3.2. Landcover Mapping
3.3. Airborne Laser Scanning Models
3.4. GLAS Models
3.5. Surrogate Plot Dataset
3.6. k-NN Attribute Mapping
3.7. Stand Age and Stand Origin
3.8. MVI Polygon Layer
3.9. Validation of Forest Attributes
4. Results
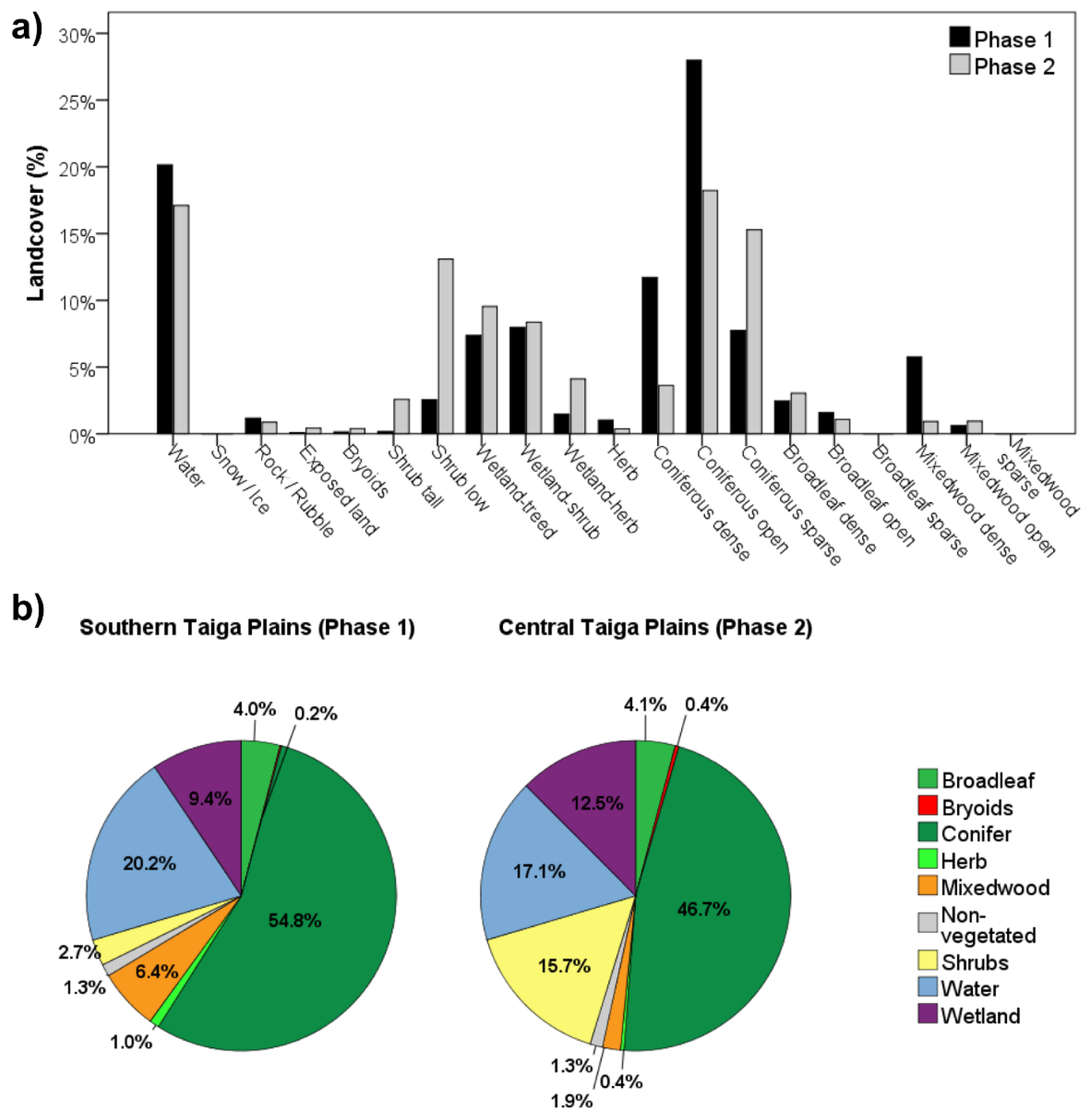
4.1. Landcover Maps
4.2. Models
4.3. Surrogate Forest Inventory Plot Dataset
4.4. Satellite Vegetation Inventory (SVI, Also Known as Forest Attribute Rasters)
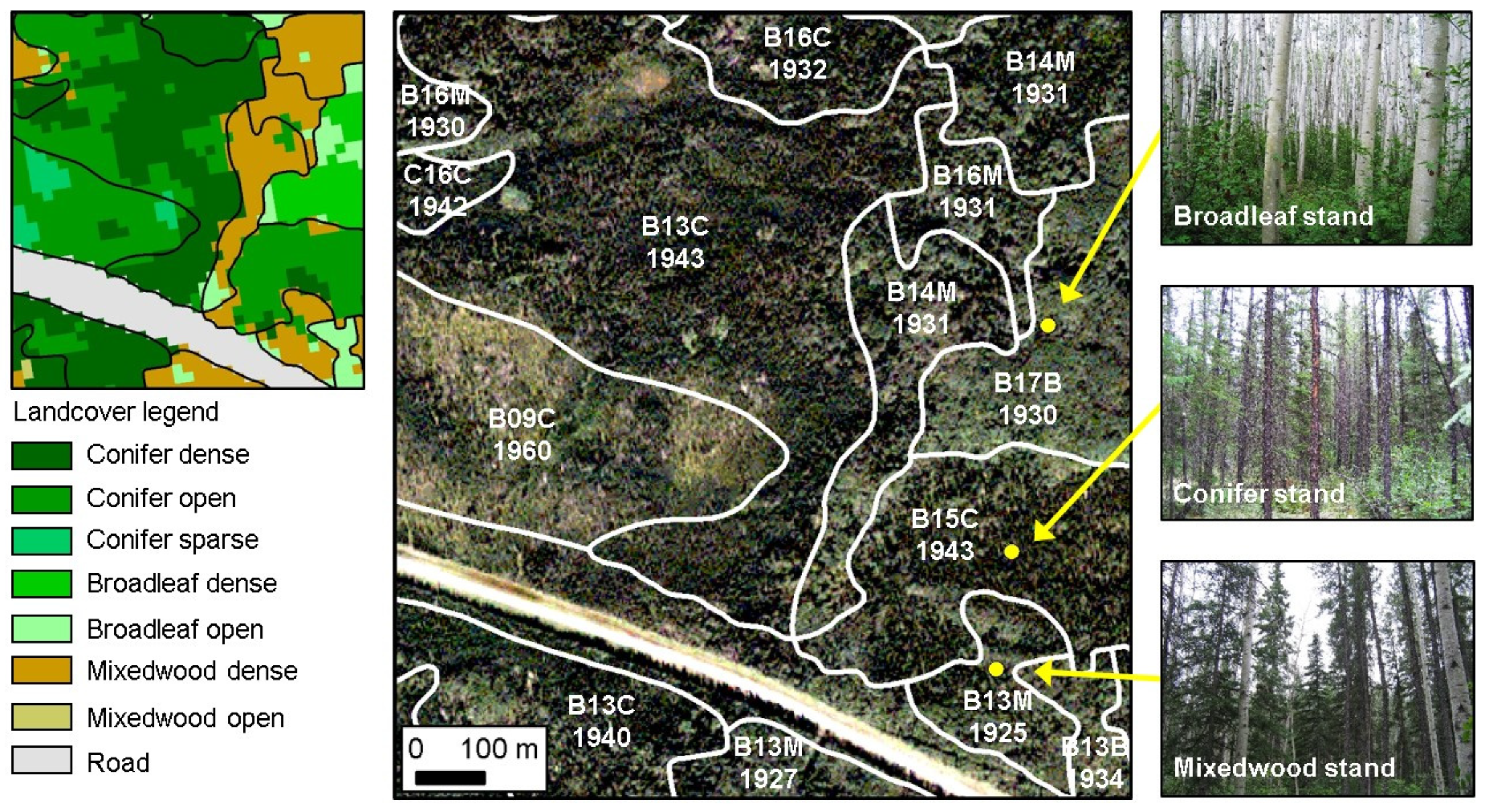
4.5. MVI Polygon Layer
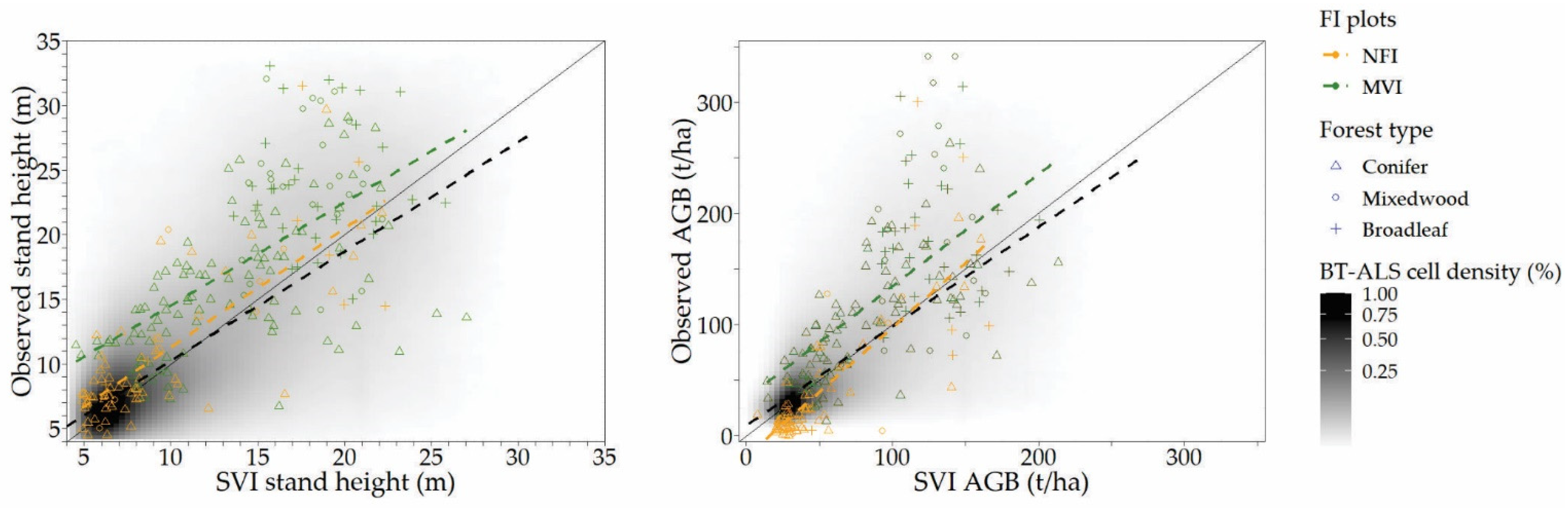
4.6. Validation
5. Discussion
5.1. Contributions
- (1)
- A more consistent and accurate satellite landcover map was developed for this project by partitioning the project area into mapping zones separated along the major hydrological features, where the Landsat data for the different zones were calibrated using the same MODIS data. Undertaking classification within a zone helped to produce a more seamless and spatially continuous product [51] than one based on individual Landsat scenes that are then subsequently merged. Successful technology transfer through a training workshop and ongoing support from the CFS has enabled GNWT to undertake landcover mapping in Phase 2 using methods developed in this study.
- (2)
- Field sampling plots established in the MVI project following National Forest Inventory standards were adopted by GNWT into their permanent sample plot network.
- (3)
- A scaling approach was devised, tested, and published [8], which incorporated multisource data from field plots, airborne and satellite LiDAR. The k-nearest neighbour mapping method in [8] was refined in [37] to enable the addition of a broader set of forest attributes using a multivariate k-NN process. How to validate the products at various stages was also a subject of considerable effort and value (validation report in Supplementary Materials).
- (4)
- The incorporation of free archived satellite L-band PALSAR data with Landsat, digital elevation, and climate datasets resulted in substantially improved estimates of forest structure through the synergy of optical and radar data [37]. In particular, RMSE% values were about 15% lower for both stand height and AGB when PALSAR data were employed [37].
- (5)
- A spatial generalization method was developed that converted the set of 30 m pixel estimates of forest attributes into a single GIS layer consisting of polygons with a complex label akin to that of traditional FIs. The layer seamlessly integrates the FVI where available, providing an invaluable synoptic view of the NWT forest resource.
- (6)
- Although a detailed cost analysis was not undertaken, a ballpark estimate based on field and airborne data collection costs and personnel time invested in the MVI project suggest that the overall cost of this inventory amounted to a few cents per hectare. Efforts will be undertaken to derive a more precise cost estimate for the circa 2022 remapping effort, but in any case, it is worth noting that a conventional softcopy inventory covering the same area would cost tens of millions of dollars.
5.2. Comparison with Other Similar Products Now Available in the Area
5.3. Applications
5.4. Study Limitations and Lessons Learned
5.5. Future Work
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gillis, M.D.; Leckie, D.G. Forest Inventory Mapping Procedures across Canada; Forestry Canada Information Rep. PI-X-114; Petawawa National Forestry Institute: Chalk River, ON, Canada, 1993.
- Leckie, D.G.; Gillis, M.D. Forest inventory in Canada with emphasis on map production. For. Chron. 1995, 71, 74–88. [Google Scholar] [CrossRef]
- Hall, R.J. The roles of aerial photographs in forestry remote sensing image analysis. In Remote Sensing of Forest Environments; Wulder, M.A., Franklin, S.E., Eds.; Springer: New York, NY, USA, 2003; pp. 47–75. [Google Scholar]
- Castilla, G.; Hird, J.; Maynes, B.; Crane, D.; Cosco, J.; Schieck, J.; McDermid, G. Broadening modern resource inventories: A new protocol for mapping natural and anthropogenic features. For. Chron. 2013, 89, 681–689. [Google Scholar] [CrossRef] [Green Version]
- Thompson, I.D.; Maher, S.C.; Rouillard, D.P.; Fryxell, J.M.; Baker, J.A. Accuracy of forest inventory mapping: Some implications for boreal forest management. For. Ecol. Manag. 2007, 252, 208–221. [Google Scholar] [CrossRef]
- Fent, L.; Hall, R.J.; Nesby, R.K. Aerial films for forest inventory: Optimizing film parameters. Photogramm. Eng. Remote Sens. 1995, 61, 281–289. [Google Scholar]
- Magnussen, S.; Russo, G. Uncertainty in photo-interpreted forest inventory variables and effects on estimates of error in Canada’s National Forest Inventory. For. Chron. 2012, 88, 439–447. [Google Scholar] [CrossRef] [Green Version]
- Mahoney, C.; Hall, R.J.; Hopkinson, C.; Filiatrault, M.; Beaudoin, A.; Chen, Q.; Mahoney, C.; Hall, R.J.; Hopkinson, C.; Fil-iatrault, M. A Forest Attribute Mapping Framework: A Pilot Study in a Northern Boreal Forest, Northwest Territories, Canada. Remote Sens. 2018, 10, 1338. [Google Scholar] [CrossRef] [Green Version]
- Gerylo, G.R.; Hall, R.J.; Franklin, E.S.; Smith, L. Empirical relations between Landsat TM spectral response and forest stands near Fort Simpson, Northwest Territories, Canada. Can. J. Remote Sens. 2002, 28, 68–79. [Google Scholar] [CrossRef]
- Franklin, S.E.; Hall, R.J.; Smith, L.; Gerylo, G.R. Discrimination of conifer height, age and crown closure classes using Landsat-5 TM imagery in the Canadian Northwest Territories. Int. J. Remote Sens. 2003, 24, 1823–1834. [Google Scholar] [CrossRef]
- Skakun, R.S.; Hall, R.J.; Arsenault, E.; Smith, L.; Cassidy, A.; Lakusta, T.; Beaudoin, A.; Guindon, L. Using multi-sensor satellite imagery to map forest stand attributes in the Mackenzie Valley, NWT. In Proceedings of the International Polar Year GeoNorth Conference, Yellowknife, NWT, Canada, 19–24 August 2007; Available online: https://cfs.nrcan.gc.ca/pubwarehouse/pdfs/27432.pdf (accessed on 1 October 2020).
- Van der Sluijs, J.; Hall, R.J.; Peddle, D.R. Influence of Field-Based Species Composition and Understory Descriptions on Spectral Mixture Analysis of Tree Species in the Northwest Territories, Canada. Can. J. Remote Sens. 2016, 42, 591–609. [Google Scholar] [CrossRef]
- Wulder, M.; White, J.; Cranny, M.; Hall, R.J.; Luther, J.; Beaudoin, A.; Goodenough, D.G.; Dechka, A.J. Monitoring Canada’s forests. Part 1: Completion of the EOSD land cover project. Can. J. Remote Sens. 2008, 34, 549–562. [Google Scholar] [CrossRef]
- Kurz, W.A.; Apps, M.J. Developing Canada’s National Forest Carbon Monitoring, Accounting and Reporting System to Meet the Reporting Requirements of the Kyoto Protocol. Mitig. Adapt. Strat. Glob. Chang. 2006, 11, 33–43. [Google Scholar] [CrossRef]
- Kurz, W.; Shaw, C.; Boisvenue, C.; Stinson, G.; Metsaranta, J.; Leckie, D.; Dyk, A.; Smyth, C.; Neilson, E. Carbon in Canada’s boreal forest—A synthesis. Environ. Rev. 2013, 21, 260–292. [Google Scholar] [CrossRef]
- Tomppo, E.; Katila, M. Satellite image-based national forest inventory of Finland. In Proceedings of the IGARSS 1991 Remote Sensing: Global Monitoring for Earth Management, Espoo, Finland, 3–6 June 1991; pp. 1141–1144. [Google Scholar]
- Nilsson, M. Estimation of Forest Variables Using Satellite Image Data and Airborne Lidar. Ph.D. Thesis, Swedish University of Agricultural Sciences, Umeå, Sweden, 1997. [Google Scholar]
- Hudak, A.T.; Lefsky, M.A.; Cohen, W.B.; Berterretche, M. Integration of lidar and Landsat ETM+ data for estimating and mapping forest canopy height. Remote Sens. Environ. 2002, 82, 397–416. [Google Scholar] [CrossRef] [Green Version]
- Saatchi, S.S.; Harris, N.L.; Brown, S.; Lefsky, M.; Mitchard, E.T.A.; Salas, W.; Zutta, B.R.; Buermann, W.; Lewis, S.L.; Hagen, S.; et al. Benchmark map of forest carbon stocks in tropical regions across three continents. Proc. Natl. Acad. Sci. USA 2011, 108, 9899–9904. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lefsky, M.A. A global forest canopy height map from the Moderate Resolution Imaging Spectroradiometer and the Geoscience Laser Altimeter System. Geophys. Res. Lett. 2010, 37, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Andersen, H.-E.; Strunk, J.; Temesgen, H.; Atwood, D.; Winterberger, K. Using multilevel remote sensing and ground data to estimate forest biomass resources in remote regions: A case study in the boreal forests of interior Alaska. Can. J. Remote Sens. 2011, 37, 596–611. [Google Scholar] [CrossRef]
- Neigh, C.S.; Nelson, R.F.; Ranson, K.J.; Margolis, H.A.; Montesano, P.M.; Sun, G.; Kharuk, V.; Næsset, E.; Wulder, M.; Andersen, H.-E. Taking stock of circumboreal forest carbon with ground measurements, airborne and spaceborne LiDAR. Remote Sens. Environ. 2013, 137, 274–287. [Google Scholar] [CrossRef] [Green Version]
- Nelson, R.; Margolis, H.; Montesano, P.; Sun, G.; Cook, B.; Corp, L.; Andersen, H.-E.; Dejong, B.; Pellat, F.P.; Fickel, T.; et al. Lidar-based estimates of aboveground biomass in the continental US and Mexico using ground, airborne, and satellite observations. Remote Sens. Environ. 2017, 188, 127–140. [Google Scholar] [CrossRef] [Green Version]
- Matasci, G.; Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W.; Zald, H.S.J. Large-area mapping of Canadian boreal forest cover, height, biomass and other structural attributes using Landsat composites and lidar plots. Remote Sens. Environ. 2018, 209, 90–106. [Google Scholar] [CrossRef]
- Luther, J.E.; Fournier, R.A.; Van Lier, O.; Bujold, M. Extending ALS-Based Mapping of Forest Attributes with Medium Resolution Satellite and Environmental Data. Remote Sens. 2019, 11, 1092. [Google Scholar] [CrossRef] [Green Version]
- Hall, R.J.; Skakun, R.S. Mapping forest inventory attributes across coniferous, deciduous and mixed wood stand types in the Northwest Territories from high spatial resolution QuickBird satellite imagery. In Proceedings of the 28th Canadian Symposium on Remote Sensing/American Society for Photogrammetry and Remote Sensing (ASPRS), Ottawa, ON, Canada, 28 October–1 November 2007; Available online: https://cfs.nrcan.gc.ca/pubwarehouse/pdfs/27753.pdf (accessed on 1 October 2020).
- Hall, R.J.; Skakun, R.S.; Beaudoin, A.; Wulder, M.A.; Arsenault, E.J.; Bernier, P.Y.; Guindon, L.; Luther, J.E.; Gillis, M.D. Approaches for forest biomass estimation and mapping in Canada. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010. [Google Scholar] [CrossRef] [Green Version]
- Beaudoin, A.; Bernier, P.Y.; Guindon, L.; Villemaire, P.; Guo, X.J.; Stinson, G.; Bergeron, T.; Magnussen, S.; Hall, R.J. Mapping attributes of Canada’s forests at moderate resolution through kNN and MODIS imagery. Can. J. For. Res. 2014, 44, 521–532. [Google Scholar] [CrossRef] [Green Version]
- Ecosystem Classification Group. Ecological Regions of the Northwest Territories–Taiga Plains; Department of Environment and Natural Resources, Government of the Northwest Territories: Yellowknife, NT, Canada, 2007. Available online: https://www.enr.gov.nt.ca/sites/enr/files/resources/taiga_plains_ecological_land_classification_report.pdf (accessed on 1 October 2020).
- National Forest Inventory. Canada’s National Forest Inventory Estimation Procedures; Canadian Council of Forest Ministers: Ottawa, ON, Canada, 2004. Available online: https://nfi.nfis.org/resources/estimation/Estimation_procedures_v1.13.pdf (accessed on 1 October 2020).
- Ung, C.-H.; Bernier, P.; Guo, X.-J. Canadian national biomass equations: New parameter estimates that include British Columbia data. Can. J. For. Res. 2008, 38, 1123–1132. [Google Scholar] [CrossRef]
- Zhu, Z.; Wulder, M.; Roy, D.P.; Woodcock, C.E.; Hansen, M.C.; Radeloff, V.C.; Healey, S.P.; Schaaf, C.; Hostert, P.; Strobl, P.; et al. Benefits of the free and open Landsat data policy. Remote Sens. Environ. 2019, 224, 382–385. [Google Scholar] [CrossRef]
- Olthof, I.; Butson, C.; Fernandes, R.; Fraser, R.; Latifovic, R.; Orazietti, J. Landsat ETM+ mosaic of northern Canada. Can. J. Remote Sens. 2005, 31, 412–419. [Google Scholar] [CrossRef]
- Olthof, I.; Pouliot, D.; Fernandes, R.; Latifovic, R. Landsat-7 ETM+ radiometric normalization comparison for northern mapping applications. Remote Sens. Environ. 2005, 95, 388–398. [Google Scholar] [CrossRef]
- Luo, Y.; Trishchenko, A.; Khlopenkov, K. Developing clear-sky, cloud and cloud shadow mask for producing clear-sky composites at 250-meter spatial resolution for the seven MODIS land bands over Canada and North America. Remote Sens. Environ. 2008, 112, 4167–4185. [Google Scholar] [CrossRef]
- Guindon, L.; Bernier, P.; Gauthier, S.; Stinson, G.; Villemaire, P.; Beaudoin, A. Missing forest cover gains in boreal forests explained. Ecosphere 2018, 9, e02094. [Google Scholar] [CrossRef] [Green Version]
- Beaudoin, A.; Hall, R.J.; Filiatrault, M.; Villemaire, P.; Castilla, G.; Skakun, R.; Guindon, L. Improved k-NN mapping of forest attributes in northern Canada using spaceborne L-band SAR, multispectral and LiDAR data. Remote Sens. 2022, 14, 1181. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [Green Version]
- Hogg, E.; Barr, A.; Black, T. A simple soil moisture index for representing multi-year drought impacts on aspen productivity in the western Canadian interior. Agric. For. Meteorol. 2013, 178–179, 173–182. [Google Scholar] [CrossRef] [Green Version]
- Hopkinson, C.; Wulder, M.; Coops, N.; Milne, T.; Fox, A.; Bater, C. Airborne lidar sampling of the Canadian boreal forest: Planning, execution & initial processing. In Proceedings of the 11th International Conference on LiDAR Applications for Assessing Forest Ecosystems, SilviLaser 2011, Hobart, Australia, 16–20 October 2011; Available online: http://scholar.ulethbridge.ca/sites/default/files/hopkinson/files/hopkinson_silvilaser_2011_canada_boreal_lidar.pdf (accessed on 1 October 2020).
- Wulder, M.A.; White, J.; Bater, C.W.; Coops, N.; Hopkinson, C.; Chen, G. Lidar plots—a new large-area data collection option: Context, concepts, and case study. Can. J. Remote Sens. 2012, 38, 600–618. [Google Scholar] [CrossRef]
- Tou, J.T.; Gonzalez, R.C. Pattern Recognition Principles; Addison-Wesley Publishing Co.: London, UK, 1974. [Google Scholar]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices, 2nd ed.; Lewis Publishers: Boca Raton, FL, USA, 2009. [Google Scholar]
- McRoberts, E.R.; Nelson, M.D.; Wendt, D.G. Stratified estimation of forest area using satellite imagery, inventory data, and the k-Nearest Neighbors technique. Remote Sens. Environ. 2002, 82, 457–468. [Google Scholar] [CrossRef]
- McRoberts, R.E. Estimating forest attribute parameters for small areas using nearest neighbors techniques. For. Ecol. Manag. 2012, 272, 3–12. [Google Scholar] [CrossRef]
- Beaudoin, A.; Bernier, P.; Villemaire, P.; Guindon, L.; Guo, X.J. Tracking forest attributes across Canada between 2001 and 2011 using a k nearest neighbors mapping approach applied to MODIS imagery. Can. J. For. Res. 2018, 48, 85–93. [Google Scholar] [CrossRef] [Green Version]
- Crookston, N.L.; Finley, A.O. yaImpute: AnRPackage forkNN Imputation. J. Stat. Softw. 2008, 23, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Government of Northwest Territories. Northwest Territories Forest Vegetation Inventory Standards with Softcopy Supplements, v4.0; Technical Report; Government of Northwest Territories: Yellowknife, NT, Canada, 2012.
- McMullin, R.T.; Thompson, I.D.; Lacey, B.W.; Newmaster, S.G. Estimating the biomass of woodland caribou forage lichens. Can. J. For. Res. 2011, 41, 1961–1969. [Google Scholar] [CrossRef]
- DeMars, C.; Hodson, J.; Kelly, A.; Lamontagne, E.; Smith, L.; Groenewegen, K.; Davidson, T.; Behrens, S.; Cluff, D.; Gurarie, E. Influence of landcover, fire and human disturbance on habitat selection by boreal caribou in the NWT. Report prepared for Project 202 of the Government of the Northwest Territories Department of Environment and Natural Resources, Northwest Territories Cumulative Impact Monitoring Program. 2021; unpublished work. [Google Scholar]
- Olthof, I.; Latifovic, R.; Pouliot, D. Development of a circa 2000 land cover map of northern Canada at 30 m resolution from Landsat. Can. J. Remote Sens. 2009, 35, 152–165. [Google Scholar] [CrossRef]
- Corona, P. Integration of forest mapping and inventory to support forest management. iFores–Biogeosci. For. 2010, 3, 59–64. [Google Scholar] [CrossRef] [Green Version]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar Sampling for Large-Area Forest Characterization: A Review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef] [Green Version]
- Baccini, A.; Walker, W.; Carvalho, L.; Farina, M.; Sulla-Menashe, D.; Houghton, R.A. Tropical forests are a net carbon source based on aboveground measurements of gain and loss. Science 2017, 358, 230–234. [Google Scholar] [CrossRef] [Green Version]
- Duncanson, L.; Neuenschwander, A.; Hancock, S.; Thomas, N.; Fatoyinbo, T.; Simard, M.; Silva, C.A.; Armston, J.; Luthcke, S.B.; Hofton, M.; et al. Biomass estimation from simulated GEDI, ICESat-2 and NISAR across environmental gradients in Sonoma County, California. Remote Sens. Environ. 2020, 242, 111779. [Google Scholar] [CrossRef]
- Wang, J.A.; Baccini, A.; Farina, M.; Randerson, J.T.; Friedl, M.A. Disturbance suppresses the aboveground carbon sink in North American boreal forests. Nat. Clim. Chang. 2021, 11, 435–441. [Google Scholar] [CrossRef]
- Margolis, H.A.; Nelson, R.F.; Montesano, P.M.; Beaudoin, A.; Sun, G.; Andersen, H.-E.; Wulder, M.A. Combining satellite lidar, airborne lidar, and ground plots to estimate the amount and distribution of aboveground biomass in the boreal forest of North America. Can. J. For. Res. 2015, 45, 838–855. [Google Scholar] [CrossRef] [Green Version]
- Boisvenue, C.; Smiley, B.P.; White, J.C.; Kurz, W.A.; Wulder, M.A. Improving carbon monitoring and reporting in forests using spatially-explicit information. Carbon Balance Manag. 2016, 11, 23. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, S.; Ni-Meister, W.; Yang, W.; Chen, Q. Physically based vertical vegetation structure retrieval from ICESat data: Validation using LVIS in White Mountain National Forest, New Hampshire, USA. Remote Sens. Environ. 2011, 115, 2776–2785. [Google Scholar] [CrossRef]
- Nelson, R. Model effects on GLAS-based regional estimates of forest biomass and carbon. Int. J. Remote Sens. 2010, 31, 1359–1372. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Gynan, C.; Mahoney, C.; Sitar, M. Multisensor and Multispectral LiDAR Characterization and Classification of a Forest Environment. Can. J. Remote Sens. 2016, 42, 501–520. [Google Scholar] [CrossRef]
- Dalponte, M.; Ene, L.T.; Gobakken, T.; Næsset, E.; Gianelle, D. Predicting Selected Forest Stand Characteristics with Multispectral ALS Data. Remote. Sens. 2018, 10, 586. [Google Scholar] [CrossRef] [Green Version]
- Goodbody, T.; Tompalski, P.; Coops, N.; Hopkinson, C.; Treitz, P.; Van Ewijk, K. Forest Inventory and Diversity Attribute Modelling Using Structural and Intensity Metrics from Multi-Spectral Airborne Laser Scanning Data. Remote Sens. 2020, 12, 2109. [Google Scholar] [CrossRef]
- Okhrimenko, M.; Coburn, C.; Hopkinson, C. Multi-Spectral Lidar: Radiometric Calibration, Canopy Spectral Reflectance, and Vegetation Vertical SVI Profiles. Remote Sens. 2019, 11, 1556. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Suganthan, P.N. Random Forests with ensemble of feature spaces. Pattern Recognit. 2014, 47, 3429–3437. [Google Scholar] [CrossRef]
- Ayrey, E.; Hayes, D.J. The Use of Three-Dimensional Convolutional Neural Networks to Interpret LiDAR for Forest Inventory. Remote Sens. 2018, 10, 649. [Google Scholar] [CrossRef] [Green Version]
- Neuenschwander, A.L.; Magruder, L.A. Canopy and Terrain Height Retrievals with ICESat-2: A First Look. Remote Sens. 2019, 11, 1721. [Google Scholar] [CrossRef] [Green Version]
- Neuenschwander, A.; Guenther, E.; White, J.C.; Duncanson, L.; Montesano, P. Validation of ICESat-2 terrain and canopy heights in boreal forests. Remote Sens. Environ. 2020, 251, 112110. [Google Scholar] [CrossRef]
- Puliti, S.; Hauglin, M.; Breidenbach, J.; Montesano, P.; Neigh, C.; Rahlf, J.; Solberg, S.; Klingenberg, T.; Astrup, R. Modelling above-ground biomass stock over Norway using national forest inventory data with ArcticDEM and Sentinel-2 data. Remote Sens. Environ. 2019, 236, 111501. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Axelsson, A.; Lindberg, E.; Olsson, H. Exploring Multispectral ALS Data for Tree Species Classification. Remote Sens. 2018, 10, 183. [Google Scholar] [CrossRef] [Green Version]
- Budei, B.C.; St-Onge, B.; Hopkinson, C.; Audet, F.-A. Identifying the genus or species of individual trees using a three-wavelength airborne lidar system. Remote Sens. Environ. 2018, 204, 632–647. [Google Scholar] [CrossRef]
- Kukkonen, M.; Maltamo, M.; Korhonen, L.; Packalen, P. Multispectral Airborne LiDAR Data in the Prediction of Boreal Tree Species Composition. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3462–3471. [Google Scholar] [CrossRef]
- Fraser, R.H.; Van der Sluijs, J.; Hall, R.J. Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada. Remote Sens. 2017, 9, 279. [Google Scholar] [CrossRef] [Green Version]
- Van Der Sluijs, J.; Kokelj, S.V.; Fraser, R.H.; Tunnicliffe, J.; Lacelle, D. Permafrost Terrain Dynamics and Infrastructure Impacts Revealed by UAV Photogrammetry and Thermal Imaging. Remote Sens. 2018, 10, 1734. [Google Scholar] [CrossRef] [Green Version]
- Van Der Sluijs, J.; Mackay, G.; Andrew, L.; Smethurst, N.; Andrews, T.D. Archaeological documentation of wood caribou fences using unmanned aerial vehicle and very high-resolution satellite imagery in the Mackenzie Mountains, Northwest Territories. J. Unmanned Veh. Syst. 2020, 8, 186–206. [Google Scholar] [CrossRef]
- Wagers, S.; Castilla, G.; Filiatrault, M.; Sanchez-Azofeifa, A. Using TLS-measured Tree Attributes to Estimate Aboveground Biomass in Small Black Spruce Trees. Forests 2021, 12, 1521. [Google Scholar] [CrossRef]
- Bona, K.A.; Shaw, C.; Thompson, D.K.; Hararuk, O.; Webster, K.; Zhang, G.; Voicu, M.; Kurz, W.A. The Canadian model for peatlands (CaMP): A peatland carbon model for national greenhouse gas reporting. Ecol. Model. 2020, 431, 109164. [Google Scholar] [CrossRef]
- Gillis, M.D.; Omule, A.Y.; Brierley, T. Monitoring Canada’s forests: The National Forest Inventory. For. Chron. 2005, 81, 214–221. [Google Scholar] [CrossRef]
- Natural Resources Canada. Canada’s National Forest Inventory Ground Sampling Guidelines, Version 5.0. Natural Resources Canada, Canadian Forest Service. 2008. Available online: https://nfi.nfis.org/en/ground_plot (accessed on 27 November 2020).
- McRoberts, R.E. Diagnostic tools for nearest neighbors techniques when used with satellite imagery. Remote Sens. Environ. 2009, 113, 489–499. [Google Scholar] [CrossRef]
- Lambert, M.-C.; Ung, C.-H.; Raulier, F. Canadian national tree aboveground biomass equations. Can. J. For. Res. 2005, 35, 1996–2018. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Luther, J.E.; Strickland, G.; Remmel, T.K.; Mitchell, S.W. Use of vector polygons for the accuracy assessment of pixel-based landcover maps. Can. J. Remote Sens. 2006, 32, 268–279. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MVI Attribute | Classes | No. of Classes |
|---|---|---|
| Landcover: upland forest 1,2 | Conifer, broadleaf, mixedwood | 3 |
| Stand height 1 | 1–6 m, 7–10 m, 11–15 m, 16–20 m, 21 m+ | 5 |
| Crown closure 1 | A: 10%–25%, B: 26%–55%, C: 56%–100% | 3 |
| Landcover: wetland treed 2 | Wetland treed | 1 |
| Landcover: non-treed 2 | Shrub tall, shrub low, herb, bryoid, wetland shrub, wetland herb | 6 |
| Landcover: nonvegetated 2 | Water, exposed rock, barren, roadway, other | 5 |
| Forest Attribute (y) | Units | Model Form | Parameters | Adj. R2 | RMSE | |
|---|---|---|---|---|---|---|
| a | b | |||||
| Stand height | m | HT = a + b P95 | 0.53 | 0.96 | 0.89 | 1.4 |
| Lorey’s height | m | HL = a + b P95 | 0.64 | 0.84 | 0.89 | 1.2 |
| Crown closure | % | CC = aLzb | 62.78 | 0.25 | 0.63 | 4.8 |
| Forest Attribute (y) | Units | Model Form | Parameters | Adj. R2 | RMSE | |
|---|---|---|---|---|---|---|
| a | b | |||||
| Stand height | m | HTGLAS = a + b P85 | 2.30 | 1.10 | 0.88 | 1.3 |
| Lorey’s height | m | HLGLAS = a + b P85 | 2.46 | 0.91 | 0.89 | 1.1 |
| Crown closure | % | CCGLAS = aLzb | 64.63 | 0.25 | 0.54 | 6.5 |
| Forest Attribute (y) | Units | Predictor | Parameters | Adj. R2 | RMSE | |
|---|---|---|---|---|---|---|
| x | a | b | ||||
| Stand volume | m3/ha | Stand height | 0.61 | 1.84 | 0.76 | 46.8 |
| Total volume | m3/ha | Lorey’s height | 1.84 | 1.69 | 0.81 | 59.3 |
| AGB | t/ha | Lorey’s height | 2.27 | 1.45 | 0.76 | 35.7 |
| Forest Attribute (y) | Adj R2 a | RMSE b | Bias c | SD d |
|---|---|---|---|---|
| Stand volume | 0.76 | 46.7 | 0.83 | 46.5 |
| Total volume | 0.81 | 59.2 | 1.42 | 59.3 |
| AGB | 0.76 | 35.6 | 0.28 | 35.5 |
| Forest Type | Parameters | Adj. | RMSE | |
|---|---|---|---|---|
| a | b | R2 | (Years) | |
| Low-productivity zone | ||||
| Conifer (n = 33) | 33.78 | 0.39 | 0.48 | 12 |
| Broadleaf (n = 25) | 1.82 | 1.28 | 0.70 | 12 |
| Mixedwood (n = 27) | 18.30 | 0.57 | 0.57 | 9 |
| High-productivity zone | ||||
| Conifer (n = 20) | 48.78 | 0.34 | 0.61 | 14 |
| Broadleaf (n = 16) | 8.53 | 0.78 | 0.57 | 20 |
| Mixedwood (n = 11) | 8.63 | 0.87 | 0.75 | 19 |
| Forest Type | Adj R2 | RMSE (Years) | Bias (Years) | SD |
|---|---|---|---|---|
| Low-productivity zone | ||||
| Conifer | 0.48 | 12 | 0.1 | 12.8 |
| Broadleaf | 0.72 | 12 | 1.0 | 11.1 |
| Mixedwood | 0.57 | 8 | 0.1 | 7.1 |
| High-productivity zone | ||||
| Conifer | 0.50 | 15 | −2.0 | 15.4 |
| Broadleaf | 0.57 | 19 | 0.5 | 11.3 |
| Mixedwood | 0.70 | 19 | 2.7 | 11.5 |
| Forest Attribute | P1 a | P99 b | Mean | Median | SD c | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Phase 1 | Phase 2 | Phase 1 | Phase 2 | Phase 1 | Phase 2 | Phase 1 | Phase 2 | Phase 1 | Phase 2 | |
| Stand height (m) | 4.1 | 4.1 | 31.1 | 20.4 | 10.1 | 7.0 | 8.1 | 6.1 | 5.9 | 3.0 |
| Crown closure (%) | 22.3 | 21.9 | 66.2 | 64.6 | 41.1 | 36.3 | 40.3 | 34.9 | 10.3 | 9.0 |
| Total volume (m3/ha) | 20.0 | 18.8 | 455.2 | 231.2 | 87.4 | 45.2 | 53.9 | 33.8 | 87.5 | 37.2 |
| Stand volume (m3/ha) | 8.1 | 8.2 | 340.6 | 157.2 | 54.2 | 24.8 | 28.6 | 17.0 | 65.4 | 26.0 |
| Aboveground biomass (t/ha) | 2.5 | 16.7 | 256.8 | 128.4 | 54.8 | 33.0 | 36.8 | 27.6 | 50.4 | 20.7 |
| Forest Attribute | P1 a | P99 b | Mean | Median | SD c | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mid Boreal | High Boreal | Low Subarctic | Mid Boreal | High Boreal | Low Subarctic | Mid Boreal | High Boreal | Low Subarctic | Mid Boreal | High Boreal | Low Subarctic | Mid Boreal | High Boreal | Low Subarctic | |
| Stand height (m) | 4 | 4 | 4 | 22 | 20 | 11 | 9.8 | 8.5 | 6.5 | 9 | 7 | 6 | 4.5 | 3.4 | 1.6 |
| Crown closure (%) | 22 | 25 | 24 | 59 | 57 | 50 | 40.5 | 39.1 | 34.9 | 41 | 38 | 34 | 8.6 | 7.2 | 5.7 |
| Total volume (m3/ha) | 20 | 23 | 21 | 291 | 248 | 111 | 82.3 | 63.1 | 39.3 | 34 | 60 | 47 | 5.7 | 61 | 44.3 |
| Stand volume (m3/ha) | 8 | 9 | 9 | 207 | 173 | 71 | 50.1 | 36.3 | 20.7 | 33 | 25 | 17 | 44.3 | 31.7 | 12.1 |
| Aboveground biomass (t/ha) | 9 | 11 | 17 | 173 | 152 | 74 | 55.3 | 44.3 | 30.7 | 44 | 36 | 28 | 36.9 | 27.3 | 11.4 |
| Stand age (years) | 17 | 25 | 14 | 134 | 107 | 88 | 77 | 74.1 | 66 | 75 | 73 | 68 | 19.6 | 12.5 | 13.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castilla, G.; Hall, R.J.; Skakun, R.; Filiatrault, M.; Beaudoin, A.; Gartrell, M.; Smith, L.; Groenewegen, K.; Hopkinson, C.; van der Sluijs, J. The Multisource Vegetation Inventory (MVI): A Satellite-Based Forest Inventory for the Northwest Territories Taiga Plains. Remote Sens. 2022, 14, 1108. https://doi.org/10.3390/rs14051108
Castilla G, Hall RJ, Skakun R, Filiatrault M, Beaudoin A, Gartrell M, Smith L, Groenewegen K, Hopkinson C, van der Sluijs J. The Multisource Vegetation Inventory (MVI): A Satellite-Based Forest Inventory for the Northwest Territories Taiga Plains. Remote Sensing. 2022; 14(5):1108. https://doi.org/10.3390/rs14051108
Chicago/Turabian StyleCastilla, Guillermo, Ronald J. Hall, Rob Skakun, Michelle Filiatrault, André Beaudoin, Michael Gartrell, Lisa Smith, Kathleen Groenewegen, Chris Hopkinson, and Jurjen van der Sluijs. 2022. "The Multisource Vegetation Inventory (MVI): A Satellite-Based Forest Inventory for the Northwest Territories Taiga Plains" Remote Sensing 14, no. 5: 1108. https://doi.org/10.3390/rs14051108