
Precise Relative Orbit Determination for Chinese TH-2 Satellite Formation Using Onboard GPS and BDS2 Observations


 and
and
Abstract
:
1. Introduction
2. Data Collection and Quality Evaluation
2.1. TH-2 Satellite Formation System
2.2. Performance of Onboard GNSS Receiver
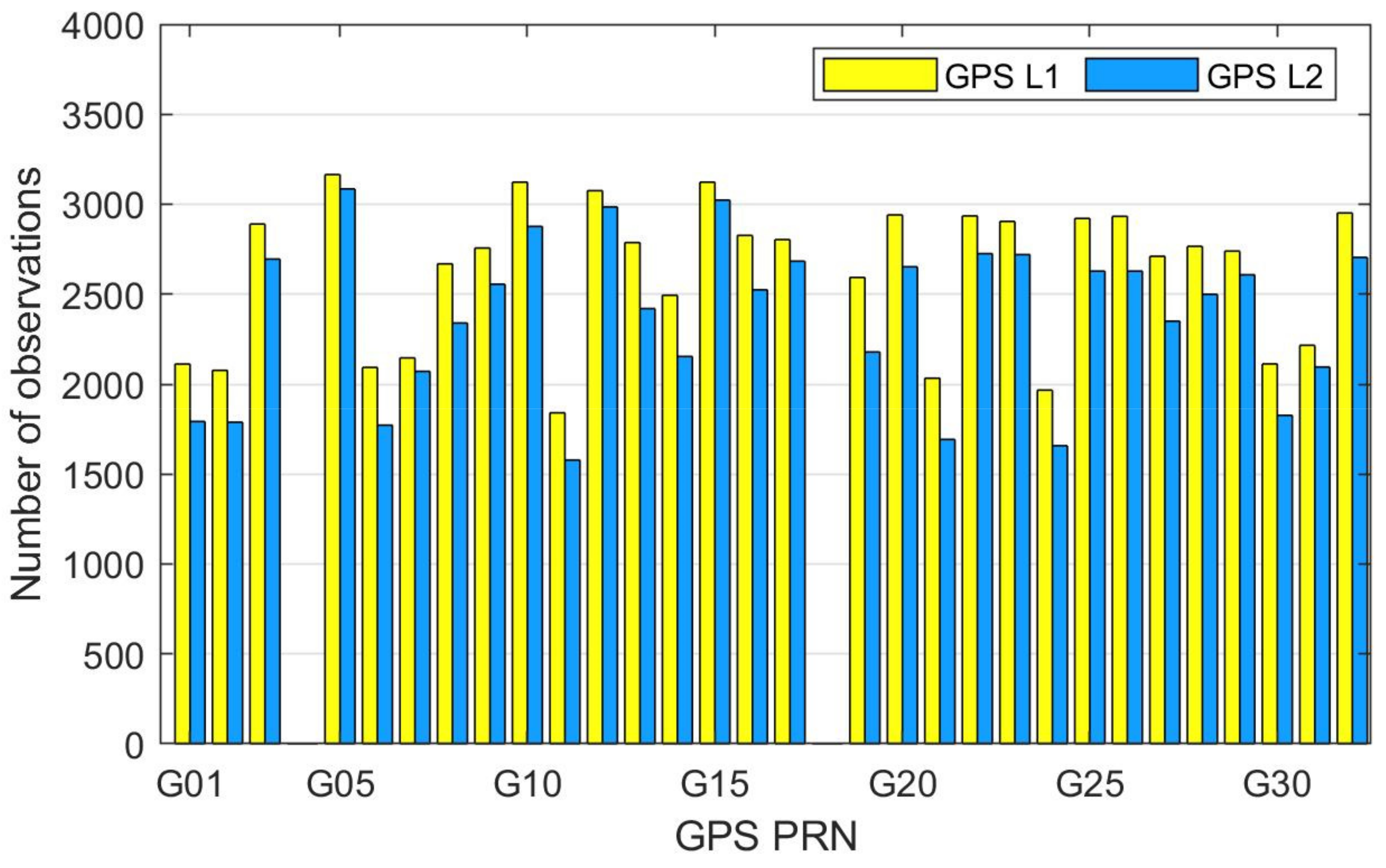
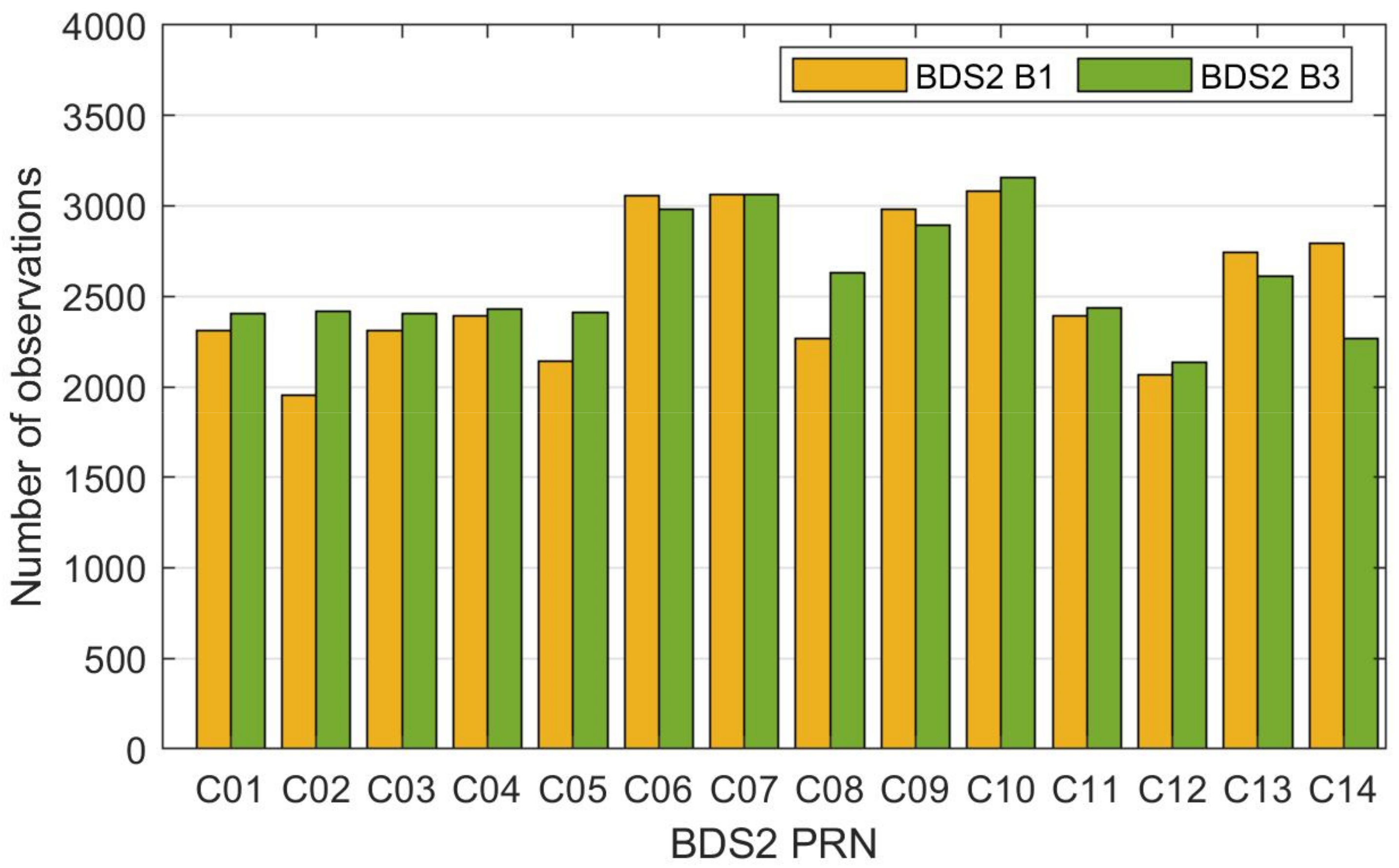
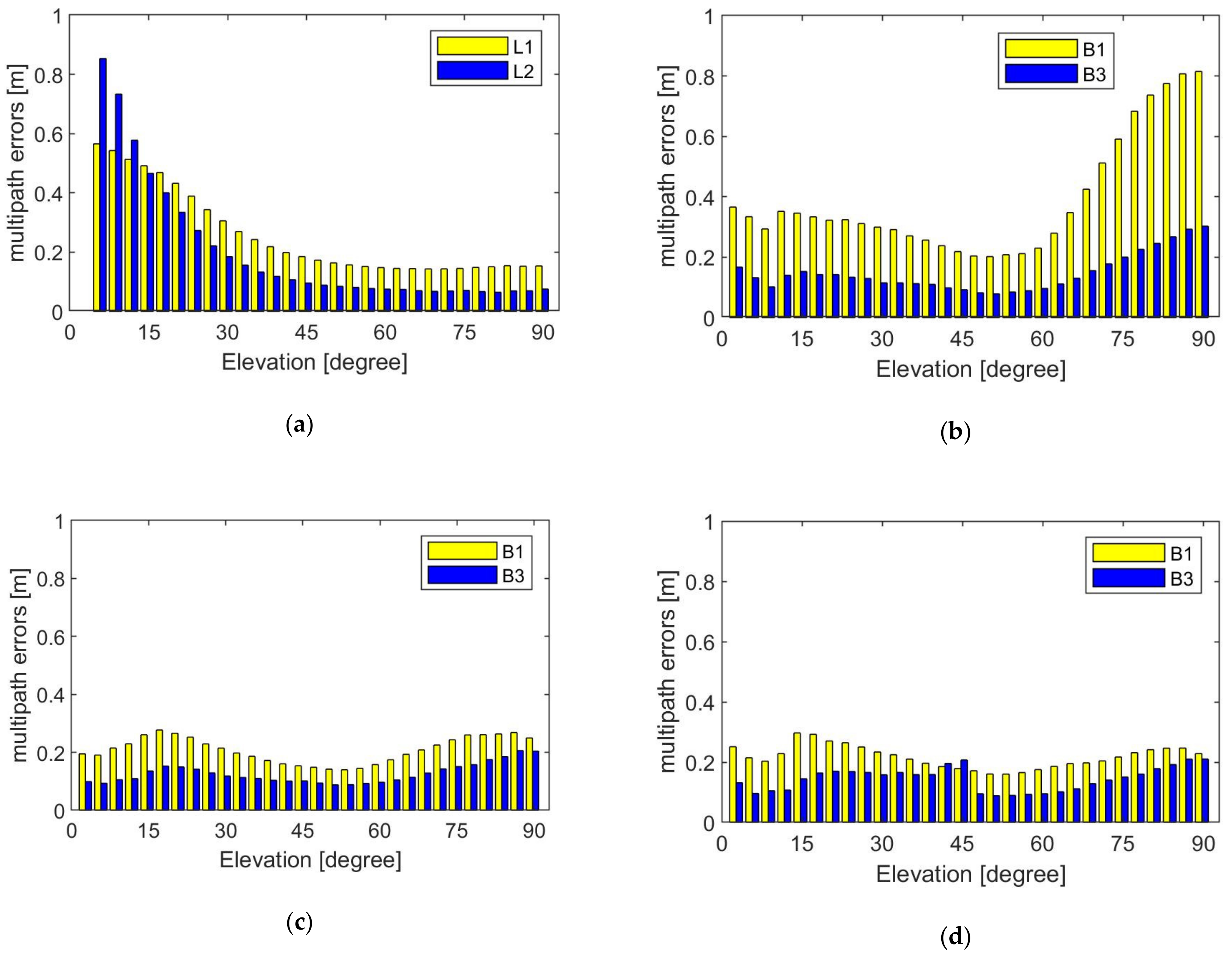
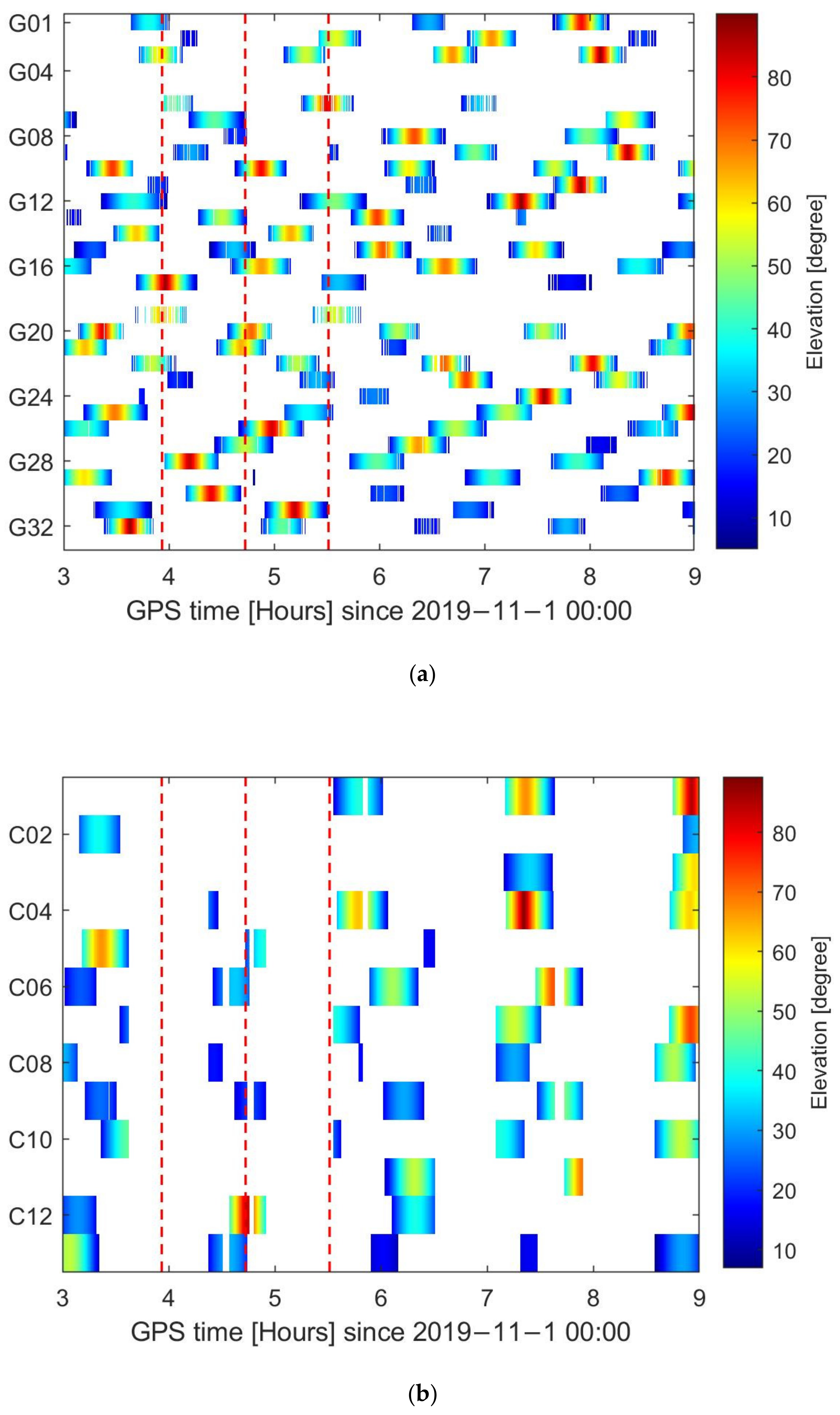
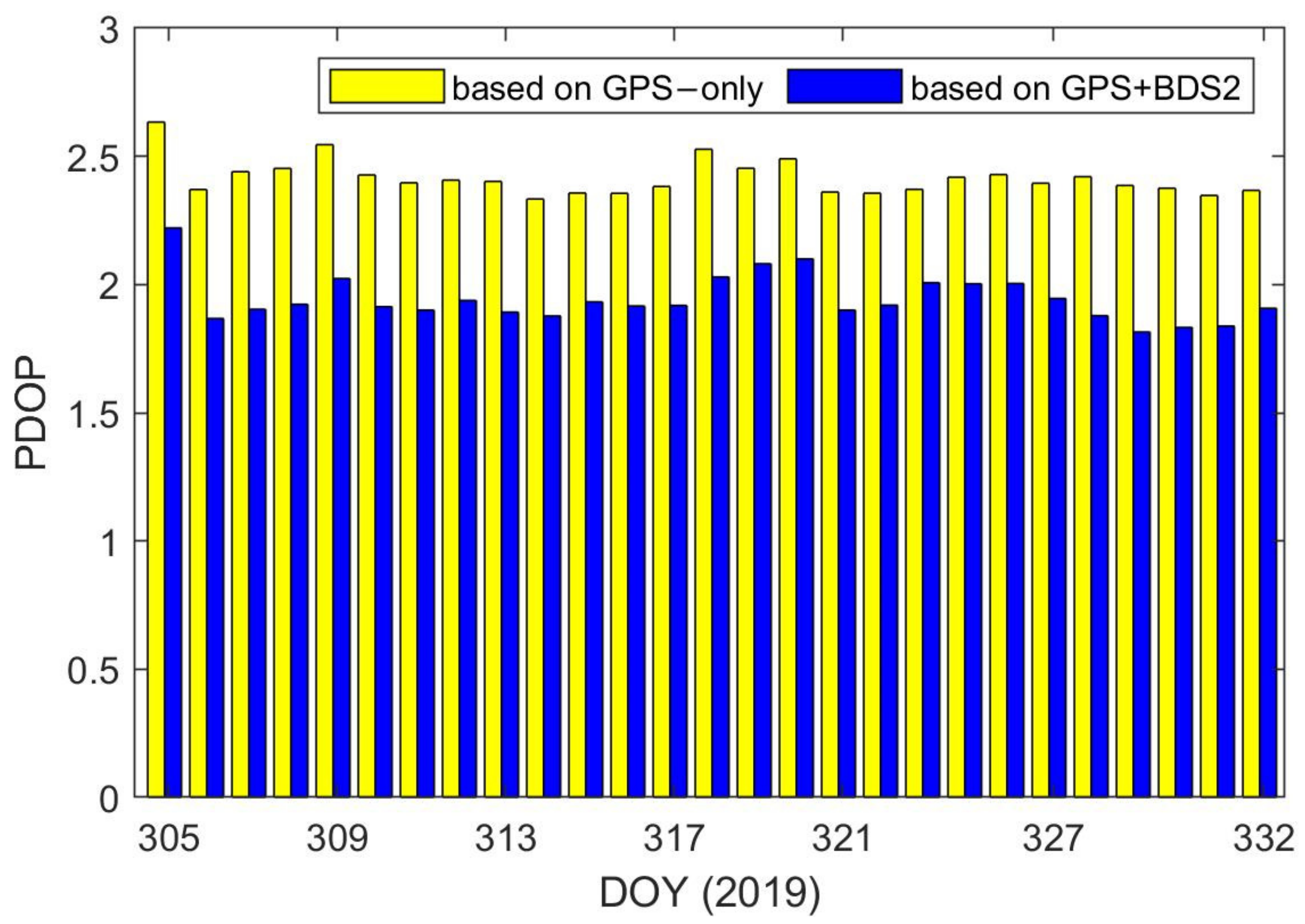
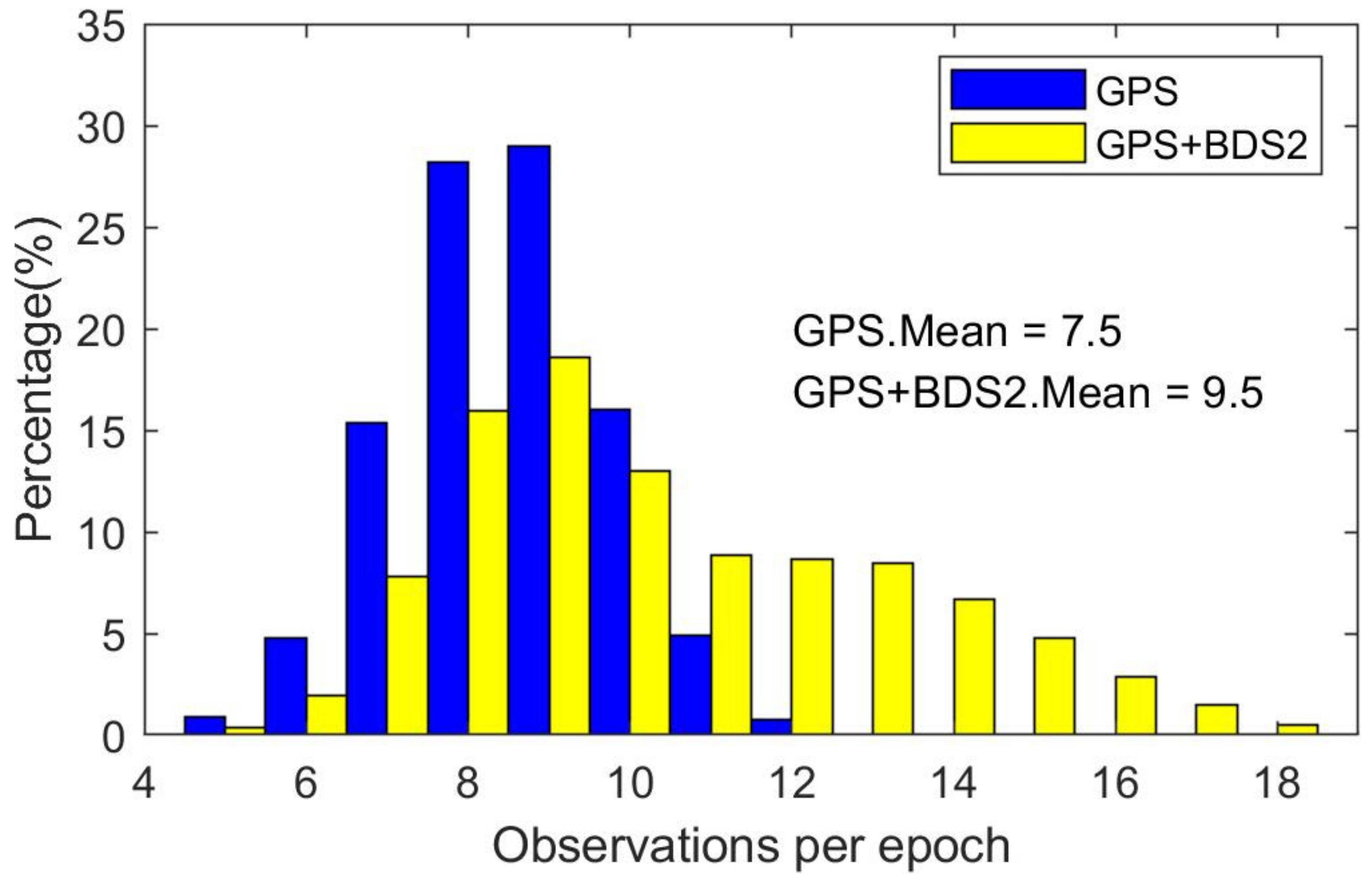
2.3. Data Quality of Multi-GNSS Observations
3. Methods for Precise Relative Orbit Determination
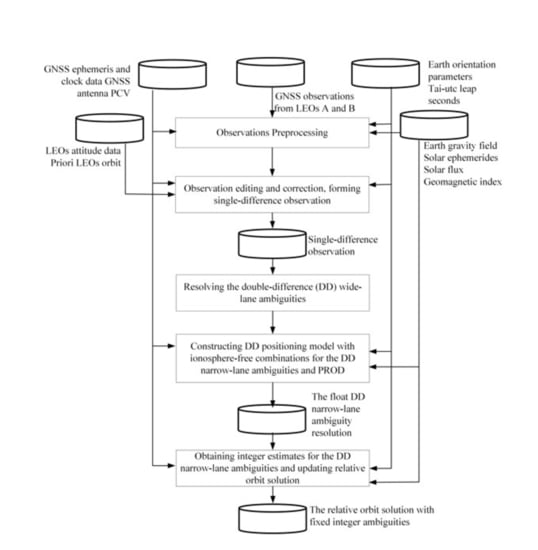
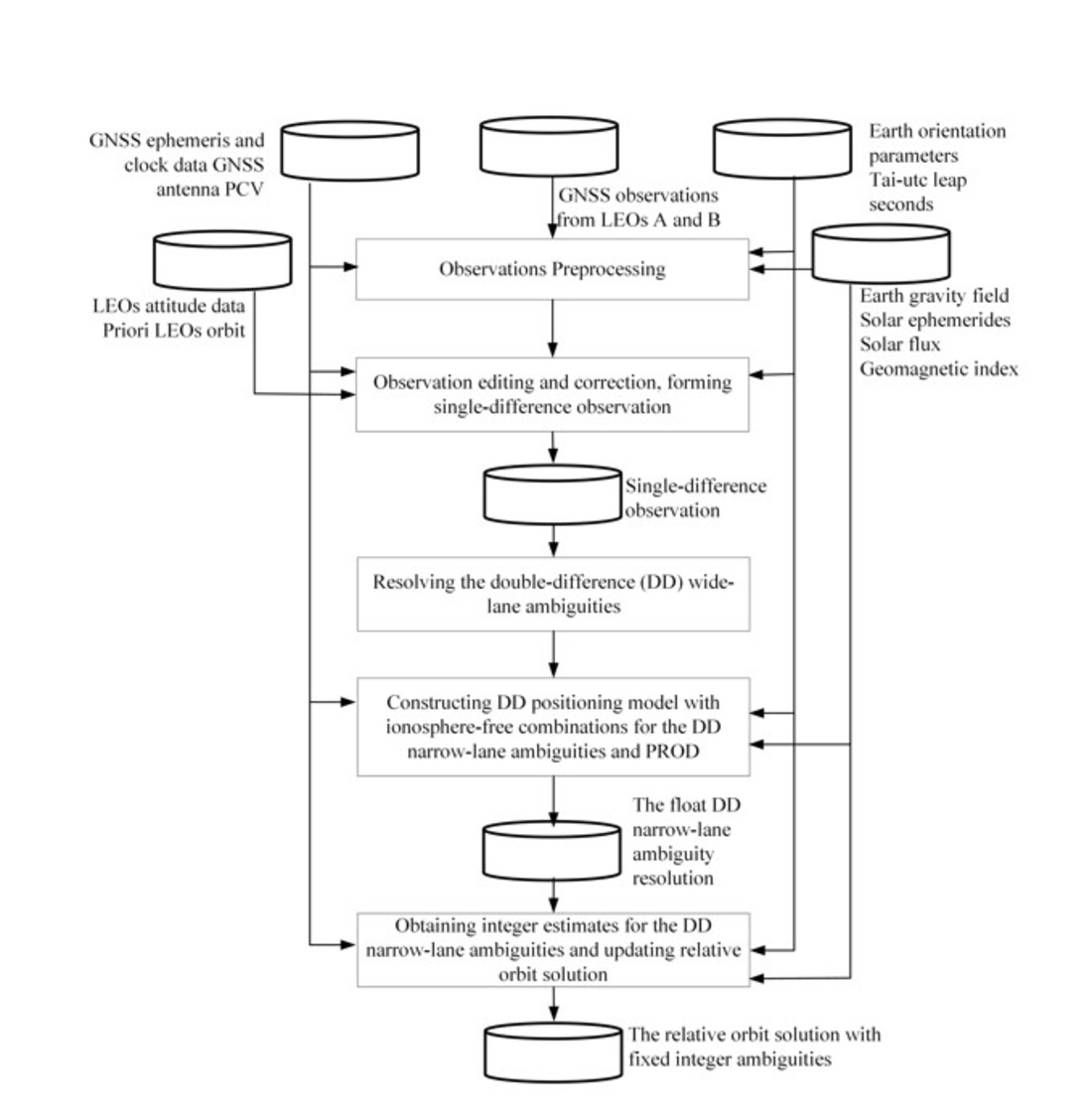
3.1. National University of Defense Technology (NDT) Approach
3.2. Xi’an Research Institute of Surveying and Mapping (CHS) Approach
4. Results
4.1. GPS-Based Precise Relative Orbit Determination (PROD)
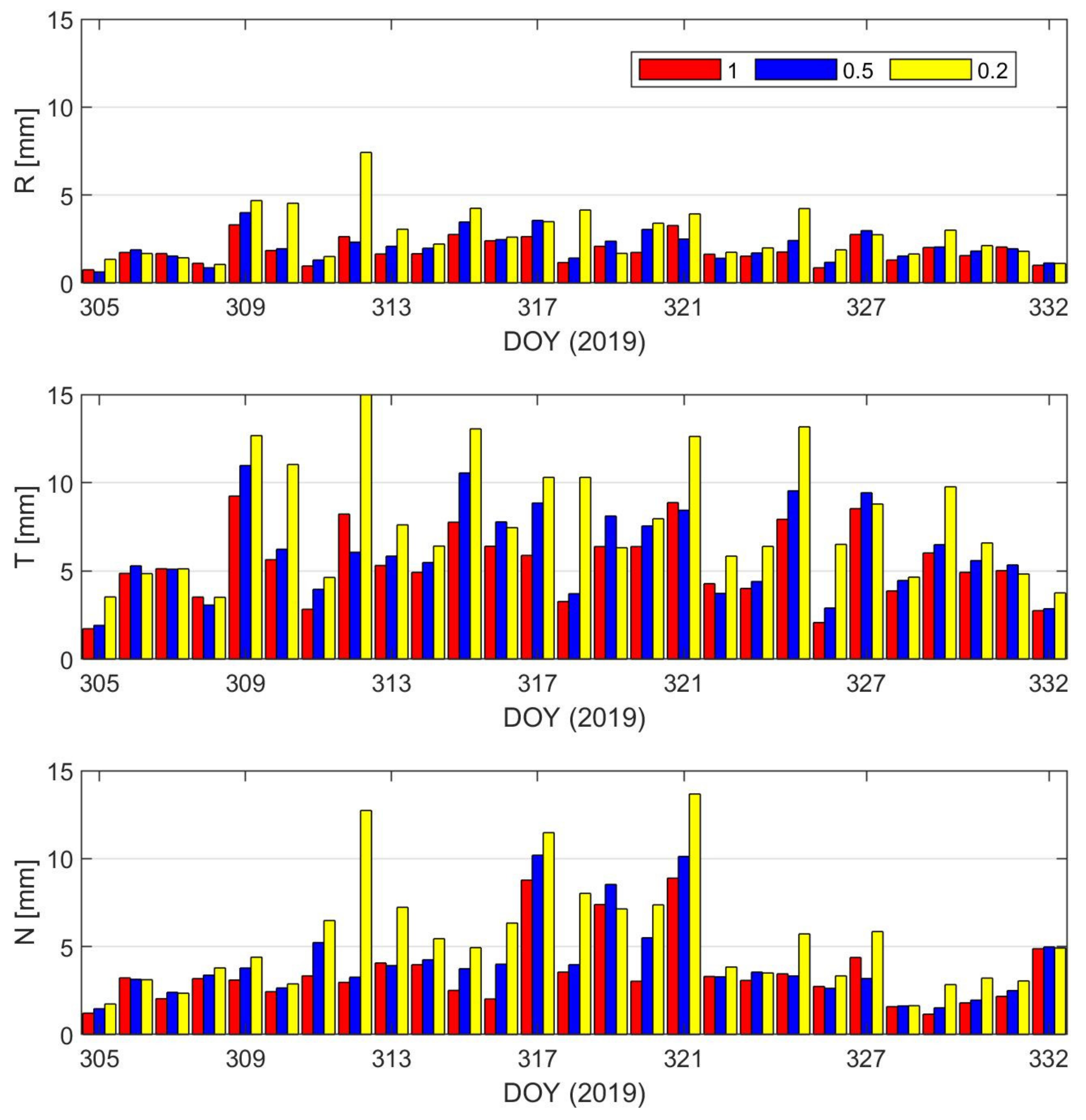
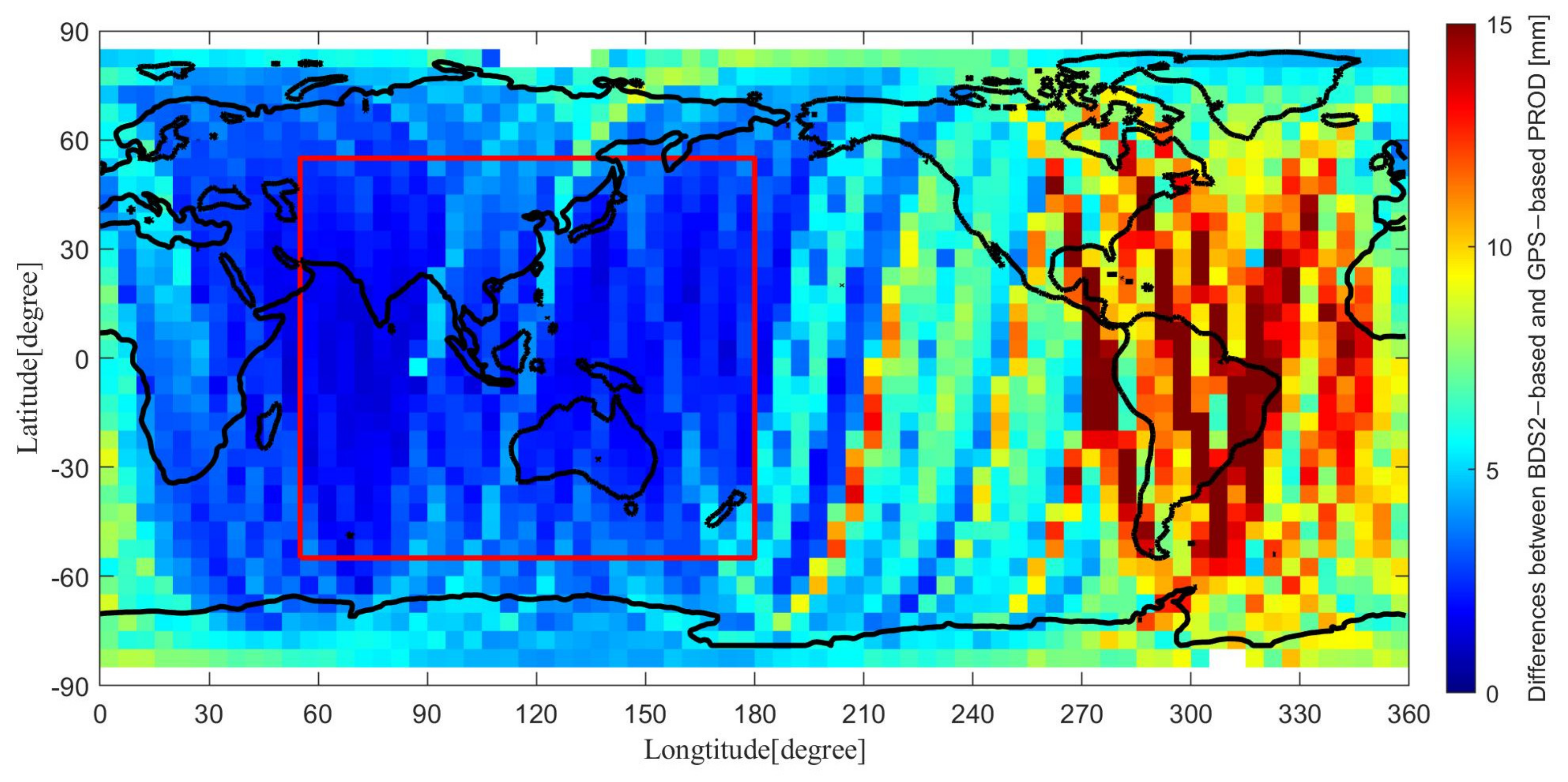
4.2. BDS2-Based Precise Relative Orbit Determination (PROD)
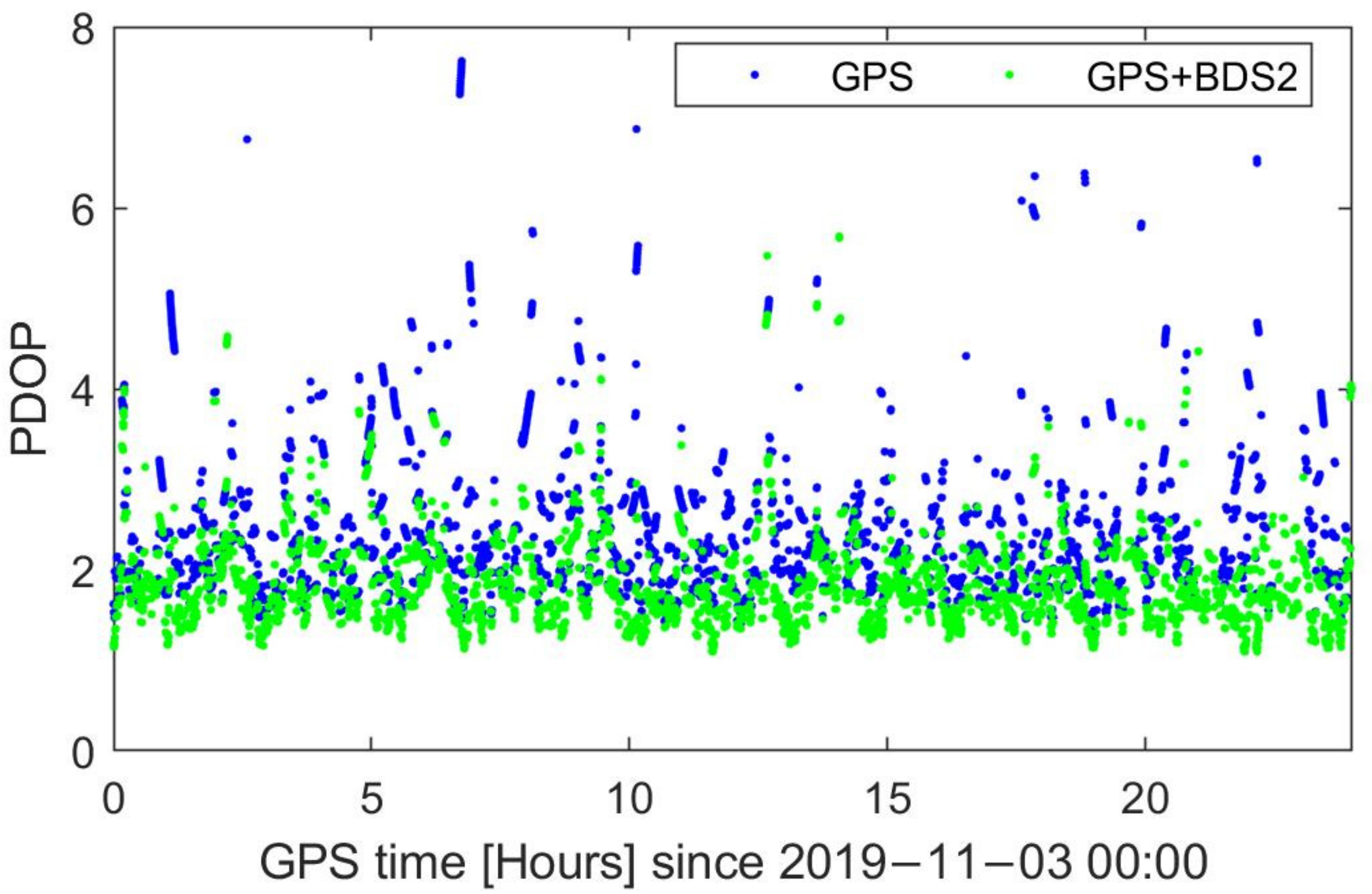
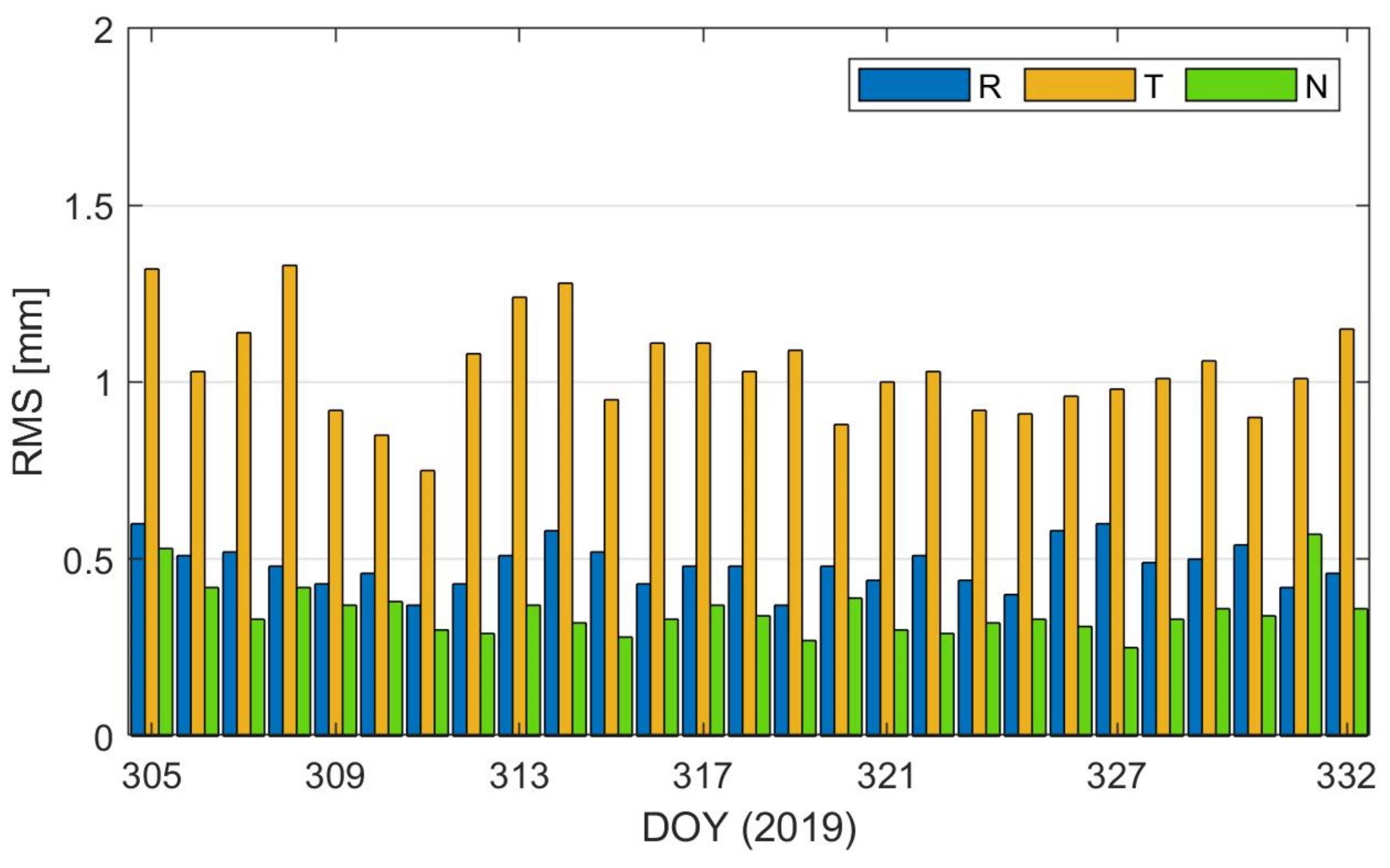
4.3. Combined GPS/BDS2 PROD
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lou, L.; Liu, Z.; Zhang, H.; Qian, F.; Huang, Y. TH-2 satellite engineering design and implementation. Acta Geod. Cartogr. Sin. 2020, 49, 1252–1264. [Google Scholar] [CrossRef]
- Kahle, R.; Schlepp, B.; Aida, S.; Kirschner, M.; Wermuth, M. Flight Dynamics Operations of the Tandem-X Formation. In Proceedings of the SpaceOps 2012 Conference, Stockholm, Sweden, 11–15 June 2012; pp. 1–12. [Google Scholar]
- Barneveld, P.W.L. Orbit Determination of Satellite Formations. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2012. [Google Scholar]
- Kroes, R.; Montenbruck, O.; Bertiger, W.; Visser, P. Precise GRACE baseline determination using GPS. GPS Solut. 2005, 9, 21–31. [Google Scholar] [CrossRef]
- Kroes, R. Precise Relative Positioning of Formation Flying Spacecraft Using GPS. Ph.D. Thesis, Netherlands Geodetic Commission, Delft, The Netherlands, 2006. [Google Scholar]
- Jäggi, A.; Hugentobler, U.; Bock, H.; Beutler, G. Precise orbit determination for GRACE using undifferenced or doubly differenced GPS data. Adv. Space Res. 2007, 39, 1612–1619. [Google Scholar] [CrossRef]
- Yang, Y.; Mao, Y.; Sun, B. Basic performance and future developments of BeiDou global navigation satellite system. Satell. Navig. 2020, 1, 1–8. [Google Scholar] [CrossRef] [Green Version]
- China Satellite Navigation Office. Development of the BeiDou Navigation Satellite System (Version 4.0); China Satellite Navigation Office: Shanghai, China, 2019. [Google Scholar]
- Zhao, X.; Zhou, S.; Ci, Y.; Hu, X.; Cao, J.; Chang, Z.; Tang, C.; Guo, D.; Guo, K.; Liao, M. High-precision orbit determination for a LEO nanosatellite using BDS-3. GPS Solut. 2020, 24, 1–14. [Google Scholar] [CrossRef]
- Wang, L.; Xu, B.; Fu, W.; Chen, R.; Li, T.; Han, Y.; Zhou, H. Centimeter-Level Precise Orbit Determination for the Luojia-1A Satellite Using BeiDou Observations. Remote Sens. 2020, 12, 2063. [Google Scholar] [CrossRef]
- Guenter, W.H. Status, perspectives and trends of satellite navigation. Satell. Navig. 2020, 1, 22. [Google Scholar]
- Yang, Y.; Li, J.; Xu, J.; Tang, J.; Guo, H.; He, H. Contribution of the Compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813–2819. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Ye, S.; Song, W.; Lou, Y.; Chen, D. Integrating GPS and BDS to shorten the initialization time for ambiguity-fixed PPP. GPS Solut. 2017, 21, 333–343. [Google Scholar] [CrossRef]
- Li, X.; Zhang, K.; Meng, X.; Zhang, W.; Zhang, Q.; Zhang, X.; Li, X. Precise Orbit Determination for the FY-3C Satellite Using Onboard BDS and GPS Observations from 2013, 2015, and 2017. Engineering 2019, 6, 904–912. [Google Scholar] [CrossRef]
- Liu, J.; Gu, D.; Ju, B.; Yao, J.; Duan, X.; Yi, D. Basic performance of BeiDou-2 navigation satellite system used in LEO satellites precise orbit determination. Chin. J. Aeronaut. 2014, 27, 1251–1258. [Google Scholar] [CrossRef] [Green Version]
- Verhagen, S.; Teunissen, P.J.G. Ambiguity resolution performance with GPS and BeiDou for LEO formation flying. Adv. Space Res. 2014, 54, 830–839. [Google Scholar] [CrossRef] [Green Version]
- Yi, B.; Gu, D.; Chang, X.; Shao, K. Integrating BDS and GPS for precise relative orbit determination of LEO formation flying. Chin. J. Aeronaut. 2018, 31, 2013–2022. [Google Scholar] [CrossRef]
- Kang, Z.; Tapley, B.; Bettadpur, S.; Ries, J.; Nagel, P.; Pastor, R. Precise orbit determination for the GRACE mission using only GPS data. J. Geod. 2006, 80, 322–331. [Google Scholar] [CrossRef]
- Montenbruck, O.; Barneveld, P.W.L.; Yoon, Y.; Visser, P.N.A.M. GPS-Based Precision Baseline Reconstruction for the TanDEM-X SAR-Formation. In Proceedings of the 2007 20th International Symposium on Space Flight Dynamics, Annapolis, MD, USA, 24–28 September 2007; pp. 1–13. [Google Scholar]
- Moon, Y.; Koenig, R.; Michalak, G.; Rothacher, M. Precise Orbit and Baseline Determination for TerraSAR-X and TanDEM-X. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; Volume 2, pp. 121–124. [Google Scholar] [CrossRef]
- Montenbruck, O.; Wermuth, M.; Kahle, R. GPS Based Relative Navigation for the TanDEM-X Mission—First Flight Results. Navigation 2011, 58, 293–304. [Google Scholar] [CrossRef]
- Allende-Alba, G.; Montenbruck, O. Robust and precise baseline determination of distributed spacecraft in LEO. Adv. Space Res. 2016, 57, 46–63. [Google Scholar] [CrossRef]
- Jäggi, A.; Montenbruck, O.; Moon, Y.; Wermuth, M.; König, R.; Michalak, G.; Bock, H.; Bodenmann, D. Inter-agency comparison of TanDEM-X baseline solutions. Adv. Space Res. 2012, 50, 260–271. [Google Scholar] [CrossRef]
- Shao, K.; Gu, D.; Ju, B.; Wang, W.; Wei, C.; Duan, X.; Wang, Z. Analysis of Tiangong-2 orbit determination and prediction using onboard dual-frequency GNSS data. GPS Solut. 2019, 24, 11. [Google Scholar] [CrossRef]
- Guo, X.; Zhao, Q. M-estimation-based robust and precise baseline determination for formation-flying satellites. GPS Solut. 2021, 25, 1–12. [Google Scholar] [CrossRef]
- Qing, X. Research on Precision Orbit Determination Theory and Method of Low Earth Orbiter Based on GPS Technique. Ph.D. Thesis, Information Engineering University, Zhengzhou, China, 2009. [Google Scholar]
- Yang, C. LM-4B Sends Tianhui 2 Satellite into Orbit. Aerosp. China 2019, 20, 59. [Google Scholar]
- Qian, F.; Chen, G.; Lu, J.; Chen, X.; Lou, L.; Jiang, T.; Liu, W.; Wang, S. Correcting method of slant-range error for the TH-2 satellites. Remote Sens. Lett. 2021, 12, 142–149. [Google Scholar] [CrossRef]
- Montenbruck, O.; Kroes, R. In-flight performance analysis of the CHAMP BlackJack GPS Receiver. GPS Solut. 2003, 7, 74–86. [Google Scholar] [CrossRef]
- Gu, D.; Ju, B.; Liu, J.; Tu, J. Enhanced GPS-based GRACE baseline determination by using a new strategy for ambiguity resolution and relative phase center variation corrections. Acta Astronaut. 2017, 138, 176–184. [Google Scholar] [CrossRef]
- Yi, B.; Gu, D.; Ju, B.; Shao, K.; Zhang, H. Enhanced baseline determination for formation flying LEOs by relative corrections of phase center and code residual variations. Chin. J. Aeronaut. 2021. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- De Jonge, P.J.; Tiberius, C.C.J.M. The LAMBDA Method for Integer Ambiguity Estimation: Implementation Aspects; Delft Geodetic Computing Centre LGR Series, No.12; Delft University of Technology; Faculty of Geodetic Engineering: Delft, The Netherlands, 1996. [Google Scholar]
- Teunissen, P.J.G.; de Jonge, P.J.; Tiberius, C.C.J.M. Performance of the LAMBDA method for fast GPS ambiguity resolution. Navigation 1997, 44, 373–383. [Google Scholar] [CrossRef]
- Ju, B.; Gu, D.; Herring, T.A.; Allende-Alba, G.; Montenbruck, O.; Wang, Z. Precise orbit and baseline determination for maneuvering low earth orbiters. GPS Solut. 2015, 21, 53–64. [Google Scholar] [CrossRef] [Green Version]
- Qing, X.; Yang, Y. Millimeter-level relative positioning of formation flying satellites onboard GPS. J. Astronaut. 2010, 31, 369–372. [Google Scholar] [CrossRef]
- Frei, E.; Beutler, G. Rapid static positioning based on the fast ambiguity resolution approach “FARA”: Theory and first results. Manuscr. Geod. 1990, 15, 325–356. [Google Scholar]
- Shao, K.; Zhang, H.; Qin, X.; Huang, Z.; Yi, B.; Gu, D. Precise absolute and relative orbit determination for distributed InSAR satellite system. Acta Geod. Cartogr. Sin. 2021, 50, 580–588. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. Assessment of precise orbit and clock products for Galileo, BeiDou, and QZSS from IGS Multi-GNSS Experiment (MGEX). GPS Solut. 2017, 21, 279–290. [Google Scholar] [CrossRef]
- Qing, Y.; Lin, J.; Liu, Y.; Dai, X.; Lou, Y.; Gu, S. Precise Orbit Determination of the China Seismo-Electromagnetic Satellite (CSES) Using Onboard GPS and BDS Observations. Remote Sens. 2020, 12, 3234. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Odijk, D. Ambiguity Dilution of Precision: Definition, properties and application. In Proceedings of the Institute of Navigation’s ION GPS-1997, Kansas City, MO, USA, 16–19 September 1997; pp. 891–899. [Google Scholar]
- Teunissen, P.J.G. A canonical theory for short GPS baselines. Part IV: Precision versus reliability. J. Geod. 1997, 71, 513–525. [Google Scholar] [CrossRef] [Green Version]
- Verhagen, S. On the Reliability of Integer Ambiguity Resolution. Navigation 2005, 52, 99–110. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Global Positioning System Satellites (GPS) | Medium Earth Orbit Satellites (MEO) | Inclined Geosynchronous Orbit Satellites (IGSO) | Geostationary Earth Orbit Satellites (GEO) |
|---|---|---|---|---|
| L1\B1 (m) | 0.26 | 0.39 | 0.21 | 0.22 |
| L2\B3 (m) | 0.20 | 0.15 | 0.13 | 0.14 |
| carrier phase fitting residuals (mm) | 4.7 | 3.8 | 4.0 | 2.6 |
| Item | NDT | CHS |
|---|---|---|
| Global Navigation Satellite System (GNSS) measurement model | Double-differenced ionosphere-free code and phase observations; 10 s sampling; igs14_2108.atx PCO and phase center variations (PCVs) correction of GNSS transmitter antennas; GeoForschungsZentrum (GFZ) GPS orbits and 30 s clocks; Relativity correction | Double-differenced ionosphere-free code and phase observations; 30 s sampling; igs08.atx PCO and PCVs correction of GNSS transmitter antennas; center for orbit determination in europe (CODE) final GPS orbits and 30 s clocks; No relativity correction |
| Gravitational forces | GRACE Gravity Model 02C (GGM02C) gravity (100 × 100); solid-earth, pole, and ocean tides (international Earth rotation and reference systems service (IERS) 2003); luni-solar-planetary (Jet Propulsion Laboratory development ephemeris 405 (JPL DE405)) | European Improved Gravity Field Model of the Earth by New Techniques (EIGEN2) gravity (120 × 120); solid-earth, pole, and ocean tides (IERS 2000); luni-solar-planetary (JPL DE405) |
| Non-gravitationalforces | Jacchia 71 density model, CD is estimated per 3 h; ball, CR is estimated; piecewise linear accelerations in T and N directions, estimated per 15 min; maneuvers (constant thrust arc) | No drag model; Emprical CODE Orbit Model (ECOM) 9; pseudo-stochastic R, T and N pulses at 6-min intervals; maneuvers (additional set of pulses) |
| Reference frames | International Terrestrial Reference Frame (ITRF) 2008 reference frame; IERS Standard Rapid earth orientation parameters (EOPs); International Astronomical Union (IAU) 2000A; | ITRF 2008 reference frame; CODE final Earth rotation parameters (ERPs); IAU 2000A; |
| Ambiguities resolution | Least-squares Ambiguity Decorrelation Adjustment (LAMBDA) | Integer rounding |
| Weight of GEO Satellites | 1 | 0.5 | 0.2 | |
|---|---|---|---|---|
| Global/mm | R | 2.01 | 2.25 | 3.23 |
| T | 5.85 | 6.61 | 9.26 | |
| N | 3.44 | 3.90 | 5.80 | |
| 3D | 7.08 | 8.00 | 11.40 | |
| The non-Asia-Pacific region/mm | R | 2.16 | 2.42 | 3.41 |
| T | 6.62 | 7.49 | 10.43 | |
| N | 3.87 | 4.37 | 6.73 | |
| 3D | 7.96 | 9.00 | 12.69 | |
| The Asia-Pacific region/mm | R | 1.44 | 1.63 | 2.61 |
| T | 2.04 | 2.32 | 3.73 | |
| N | 1.45 | 1.74 | 3.40 | |
| 3D | 2.89 | 3.32 | 5.69 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, B.; Gu, D.; Shao, K.; Ju, B.; Zhang, H.; Qin, X.; Duan, X.; Huang, Z. Precise Relative Orbit Determination for Chinese TH-2 Satellite Formation Using Onboard GPS and BDS2 Observations. Remote Sens. 2021, 13, 4487. https://doi.org/10.3390/rs13214487
Yi B, Gu D, Shao K, Ju B, Zhang H, Qin X, Duan X, Huang Z. Precise Relative Orbit Determination for Chinese TH-2 Satellite Formation Using Onboard GPS and BDS2 Observations. Remote Sensing. 2021; 13(21):4487. https://doi.org/10.3390/rs13214487
Chicago/Turabian StyleYi, Bin, Defeng Gu, Kai Shao, Bing Ju, Houzhe Zhang, Xianping Qin, Xiaojun Duan, and Zhiyong Huang. 2021. "Precise Relative Orbit Determination for Chinese TH-2 Satellite Formation Using Onboard GPS and BDS2 Observations" Remote Sensing 13, no. 21: 4487. https://doi.org/10.3390/rs13214487