Low-Cost Ka-Band Cloud Radar System for Distributed Measurements within the Atmospheric Boundary Layer

 ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
2. Cloud Radar Prototype
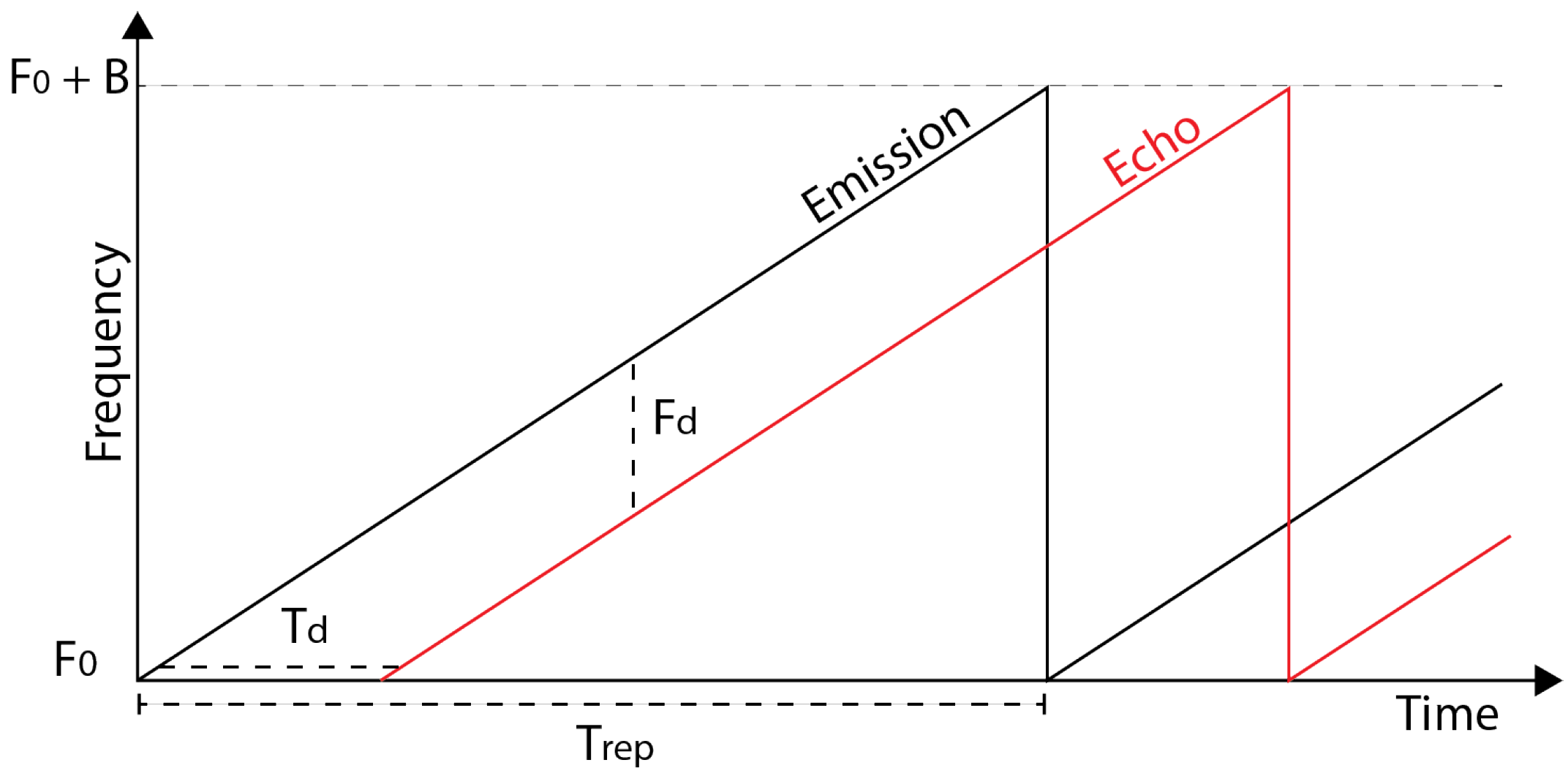
2.1. Measurement Principle
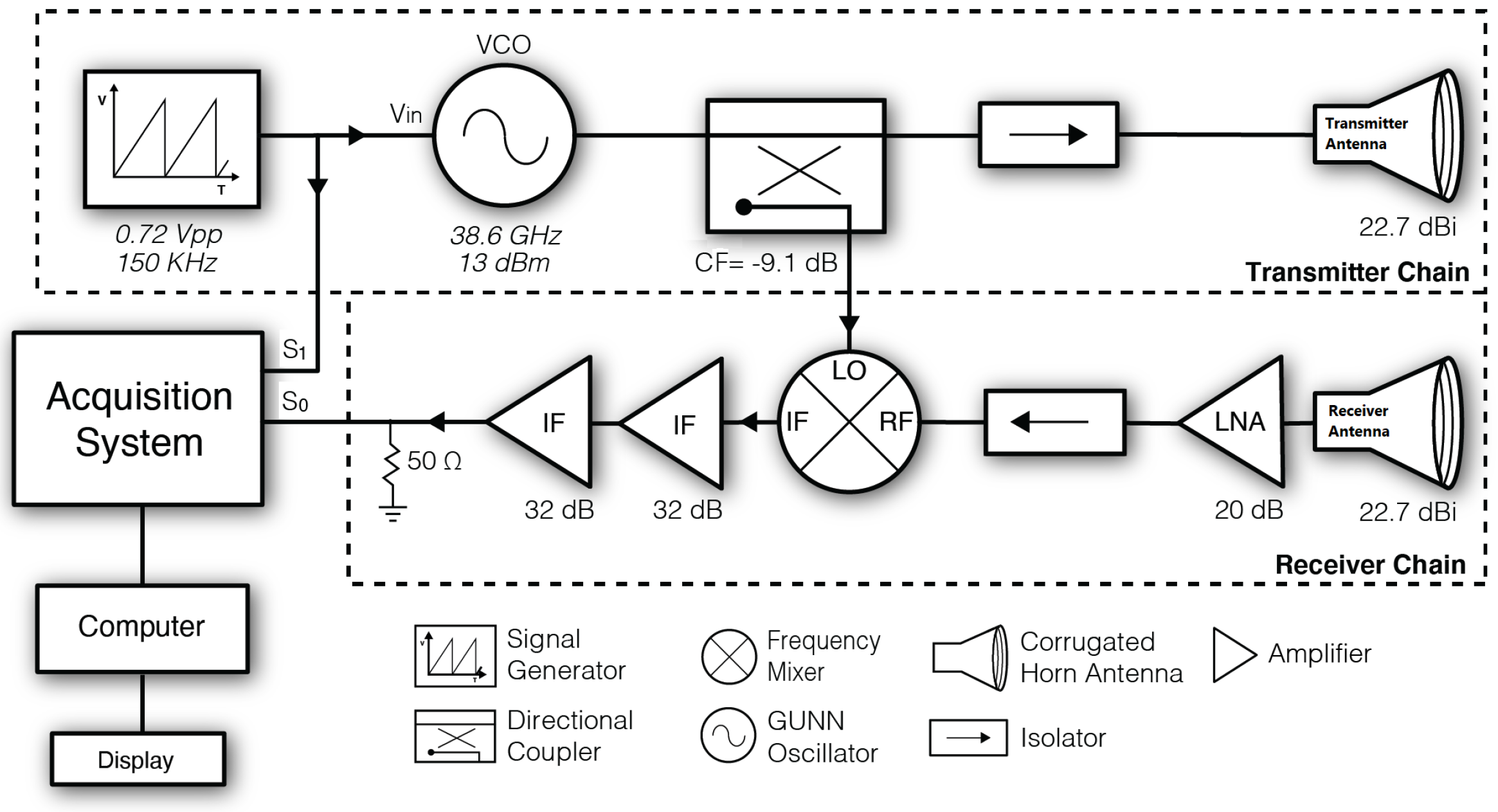
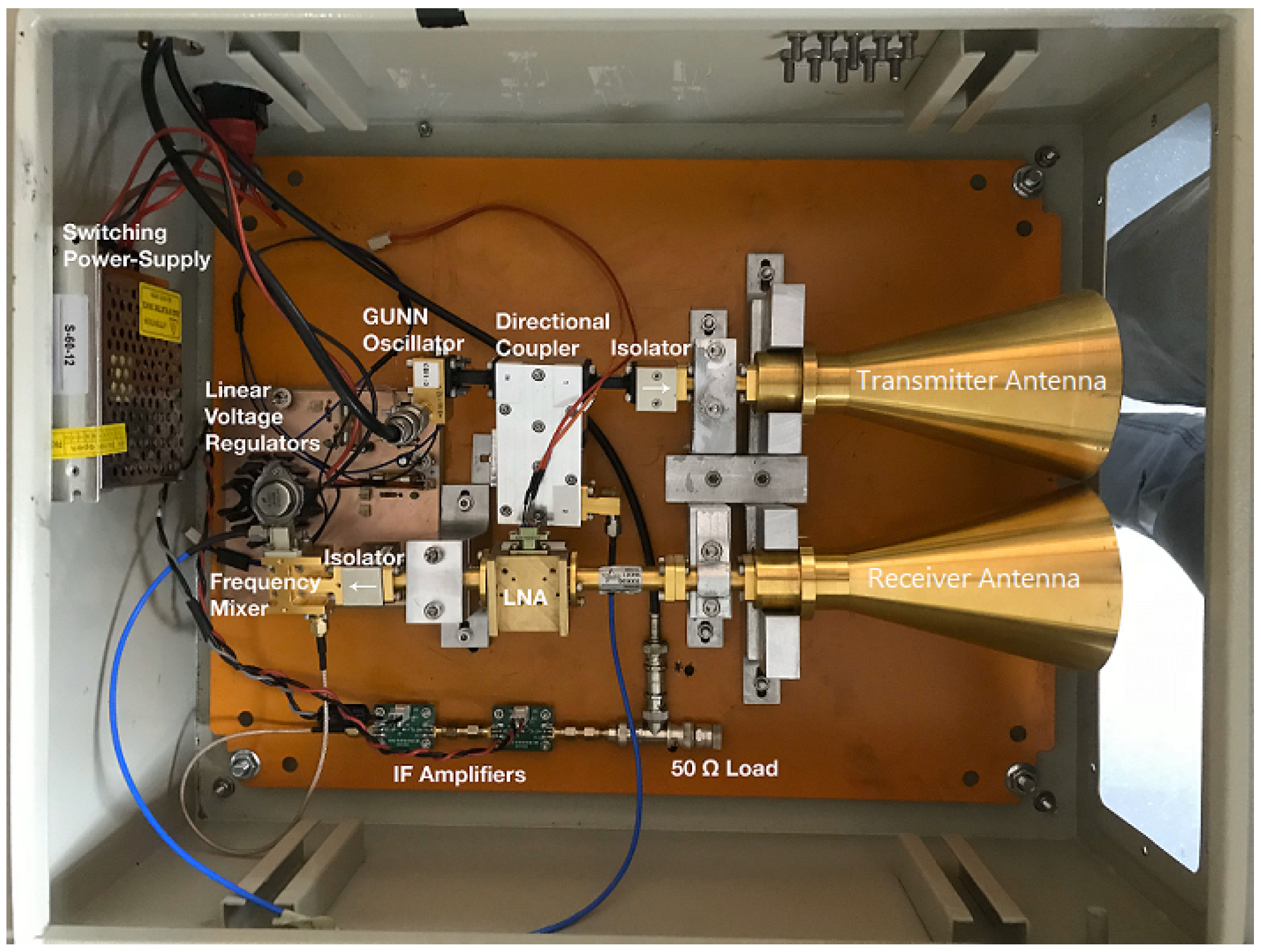
2.2. Radar Hardware
2.3. Digital Processing
3. Calibration Procedures
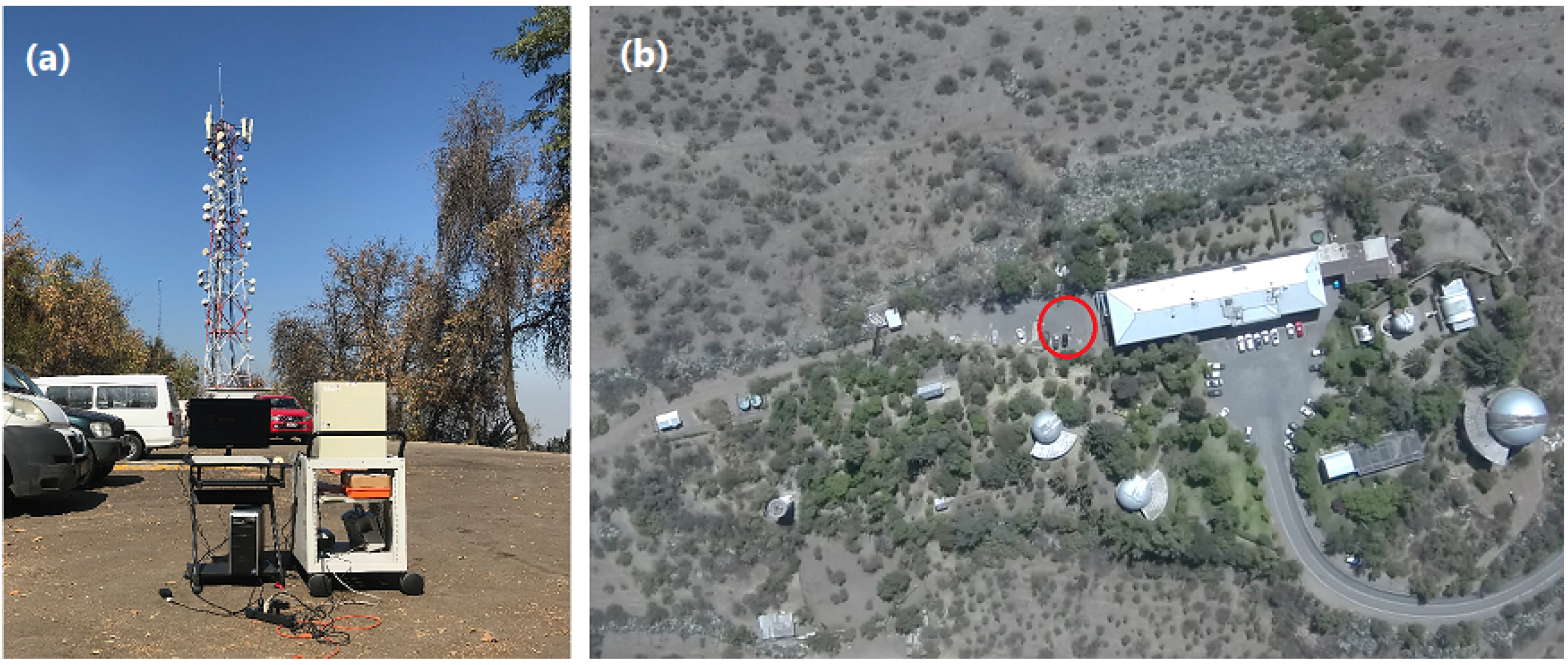
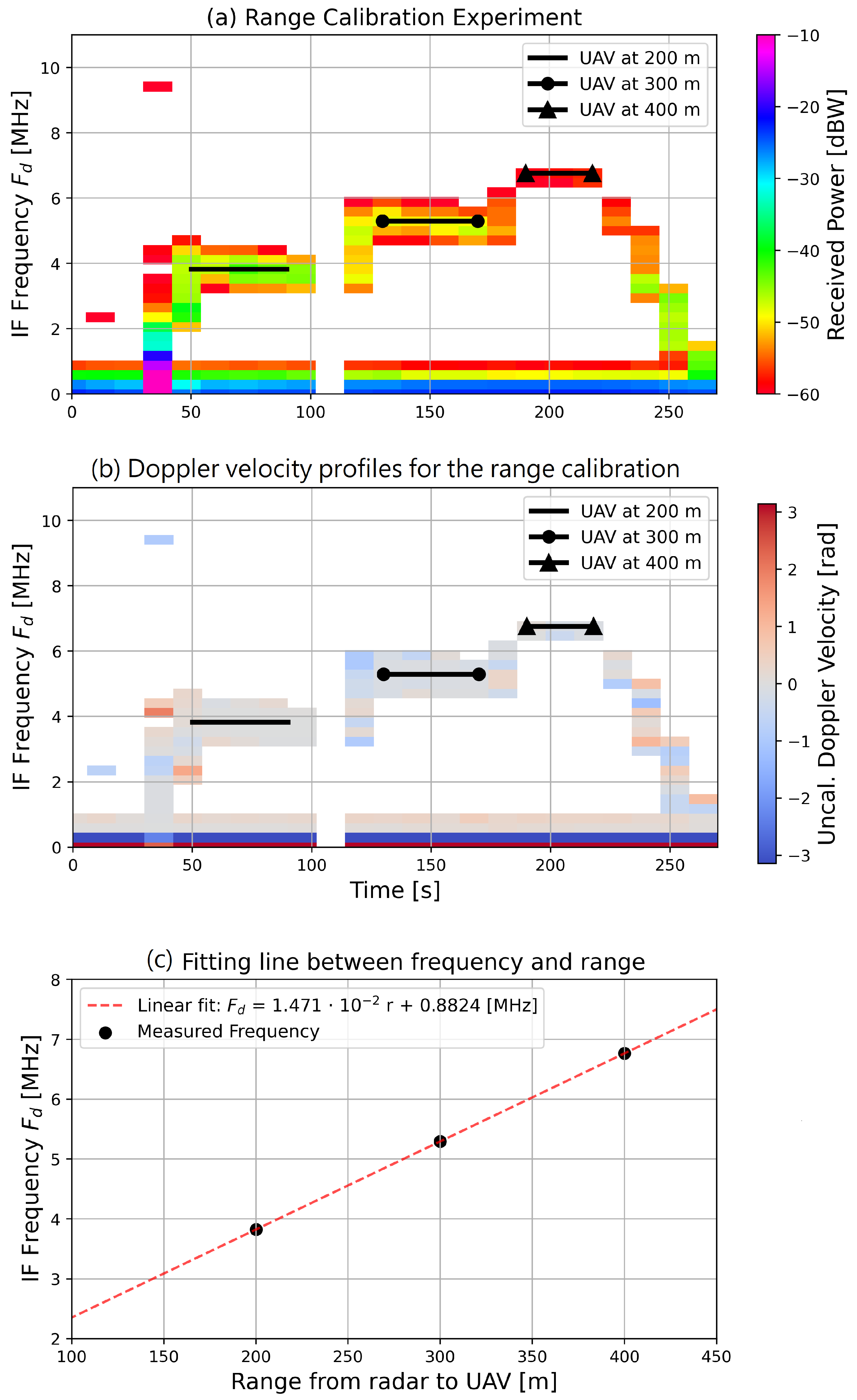
3.1. Distance Calibration with an Unmanned Aerial Vehicle
3.2. Internal Calibration
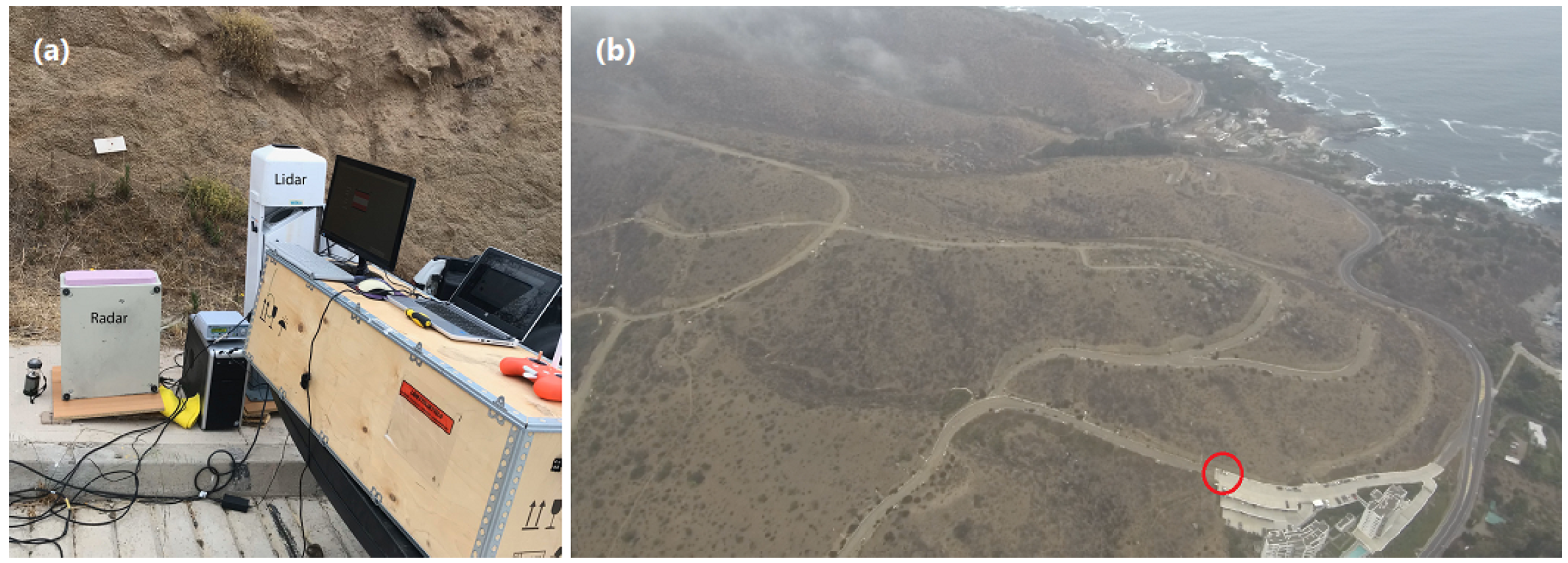
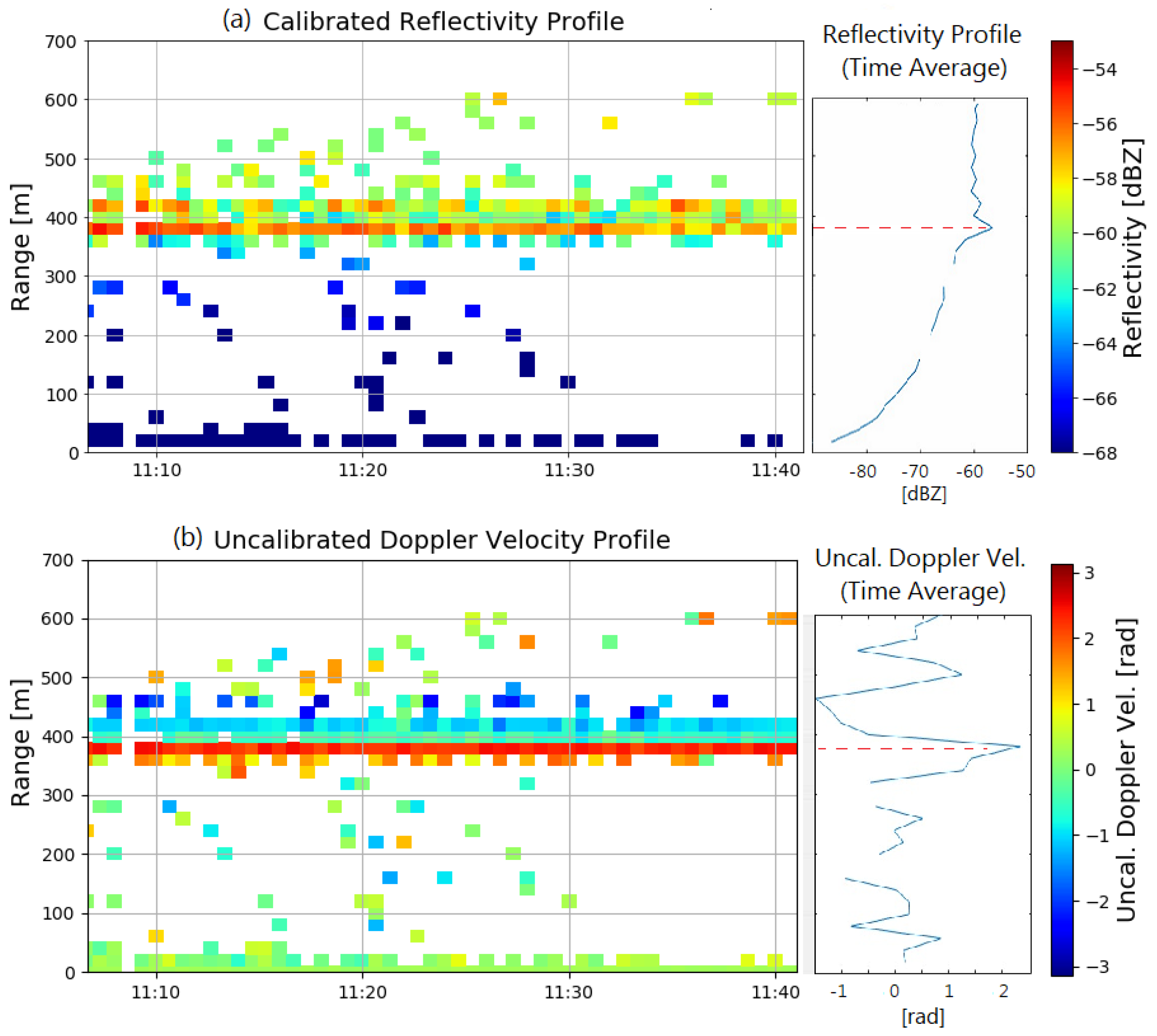
4. Field Campaign
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DAS | Data Acquisition System |
| FFT | Fast Fourier Transform |
| FMCW | Frequency-Modulated Continuous-Wave |
| IF | Intermediate Frequency |
| RF | Radio Frequency |
| LO | Local Oscillator |
| UAV | Unmanned Aerial Vehicle |
| VCO | Voltage Controlled Oscillator |
Appendix A. Implementation Specific Details of the Main Radar Blocks
Appendix A.1. Transmitter Chain Details
Appendix A.2. Antenna Details
Appendix A.3. Receiver Chain Details
Appendix A.4. Data Acquisition System Details
References
- Wærsted, E.G.; Haeffelin, M.; Dupont, J.C.; Delanoë, J.; Dubuisson, P. Radiation in fog: Quantification of the impact on fog liquid water based on ground-based remote sensing. Atmos. Chem. Phys. 2017, 17, 10811–10835. [Google Scholar] [CrossRef] [Green Version]
- Hansen, J.; Sato, M.; Ruedy, R. Radiative forcing and climate response. J. Geophys. Res. Atmos. 1997, 102, 6831–6864. [Google Scholar] [CrossRef]
- Allan, S.; Gaddy, S.; Evans, J. Delay Causality and Reduction at the New York City Airports Using Terminal Weather Information Systems; Technical Report; Lincoln Laboratory, Massachusetts Institute of Technology: Cambridge, MA, USA, 2001. [Google Scholar]
- Bartlett, J.S.; Ciotti, Á.M.; Davis, R.F.; Cullen, J.J. The spectral effects of clouds on solar irradiance. J. Geophys. Res. Ocean. 1998, 103, 31017–31031. [Google Scholar] [CrossRef]
- Mlawer, E.; Turner, D.; Paine, S.; Palchetti, L.; Bianchini, G.; Payne, V.; Cady-Pereira, K.; Pernak, R.; Alvarado, M.; Gombos, D. Analysis of water vapor absorption in the far-infrared and submillimeter regions using surface radiometric measurements from extremely dry locations. J. Geophys. Res. Atmos. 2019, 124, 8134–8160. [Google Scholar] [CrossRef]
- Bauer, S.; Chapman, J.W.; Reynolds, D.R.; Alves, J.A.; Dokter, A.M.; Menz, M.M.; Sapir, N.; Ciach, M.; Pettersson, L.B.; Kelly, J.F. From agricultural benefits to aviation safety: Realizing the potential of continent-wide radar networks. BioScience 2017, 67, 912–918. [Google Scholar] [CrossRef]
- Fox, N.I.; Illingworth, A.J. The Retrieval of Stratocumulus Cloud Properties by Ground-Based Cloud Radar. J. Appl. Meteorol. 1997, 36, 485–492. [Google Scholar] [CrossRef]
- Hogan, R.J.; Jakob, C.; Illingworth, A.J. Comparison of ECMWF winter-season cloud fraction with radar-derived values. J. Appl. Meteorol. 2001, 40, 513–525. [Google Scholar] [CrossRef] [Green Version]
- Dupont, J.C.; Haeffelin, M.; Wærsted, E.; Delanoë, J.; Renard, J.B.; Preissler, J.; O’dowd, C. Evaluation of Fog and Low Stratus Cloud Microphysical Properties Derived from In Situ Sensor, Cloud Radar and SYRSOC Algorithm. Atmosphere 2018, 9, 169. [Google Scholar] [CrossRef] [Green Version]
- Haynes, J.M.; L’Ecuyer, T.S.; Stephens, G.L.; Miller, S.D.; Mitrescu, C.; Wood, N.B.; Tanelli, S. Rainfall retrieval over the ocean with spaceborne W-band radar. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Wærsted, E.G.; Haeffelin, M.; Steeneveld, G.J.; Dupont, J.C. Understanding the dissipation of continental fog by analysing the LWP budget using idealized LES and in situ observations. Q. J. R. Meteorol. Soc. 2019, 145, 784–804. [Google Scholar] [CrossRef]
- Delanoë, J.; Protat, A.; Vinson, J.P.; Brett, W.; Caudoux, C.; Bertrand, F.; Parent du Chatelet, J.; Hallali, R.; Barthes, L.; Haeffelin, M. Basta: A 95-GHz fmcw doppler radar for cloud and fog studies. J. Atmos. Ocean. Technol. 2016, 33, 1023–1038. [Google Scholar] [CrossRef] [Green Version]
- Toledo, F.; Rodríguez, R.; Rondanelli, R.; Aguirre, R.; Díaz, M. SDR Cloud Radar development with reused radio telescope components. In Proceedings of the 2017 First, IEEE International Symposium of Geoscience and Remote Sensing (GRSS-CHILE), Valdivia, Chile, 15–16 June 2017; pp. 1–5. [Google Scholar]
- Nowak, D.; Ruffieux, D.; Agnew, J.L.; Vuilleumier, L. Detection of fog and low cloud boundaries with ground-based remote sensing systems. J. Atmos. Ocean. Technol. 2008, 25, 1357–1368. [Google Scholar] [CrossRef] [Green Version]
- Piper, S.O. Homodyne FMCW radar range resolution effects with sinusoidal nonlinearities in the frequency sweep. In Proceedings of the International Radar Conference, Alexandria, VA, USA, 8–11 May 1995; pp. 563–567. [Google Scholar]
- Won, Y.S.; Shin, D.; Jung, S.; Lee, J.H.; Lee, C.; Park, M.; Song, Y.; Moon, K.; Seo, D.W. Method to improve degraded range resolution due to non-ideal factors in FMCW radar. IEICE Electron. Express 2019, 16, 20180924. [Google Scholar] [CrossRef]
- Yau, M.K.; Rogers, R.R. A Short Course in Cloud Physics; Elsevier: Amsterdam, The Netherlands, 1996; p. 190. [Google Scholar]
- Frasier, S.; Ince, T.; Lopez-Dekker, F. Performance of S-band FMCW radar for boundary layer observation. In Proceedings of the Preprints, 15th Conference on Boundary Layer and Turbulence, Wageningen, The Netherlands, 15–19 July 2002; Volume 7. [Google Scholar]
- Feng, Z.; Chen, Y.; Hakala, T.; Hyyppä, J. Range calibration of airborne profiling radar used in forest inventory. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 6672–6675. [Google Scholar]
- Ewald, F.; Groß, S.; Hagen, M.; Hirsch, L.; Delanoë, J.; Bauer-Pfundstein, M. Calibration of a 35 GHz airborne cloud radar: Lessons learned and intercomparisons with 94 GHz cloud radars. Atmos. Meas. Tech. 2019, 12, 1815–1839. [Google Scholar] [CrossRef] [Green Version]
- Münkel, C.; Eresmaa, N.; Räsänen, J.; Karppinen, A. Retrieval of mixing height and dust concentration with lidar ceilometer. Bound. Layer Meteorol. 2007, 124, 117–128. [Google Scholar] [CrossRef]
- Blumberg, W.G.; Halbert, K.T.; Supinie, T.A.; Marsh, P.T.; Thompson, R.L.; Hart, J.A. SHARPpy: An open-source sounding analysis toolkit for the atmospheric sciences. Bull. Am. Meteorol. Soc. 2017, 98, 1625–1636. [Google Scholar] [CrossRef]
- Muñoz, R.C.; Quintana, J.; Falvey, M.J.; Rutllant, J.A.; Garreaud, R. Coastal clouds at the eastern Margin of the southeast Pacific: Climatology and trends. J. Clim. 2016, 29, 4525–4542. [Google Scholar] [CrossRef]
- Wood, R. Stratocumulus clouds. Mon. Weather Rev. 2012, 140, 2373–2423. [Google Scholar] [CrossRef]
- Comstock, K.K.; Wood, R.; Yuter, S.E.; Bretherton, C.S. Reflectivity and rain rate in and below drizzling stratocumulus. Q. J. R. Meteorol. Soc. J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2004, 130, 2891–2918. [Google Scholar] [CrossRef] [Green Version]
- Uttal, T.; Kropfli, R.A. The effect of radar pulse length on cloud reflectivity statistics. J. Atmos. Ocean. Technol. 2001, 18, 947–961. [Google Scholar] [CrossRef]
- Gultepe, I.; Müller, M.D.; Boybeyi, Z. A new visibility parameterization for warm-fog applications in numerical weather prediction models. J. Appl. Meteorol. Climatol. 2006, 45, 1469–1480. [Google Scholar] [CrossRef]
- Hamazu, K.; Hashiguchi, H.; Wakayama, T.; Matsuda, T.; Doviak, R.J.; Fukao, S. A 35-GHz Scanning Doppler Radar for Fog Observations. J. Atmos. Ocean. Technol. 2003, 20, 972–986. [Google Scholar] [CrossRef]
- Protat, A.; Bouniol, D.; Delanoë, J.; O’Connor, E.; May, P.; Plana-Fattori, A.; Hasson, A.; Görsdorf, U.; Heymsfield, A. Assessment of CloudSat reflectivity measurements and ice cloud properties using ground-based and airborne cloud radar observations. J. Atmos. Ocean. Technol. 2009, 26, 1717–1741. [Google Scholar] [CrossRef] [Green Version]
- Padin, S.; Shepherd, M.; Cartwright, J.; Keeney, R.; Mason, B.; Pearson, T.; Readhead, A.; Schaal, W.; Sievers, J.; Udomprasert, P. The cosmic background imager. Publ. Astron. Soc. Pac. 2001, 114, 83. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance from Radar to UAV [m] | Backscatter Signal IF [MHz] |
|---|---|
| 200 | 3.8235 |
| 300 | 5.2941 |
| 400 | 6.7647 |
| Parameter | Variable | Value |
|---|---|---|
| Wavelength | 7.77 mm | |
| Transmitted power | 12 dBm | |
| System losses | −67.5 dB | |
| Antenna gain | 22.7 dBi | |
| Beamwidth (3 dB) | 15 degrees | |
| Range resolution | 20 m | |
| Index of refraction of water sphere | 0.93 [17] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguirre, R.; Toledo, F.; Rodríguez, R.; Rondanelli, R.; Reyes, N.; Díaz, M. Low-Cost Ka-Band Cloud Radar System for Distributed Measurements within the Atmospheric Boundary Layer. Remote Sens. 2020, 12, 3965. https://doi.org/10.3390/rs12233965
Aguirre R, Toledo F, Rodríguez R, Rondanelli R, Reyes N, Díaz M. Low-Cost Ka-Band Cloud Radar System for Distributed Measurements within the Atmospheric Boundary Layer. Remote Sensing. 2020; 12(23):3965. https://doi.org/10.3390/rs12233965
Chicago/Turabian StyleAguirre, Roberto, Felipe Toledo, Rafael Rodríguez, Roberto Rondanelli, Nicolas Reyes, and Marcos Díaz. 2020. "Low-Cost Ka-Band Cloud Radar System for Distributed Measurements within the Atmospheric Boundary Layer" Remote Sensing 12, no. 23: 3965. https://doi.org/10.3390/rs12233965