Interseismic Coupling beneath the Sikkim–Bhutan Himalaya Constrained by GPS Measurements and Its Implication for Strain Segmentation and Seismic Activity

 , , and
, , and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
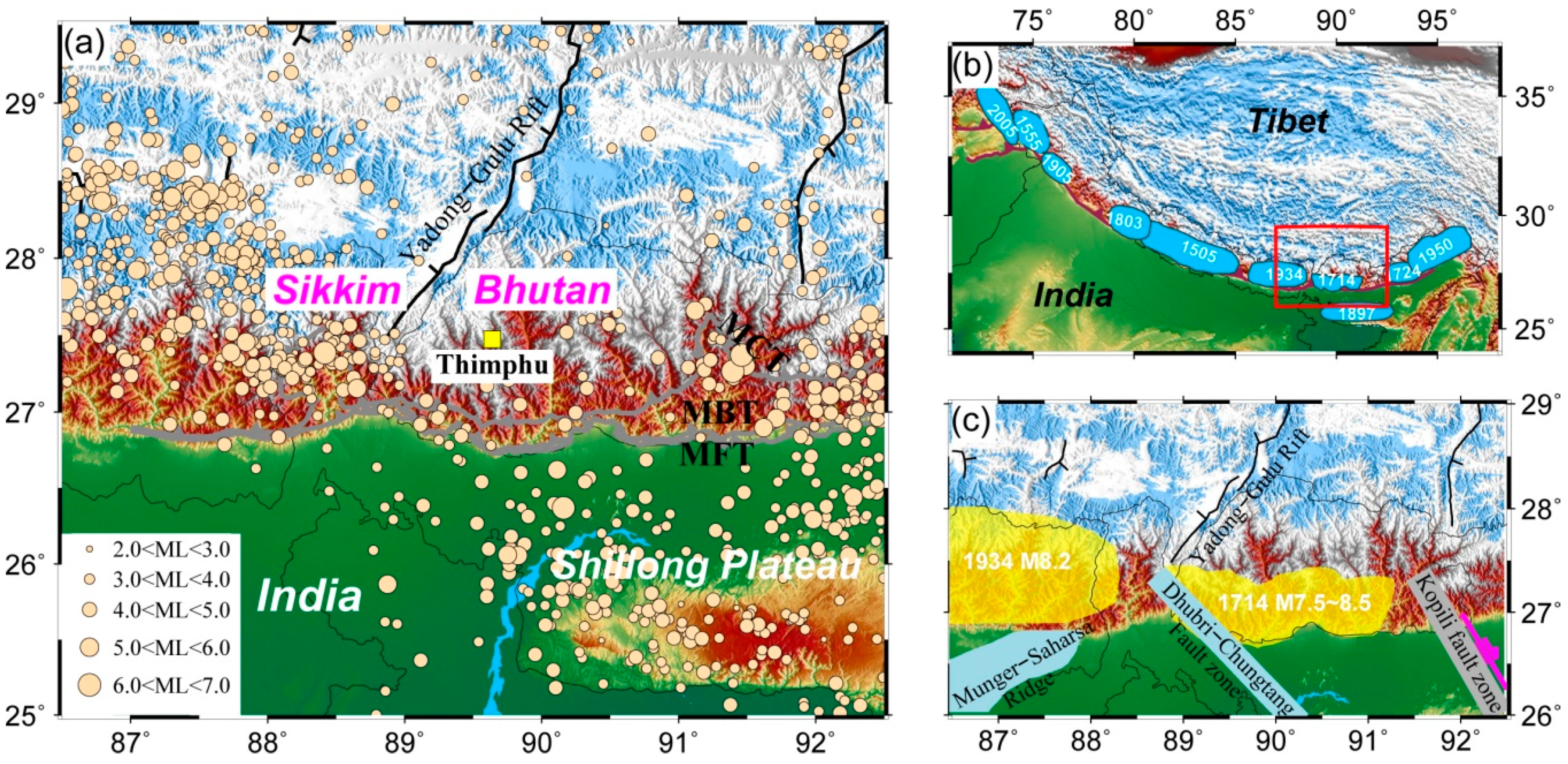
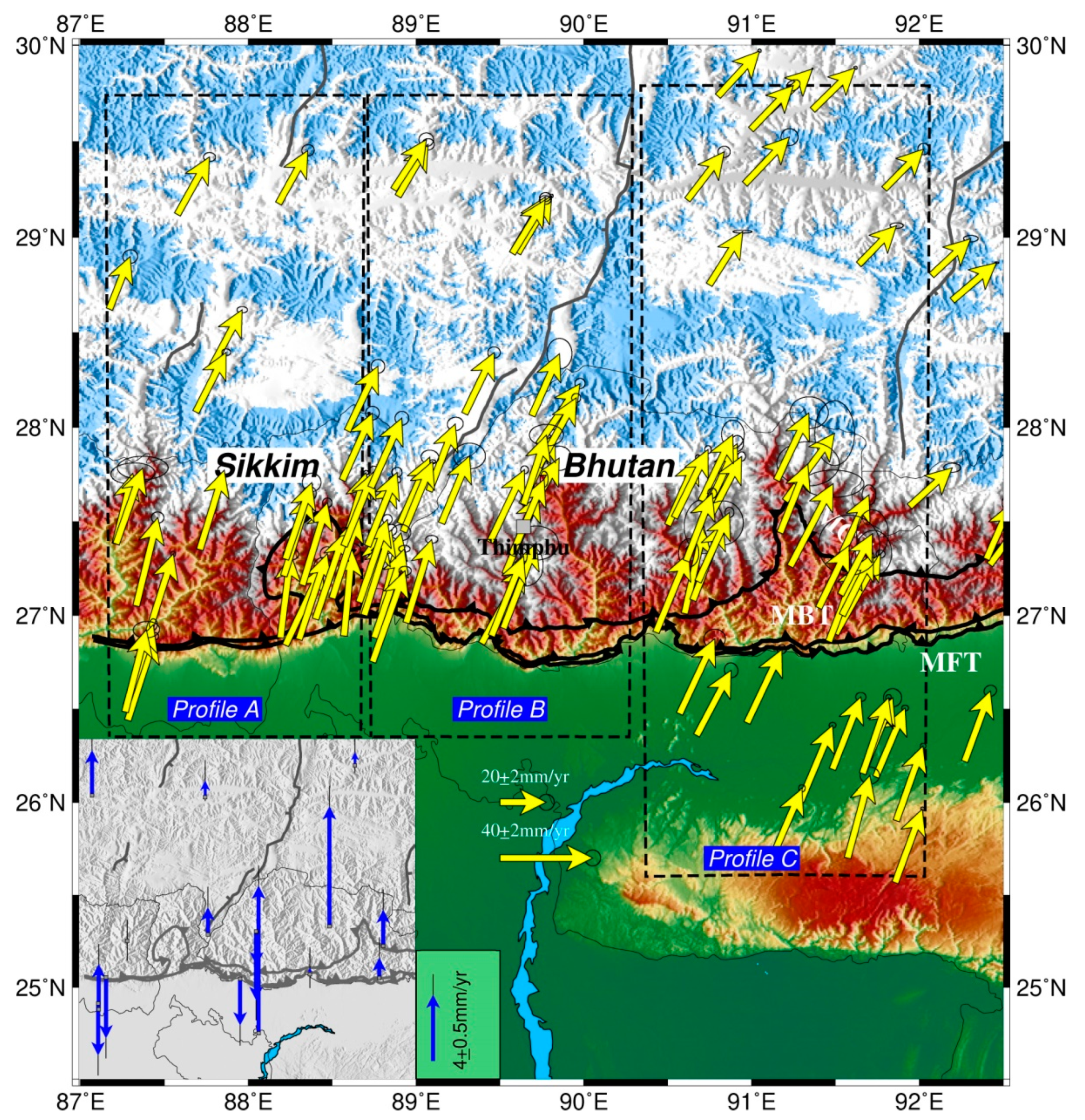
2. Seismotectonic Settings
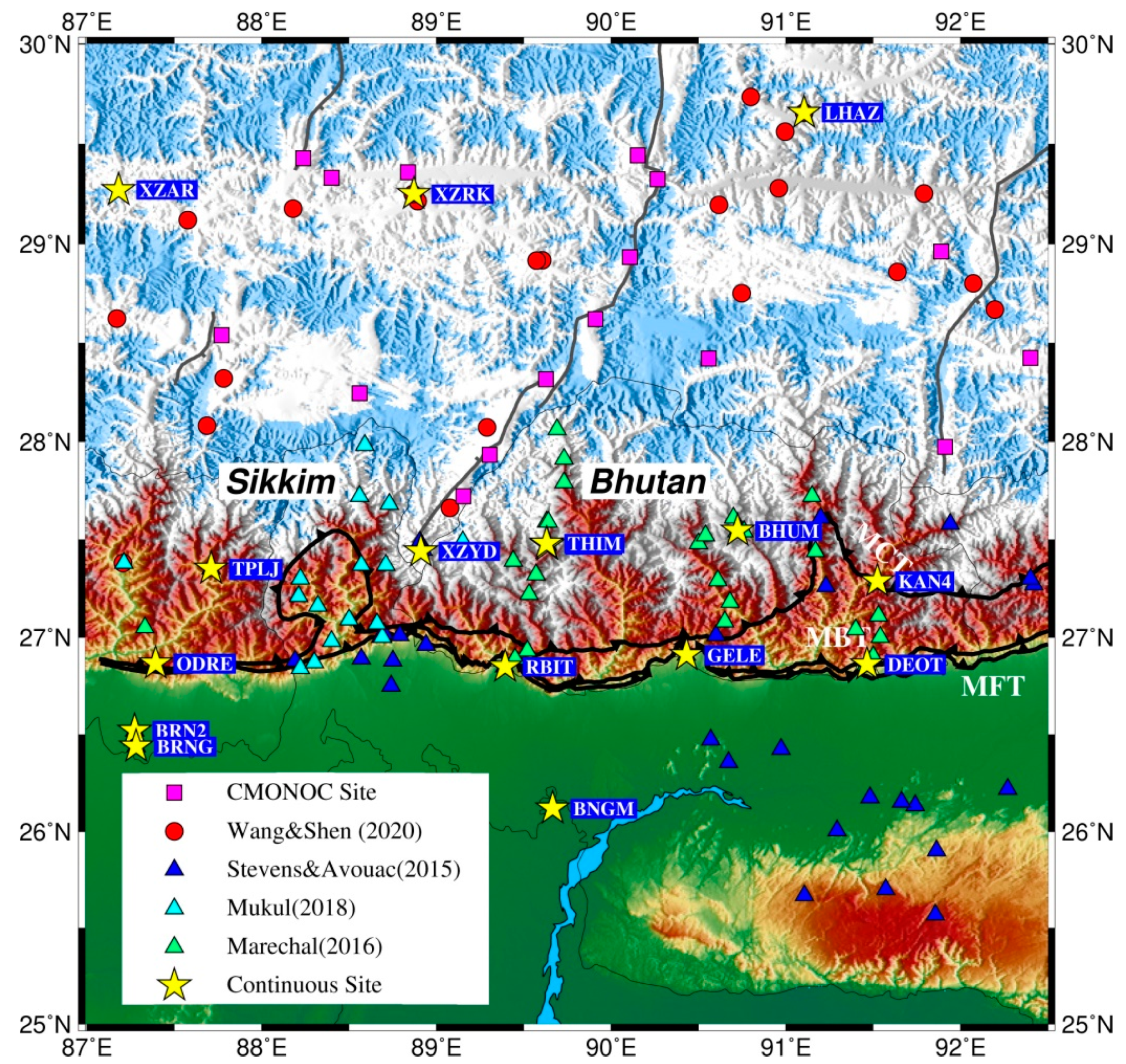
3. GPS Measurements and Velocity Estimation
3.1. GPS Data Processing
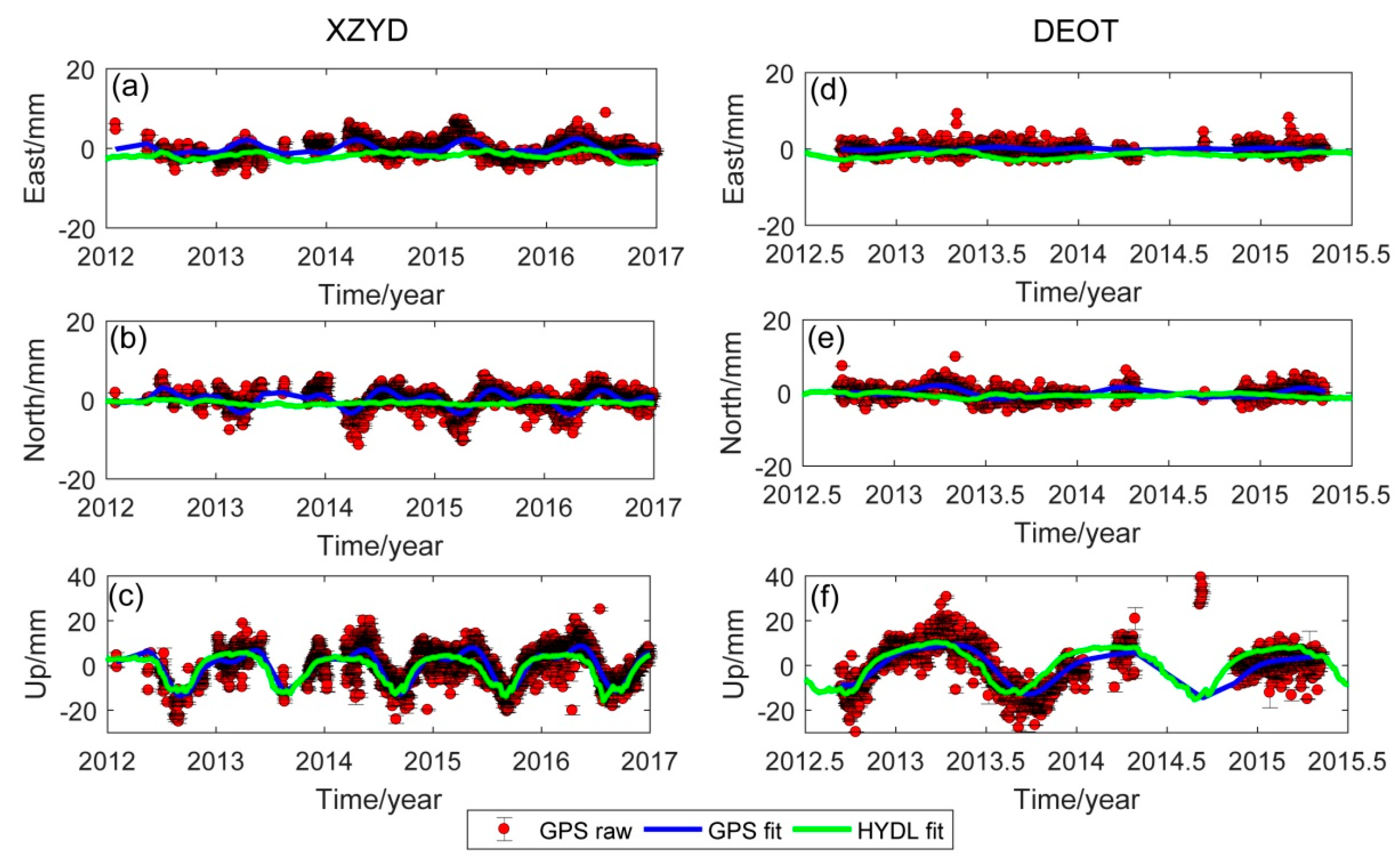
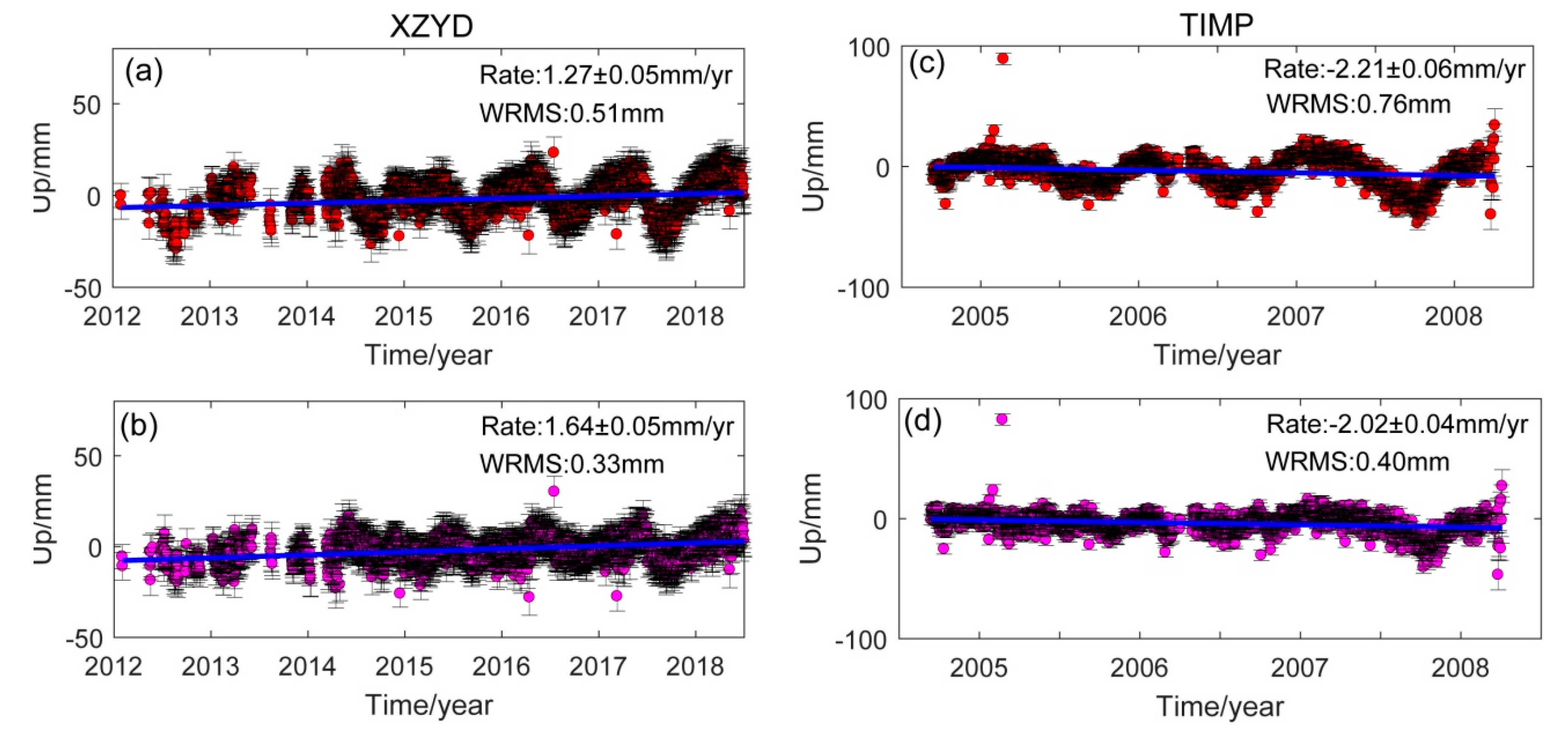
3.2. Correction Due to Hydrological loading Deformation
4. Modeling of Interseismic Coupling in the Sikkim–Bhutan Himalaya
4.1. Slip Rate on the MHT
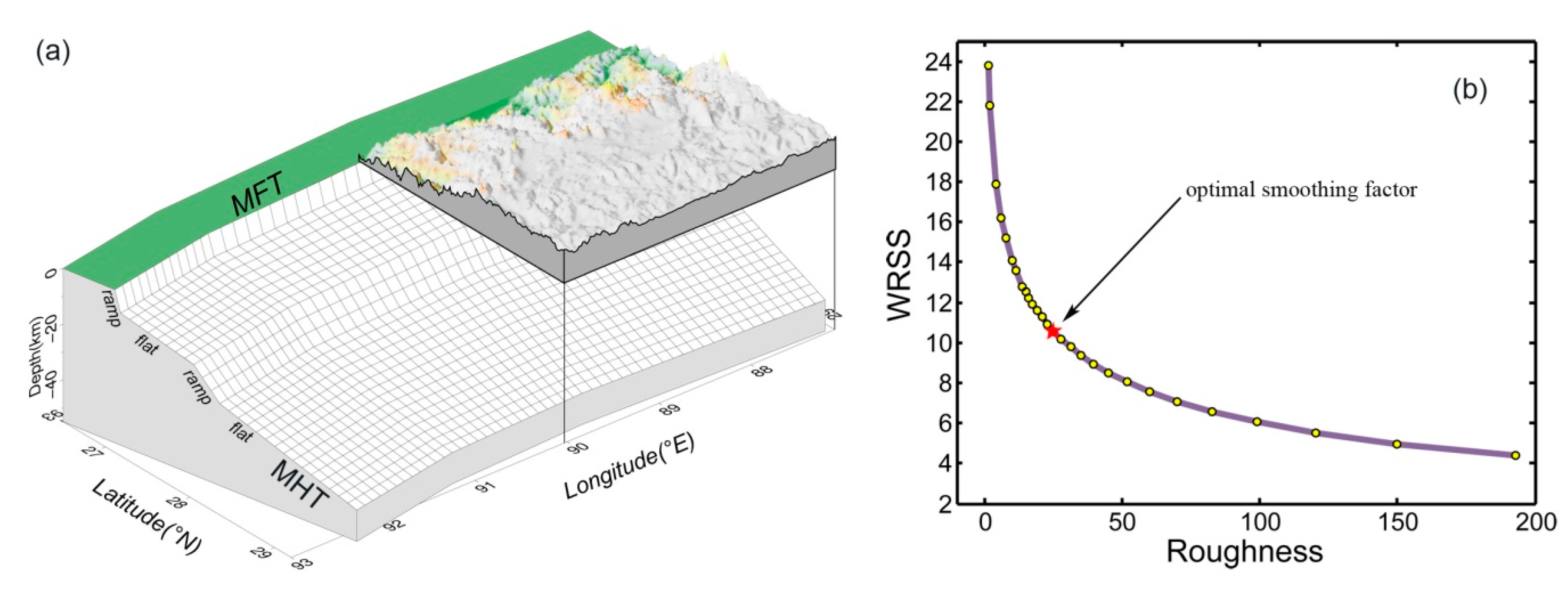
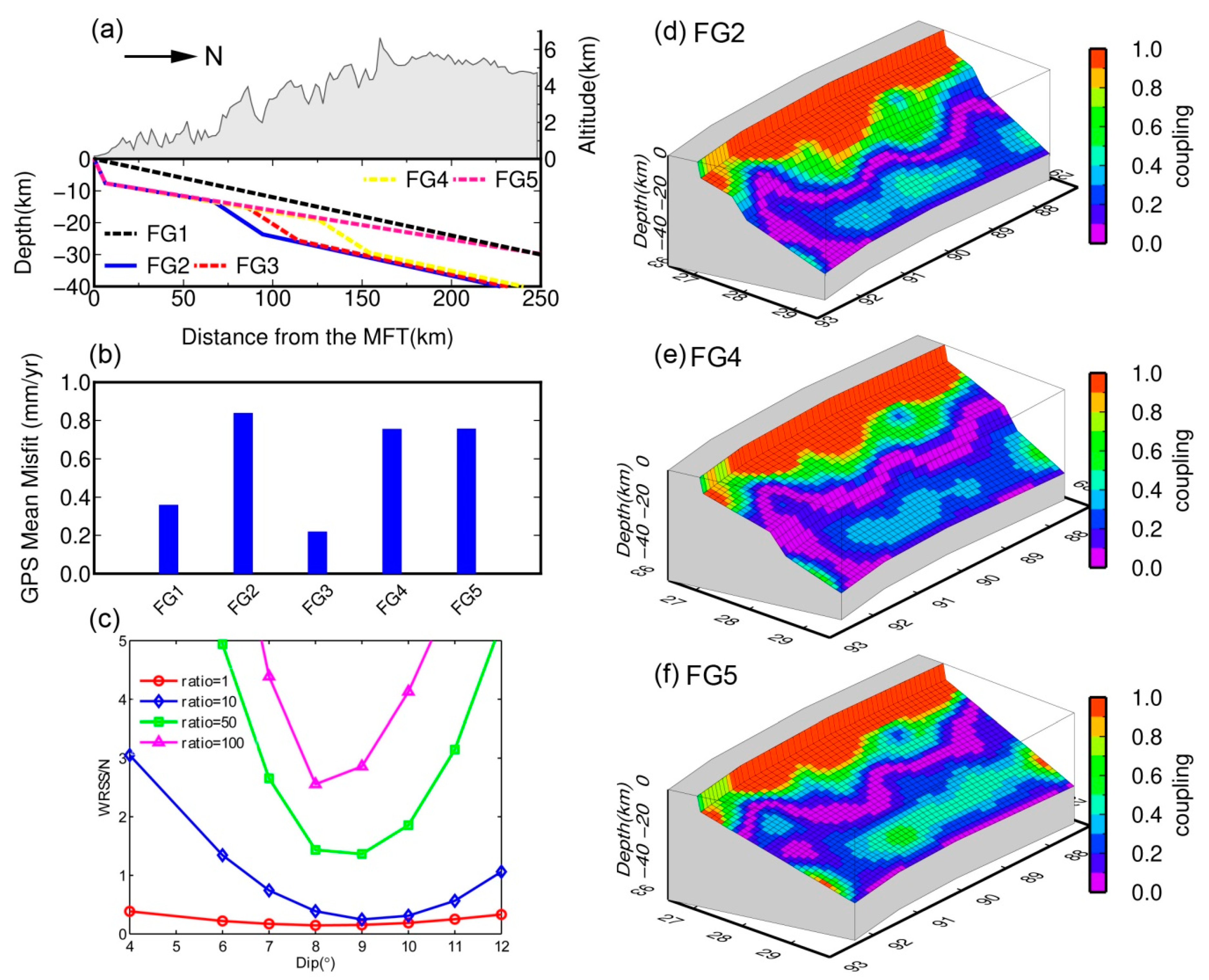
4.2. Fault Geometry of the MHT
4.3. Inversion Strategy
5. Results
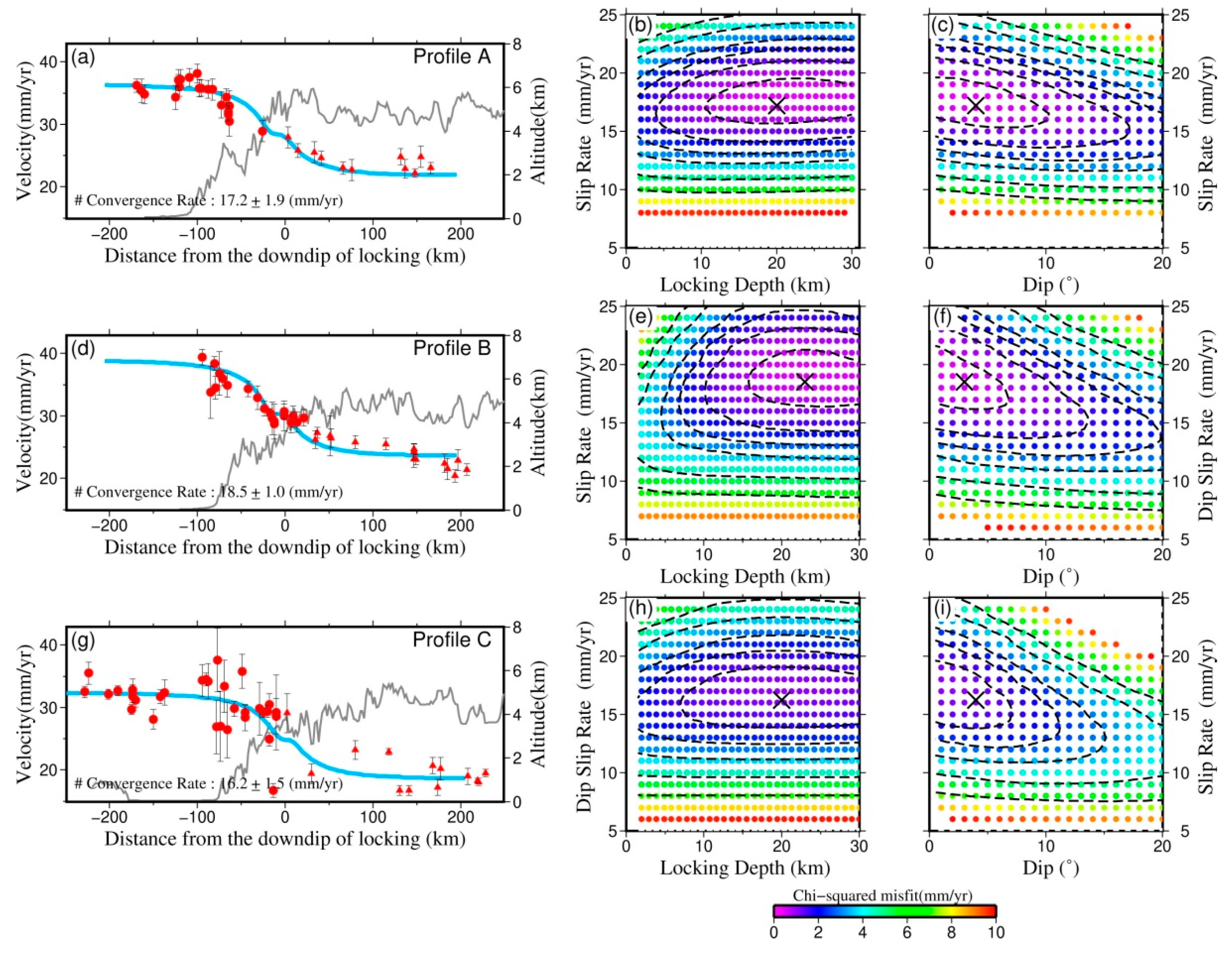
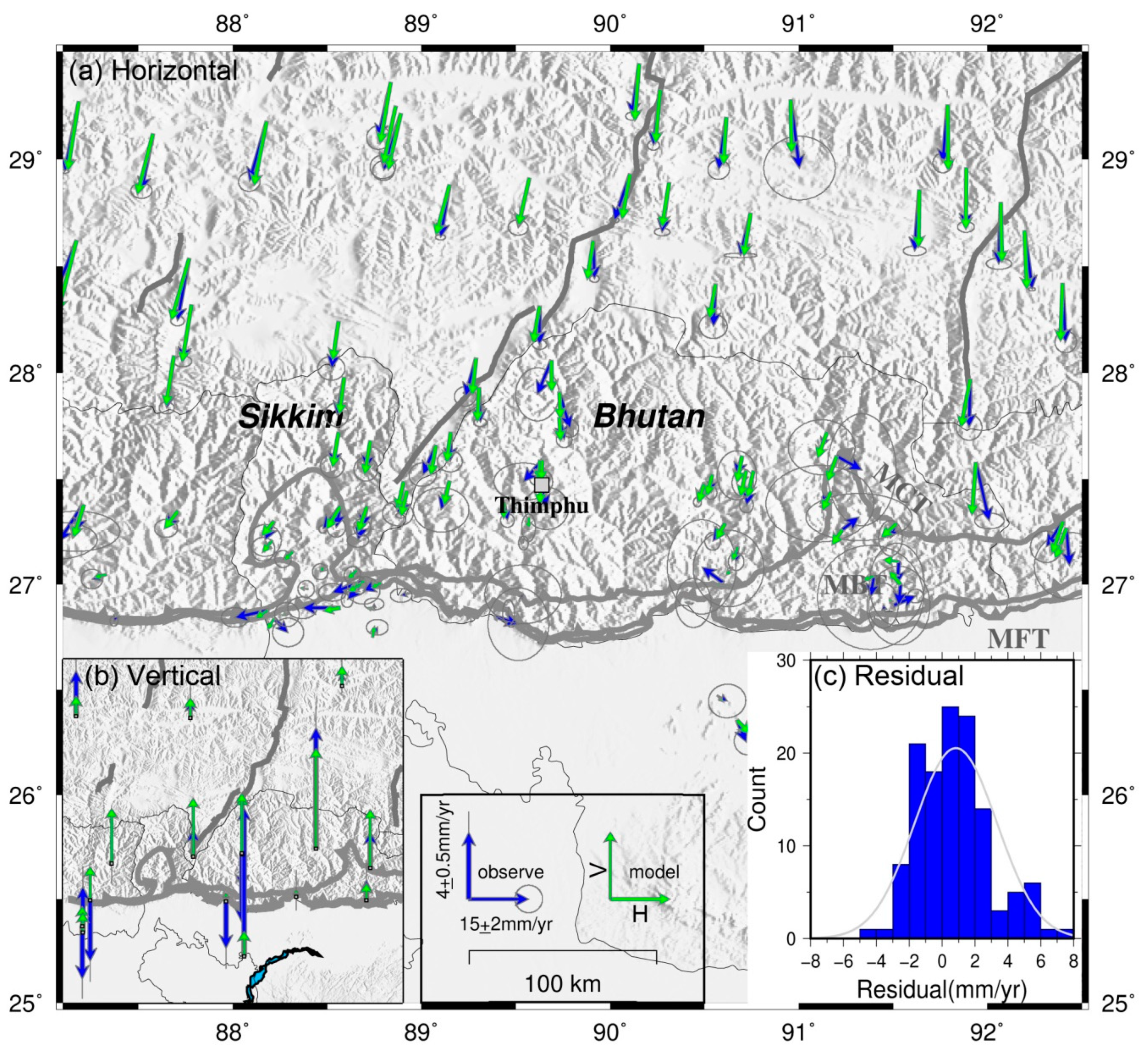
5.1. Convergence Rates across the Sikkim–Bhutan Himalaya
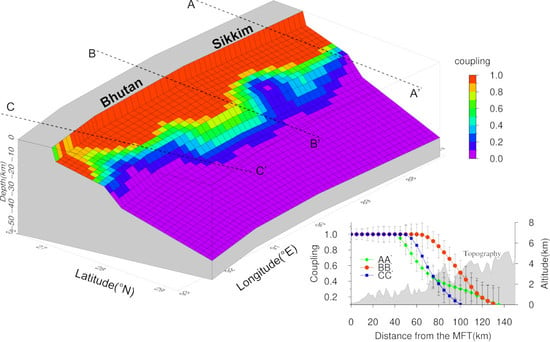
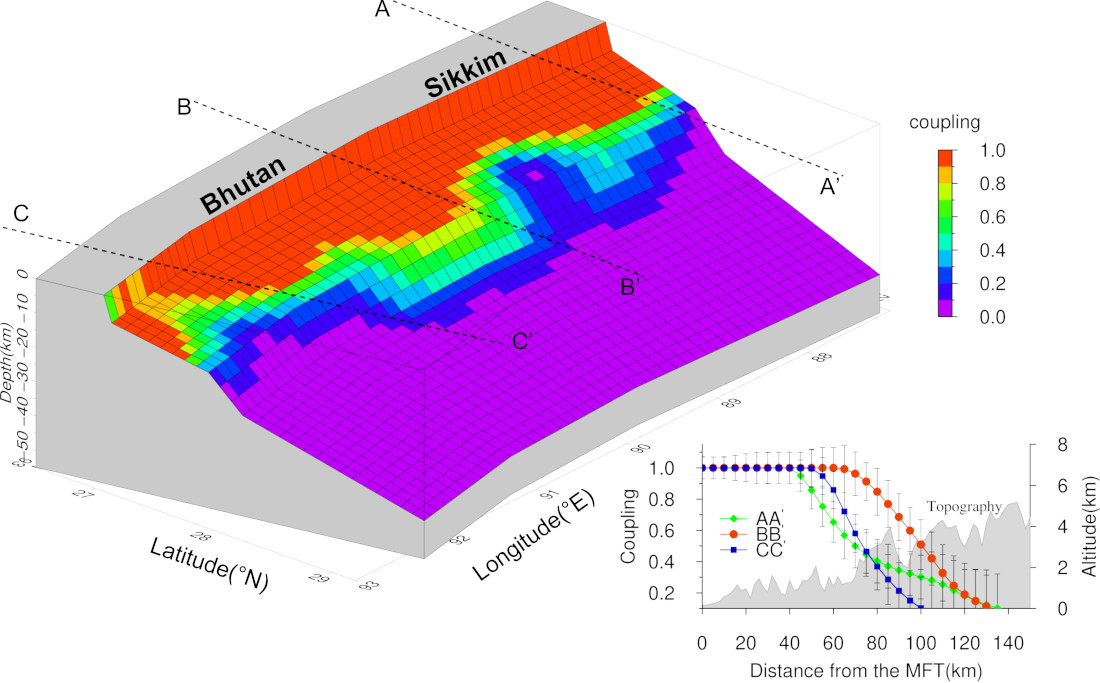
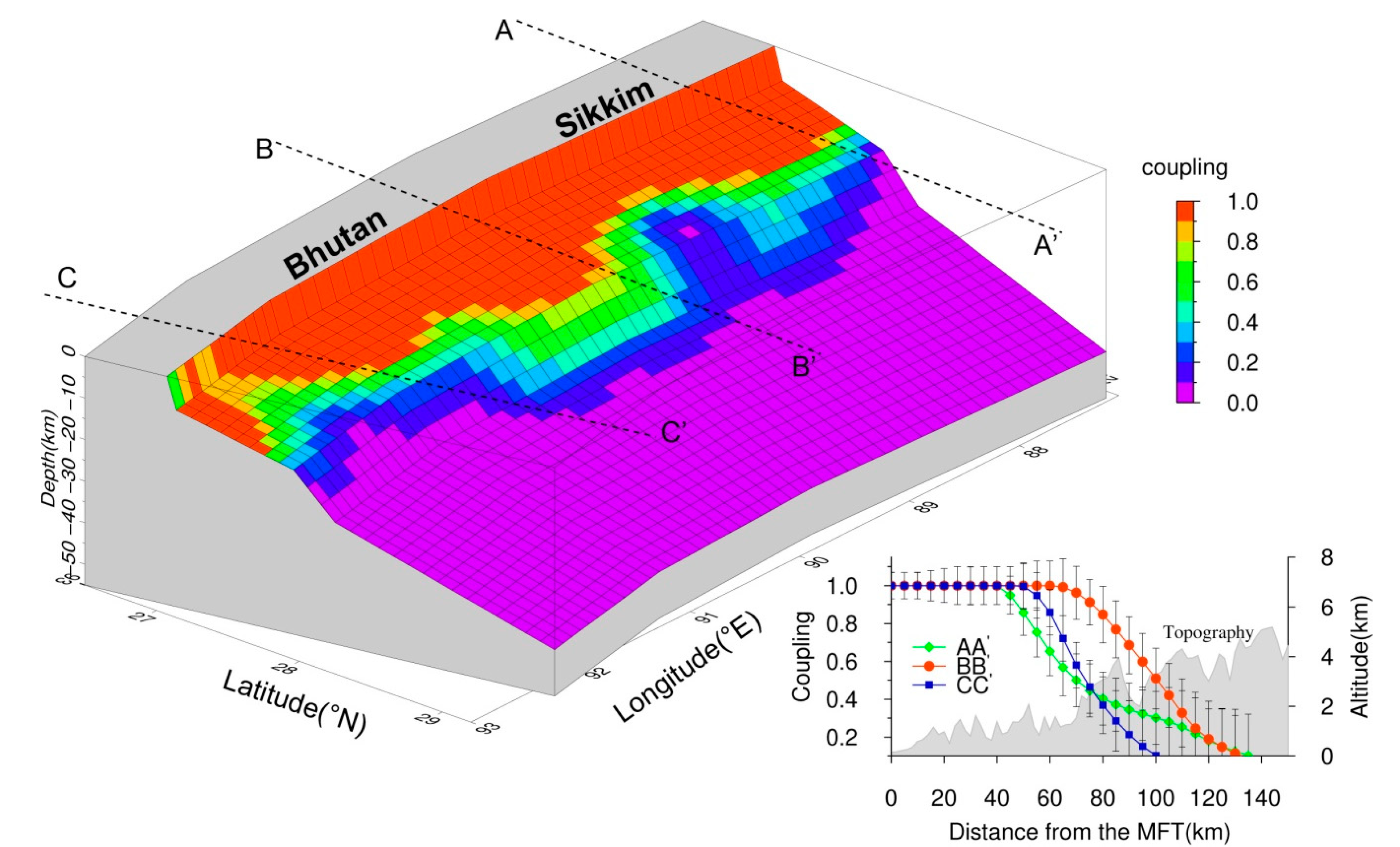
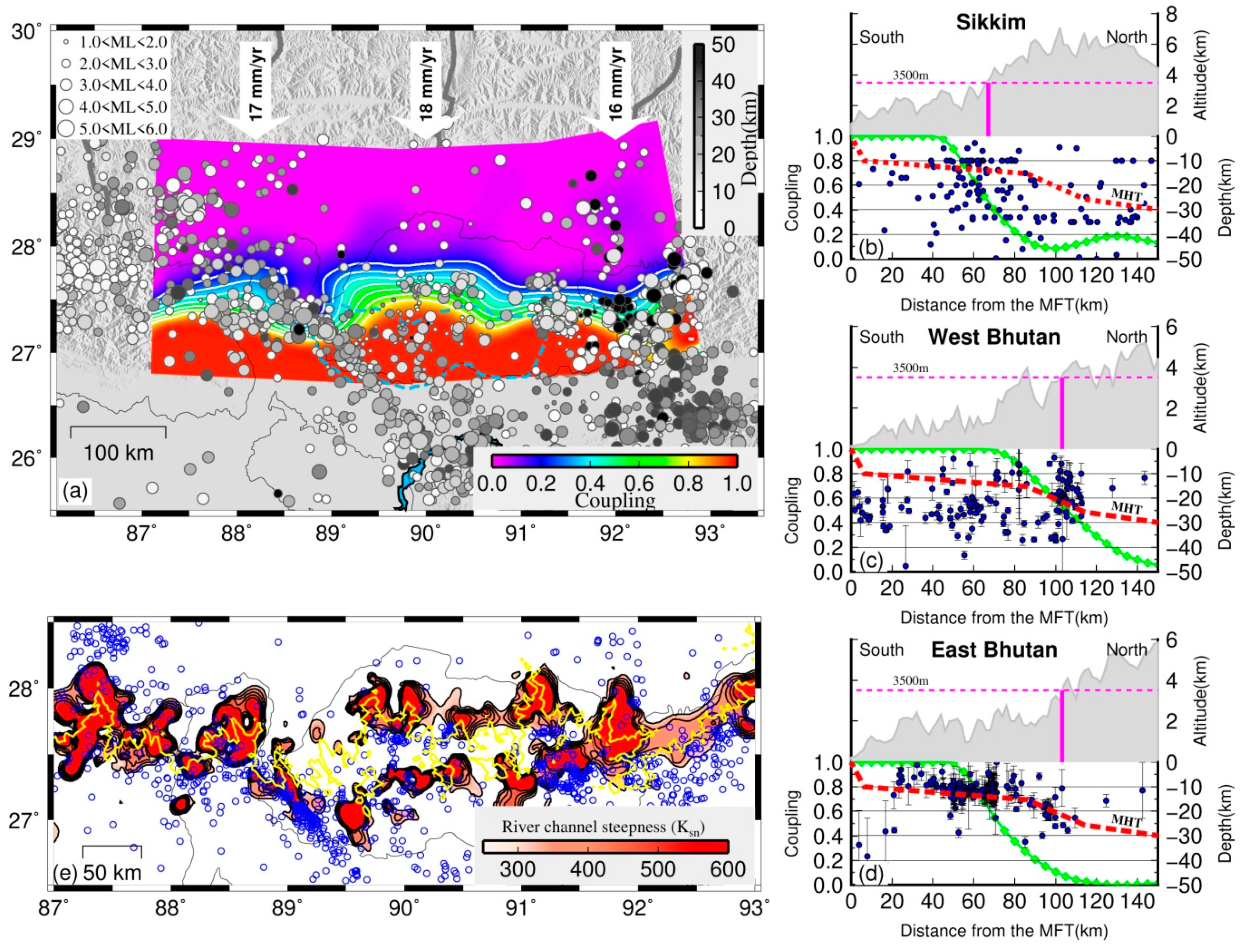
5.2. Interseismic Coupling along the MHT
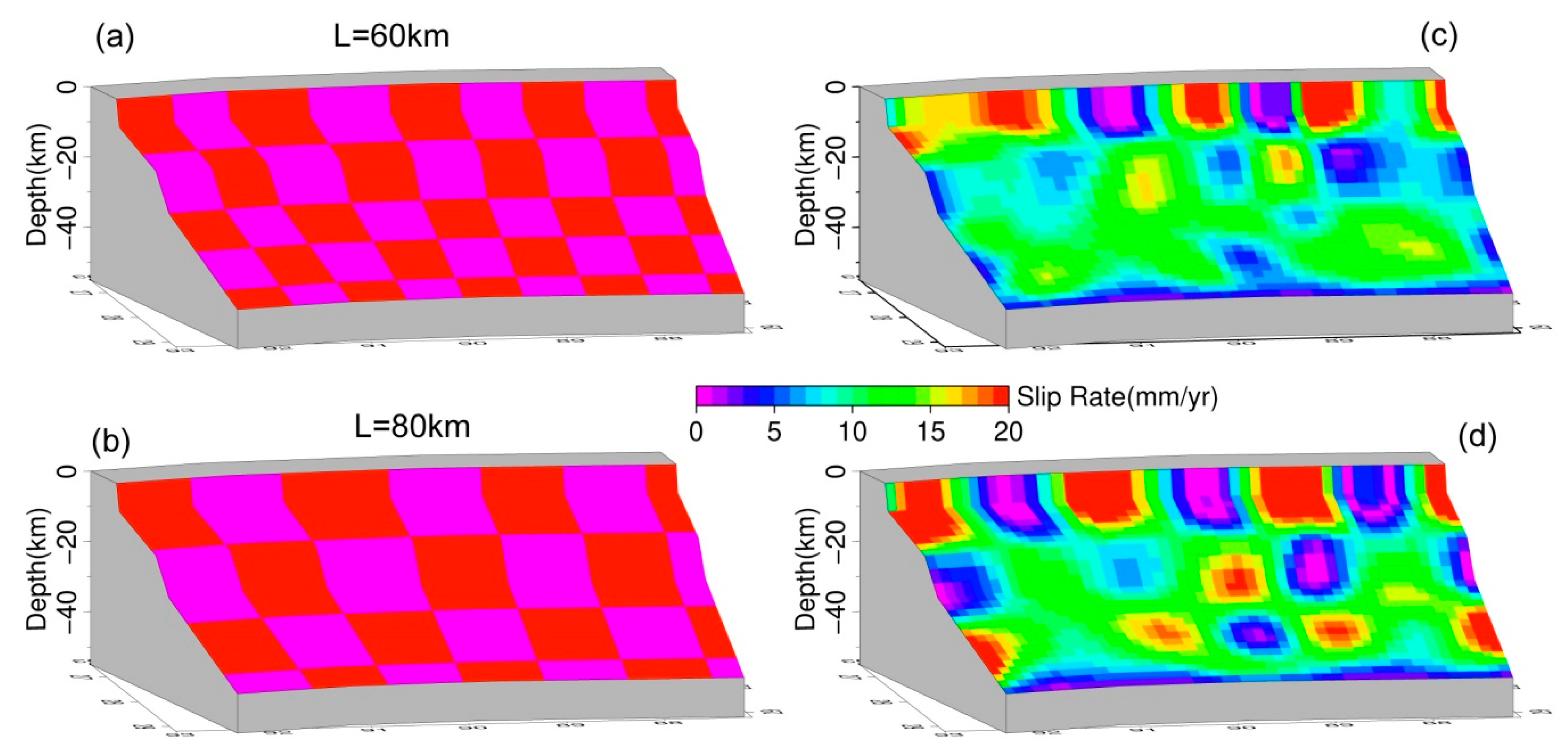
5.3. Resolution Test
6. Discussion
6.1. Effect of Fault Geometry on the Coupling Model
6.2. Connections between Interseismic Coupling, Fault Geometry and Seismic Activity
6.3. Implication for Strain Segmentation and Earthquake Hazard
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tapponnier, P.; Zhiqin, X.; Roger, F.; Meyer, B.; Arnaud, N.; Wittlinger, G.; Jingsui, Y. Oblique stepwise rise and growth of the Tibet plateau. Science 2001, 294, 1671–1677. [Google Scholar] [CrossRef]
- Avouac, J.P. Mountain building, erosion, and the seismic cycle in the Nepal Himalaya. Adv. Geophys. 2003, 46, 1–80. [Google Scholar]
- Kumar, S.; Wesnousky, S.G.; Jayangondaperumal, R.; Nakata, T.; Kumahara, Y.; Singh, V. Paleoseismological evidence of surface faulting along the northeastern Himalayan front, India: Timing, size, and spatial extent of great earthquakes. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Rajendran, K.; Parameswaran, R.M.; Rajendran, C.P. Seismotectonic perspectives on the Himalayan arc and contiguous areas: Inferences from past and recent earthquakes. Earth Sci. Rev. 2017, 173, 1–30. [Google Scholar] [CrossRef]
- Berthet, T.; Ritz, J.F.; Ferry, M.; Pelgay, P.; Cattin, R.; Drukpa, D.; Braucher, R.; Hetenyi, G. Active tectonics of the eastern Himalaya: New constraints from the first tectonic geomorphology study in southern Bhutan. Geology 2014, 42, 427–430. [Google Scholar] [CrossRef]
- Marechal, A.; Mazzotti, S.; Cattin, R.; Cazes, G.; Vernant, P.; Drukpa, D.; Thinley, K.; Tarayoun, A.; Roux-Mallouf, R.L.; Thapa, B.B. Evidence of interseismic coupling variations along the Bhutan Himalayan arc from new GPS data. Geophys. Res. Lett. 2016, 43. [Google Scholar] [CrossRef] [Green Version]
- Grujic, D.; Hetényi, G.; Cattin, R.; Baruah, S.; Benoit, A.; Drukpa, D.; Saric, A. Stress transfer and connectivity between the Bhutan Himalaya and the Shillong Plateau. Tectonophysics 2018, 744, 322–332. [Google Scholar] [CrossRef]
- Hetényi, G.; Le Roux-Mallouf, R.; Berthet, T.; Cattin, R.; Cauzzi, C.; Phuntsho, K.; Grolimund, R. Joint approach combining damage and paleoseismology observations constrains the 1714 A.D. Bhutan earthquake at magnitude 8 ± 0.5: Mind the Gap: The 1714 Bhutan Earthquake. Geophys. Res. Lett. 2016, 43, 10695–10702. [Google Scholar] [CrossRef] [Green Version]
- Gahalaut, V.K.; Rajput, S.; Kundu, B. Low seismicity in the Bhutan Himalaya and the stress shadow of the 1897 Shillong Plateau earthquake. Phys. Earth Planet. Inter. 2011, 186, 97–102. [Google Scholar] [CrossRef]
- Nalbant, S.; McCloskey, J.; Steacy, S.; Nicbhloscaidh, M.; Murphy, S. Interseismic coupling, stress evolution, and earthquake slip on the Sunda megathrust. Geophys. Res. Lett. 2013, 40, 4204–4208. [Google Scholar] [CrossRef]
- Avouac, J.-P. From Geodetic Imaging of Seismic and Aseismic Fault Slip to Dynamic Modeling of the Seismic Cycle. Annu. Rev. Earth Planet. Sci. 2015, 43, 233–271. [Google Scholar] [CrossRef] [Green Version]
- Suwa, Y.; Miura, S.; Hasegawa, A.; Sato, T.; Tachibana, K. Interplate coupling beneath NE Japan inferred from three-dimensional displacement field. J. Geophys. Res. 2006, 111, 258–273. [Google Scholar] [CrossRef]
- Chlieh, M.; Perfettini, H.; Tavera, H.; Avouac, J.P.; Remy, D.; Nocquet, J.M.; Rolandone, F.; Bondoux, F.; Gabalda, G.; Bonvalot, S. Interseismic coupling and seismic potential along the Central Andes subduction zone. J. Geophys. Res. 2011, 116, 12405. [Google Scholar] [CrossRef] [Green Version]
- Loveless, J.P.; Meade, B.J. Spatial correlation of interseismic coupling and coseismic rupture extent of the 2011 Mw = 9.0 Tohoku-oki earthquake. Geophys. Res. Lett. 2011, 38, L17306. [Google Scholar] [CrossRef] [Green Version]
- Feng, L.; Newman, A.V.; Protti, M.; González, V.; Jiang, Y.; Dixon, T.H. Active deformation near the Nicoya Peninsula, northwestern Costa Rica, between 1996 and 2010: Interseismic megathrust coupling. J. Geophys. Res. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Métois, M.; Socquet, A.; Vigny, C. Interseismic coupling, segmentation and mechanical behavior of the central Chile subduction zone. J. Geophys. Res. 2012, 117, B03406. [Google Scholar] [CrossRef] [Green Version]
- Bilham, R.; Larson, K.; Freymueller, J. GPS measurements of present-day convergence across the Nepal Himalaya. Nature 1997, 386, 61–64. [Google Scholar] [CrossRef]
- Bettinelli, P.; Avouac, J.-P.; Flouzat, M.; Jouanne, F.; Bollinger, L.; Willis, P.; Chitrakar, G.R. Plate Motion of India and Interseismic Strain in the Nepal Himalaya from GPS and DORIS Measurements. J. Geod. 2006, 80, 567–589. [Google Scholar] [CrossRef]
- Ponraj, M.; Miura, S.; Reddy, C.D.; Amirtharaj, S.; Mahajan, S.H. Slip distribution beneath the Central and Western Himalaya inferred from GPS observations. Geophys. J. Int. 2011, 185, 724–736. [Google Scholar] [CrossRef] [Green Version]
- Ader, T.; Avouac, J.-P.; Liu-Zeng, J.; Lyon-Caen, H.; Bollinger, L.; Galetzka, J.; Genrich, J.; Thomas, M.; Chanard, K.; Sapkota, S.N.; et al. Convergence rate across the Nepal Himalaya and interseismic coupling on the Main Himalayan Thrust: Implications for seismic hazard. J. Geophys. Res. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Stevens, V.L.; Avouac, J.P. Interseismic coupling on the main Himalayan thrust. Geophys. Res. Lett. 2015, 42, 5828–5837. [Google Scholar] [CrossRef] [Green Version]
- Jouanne, F.; Mugnier, J.L.; Sapkota, S.N.; Bascou, P.; Pecher, A. Estimation of coupling along the Main Himalayan Thrust in the central Himalaya. J. Asian Earth Sci. 2017, 133, 62–71. [Google Scholar] [CrossRef]
- Sreejith, K.M.; Sunil, P.S.; Agrawal, R.; Saji, A.P.; Rajawat, A.S.; Ramesh, D.S. Audit of stored strain energy and extent of future earthquake rupture in central Himalaya. Sci. Rep. 2018, 8, 16697. [Google Scholar] [CrossRef] [PubMed]
- Yadav, R.K.; Gahalaut, V.K.; Bansal, A.K.; Sati, S.P.; Catherine, J.; Gautam, P.; Kumar, K.; Rana, N. Strong seismic coupling underneath Garhwal–Kumaun region, NW Himalaya, India. Earth Planet. Sci. Lett. 2019, 506, 8–14. [Google Scholar] [CrossRef]
- Dal Zilio, L.; Jolivet, R.; van Dinther, Y. Segmentation of the Main Himalayan Thrust Illuminated by Bayesian Inference of Interseismic Coupling. Geophys. Res. Lett. 2020, 47, e2019GL086424. [Google Scholar] [CrossRef] [Green Version]
- Adams, B.A.; Hodges, K.V.; Whipple, K.X.; Ehlers, T.A.; van Soest, M.C.; Wartho, J. Constraints on the tectonic and landscape evolution of the Bhutan Himalaya from thermochronometry. Tectonics 2015, 34, 1329–1347. [Google Scholar] [CrossRef]
- Robert, X.; van der Beek, P.; Braun, J.; Perry, C.; Mugnier, J.-L. Control of detachment geometry on lateral variations in exhumation rates in the Himalaya: Insights from low-temperature thermochronology and numerical modeling. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- Vernant, P.; Bilham, R.; Szeliga, W.; Drupka, D.; Kalita, S.; Bhattacharyya, A.K.; Gaur, V.K.; Pelgay, P.; Cattin, R.; Berthet, T. Clockwise rotation of the Brahmaputra Valley relative to India: Tectonic convergence in the eastern Himalaya, Naga Hills, and Shillong Plateau. J. Geophys. Res. 2014, 119, 6558–6571. [Google Scholar] [CrossRef]
- Bilham, R.; England, P. Plateau ‘pop-up’ in the great 1897 Assam earthquake. Nature 2001, 410, 806–809. [Google Scholar] [CrossRef]
- Banerjee, P.; Bürgmann, R.; Nagarajan, B.; Apel, E. Intraplate deformation of the Indian subcontinent. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Lavé, J.; Avouac, J.P. Fluvial incision and tectonic uplift across the Himalayas of central Nepal. J. Geophys. Res. 2001, 106, 26561–26591. [Google Scholar] [CrossRef]
- Velasco, A.; Gee, V.L.; Rowe, C.; Grujic, D.; Hollister, L.; Hernández, D.; Miller, K.; Tobgay, T.; Fort, M.; Harder, S. Using Small, Temporary Seismic Networks for Investigating Tectonic Deformation: Brittle Deformation and Evidence for Strike-Slip Faulting in Bhutan. Seismol. Res. Lett. 2007, 78, 446–453. [Google Scholar] [CrossRef] [Green Version]
- Diehl, T.; Singer, J.; Hetényi, G.; Grujic, D.; Clinton, J.; Giardini, D.; Kissling, E. Seismotectonics of Bhutan: Evidence for segmentation of the Eastern Himalayas and link to foreland deformation. Earth Planet. Sci. Lett. 2017, 471, 54–64. [Google Scholar] [CrossRef] [Green Version]
- Jade, S.; Bhatt, B.C.; Yang, Z.; Bendick, R.; Gaur, V.K.; Molnar, P.; Anand, M.B.; Kumar, D. GPS measurements from the Ladakh Himalaya, India: Preliminary tests of plate-like or continuous deformation in Tibet. Geol. Soc. Am. Bull. 2004, 116, 1385–1391. [Google Scholar] [CrossRef]
- Mullick, M.; Riguzzi, F.; Mukhopadhyay, D. Estimates of motion and strain rates across active faults in the frontal part of eastern Himalayas in North Bengal from GPS measurements. Terra Nova 2009, 21, 410–415. [Google Scholar] [CrossRef]
- Mukul, M.; Jade, S.; Ansari, K.; Matin, A.; Joshi, V. Structural insights from geodetic Global Positioning System measurements in the Darjiling-Sikkim Himalaya. J. Struct. Geol. 2018, 114, 346–356. [Google Scholar] [CrossRef]
- Zheng, G.; Wang, H.; Wright, T.J.; Lou, Y.; Zhang, R.; Zhang, W.; Shi, C.; Huang, J.; Wei, N. Crustal Deformation in the India-Eurasia Collision Zone From 25 Years of GPS Measurements. J. Geophys. Res. 2017, 122, 9290–9312. [Google Scholar] [CrossRef]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Wang, Q.; Chen, G.; He, P.; Ding, K.; Chen, Y.; Zou, R. Interseismic Coupling in the Central Nepalese Himalaya: Spatial Correlation with the 2015 Mw 7.9 Gorkha Earthquake. Pure Appl. Geophys. 2019, 176, 3893–3911. [Google Scholar] [CrossRef]
- Wang, M.; Shen, Z.-K. Present-Day Crustal Deformation of Continental China Derived From GPS and Its Tectonic Implications. J. Geophys. Res. 2020, 125, e2019JB018774. [Google Scholar] [CrossRef] [Green Version]
- Fu, Y.; Freymueller, J.T. Seasonal and long-term vertical deformation in the Nepal Himalaya constrained by GPS and GRACE measurements. J. Geophys. Res. 2012, 117. [Google Scholar] [CrossRef]
- Dill, R.; Dobslaw, H. Numerical simulations of global-scale high-resolution hydrological crustal deformations. J. Geophys. Res. 2013, 118, 5008–5017. [Google Scholar] [CrossRef]
- Altamimi, Z.; Métivier, L.; Collilieux, X. ITRF2008 plate motion model. J. Geophys. Res. 2012, 117. [Google Scholar] [CrossRef]
- Savage, J.C. A dislocation model of strain accumulation and release at a subduction zone. J. Geophys. Res. 1983, 88, 4984–4996. [Google Scholar] [CrossRef]
- Acton, C.E.; Priestley, K.; Mitra, S.; Gaur, V.K. Crustal structure of the Darjeeling—Sikkim Himalaya and southern Tibet. Geophys. J. Int. 2011, 184, 829–852. [Google Scholar] [CrossRef] [Green Version]
- Nábělek, J. Underplating in the Himalaya-Tibet collision zone revealed by the Hi-CLIMB Experiment. Science 2009, 325, 1371–1374. [Google Scholar] [CrossRef]
- Hauck, M.L.; Nelson, K.D.; Brown, L.D.; Zhao, W.; Ross, A.R. Crustal structure of the Himalayan orogen at ∼90° east longitude from Project INDEPTH deep reflection profiles. Tectonics 1998, 17, 481–500. [Google Scholar] [CrossRef]
- Singer, J.; Kissling, E.; Diehl, T.; Hetényi, G. The underthrusting Indian crust and its role in collision dynamics of the Eastern Himalaya in Bhutan: Insights from receiver function imaging. J. Geophys. Res. 2017, 122, 1152–1178. [Google Scholar] [CrossRef]
- Le Roux-Mallouf, R.; Godard, V.; Cattin, R.; Ferry, M.; Gyeltshen, J.; Ritz, J.-F.; Drupka, D.; Guillou, V.; Arnold, M.; Aumaître, G.; et al. Evidence for a wide and gently dipping Main Himalayan Thrust in western Bhutan. Geophys. Res. Lett. 2015, 42, 3257–3265. [Google Scholar] [CrossRef] [Green Version]
- Coutand, I.; Whipp, D.M., Jr.; Grujic, D.; Bernet, M.; Fellin, M.G.; Bookhagen, B.; Landry, K.R.; Ghalley, S.K.; Duncan, C. Geometry and kinematics of the Main Himalayan Thrust and Neogene crustal exhumation in the Bhutanese Himalaya derived from inversion of multithermochronologic data. J. Geophys. Res. 2014, 119, 1446–1481. [Google Scholar] [CrossRef]
- Singer, J.; Obermann, A.; Kissling, E.; Fang, H.; Hetényi, G.; Grujic, D. Along-strike variations in the Himalayan orogenic wedge structure in Bhutan from ambient seismic noise tomography. Geochem. Geophys. Geosyst. 2017, 18, 1483–1498. [Google Scholar] [CrossRef]
- Long, S.P.; McQuarrie, N.; Tobgay, T.; Coutand, I.; Cooper, F.J.; Reiners, P.W.; Wartho, J.-A.; Hodges, K.V. Variable shortening rates in the eastern Himalayan thrust belt, Bhutan: Insights from multiple thermochronologic and geochronologic data sets tied to kinematic reconstructions. Tectonics 2012, 31. [Google Scholar] [CrossRef]
- Meade, B.J.; Hager, B.H. Block Models of Crustal Motion in Southern California Constrained by GPS Measurements. J. Geophys. Res. 2005, 110, 353. [Google Scholar] [CrossRef]
- Armijo, R.; Tapponnier, P.; Mercier, J.L.; Han, T.L. Quaternary extension in southern Tibet: Field observations and tectonic implications. J. Geophys. Res. 1986, 91, 13803–13872. [Google Scholar] [CrossRef]
- Vergne, J.; Cattin, R.; Avouac, J.P. On the use of dislocations to model interseismic strain and stress build-up at intracontinental thrust faults. Geophys. J. Int. 2001, 147, 155–162. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Qiao, X.; Lan, Q.; Jeffrey, F.; Yang, S.; Xu, C.; Yang, Y.; You, X.; Tan, K.; Chen, G. Rupture of deep faults in the 2008 Wenchuan earthquake and uplift of the Longmen Shan. Nat. Geosci. 2011, 4, 634–640. [Google Scholar]
- Liu, C.; Ji, L.; Zhu, L.; Zhao, C. InSAR-Constrained Interseismic Deformation and Potential Seismogenic Asperities on the Altyn Tagh Fault at 91.5–95°E, Northern Tibetan Plateau. Remote Sens. 2018, 10, 943. [Google Scholar] [CrossRef] [Green Version]
- Okada, Y. Surface deformation due to shear and tensile faults in a half-space. Bull. Seismol. Soc. Am. 1985, 75, 1135–1154. [Google Scholar]
- Lawson, C.L.; Hanson, R.J. Solving Least Squares Problems; PRENTICE-HALL: Upper Saddle River, NJ, USA, 1974; pp. 673–682. [Google Scholar]
- Sapkota, S.N. Primary surface ruptures of the great Himalayan earthquakes in 1934 and 1255. Nat. Geosci. 2013, 6, 71–76. [Google Scholar] [CrossRef]
- Lindsey, E.O.; Almeida, R.; Mallick, R.; Hubbard, J.; Bradley, K.; Tsang, L.L.H.; Liu, Y.; Burgmann, R.; Hill, E.M. Structural Control on Downdip Locking Extent of the Himalayan Megathrust. J. Geophys. Res. 2018, 123, 5265–5278. [Google Scholar] [CrossRef]
- Burgess, W.P.; Yin, A.; Dubey, C.S.; Shen, Z.K.; Kelty, T.K. Holocene shortening across the Main Frontal Thrust zone in the eastern Himalaya. Earth Planet. Sci. Lett. 2012, 357–358, 152–167. [Google Scholar] [CrossRef]
- Bilham, R.; Mencin, D.; Bendick, R.; Bürgmann, R. Implications for elastic energy storage in the Himalaya from the Gorkha 2015 earthquake and other incomplete ruptures of the Main Himalayan Thrust. Quat. Int. 2017, 462, 3–21. [Google Scholar] [CrossRef]
- Lay, T.; Kanamori, H.; Ammon, C.J.; Koper, K.D.; Hutko, A.R.; Ye, L.; Yue, H.; Rushing, T.M. Depth-varying rupture properties of subduction zone megathrust faults. J. Geophys. Res. 2012, 117. [Google Scholar] [CrossRef]
- Li, S.; Wang, Q.; Yang, S.; Qiao, X.; Nie, Z.; Zou, R.; Ding, K.; He, P.; Chen, G. Geodetic imaging mega-thrust coupling beneath the Himalaya. Tectonophysics 2018, 747–748, 225–238. [Google Scholar] [CrossRef]
- Grandin, R.; Doin, M.P.; Bollinger, L.; Pinel-Puyssegur, B.; Ducret, G.; Jolivet, R.; Sapkota, S.N. Long-term growth of the Himalaya inferred from interseismic InSAR measurement. Geology 2012, 40, 1059–1062. [Google Scholar] [CrossRef] [Green Version]
- Yue, H.; Simons, M.; Duputel, Z.; Jiang, J.; Fielding, E.; Liang, C.; Owen, S.; Moore, A.; Riel, B.; Ampuero, J.P. Depth varying rupture properties during the 2015 Mw 7.8 Gorkha (Nepal) earthquake. Tectonophysics 2016, 714–715, 44–54. [Google Scholar] [CrossRef] [Green Version]
- Storchak, D.A.; Di Giacomo, D.; Bondár, I.; Engdahl, E.R.; Harris, J.; Lee, W.H.K.; Villaseñor, A.; Bormann, P. Public Release of the ISC-GEM Global Instrumental Earthquake Catalogue (1900–2009). Seismol. Res. Lett. 2013, 84, 810–815. [Google Scholar] [CrossRef] [Green Version]
- Hazarika, P.; Kumar, M.; Gudhimella, S.; Raju, P.; Rao, N.; Srinagesh, D. Transverse Tectonics in the Sikkim Himalaya: Evidence from Seismicity and Focal-Mechanism Data. Bull. Seismol. Soc. Am. 2010, 100, 1816–1822. [Google Scholar] [CrossRef]
- Cannon, J.M.; Murphy, M.A.; Taylor, M. Segmented strain accumulation in the High Himalaya expressed in river channel steepness. Geosphere 2018, 14, 1131–1149. [Google Scholar] [CrossRef] [Green Version]
- Pandey, M.R.; Tandukar, R.P.; Avouac, J.P.; Vergne, J.; Héritier, T. Seismotectonics of the Nepal Himalaya from a local seismic network. J. Asian Earth Sci. 1999, 17, 703–712. [Google Scholar] [CrossRef]
- Gahalaut, V.K.; Kundu, B. Possible influence of subducting ridges on the Himalayan arc and on the ruptures of great and major Himalayan earthquakes. Gondwana Res. 2012, 21, 1080–1088. [Google Scholar] [CrossRef]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Tao, T.; Gao, F.; Qu, X.; Zhu, Y.; Huang, J.; Wang, Q. Interseismic Coupling beneath the Sikkim–Bhutan Himalaya Constrained by GPS Measurements and Its Implication for Strain Segmentation and Seismic Activity. Remote Sens. 2020, 12, 2202. https://doi.org/10.3390/rs12142202
Li S, Tao T, Gao F, Qu X, Zhu Y, Huang J, Wang Q. Interseismic Coupling beneath the Sikkim–Bhutan Himalaya Constrained by GPS Measurements and Its Implication for Strain Segmentation and Seismic Activity. Remote Sensing. 2020; 12(14):2202. https://doi.org/10.3390/rs12142202
Chicago/Turabian StyleLi, Shuiping, Tingye Tao, Fei Gao, Xiaochuan Qu, Yongchao Zhu, Jianwei Huang, and Qi Wang. 2020. "Interseismic Coupling beneath the Sikkim–Bhutan Himalaya Constrained by GPS Measurements and Its Implication for Strain Segmentation and Seismic Activity" Remote Sensing 12, no. 14: 2202. https://doi.org/10.3390/rs12142202