1. Introduction
Wetlands are regions where water is the main factor affecting the ecosystem and the associated flora and fauna [
1]. In such an environment, the water table is either at or near to the land surface or the land surface is covered by shallow-water [
2]. Wetlands are natural infrastructures that facilitate the interactions of soils, water, plants, and animals, thus making them one of the most productive ecosystems. Wetlands serve a number of purposes, including water storage and purification, flood mitigation, storm protection, erosion control, shoreline stabilization, carbon dioxide sequestration, and climate regulation [
3]. To support global preservation of wetlands, the Ramsar Convention on Wetlands has been in place since 1971, wherein the main purpose is “the conservation and wise use of wetlands globally” [
1]. Over the years, several countries (163 nations as of January 2013), including Canada, have joined to the convention and demonstrated their commitments to wetland preservation.
Over the past two decades, remote sensing tools and data have significantly contributed to wetland mapping and monitoring [
4]. Optical remote sensing satellites have long been the main source of Earth Observation (EO) data for vegetation and wetland mapping [
5,
6], yet cloud cover hinders the acquisition of such data. Consequently, as they are not impacted by solar radiation or weather conditions and can penetrate vegetation canopies (depending on wavelength), Synthetic Aperture Radar (SAR) sensors are of special interest, particularly in geographic regions with chronic cloud cover, such as Canada [
7]. The interaction of SAR signal with vegetation canopies depends on SAR wavelengths [
8]. Overall, longer wavelengths (e.g., L-band) are preferred for monitoring woody wetlands [
8], whereas shorter wavelengths (e.g., C- and X-band) are useful for mapping herbaceous wetlands [
9]. Several studies reported of great benefit of L-band data collected by JERS-1 and ALOS PALSAR-1 for inundation and vegetation dynamic mapping in various geographic locations, such as the Amazon floodplain [
10,
11], the Alligator Rivers region of northern Australia [
12], and wetlands in Africa [
13]. Other studies demonstrated the capability of shorter wavelengths, such as C-band data collected by ERS-1/2 [
14], RADARSAT-1 [
15], RADARSAT-2 [
16,
17], and Sentinel-1 [
18] for wetland classification. X-band data collected by TerraSAR-X were also found to be useful for mapping heterogeneous structure of wetland ecosystems and their dynamics, given its high temporal and spatial resolution [
19,
20].
Wetland phenology also affects SAR backscattering responses of flooded vegetation and depends on complex relation of vegetation height/density and the water level height in the wetland ecosystem [
21]. For example, during high water seasons, the classes of swamp forest and freshwater marsh experience different conditions. In particular, an increase in water level height increases the chance of double-bounce scattering for swamps, resulting in an enhanced SAR backscattering response [
22]. In contrast, an increase in water level height may decrease the chance of double-bounce scattering for marshes, as it converts double-bounce scattering to the specular scattering mechanism [
23]. This results in little backscattering responses on SAR imagery in this case. Vegetative density is another influential factor and was examined in several research. For example, Lu and Known (2008) found that high vegetative density and canopy in swamp forest during the leaf-on season converted double-bounce scattering to volume scattering in southeastern coastal Louisiana wetlands using ERS and RADARSAT-1 imagery, which decreased SAR backscattering responses over swamp forest [
24]. Later studies, such as [
25,
26], found relatively similar results using ALOS PALSAR L-band data for forested wetlands in the Congo River in Africa.
In addition to SAR wavelength and wetland phenology, polarization of SAR signal is also an important factor. Given the capability of full-polarimetric (FP) SAR sensors to collect full scattering information of ground targets, the potential of these sensors for mapping various wetland classes has been well established [
27]. In particular, a FP SAR sensor transmits a fully-polarized signal toward ground targets while receiving both fully-polarized and depolarized backscattering responses from a ground target [
28]. This configuration also maintains the relative phase between polarization channels, thus allowing the application of advanced polarimetric decomposition methods [
29]. The polarimetric decompositions are beneficial for distinguishing similar wetland classes through characterizing various scattering mechanisms of ground targets.
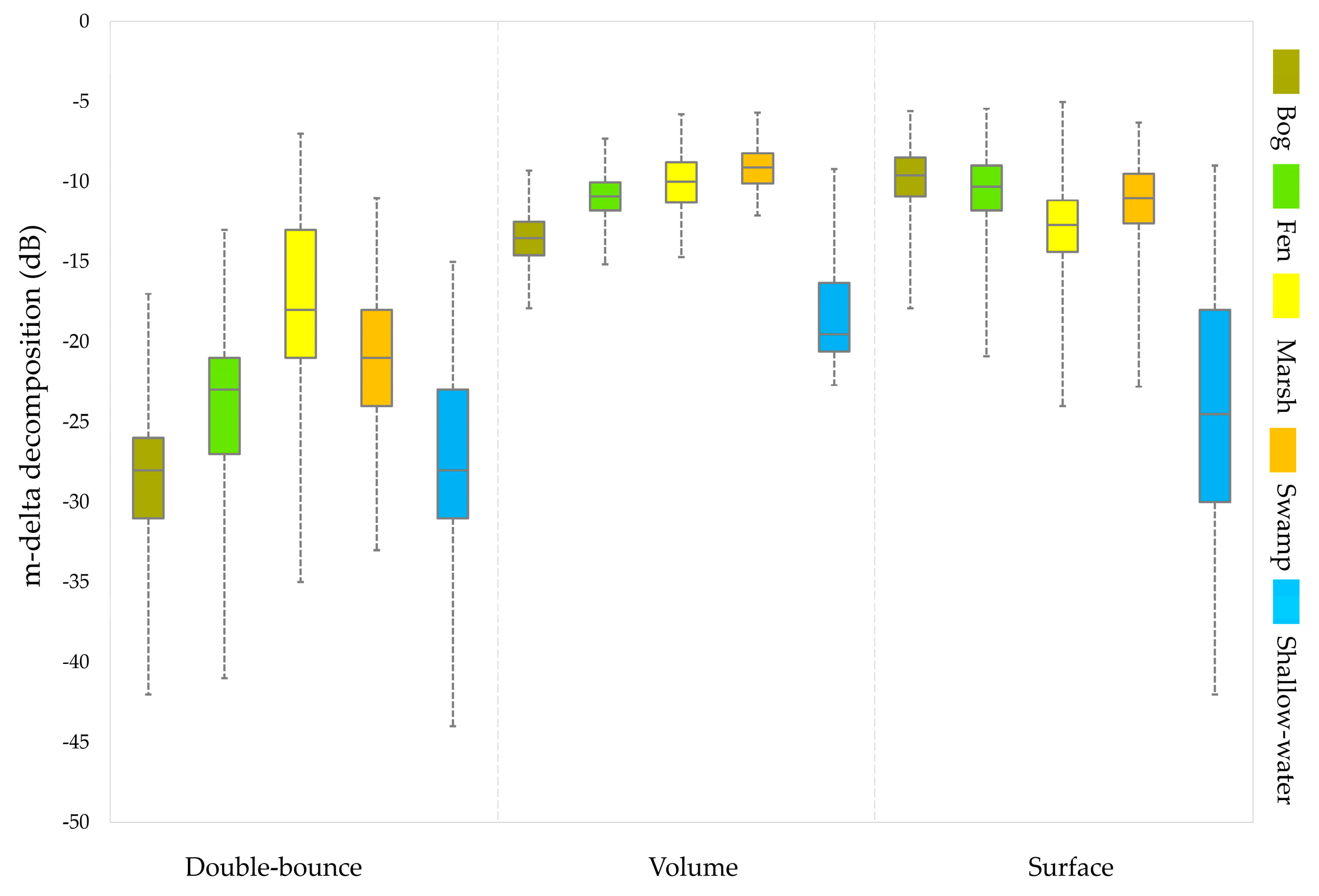
Notably, decomposition techniques allow the polarimetric covariance or coherency matrixes to be separated into three main scattering mechanisms: single/odd-bounce scattering, which represents direct scattering from the vegetation or ground surface (e.g., rough water); double/even-bounce scattering, which represents scattering between, for example, flooded vegetation within smooth open water; and volume scattering, which represents multiple scattering within developed vegetation canopies. As such, several studies reported the success of wetland classification using FP SAR data in different geographic regions, such as China [
30], Europe [
31], the United States [
32], and Canada [
33]. However, the main limitations associated with the FP SAR configuration are the time constraints caused by the alternative transmitting of H and V polarizations toward ground targets, the large satellite mass caused by higher system power requirements, and the small swath coverage caused by doubling pulse repetition frequency (PRF) [
34]. The small swath coverage precludes the potential of such data for applications on large-scales [
35], for example, for the production of daily ice charts and annual crop inventories.
Dual-polarimetric (DP) SAR data cover a larger swath width and, currently, are the main source of SAR observations for operational applications. Such a SAR data configuration is currently available on Sentinel-1 SAR mission satellite of the Copernicus program by the European Space Agency (ESA) [
36]. The main purpose of this mission is to provide full, free, and open access SAR observations for environmental monitoring [
37]. Furthermore, the 12-days satellite revisit time makes Sentinel-1 SAR data ideal for monitoring phenomena with highly dynamic natures such as wetlands [
18,
38], as well as assistant with operational applications such as sea ice monitoring [
39] and crop mapping [
40]. However, insufficient polarimetric information is available within such data. Furthermore, DP SAR data cannot maintain a relative phase between polarization channels, thus diminishing their capability to distinguish similar land and wetland classes through advanced polarimetric decomposition techniques [
29]. To move forward with both polarization diversity and swath coverage, the compact polarimetry (CP) SAR configuration was introduced. CP SAR sensors are in the same group as that of DP but differ in terms of the choice of polarization channels [
41]. This configuration collects greater polarimetric information compared to that of DP, while covering a much larger swath width relative to that of FP SAR data. CP SAR sensors also maintain the relative phase between two received polarization channels, which further makes them advantageous relative to DP SAR sensors for a variety of applications.
Importantly, the upcoming RADARSAT Constellation Mission (RCM), which is the successor mission to RADARSAT-2, that is planned to be launched in 2019, will have a circularly transmitting, linearly receiving (CTLR) CP mode as one of its main SAR data collection configurations [
42]. The main purposes of RCM are to ensure data continuity for RADARSAT-2 users and ameliorate the operational capability of SAR data by leveraging a more advanced spaceborne mission [
35]. In particular, RCM comprises three identical small (relative to RADARSAT-2) C-band satellites to gain greater satellite coverage over a much shorter satellite revisit time (only four-day) [
43]. This is of great importance for applications, such as maritime surveillance and ecosystem monitoring, which heavily rely on frequent SAR observations.
Various SAR configurations and polarizations are available with RCM. These include single-polarimetry (SP), conventional DP, and CTLR CP modes. In the CTLR mode, RCM transmits a right-circular polarized signal and receives two coherent orthogonal linear (both horizontal and vertical) polarized signals (RH and RV) and their relative phase [
44]. Lower PRF and system power and less on-board mass and data volume are other advantages of RCM compared to RADARSAT-2 [
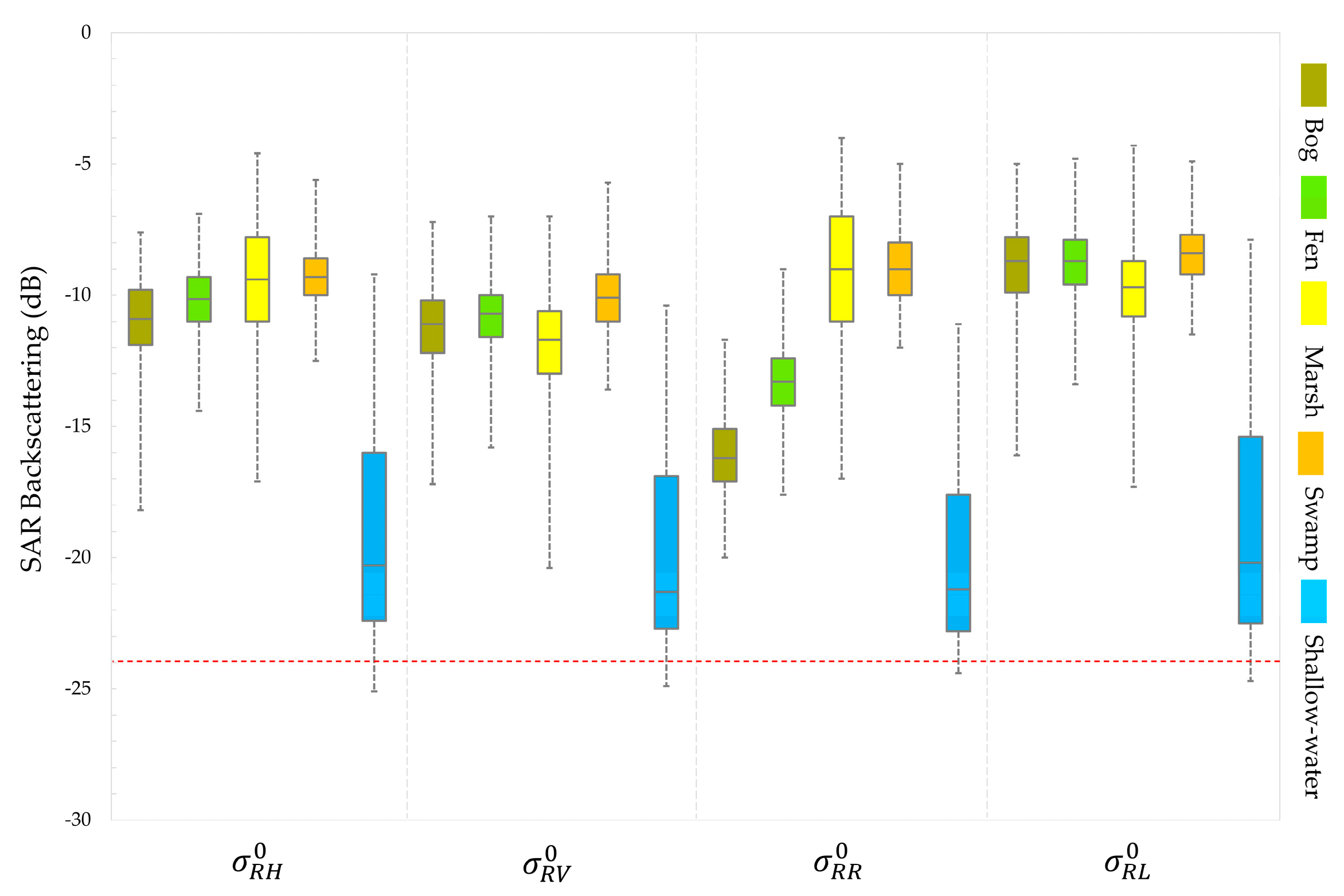
45]. Despite these benefits, less polarimetric information is available within CP SAR data compared to that of FP SAR data. Furthermore, Noise Equivalent Sigma Zero (NESZ) values potentially range between −25 to −17 dB for RCM data [
43], which are higher than those of RADARSAT-2 in most cases. This decreases the sensitivity of the RCM SAR signal to ground features with low backscattering values, such as open water and sea ice.
It is beneficial to compare both the similarities and differences of CP SAR data collected by RCM with those of RADARSAT-2 in different applications, prior to the availability of RCM data for operational monitoring. Given that maritime surveillance is one the main application of RCM data [
45], the potential of simulated or real CP SAR data has been well examined for sea ice classification and monitoring in several recent studies (e.g., [
35,
41,
46,
47]). However, the potential of CP SAR data for other applications, such as wetland characterization, remains an active research area, requiring much investigation to fully exploit the capability of such data for other purposes, such as ecosystem monitoring (e.g., agriculture, wetland, and forestry). Notably, two previous studies have highlighted the capability of simulated CP SAR data from RADARSAT-2 for wetland mapping. Brisco et al. (2013) first reported the potential of CP SAR data for wetland classification in southwestern Manitoba, Canada, using 12 CP SAR features but for wetland classes different from typical Canadian wetland classes (i.e., bog, fen, marsh, swamp, and shallow-water, as classified based on the Canadian Wetland Classification System, CWCS) [
48]. White et al. (2017) evaluated the potential of simulated CP SAR data from RADARSAT-2 with a larger number of CP features, yet only for peatland classes (i.e., poor fen, open shrub bog, and treed bog) in a small area in Southern Ontario, Canada [
49]. However, the latter study exploited the synergy of CP and FP SAR data with digital elevation model (DEM) and Landsat-8 optical data for classifying peatland classes [
49]. Although their methodology and results were sound, much investigation is still required to fully understand the compact polarimetric responses of various CP SAR features to standard wetland classes (according to the definition of CWCS).
The present research was built on the knowledge gained from our previous work, wherein the potential of CP SAR features for wetland mapping was investigated [
29]. However, unlike in [
29], in the present study, three wetland sites were selected and the main objectives here were to identify the most useful CP features for similar wetland class discrimination and to improve image interpretation using both qualitative and quantitative approaches. Specifically, this study aimed to: (1) explore the effect of the difference in polarization between FP (RADARSAT-2) and simulated CP SAR data for the classification of wetland complexes; (2) determine the separability between pairs of wetland classes with various CP SAR features both visually, using box-and-whisker plots, and quantitatively, using the Kolmogorov-Smirnov (K-S) distance measurement; and (3) classify wetland complexes using the most effective CP SAR features using an object-based random forest (RF) algorithm.
5. Conclusions
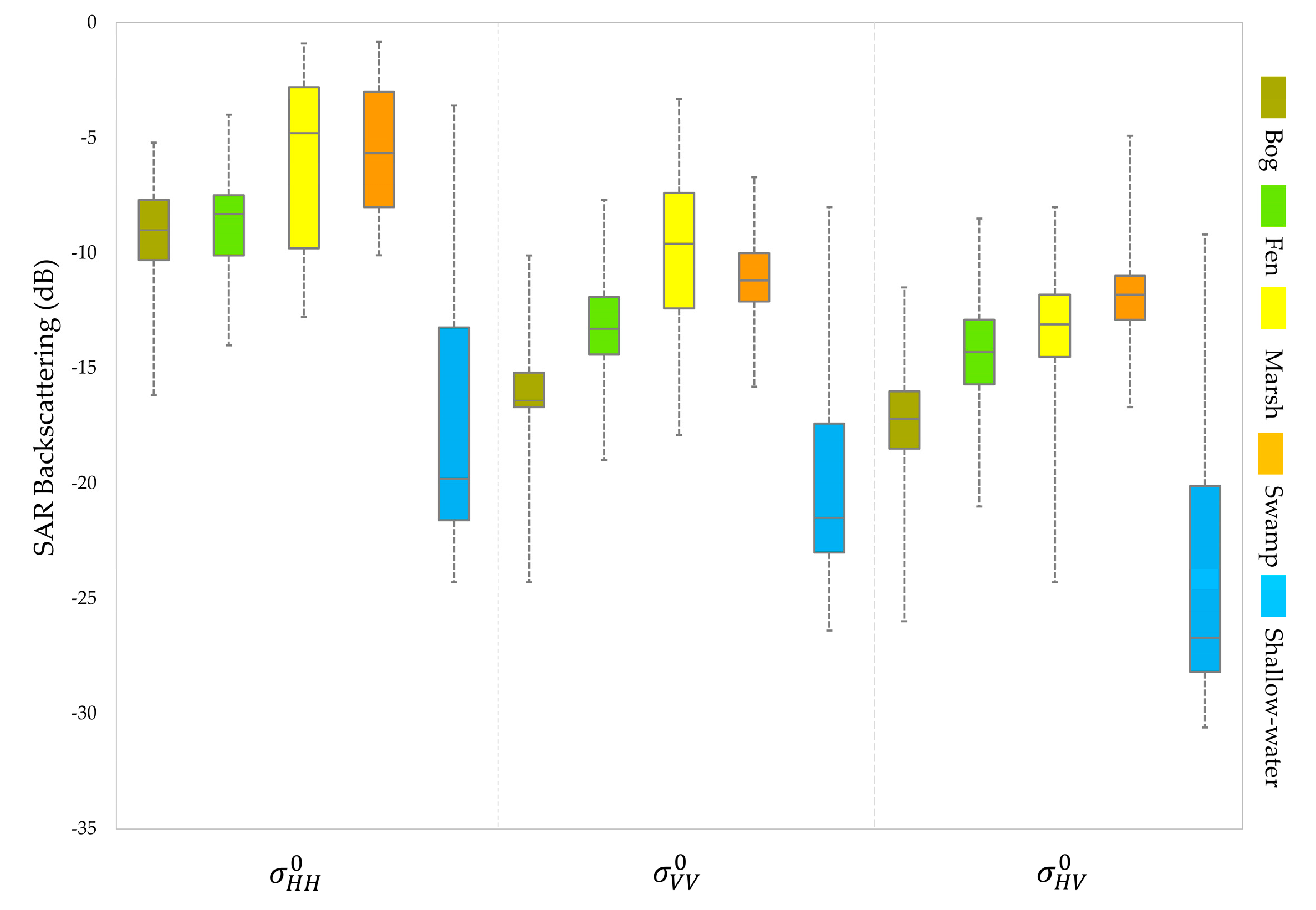
The spatial distribution of wetlands is of particular interest for the sustainable management of this important, productive ecosystem. In this study, the capability of full and simulated compact polarimetric (FP and CP) SAR data for wetland mapping was investigated in three pilot sites in Newfoundland and Labrador, Canada. A total of 13 FP and 22 simulated CP SAR features were extracted to identify the discrimination capability of these features between pairs of wetland classes both qualitatively, using backscattering analysis, and quantitatively, using the two-sample Kolmogorov-Smirnov (K-S) distance measurement. The most useful features were then identified and incorporated into the subsequent classification scheme.
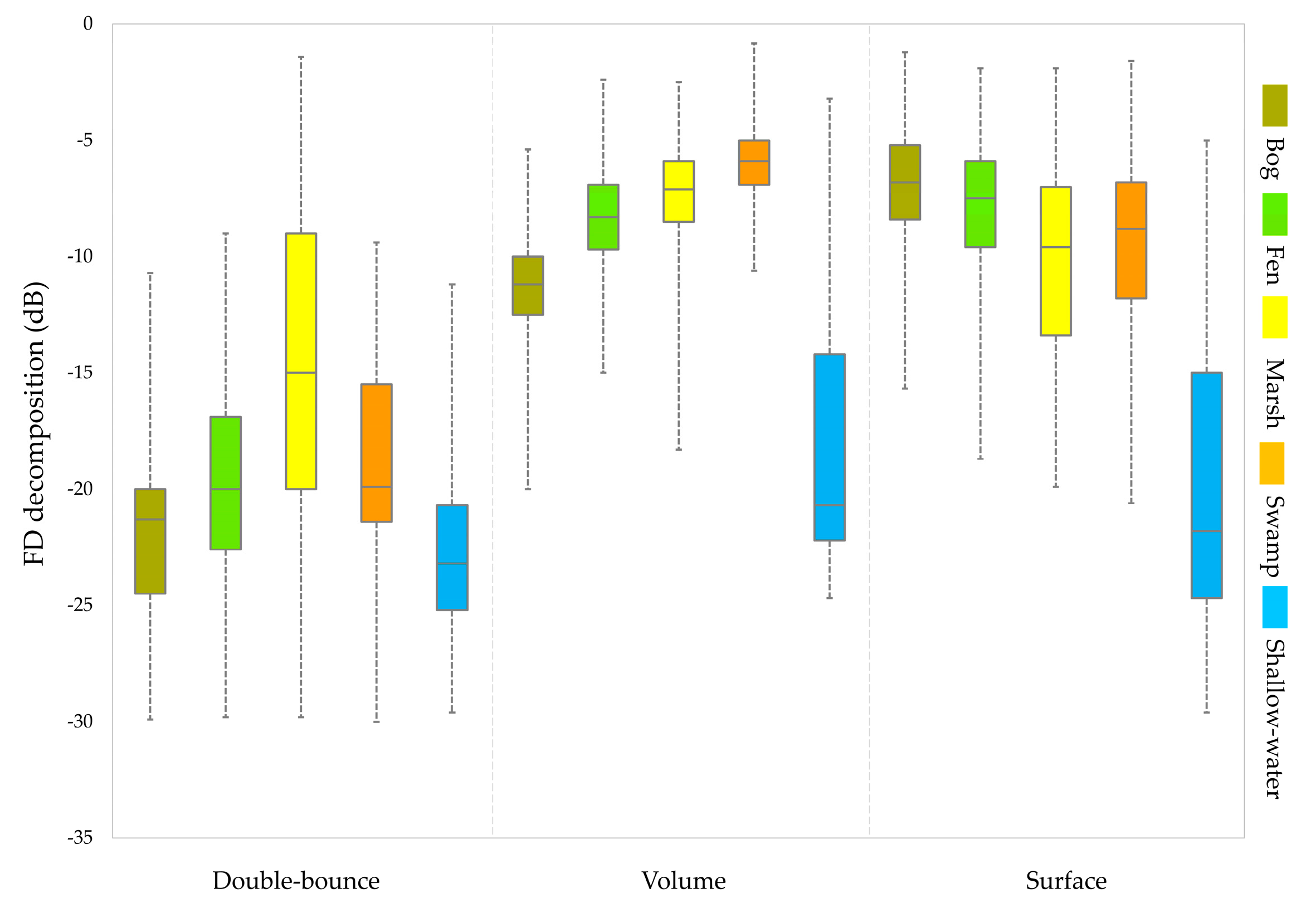
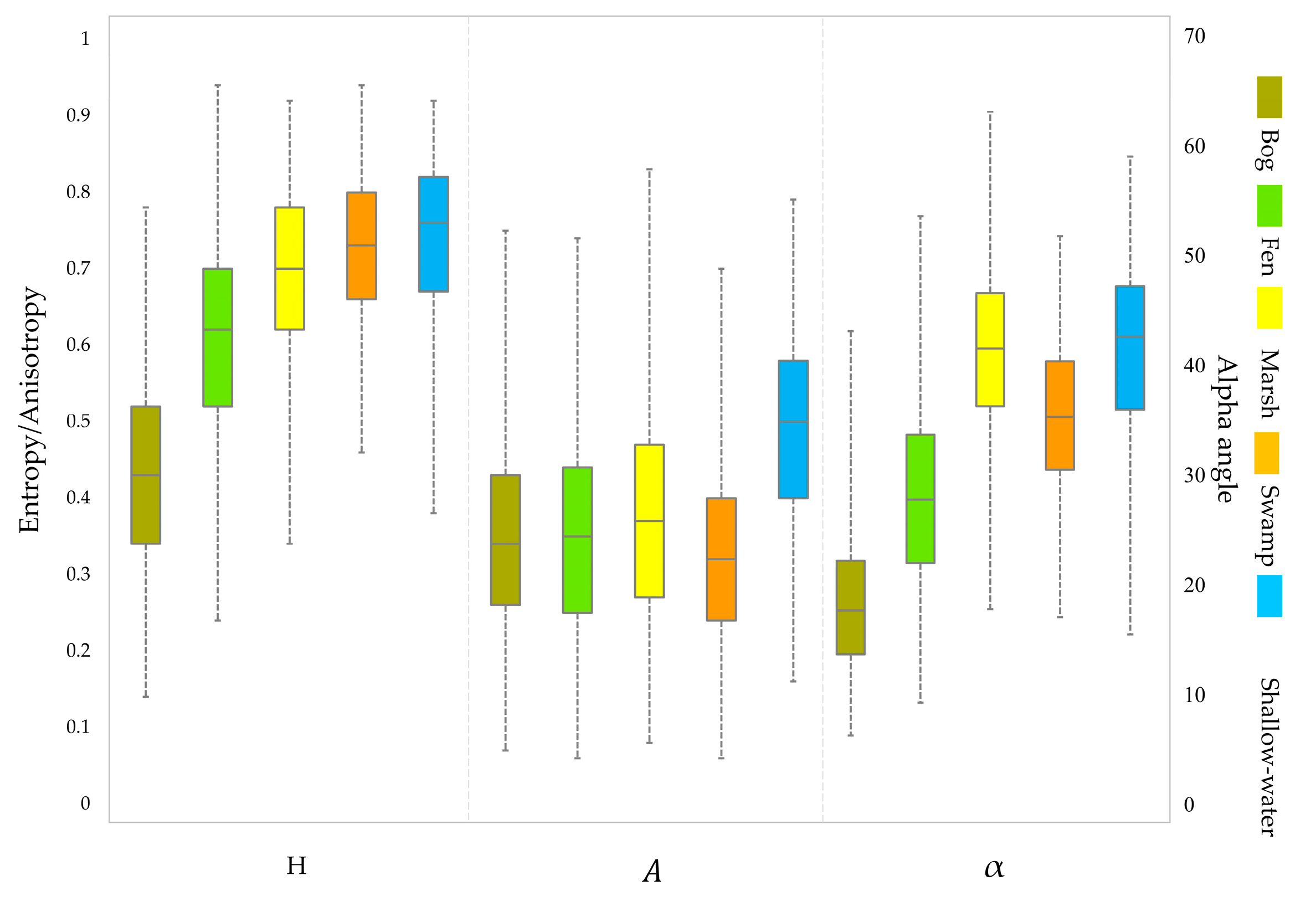
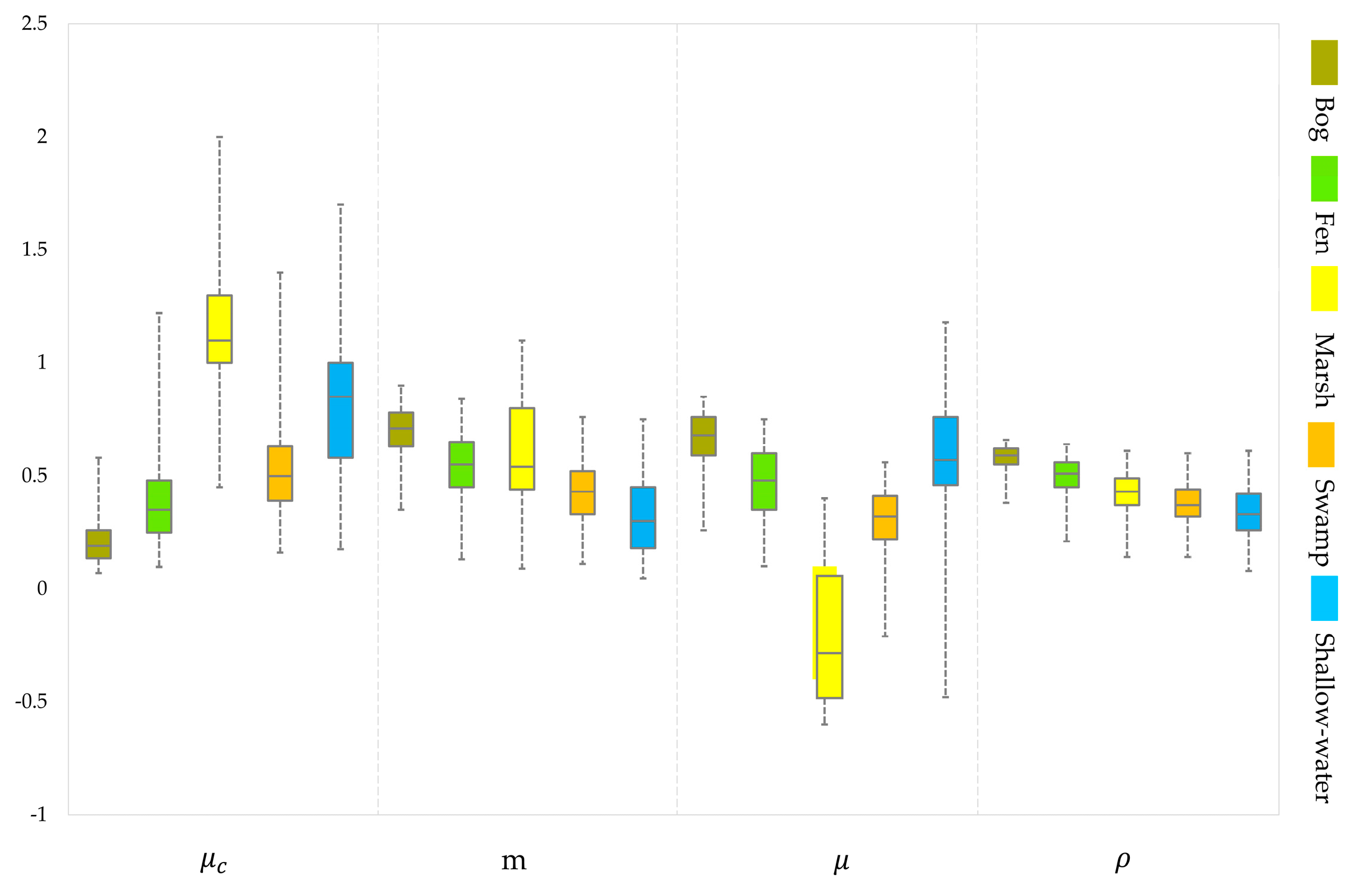
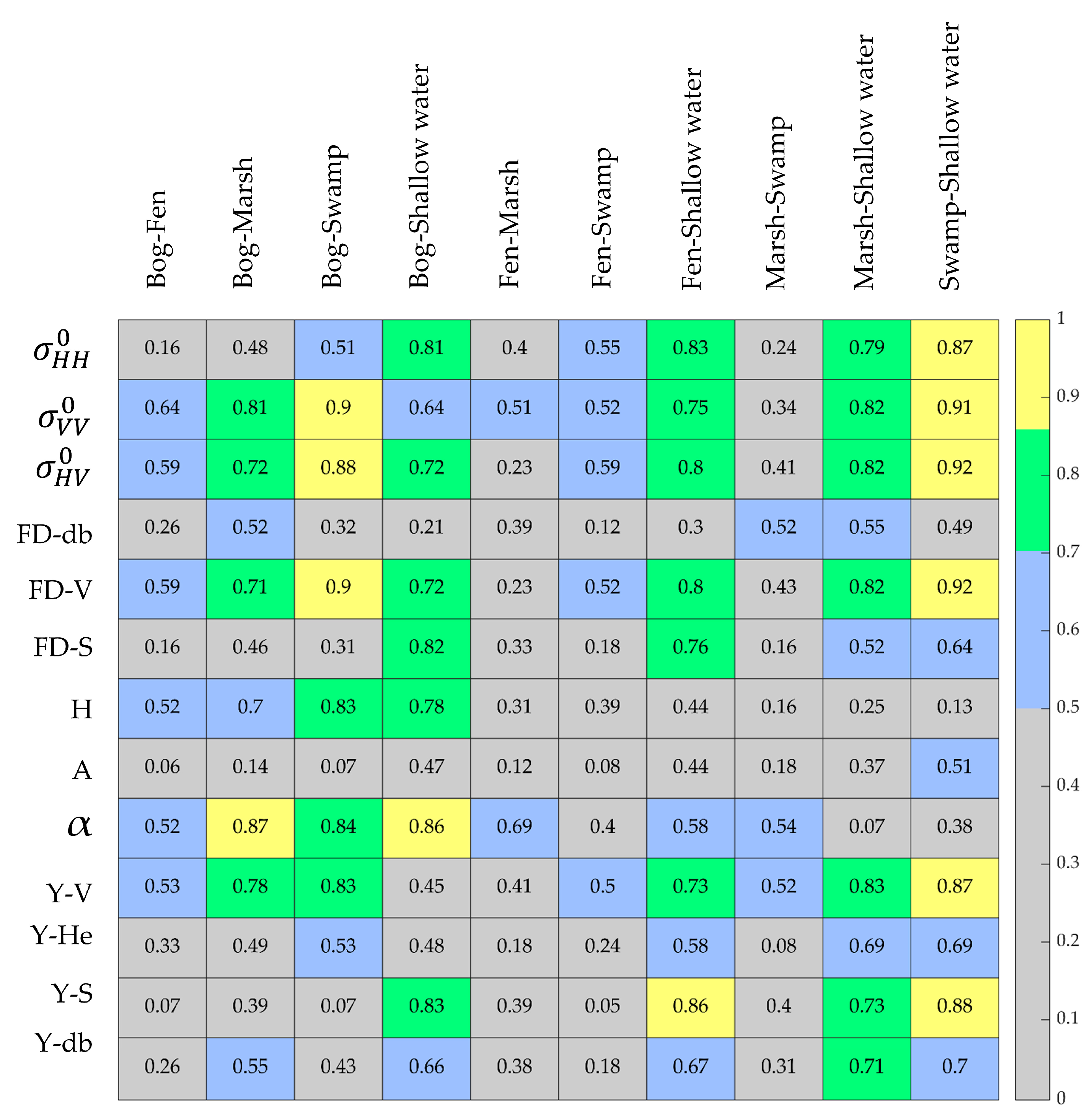
Among wetland classes, bog and shallow-water were found to be easily distinguished according to both the backscattering analysis and the K-S distance. Several features indicated either good or excellent separability between pairs of shallow-water-other classes and bog-other classes. Among FP features, backscattering intensity features, the Cloude-Pottier alpha angle, the volumetric components of the Freeman-Durden and Yamaguchi decompositions, as well as the surface scattering component of Yamaguchi decomposition were useful, as they indicated an excellent separability () between at least one pair of wetland classes. With regard to the CP SAR features, SAR backscattering coefficients, the first and last components of the Stokes vector, the circular polarization ratio, conformity coefficient, correlation coefficient, Shannon entropy, and both volume and surface scattering components of the m-chi and m-delta decompositions were useful features.
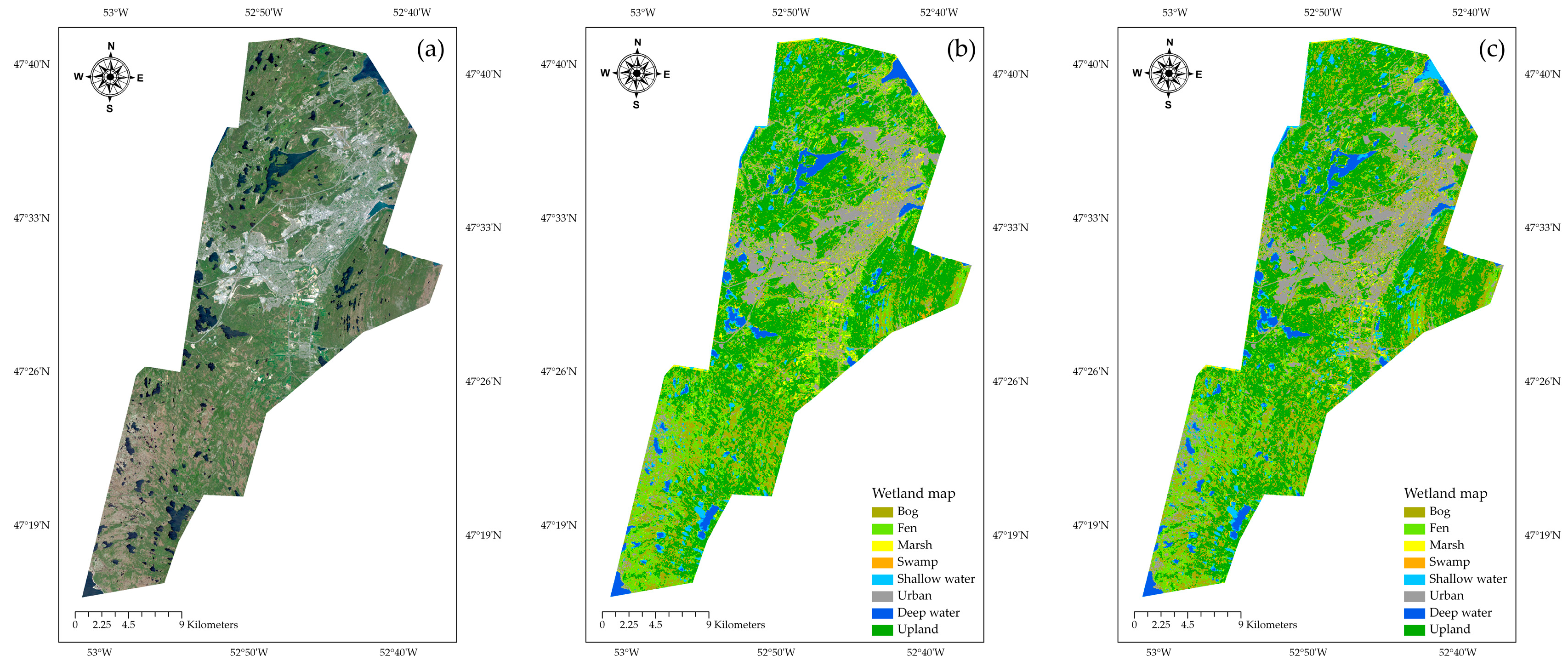
The overall accuracies of 87.89%, 80.67%, and 84.07% were obtained from the CP SAR data for the Avalon, Deer Lake, and Gros Morne study areas, respectively. The overall accuracies obtained from the FP SAR data were 90.73%, 84.75%, and 90.93% for the Avalon, Deer Lake, and Gros Morne study areas, respectively, which were higher than those of CP. Although the classification results demonstrated the superiority of FP SAR data compared to that of CP, the latter remains advantageous. This is because CP SAR data, which will be collected by RCM, will have a wider swath coverage and improved temporal resolution compared to those of RADARSAT-2. This is of great significance for efficiently mapping phenomena with highly dynamic natures (e.g., wetlands) on a large scale. Thus, the results of this research suggest that CP SAR data available on RCM hold great promise for discriminating conventional Canadian wetland classes. The analysis presented in this study contributes to further scientific research for wetland mapping and serves as a predecessor study for RCM, which will soon be the primary source of SAR observations in Canada.

 1,
1, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}