Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points


1
Département de Mathématiques, Université Mohamed El Bachir El Ibrahimi, Bordj Bou Arréridj 34265, El Anasser, Algeria
2
Departament de Matematiques, Universitat Autònoma de Barcelona, 08193 Bellaterra, Barcelona, Spain
*
Author to whom correspondence should be addressed.
Mathematics 2020, 8(5), 755; https://doi.org/10.3390/math8050755
Submission received: 20 April 2020
/
Revised: 6 May 2020
/
Accepted: 6 May 2020
/
Published: 10 May 2020
(This article belongs to the Special Issue Qualitative Theory for Ordinary Differential Equations)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:In this paper, we study the existence of limit cycles of planar piecewise linear Hamiltonian systems without equilibrium points. Firstly, we prove that if these systems are separated by a parabola, they can have at most two crossing limit cycles, and if they are separated by a hyperbola or an ellipse, they can have at most three crossing limit cycles. Additionally, we prove that these upper bounds are reached. Secondly, we show that there is an example of two crossing limit cycles when these systems have four zones separated by three straight lines.
MSC:
Primary 34A36; 34C25; 34A261. Introduction
The problem of the existence of limit cycles and mainly the problem of controlling their maximum number are two of the most difficult problems in the qualitative theory of differential systems in the plane. We solve these two problems for the class of discontinuous piecewise differential systems here considered.
We recall that a limit cycle is a periodic orbit of a differential system, which is isolated in the set of all periodic orbits of the system.
Limit cycles appear in a natural way in many applications. Thus, recently, the problem of the existence and the number of limit cycles has also been studied for discontinuous piecewise linear differential systems; this study goes back to Andronov et al. [1] and still has been given attention by researchers, mainly due to its simplicity and to its applications to a large number of phenomena, such as switches in electronic circuits, mechanical systems, etc.; see for instance [2,3,4], the books [5,6], and the hundreds of references quoted therein.
Lum and Chua [7] conjectured that a continuous planar piecewise linear system with two zones separated by a straight line can exhibit at most one limit cycle. Freire et al. [8] proved this conjecture in 1998. For the planar discontinuous piecewise linear systems, Han and Zhang [9] conjectured that these systems can have at most two crossing limit cycles when we separate them by a straight line, but Huan and Yang [10] gave a numerical example with three limit cycles; this result was proven analytically by Llibre and Ponce [11]. In 2015, Llibre et al. [12] proved that if we separate the planar discontinuous piecewise linear differential centers by a straight line, we cannot have any limit cycle. Recently, in the works [13,14,15,16], planar discontinuous linear differential centers separated by an algebraic curve, such as a conic, or a reducible and irreducible cubic, were studied, and it was proven that these differential systems can exhibit at most three crossing limit cycles having two intersection points with the conic of separation; the same result was proven if the curve of separation was a cubic.
In the literature, we find many papers studying piecewise smooth vector fields with two zones, and few papers for three and four zones.
In this paper, we consider planar piecewise linear Hamiltonian systems without equilibrium points.
Our first objective is to provide the exact maximum number of crossing limit cycles of planar discontinuous piecewise linear Hamiltonian systems without equilibrium points (PHS) and separated by a conic . We follow the Filippov rules for defining the flow of the piecewise differential systems on a line of discontinuity; see [17].
We know that any conic takes nine canonical forms, but the four following forms: , , and do not separate the plane in connected regions, then we omit them. We do not study the crossing limit cycles separated by the conic , because in [18], it was proven that PHS with three zones separated by two parallel straight lines have at most one crossing limit cycle.
The second objective of this paper is to study the crossing limit cycles of piecewise smooth differential systems such that in each piece, the differential system is linear, Hamiltonian, and without equilibrium points. Then, easy computations show that such differential system in each piece must have a vector field of the form:
and , with . Their corresponding Hamiltonian function is:
For more details, see [18].
1.1. Crossing Limit Cycles for Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points Separated by a Conic
In this subsection, we give the upper bound of crossing limit cycles of PHS separated by a parabola, P: , by a hyperbola H: , or by an ellipse E: .
We consider only the crossing limit cycles that intersect the conics in exactly two points, and for this reason, we will not study the crossing limit cycles separated by two intersecting straight lines .
Our first main result is the following.
Theorem 1.
The following statements hold.
- (a)
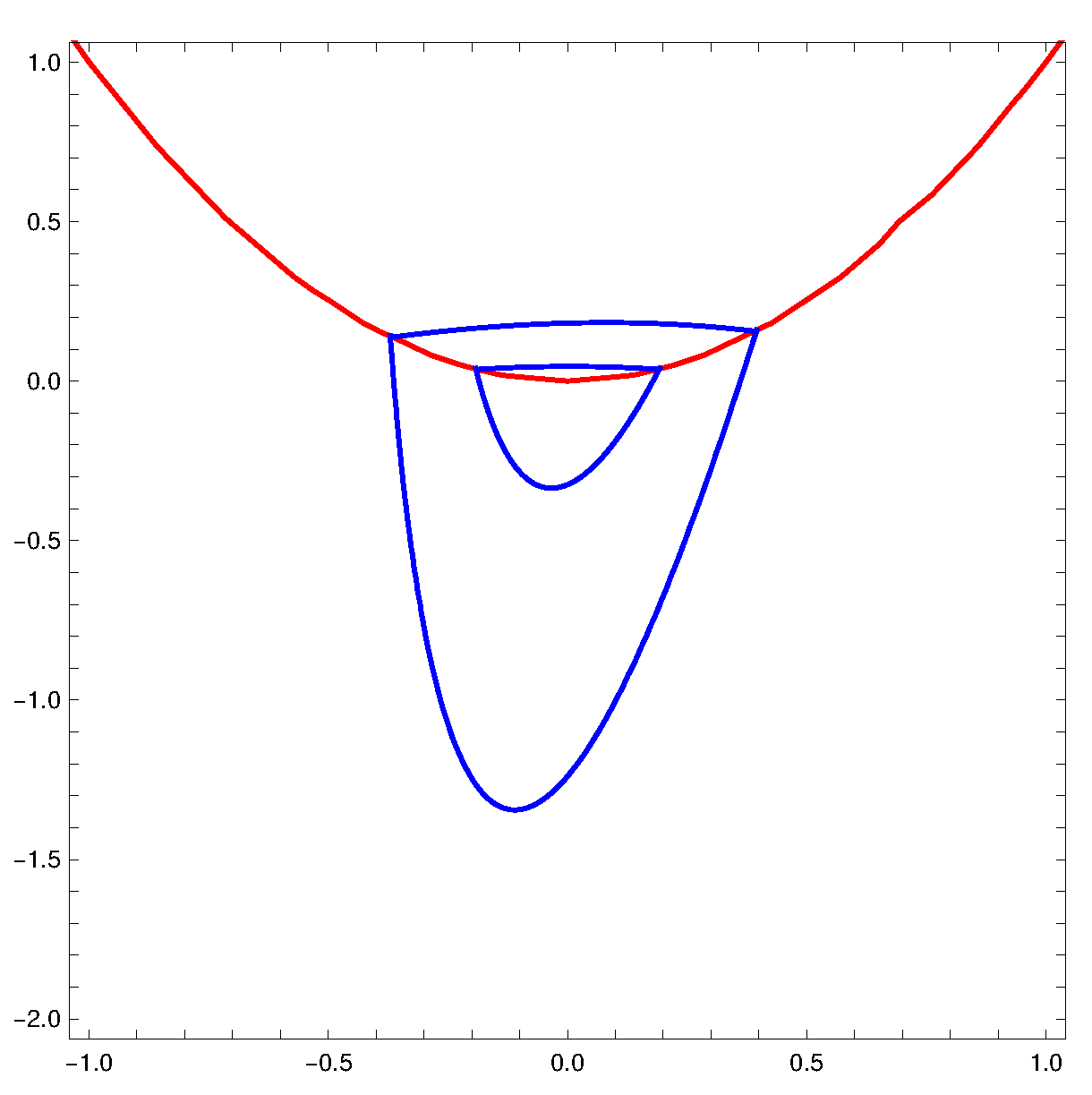
- The maximum number of crossing limit cycles of PHS intersecting the parabolaPat two points is at most two, and this maximum is reached; see Figure 1.
- (b)
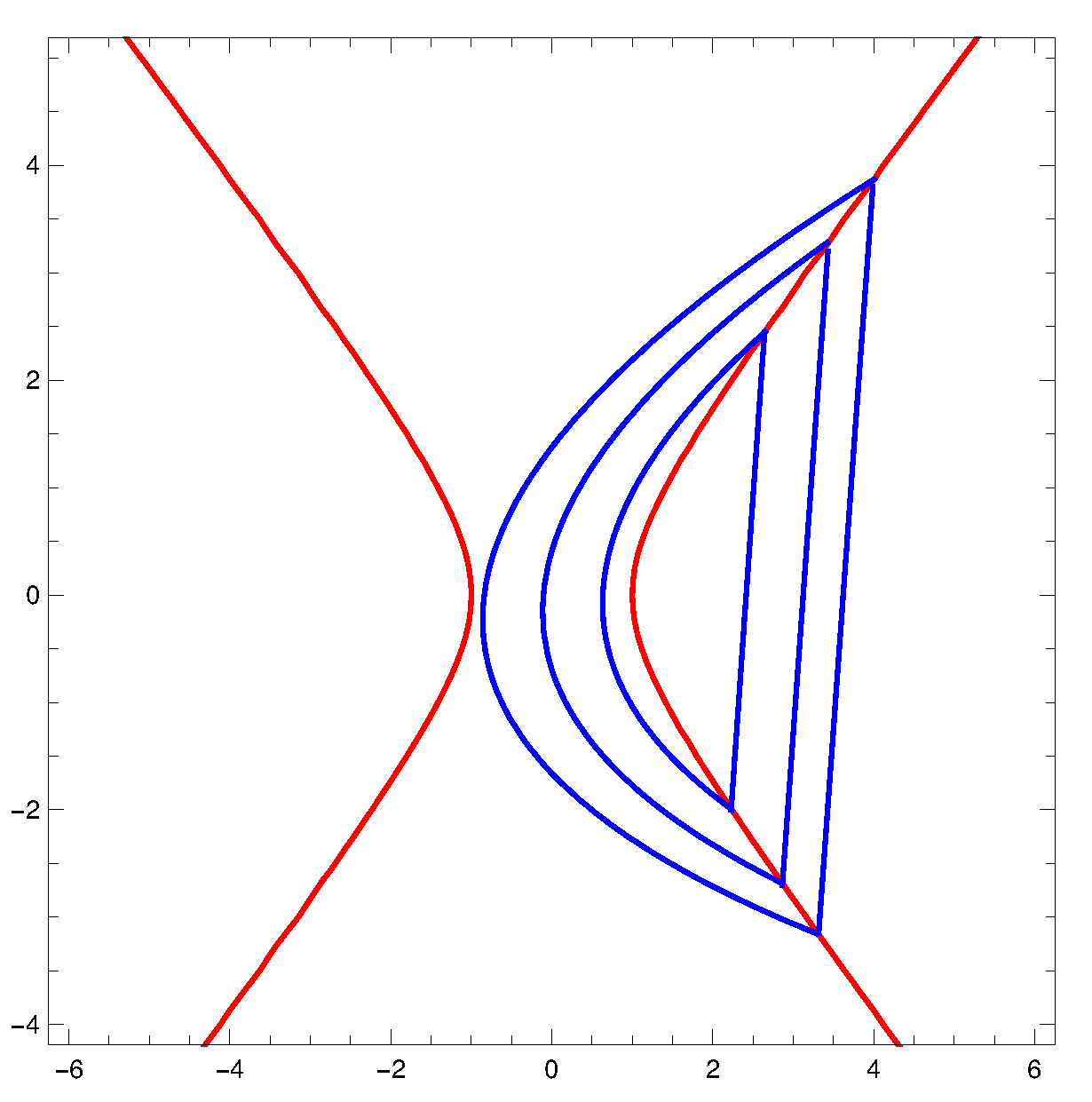
- The maximum number of crossing limit cycles of PHS intersecting the hyperbolaHat two points is at most three, and this maximum is reached; see Figure 2.
- (c)
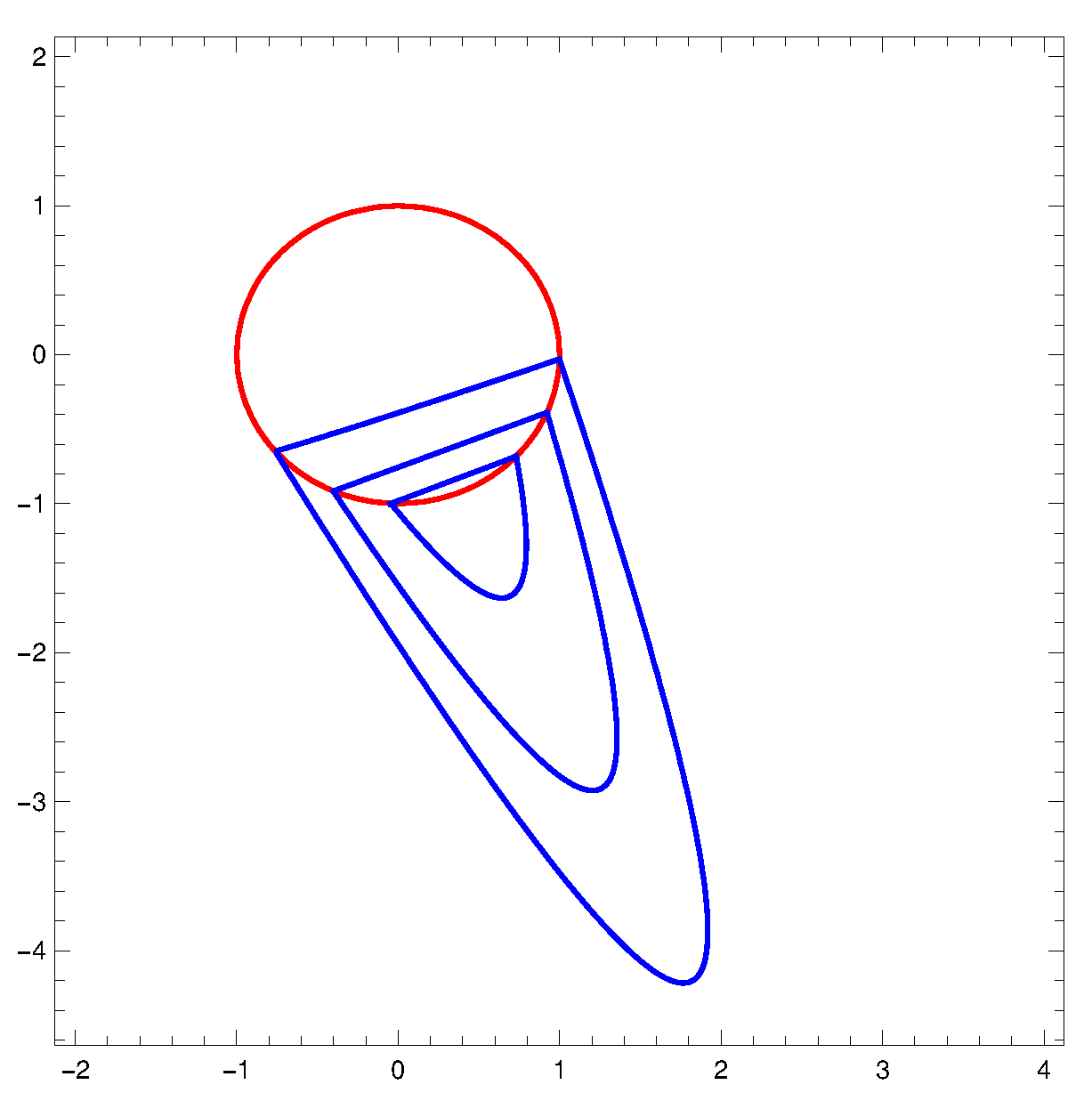
- The maximum number of crossing limit cycles of PHS intersecting the ellipseEat two points is at most three, and this maximum is reached; see Figure 3.
The proof of Theorem 1 is given in Section 2.
1.2. Crossing Limit Cycles for Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points with Four Zones
In this subsection, we study the existence of crossing limit cycles of the planar piecewise linear Hamiltonian systems without equilibrium points with four zones:
satisfying the condition:
C. The vector fields , , , and are linear and Hamiltonian without equilibrium points.
Our second results are the following.
Theorem 2.
Continuous planar piecewise Hamiltonian systems without equilibrium points with four zones satisfyingChave no crossing limit cycles.
Theorem 3.
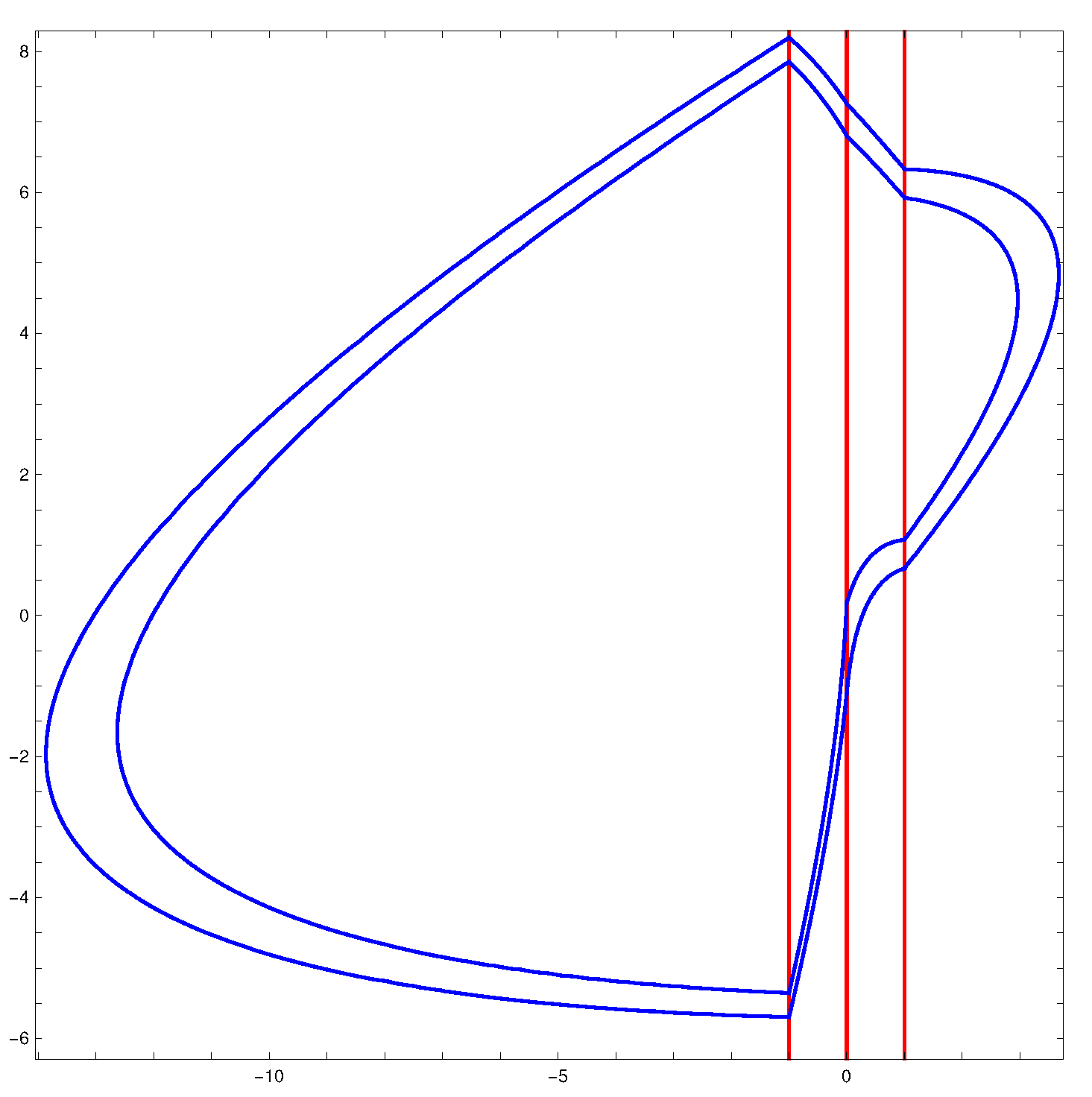
There are discontinuous planar piecewise Hamiltonian systems without equilibrium points with four zones satisfyingC, exhibiting exactly two crossing limit cycles; see Figure 4.
The proofs of Theorems 2 and 3 are given in Section 3.
2. Proof of Theorem 1
Proof of Statement (a) of Theorem 1.
In the region , we consider the planar discontinuous piecewise linear Hamiltonian systems without equilibrium points:
with and . The corresponding Hamiltonian function is:
In the region , we consider:
with and . The corresponding Hamiltonian function is:
In order to have a crossing limit cycle that intersects the parabola at the points and , these points must satisfy the following system:
We suppose that the two systems (2) and (4) have three crossing limit cycles. Then, System (6) must have three pairs of points as solutions, namely and , with . Due to the fact that these points satisfy System (6) and if we consider the points and , solving the first two equations of (6) with respect to the parameters and , we get:
and has the same expression that changes by .
If the second points and satisfy System (6), then solving the first two equations of (6) with respect to the parameters and , we get:
and has the same expression that changes by .
Finally, we suppose that the points and satisfy System (6), then the parameters and must be where:
has the same expression that changes by .
We replace , , and in the expression of and , , and in the expression of , and we obtain . Therefore, the piecewise linear differential system becomes a linear differential system, which does not have limit cycles. Therefore, the maximum number of crossing limit cycles in this case is two.
Example with two limit cycles. Consider the planar discontinuous piecewise linear Hamiltonian system without equilibrium points separated by the parabola P:
in the region , its corresponding Hamiltonian function is:
Proof of Statement (b) of Theorem 1.
In the region , we consider the PHS given in (2). Its corresponding Hamiltonian function is given by Equation (3).
In the region , we consider the PHS given in (2). Its corresponding Hamiltonian function is given by Equation (5).
In order to have a crossing limit cycle that intersects the hyperbola at the points and , these points must satisfy the system:
We assume that the two systems (2) and (4) have four crossing limit cycles. Therefore, System (7) must have four pairs of points and for as solutions. Since these points satisfy System (7), we consider the points and , and from (7), we obtain that the parameters and must be:
If we change by in the expression of , we get the expression of .
We suppose that the second points and satisfy System (7), then the parameters and must be:
If we change by in the expression of , we obtain .
Now, we suppose that points and satisfy System (7), then we obtain two values of (we name them and ) and two values of (we name them and ). The first value of is given by and , where:
and the expression of C is:
We get the expression of and by changing by in the expression of and , respectively.
We replace , , and in the expression of and , , and in the expression of , and we obtain , for . Hence, in these cases, the piecewise linear differential system becomes a linear differential system, which does not have limit cycles. Therefore, the maximum number of crossing limit cycles in this case is two.
Now, we consider either and or and , by replacing the expressions of , , and (resp. ) in the expression of and , , and (resp. ) in the expression of ; we have .
Then, we assume that points and satisfy System (7), then we obtain and . This is a contradiction because by the assumptions, they are not zero. Then, we proved that the maximum number of crossing limit cycles for PHS separated by a hyperbola is at most three.
Example with three limit cycles. We consider a PHS separated by the hyperbola H:
in the region . It has the Hamiltonian function:
Now, we consider the second PHS:
in the region . This differential system has the Hamiltonian function:
Proof of Statement (c) of Theorem 1.
In order that Systems (2) and (4) have crossing limit cycles intersecting the ellipse at the points and , they must satisfy the system:
We suppose that Systems (2) and (4) have four crossing limit cycles. Therefore, System (11) must have four pairs of points and for as solutions. Therefore, if we consider the points and , from (11), we obtain that the parameters and must be:
If we change by in the expression of , we get the expression of .
Now, if the second points and satisfy System (11), then the parameters and take the values:
If we change by in the expression of , we obtain .
If we assume that the points and satisfy System (11), then we obtain two values of , namely and , and two values of , namely and , such that and , where:
and the expression of C is:
The expressions of and are the same as the expressions of and , respectively, if we change by .
We replace , , and in the expression of and , and in the expression of , and we obtain for . Therefore, the maximum number of crossing limit cycles in these cases is two.
Now, we consider either and or and , by replacing the expressions of , , and (resp. ) in the expression of and , and (resp. ) in the expression of , and we get two different expressions of the Hamiltonian functions and .
Then, we assume that points and satisfy System (11), and by solving this system, we obtain and , which is a contradiction. Then, we proved that the maximum number of crossing limit cycles for PHS separated by an ellipse is at most three.
Example with three limit cycles. In the region , we consider the linear PHS:
its Hamiltonian function is:
In the region , we consider the linear PHS:
Its Hamiltonian function is:
We mention that the proof of Theorem 1 can be also analyzed using the results of [19].
3. Proof of Theorems 2 and 3
Proof of Theorem 2.
Consider a continuous linear Hamiltonian differential system separated by the straight lines , , and . According to the continuity of the vector field X, we obtain:
which imply that:
Therefore, from System (1), the piecewise vector field becomes the vector field:
Since this linear differential system has no equilibrium point, it has no periodic orbits, then no limit cycles. This completes the proof of Theorem 2. □
Proof of Theorem 3.
If the PHS with four zones have crossing limit cycles, then there are crossing points , , , , and , satisfying:
or equivalently:
As and , we can solve Equation (16) for , as well as we can solve Equation (21) for . Substituting the obtained values of and into Equations (18) and (20), respectively, we obtain the following two equations:
and:
Substituting (24) into (22), we obtain two equations depending on and . Then, substituting (25) into (23), we obtain two equations depending on and .
Therefore, we compute the product and , and we obtain two quartic polynomial equations with the variables and .
By using Bézout’s theorem, we obtain that the number of solutions of the system:
is bounded by the product of the degrees of the polynomials and . If is a solution of these equations, is also a solution. Therefore, we obtain that the number of different solutions of System (26) is at most eight, which is an upper bound for the maximum number of limit cycles that can have the PHS (15). Due to the higher degree of this system and the number of its parameters, we only can give an example with two limit cycles.
Example with two limit cycles. Consider the vector fields such that:
Their corresponding Hamiltonian functions are given, respectively, by:
The first crossing limit cycle intersects the straight lines of discontinuity in the following points: and ; and ; and and . The second crossing limit cycle intersects the straight lines of discontinuity in the points: and ; and ; and and . The crossing limit cycles of X are shown in Figure 4. □
4. Conclusions
We considered four classes of discontinuous piecewise differential systems formed by linear Hamiltonian systems without equilibrium points in the plane separated either by a parabola, a hyperbola, an ellipse, or three parallel lines. For each class, we provided the maximum number of crossing limit cycles that the differential systems of the class can exhibit. Furthermore, we provided examples exhibiting the maximum number of limit cycles for each class.
We characterized the maximum number of crossing limit cycles for classes of discontinuous piecewise differential systems formed by linear Hamiltonian systems without equilibrium points separated by conics, but it remains to study these maximum numbers when the separation is done by cubics, or more general algebraic curves.
Author Contributions
Conceptualization, R.B. and J.L.; methodology, J.L.; software, R.B.; validation, R.B. and J.L.; formal analysis, R.B. and J.L.; investigation, R.B. and J.L.; writing–original draft, R.B. and J.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the Ministerio de Ciencia, Innovación y Universidades, Agencia Estatal de Investigación Grant MTM2016-77278-P (FEDER), the Agència de Gestió d’Ajuts Universitaris i de Recerca Grant 2017SGR1617, and the H2020 European Research Council Grant MSCA-RISE-2017-777911.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Andronov, A.; Vitt, A.; Khaikin, S. Theory of Oscillations; Pergamon Press: Oxford, UK, 1966. [Google Scholar]
- Banerjee, S.; Verghese, G. Nonlinear Phenomena in Power Electronics; Attractors, bifurcations chaos and nonlinear control; Wiley-IEEE Press: New York, NY, USA, 2001. [Google Scholar]
- Leine, R.I.; Nijmeijer, H. Dynamics and Bifurcations of Non-Smooth Mechanical Systems; Lecture Notes in Applied and Computational Mechanics, 18; Springer: Berlin, Germany, 2004. [Google Scholar]
- Liberzon, D. Switching in Systems and Control: Foundations and Applications; Birkhäuser: Boston, MA, USA, 2003. [Google Scholar]
- Di Bernardo, M.; Budd, C.J.; Champneys, A.R.; Kowalczyk, P. Piecewise-Smooth Dynamical Systems: Theory and Applications; Appl. Math. Sci. Series 163; Springer: London, UK, 2008. [Google Scholar]
- Simpson, D.J.W. Bifurcations in Piecewise–Smooth Continuous Systems; World Scientific Series on Nonlinear Science A; World Scientific: Singapore, 2010; Volume 69. [Google Scholar]
- Lum, R.; Chua, L.O. Global propierties of continuous piecewise-linear vector fields. Part I: Simplest case in . Int. J. Circuit Theory Appl. 1991, 19, 251–307. [Google Scholar]
- Freire, E.; Ponce, E.; Rodrigo, F.; Torres, F. Bifurcation sets of continuous piecewise linear systems with two zones. Int. J. Bifurc. Chaos 1998, 8, 2073–2097. [Google Scholar] [CrossRef]
- Han, M.; Zhang, W. On Hopf bifurcation in non-smooth planar systems. J. Differ. Equ. 2010, 248, 2399–2416. [Google Scholar] [CrossRef] [Green Version]
- Huan, S.M.; Yang, X.S. On the number of limit cycles in general planar piecewise linear systems. Disc. Cont. Dyn. Syst. 2012, 32, 2147–2164. [Google Scholar] [CrossRef]
- Llibre, J.; Ponce, E. Three nested limit cycles in discontinuous piecewise linear differential systems with two zones. Dyn. Cont. Disc. Impul. Syst. Ser. B 2012, 19, 325–335. [Google Scholar]
- Llibre, J.; Novaes, D.D.; Teixeira, M.A. Maximum number of limit cycles for certain piecewise linear dynamical systems. Nonlinear Dyn. 2015, 82, 1159–1175. [Google Scholar] [CrossRef] [Green Version]
- Benterki, R.; Llibre, J. The limit cycles of discontinuous piecewise linear differential systems formed by centers and separated by irreducible cubic curves I. 2019. submitted. [Google Scholar]
- Chen, H.; Li, D.; Xie, J.; Yue, Y. Limit cycles in planar continuous piecewise linear systems. Commun. Nonlinear Sci. Numer. Simul. 2017, 47, 438–454. [Google Scholar] [CrossRef]
- Jimenez, J.J.; Llibre, J.; Medrado, J.C. Crossing limit cycles for a class of piecewise linear differential centers separated by a conic. Elect. J. Differ. Equ. 2020, accepted. [Google Scholar]
- Llibre, J.; Zhang, X. Limit cycles for discontinuous planar piecewise linear differential systems separated by an algebraic curve. Int. J. Bifurc. Chaos 2019, 29, 1950017. [Google Scholar] [CrossRef] [Green Version]
- Filippov, A.F. Differential Equations With Discontinuous Righthand Sides; Kluwer Academic Publishers Group: Dordrecht, The Netherlands, 1998. [Google Scholar]
- Fonseca, A.F.; Llibre, J.; Mello, L.F. Limit cycles in planar piecewise linear Hamiltonian systems with three zones without equilibrium points. Int. J. Bifurc. Chaos 2019, accepted. [Google Scholar]
- Shang, Y. Lie algebraic discussion for affinity based information diffusion in social networks. Open Phys. 2017, 15, 705–711. [Google Scholar] [CrossRef]
Figure 1.
Two crossing limit cycles of planar discontinuous piecewise linear Hamiltonian systems (PHS) intersecting the parabola at two points.
Figure 1.
Two crossing limit cycles of planar discontinuous piecewise linear Hamiltonian systems (PHS) intersecting the parabola at two points.

Figure 2.
Three crossing limit cycles of PHS intersecting the hyperbola at two points.

Figure 3.
Three crossing limit cycles of PHS intersecting the ellipse at two points.

Figure 4.
Two crossing limit cycles of PHS with four zones.

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Benterki, R.; LLibre, J. Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points. Mathematics 2020, 8, 755. https://doi.org/10.3390/math8050755
AMA Style
Benterki R, LLibre J. Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points. Mathematics. 2020; 8(5):755. https://doi.org/10.3390/math8050755
Chicago/Turabian StyleBenterki, Rebiha, and Jaume LLibre. 2020. "Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points" Mathematics 8, no. 5: 755. https://doi.org/10.3390/math8050755
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.