1. Introduction
Let
be a given metric space and let
be two poins in
X with
. By a geodesic path from
x to
y we mean an isometry
with the property that
The image of each geodesic path between two given points is said to be a geodesic segment. We call
a geodesic space if every two points of
X can be joined by a geodesic segment. By definition, a geodesic triangle
consists of three points
together with the three segments that join each pair of these points. A comparison triangle of a geodesic triangle
, which will be denoted by
or
is a triangle in the plane
such that
and
This is a consequence of the triangle inequality; and it is well-known that it is unique up to isometry. In [
1] Bridson and Haefliger have proved that such a triangle always exists. A geodesic segment joining two points
in a geodesic space
X is denoted by
Every point
z in the segment is represented by
where
that is,
A subset
of a metric space
X is called convex if for all
A geodesic space is called a CAT(0) space if for every geodesic triangle ▵ and its comparison
the following inequality holds true:
for all
and
A complete CAT(0) space is often called a Hadamard space (see [
2,
3]). We mention in passsing that an
-tree, a Hadamard manifold, and the Hilbert ball endowed with the hyperbolic metric are typical examples of CAT(0) spaces. For more information on CAT(0) spaces, the interested reader is referred to [
4,
5,
6]. A geodesic space
is called hyperbolic (see for instance [
7,
8]) if, for any
Note that every normed space, and every CAT(0) space is a hyperbolic space. Bashir Ali in [
9] constructed an example of a hyperbolic space that is not a normed space. Therefore the class of hyperbolic spaces properly includes the class of normed spaces.
Definition 1. Let be a bounded sequence in a CAT(0) space - (1)
The asymptotic radius of is given by:where - (2)
The asymptotic center of is the set:
In 2006, Dhompongsa et al. [
10] observed that for a bounded sequence
in a CAT(0) space,
is a singleton.
Definition 2. Let be a nonempty, closed convex subset of a CAT(0) space . A mapping is said to be uniformly L-Lipschitzian if there exists a constant such that: It is now time to recall the concept of ▵-convergence in a given CAT(0) space.
Definition 3. Let be a CAT(0) space. A sequence in X is said to ▵-converge to if and only if x is the unique asymptotic center of all subsequences of . In this case, we write and call x the .
In the following, we recall some basic facts regarding the nonlinear mappings on CAT(0) spaces.
Let
be a nonempty subset of a CAT(0) spaces
. A self-mapping
is called nonexpansive if
for all
and is called quasi-nonexpansive if
and
for all
and
The class of quasi-nonexpansive mappings properly contains the class of nonexpansive mappings with fixed points; see, for example, [
11]. A mapping
T is called asymptotically nonexpansive [
12] if there exists a sequence
such that
as
and, for every
If
and there exists a sequence
such that
as
and, for every
then
T is called an asymptotically quasi-nonexpansive mapping. A mapping
T is called totally asymptotically nonexpansive if there exist null sequences
and
of nonnegative numbers (i.e.,
as
) and a strictly increasing function
with
such that:
A mapping
T is called totally asymptotically quasi-nonexpansive if
and there exist null sequences
and
of nonnegative numbers (i.e.,
as
) and a strictly increasing function
with
such that:
We recall that the concept of asymptotically nonexpansive mappings was first introduced by Goebel and Kirk [
12]. Then Alber et al. [
13] introduced the class of totally asymptotically nonexpansive mappings that generalizes several classes of maps that are extensions of asymptotically nonexpansive mappings. These classes of maps were extensively studied by several authors (see, e.g., [
14,
15,
16,
17,
18,
19], to list just a few). We remark that according to the Example 1 of [
20], the class of totally asymptotically nonexpansive mappings properly contains the class of asymptotically nonexpansive mappings.
We now turn to recall some well-known iteration processes. The Mann iteration process is defined by the sequence
where
is a sequence in
Further, the Ishikawa iteration process is defined as the sequence
where
and
are some numerical sequences in
In 2016, Huang in [
21], introduced the following algorithm for a family of nonexpansive mappings in a CAT(0) space:
where
is a sequence in
and
f is a
ϕ-weak contraction on
Further, in 2016, Balwant Singh Thakur, Dipti Thakur and Mihai Postolache in [
22], introduced the following algorithm for nonexpansive mappings in uniformly convex Banach spaces:
where
and
are real sequences in
In this paper, inspired by the Algorithms and , we introduce a new iterative algorithm for approximating fixed points of totally asymptotically quasi-nonexpansive mappings in CAT(0) spaces. We prove some strong convergence theorems under suitable conditions. The results we obtain improve and extend several recent results stated by many others; they also complement many known results in the literature. We then provide two numerical examples to illustrate our main result and to display the efficiency of the proposed algorithm.
3. Approximation Result
We begin this section by proving a strong convergence theorem for a totally asymptotically quasi-nonexpansive mapping.
Theorem 6. Let be a complete CAT(0) space, be a nonempty, closed convex subset of and be a uniformly L-Lipschitzian and totally asymptotically quasi-nonexpansive mapping with sequences satisfying and and strictly increasing mapping with Let and be sequences in and suppose that the following conditions are satisfied:- (C1)
there exist constants such that for all
- (C2)
there exists a constant M such that for all
Then defined by:is ▵
-convergent to some Proof. Since T is uniformly L-Lipschitzian, we have T is continuous. By using Theorem 5, we get Next, we will divide the proof into three steps.
Step 1. First, we will prove that
exists for each
where
is defined by
. For this purpose, let
using the fact that
and by the condition
we obtain:
for all
Also, we have:
for all
From
–
and using the fact that
we conclude that:
where
and
Forasmuch as
and
it follows that
and
Hence by Lemma 1,
exists.
Step 2. In this step, we will prove that
Without loss of generality, we may assume that:
From
, we conclude that:
Now, Using the fact that
T being a totally asymptotically nonexpansive mapping and
, we have:
By the same above argument, we get:
Now, we can write:
by arranging the above inequality, we conclude that:
which implies that:
From
and
, we have:
By using Lemma 2 with
,
and
, we have:
From
and
, we have:
Now, by Combining
and
, we have:
Again, by using Lemma 2 with
,
and
, we have:
Using the definition of totally asymptotically nonexpansive mapping and
, we conclude that:
Also, by the same argument and
, we have:
By using the triangle inequality and
and
, we have:
Again, by using the triangle inequality and
and
, we have:
Finally, with
and
, we conclude that:
Therefore, Step 2 is proved.
We claim that the sequence ▵-converges to a fixed point of T and consists of exactly one point. Assume that From the definition of there is a subsequence of such that From assertion in Lemma 3, there exists a subsequence of such that Using Lemma 4, we conclude that Since converges, by assertion in Lemma 3, we obtain Therefore Finally, we show that consists of exactly one point. Let be a subsequence of such that and let We have already seen that Since converges, by assertion in Lemma 3, we have , that is, This completes the proof. ☐
Remark. We note that each nonexpansive mapping is an asymptotically nonexpansive mapping with a sequence for all and each asymptotically nonexpansive mapping is a -totally asymptotically nonexpansive mapping with two sequences and for all and ψ being the identity mapping. Also, we see that each asymptotically nonexpansive mapping is a uniformly L-Lipschitzian mapping with
3.1. Numerical Results
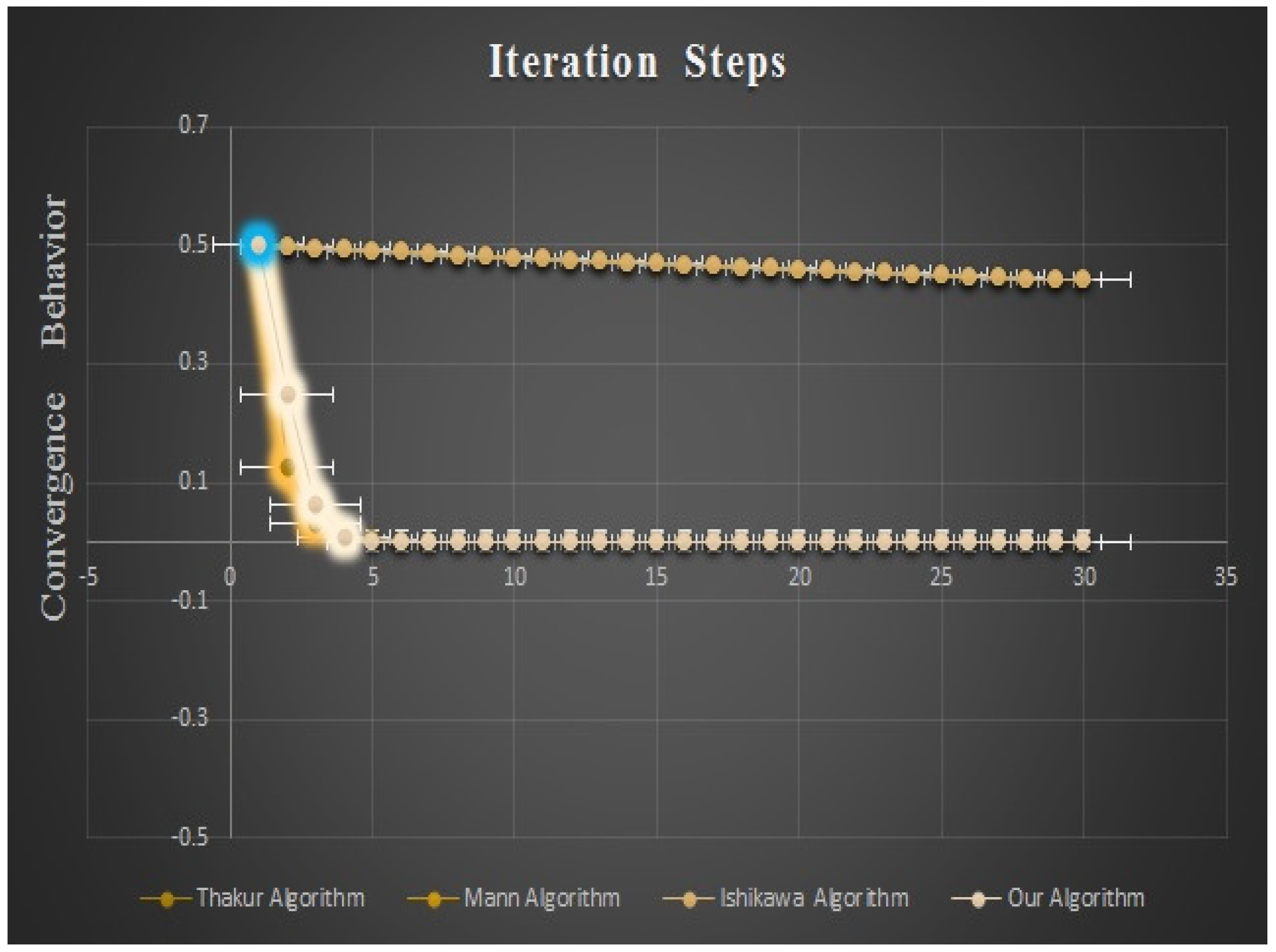
In the following, we supply a numerical example of totally asymptotically quasi-nonexpansive mappings satisfying the conditions of Theorem 6, and some numerical experiment results to explain the conclusion of our Algorithm .
Example 1. Consider with its usual metric, so X is also a complete CAT(0) space. Let which clearly is a bounded closed convex subset of X. Define the mapping by Let be a strictly increasing mapping with Let and for all Since the sequences satisfying as for all we have:
So
T is a totally asymptotically quasi-nonexpansive mapping. Clearly, zero is the only fixed point of the mappings
T. Put
By using MATHEMATICA, we computed the iterates of Equation
for initial point
Finally, by the numerical experiments we compared Mann iteration process, Ishikawa iteration process and Thakur iteration process with our Equation
(see
Table 1). Moreover, the convergence behaviors of these algorithms are shown in
Figure 1. We conclude that
converges to zero.
Example 2. Consider equipped with the Euclidean norm. Let then the squared distance of x from the origin is:
Consider
as the closed unit disk:
which is bounded, closed, and convex in
X. We define the mapping
by:
Let
. It is easy to see that
is nonexpansive, since for all
we have:
Let
be a strictly increasing mapping with
and let
and
for all
Since the sequences
and
satisfy
as
, it follows that for all
and
we have:
This means that
is a totally asymptotically quasi-nonexpansive mapping. Clearly, zero is the only fixed point of the mapping
for
In this case, our algorithm is the following:
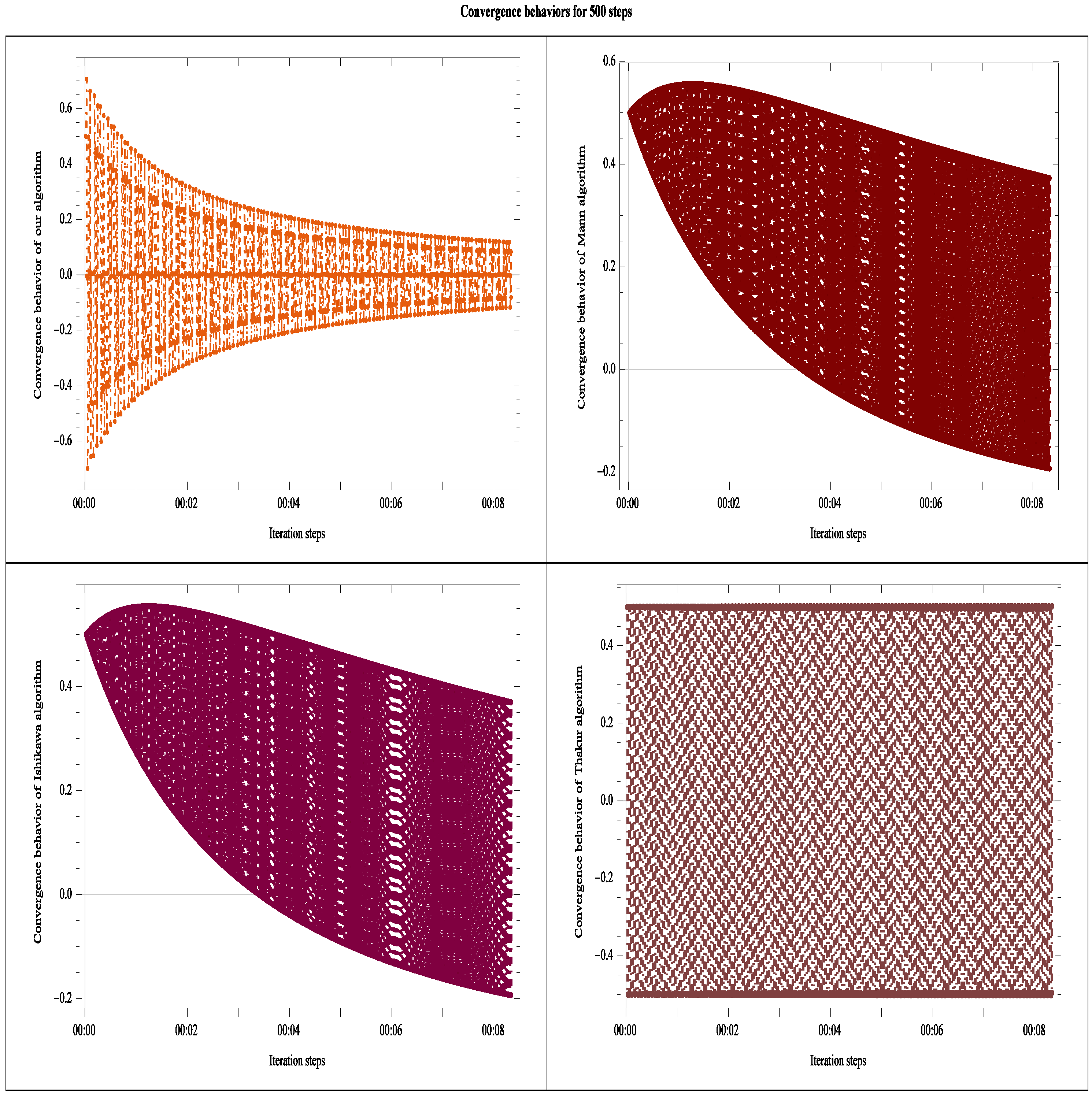
Put
By using MATHEMATICA, we computed the iterates of Algorithm
for initial point
for 500 steps. Finally, by the numerical experiments we compared Mann iteration process, Ishikawa iteration process and Thakur iteration process with our Algorithm
(see
Table 2). The convergence behaviors of these algorithms are shown in
Figure 2. The conclusion is that
converges to zero.






{kind=link}
{kind=link}