1. Introduction
The optimization problem is finding the optimal set of control variables, whether continuous or discrete. Accordingly, the optimization problems can be classified into; discrete or continuous. Constrained and multimodal problems are examples of optimization problems [
1,
2].
The optimization problems are highly significant from both the manufacturing and scientific perspective. It is a vital and challenging area, especially in engineering designs that have efficient form and are more accurate. Besides, the feasible region may be a narrow subset of the search domain. Also, according to the presence or absence of equality or inequality constraints, optimization problems are categorized into constrained and unconstrained problems. Traditionally, for the unconstrained optimization problems, many techniques were classified into direct search and gradient-based methods. While the constrained optimization problems algorithms are classified into indirect and direct methods. These traditional optimization techniques are insufficiently robust in discontinuous, vast multimodal, and noisy search spaces [
3,
4].
Due to the shortcomings of traditional optimization approaches, meta-heuristic techniques have been introduced for handling optimization problems. Meta-heuristic algorithms are the most exemplary optimization algorithms due to their robustness, performance reliability, simplicity, and ease of implementation, among other benefits. There are various types of meta-heuristic algorithms, including:
(1) Evolutionary algorithms: These algorithms, such as the genetic algorithm (GA) [
5,
6,
7,
8], differential evolution algorithm (DEA) [
9], and evolutionary strategy algorithm (ESA) [
10], are based on evolutionary theory. The evolutionary algorithms apply the search during simulation of the inspired process by selection and reproduction, to find the optimum solution. They are global optimization methods, that scale well to higher-dimensional problems, as they are robust concerning noisy evaluation functions. However, they may not find the global optimum solution, can stick to a local minimum and consume iterations without improvement, and require relatively high computational.
(2) Swarm-based algorithms: Swarm-based algorithms are considered the most basic forms of meta-heuristic algorithms. These algorithms modeled the behavior and characteristics of swarms’ systems, leading to the coining of the term “swarm intelligence” (SI) by Gerardo Beni and Jing Wang in 1989 [
11]. Swarm intelligence algorithms (SIAs) are linked to the study of swarms, or colonies of social animals, where research into social behavior in swarms of organisms encouraged the invention of several practical optimization algorithms. These algorithms simulate the social behavior and decision-making of various social groupings, such as particle swarm optimization algorithm (PSOA), ant colony optimization algorithm (ACOA), grasshopper optimization algorithm (GOA), and manta-ray foraging optimization algorithm (MRFOA) [
12,
13,
14,
15,
16,
17], etc. There are several advantages to swarm-based algorithms such as they respond to internal disturbances and external challenges and complete operations even with the failure of some agents. Also, they are self-organized, which means that the solutions are emergent than pre-defined. Furthermore, the swarm system is updated based on predetermined and new stimuli, and the agents’ operations are implemented in a parallel manner. However, they have some drawbacks: the swarm’s function cannot be predicted according to the agent’s function. In addition, it is difficult to predict the behavior from the individual rules. Besides, they are sensitive to small changes in their laws where any change could lead to an unexpected group level.
(3) Human social behavior-based algorithms: These algorithms are based on human social behavior, such as group teaching optimization algorithm (GTOA), imperialist competitive algorithm (ICA), and teaching-learning based optimization algorithm [
18,
19,
20,
21,
22], etc. These types of algorithms allow the social phenomena to be a valuable source of inspiration for algorithms. The efficiency and effectiveness of these algorithms may be better than other swarm intelligent mechanisms that animal groups inspire. However, they have the same drawbacks as swarm-based algorithms.
(4) Physics-based algorithms: Natural physics laws have been utilized to develop physics-based algorithms such as the gravitational search algorithm (GSA) [
23], magnetic optimization algorithm (MOA) [
24], and the simulated annealing (SA) [
25], etc. In the GSA algorithm, according to Newton’s universal law of gravitation, larger particles will have more attraction power than smaller particles. Hence, smaller ones are attracted to the larger ones. Consequentially, all smaller particles will be drawn toward the largest particle. The largest particle can resemble the global optimum solution in the case of optimization. While the probable solutions in the MOA are magnetic particles distributed throughout the search space. According to its fitness, each magnetic particle has a mass and magnetic field measurement. Magnetic particles with a larger magnetic field and mass are more suitable. These particles live in a lattice-like environment and attract their neighbors with a force of attraction. The proposed cellular structure allows for greater exploitation of local neighborhoods before they progress to the global best, increasing population variety. Also, SA [
25] is one of the physics-based popular algorithms. SA is a random-search technique that simulates how a metal cools and freezes into a minimum energy crystalline structure (the annealing process) and searches for a minimum in a system. These algorithms can deal with arbitrary systems and cost functions, almost guarantee to find an optimal solution, and are relatively easy to code, even for complex problems. However, these metaheuristic algorithms require many choices to turn them into actual algorithms. Besides, they may become very slow, especially if the cost function is expensive to compute. The precision of the numbers used in implementing these algorithms can significantly affect the speed and ability to reach the solution.
The MRFO algorithm [
17] is a bio-inspired swarm intelligence optimizer that simulates the food search proclivities of the manta ray. According to three inclinations, Manta ray searches for food: chain foraging, cyclone foraging, and somersault foraging. Foraging manta rays line up in an organized manner to capture lost prey missed or undetected by the last manta ray in the chain in a process known as chain foraging. This cooperative interaction between competing manta rays reduces the possibility of prey loss in their eyesight and increases food rewards. Foraging by a cyclone occurs when there is a high density of prey.
However, MRFO is not good at fine-tuning solutions around optima due to its stochastic nature and slow convergence speed. Also, it may stick to a local minimum, leading to consuming iterations without reaching the optimal solution. Due to the above drawbacks, several modifications were applied to MRFO to enhance its performance. The combination of the SA and MRFO algorithms is presented in [
26]; where the SA algorithm is used to describe the initial population of the MRFO algorithm, which speeds up convergence significantly. However, falling into a local minimum still represents a critical issue in the algorithm. In [
27], an elegant approach is proposed based on MRFO integrated with a gradient-based optimizer (GBO). The proposed MRFO-GBO aims to decrease the risk of the original MRFO being stuck in local optima while also speeding up the solution process. It depends on a local escaping operator (LEO) to update the current solution. However, the LEO operator generates a new solution using several solutions (the best and other randomly selected solutions), which does not guarantee a better solution. In [
26], the opposition-based learning (OBL) methodology was combined with MRFO to obtain an appropriate structure for optimization problems. The hybrid algorithm aimed to benefit from OBL to produce a more performant algorithm. However, it depends on computing all the population’s opposite solutions, and consequently, the computational load increases.
The ‘unit commitment’ (UC) problem in power systems aims to determine the startup and shut down schedules of generating units to meet forecasted demands over a definite period. The objective is to minimize the total production cost while satisfying all problem constraints. The global optimum solution can be obtained by exploring all possible solutions and choosing the one having the minimum objective value. However, in realistic power systems, this is not applicable. Therefore, researchers used different algorithms to find a satisfactory solution to achieve the constraints and objectives within a reasonable time [
28].
Various approaches and several mathematical techniques have been proposed for solving the UC problem. Several inspired algorithms were applied to solve the UC problem due to their capability to handle nonlinear, mixed-integer, and large-scale problems. Besides, they can manage non-convex fuel cost functions with non-linear constraints. Some of the most commonly used algorithms are artificial neural network [
29], simulated annealing [
30], grey wolf optimizer [
31], genetic algorithm, and particle swarm optimization technique [
32,
33]. Also, hybrid meta-heuristic optimization techniques have been applied to the UC problem considering the advantages and features of each optimization technique [
34,
35].
To improve the standard MRFO performance, this paper presents a hybridization of the manta-ray foraging optimization (MRFO) algorithm with a pseudo-parameter-based genetic algorithm (GA). The proposed algorithm is abbreviated as PGA-MRFO. The proposed algorithm applies the MRFO with its classical procedure until it is stuck in a local minimum. Then, the assumption of the pseudo parameter is used, leading to reducing the number of input variables in the GA. Finally, the GA will be applied to get out of the local minimum. Then, the assumption of the pseudo parameter is used, leading to reducing the number of input variables in the genetic algorithm. Finally, the GA will be applied to get out of the local minimum. Then, the search process will continue using the classical MRFO until it falls into a local minimum again. These processes are continued until the termination criterion is satisfied, at which point the best manta ray is reported as the final solution. The main contributions of the proposed algorithm can be summarized as follows:
The manta-ray foraging optimization (MRFO) technique is proposed to be combined with a pseudo-parameter-based genetic algorithm (GA) to overcome and improve the poor performance of standard MRFO.
The GA’s objective function depends only on three variables, whatever the number of independent variables in the problem. The dimension of the optimization problem will not affect the number of the GA’s variables leading to less computational burden.
The suggested approach uses GA to take out the manta-ray algorithm from any local minimum to a better local minimum until an optimal solution is found.
The rest of the paper is organized as follows:
Section 2 represents an overview of the MRFO algorithm.
Section 3 illustrates the proposed algorithm with its flowchart and pseudo-code.
Section 4 shows the results and comparisons based on five test functions. A practical application of the proposed algorithm to solve one of the most critical issues in the electrical power systems (unit commitment) problem is introduced in
Section 5.
Section 6 presents the proposed algorithm’s uncertainty, robustness, and computational time analysis. Finally,
Section 7 introduces the conclusion.
2. MRFO Overview
Manta beams are extravagant animals. However, they have all the earmarks of being horrible. A grown-up manta beam can eat 5 kg of tiny fish regularly. They have developed an assortment of unique and astute scrounging methodologies. The primary scavenging technique is chain searching. When at least 50 manta beams begin scrounging, they line up, one behind another, shaping a precise line. More modest male manta beams are piggybacked upon female ones and swim on top of their backs to coordinate with the beats of the female’s sectoral balances. The second searching system is tornado scavenging.
Many manta beams assemble when the centralization of tiny fish is exceptionally high. Their last parts interface up with heads in twisting to create a spiraling vertex in the eye of the twister, and the separated water climbs towards the surface, which maneuvers the microscopic fish into their open mouths. The final foraging strategy is somersault foraging. Its behavior is one of the most splendid sceneries in nature. When manta rays find a food source, they will do a series of backward somersaults, circling the plankton to draw it towards manta rays. Somersault is a random, frequent, local and cyclical movement that helps manta rays optimize food intake.
In MRFO, manta rays can observe the position of plankton and swim towards it. The higher the concentration of plankton in a place, the better the situation is. Although the best solution is unknown, MRFO assumes the best solution found so far is the plankton with a high concentration of manta rays that want to approach and eat. Manta rays line up head-to-tail and form a foraging chain. Individuals except for the first move towards the food and the one in front of it. In each iteration, the individual is updated by the best solution and the solution in front of it. Chain individual foraging can be modeled as follows:
The position update of the
ith individual is determined by the position
of the (
i−1) the current individual and the position
of the food. When a school of manta rays recognizes a patch of plankton in deep water, they will form a long foraging chain and swim towards the food by a spiral. A similar spiral foraging strategy can be found in WOA. In the cyclone foraging strategy, each manta ray swims toward the one in front of it. The manta ray swarms in line, developing a spiral perform foraging. Individual not only follow the one in front of it but only moves toward the food along a spiral path. This motion behavior may be extended to an n-D space. For simplicity, this mathematical model of cyclone foraging can be defined as:
In somersault foraging behavior, the position of the food is viewed as a pivot. Each individual swims to and from around the pivot and somersaults to a new position. Therefore, they constantly update their positions around the best position. The mathematical model can be created as follows:
MRFO starts by generating a random population in the problem domain as with other metaheuristic optimizers. Each updates its position according to the one in front of it and the reference position at each iteration. The value of the ratio increases from to 1, respectively, perform the exploratory and exploitative search. The current best solution is chosen as a reference for exploitation when the ratio . However, when the ratio , a random position in the search space, is selected as a reference position for the exploration.
Meanwhile, MRFO can switch between the chain foraging behavior and the cyclone foraging behavior according to the random number. Then individuals update their positions concerning the best position found so far by somersault foraging. All the updates and calculations are interactively performed until the stop criterion is met. Eventually, the best individual’s position and fitness value are returned. Algorithm 1 illustrates the pseudo-code of the MRFO algorithm.
| Algorithm 1. Pseudo-code of MRFO algorithm. |
![Mathematics 10 02179 i001]() |
According to the MRFO algorithm procedure, the best solution will not be updated if the current fitness function is not better than the previous iteration. Consequently, the algorithm will be stuck in the reached local point. As a result, an additional procedure should be applied to get it out from this local minimum point.
3. The Proposed Algorithm (PGA-MRFO)
3.1. Flow Chart and General Description of the Algorithm
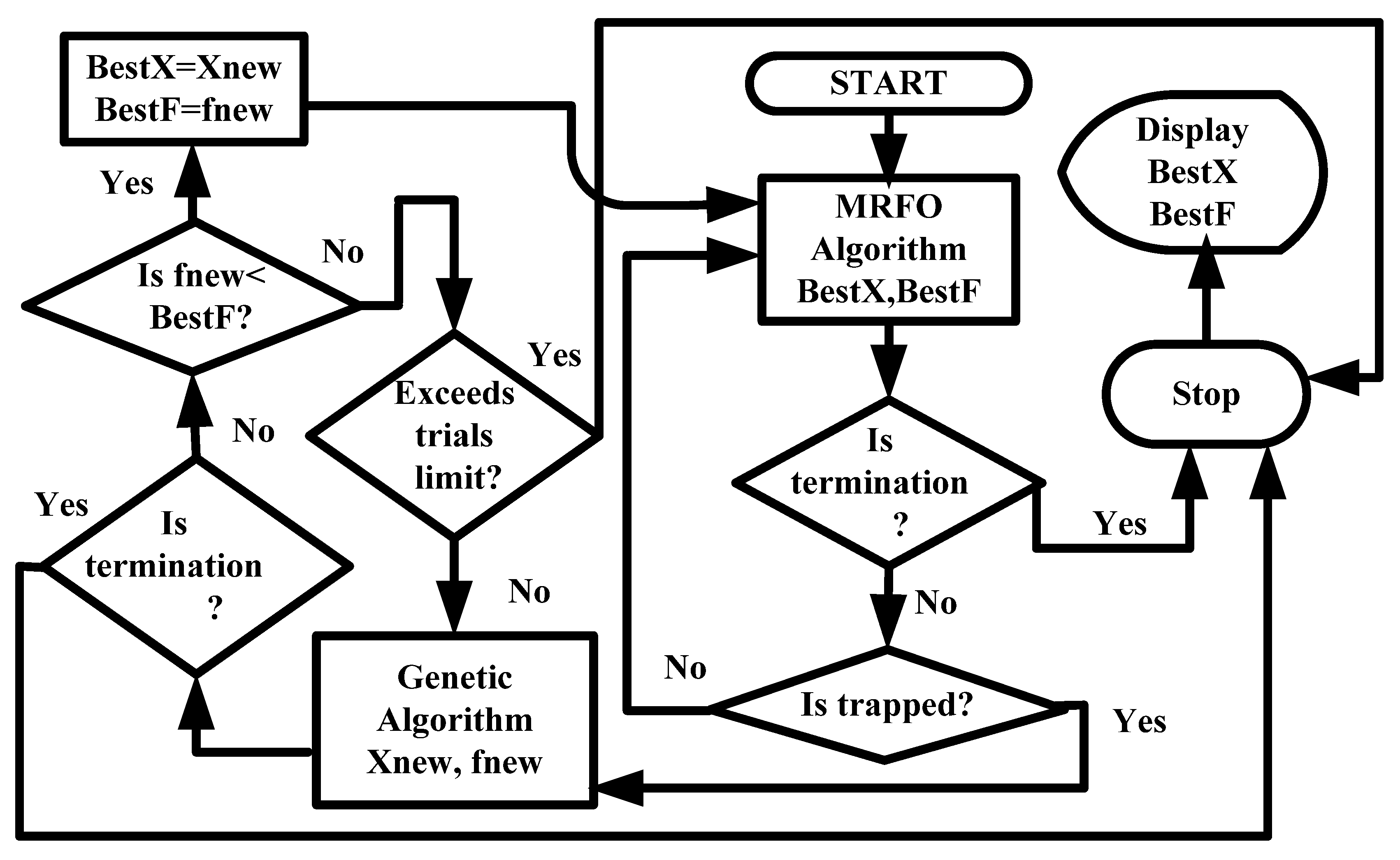
Figure 1 shows the flow chart of the proposed algorithm. The MRFO is applied until it falls into a local minimum point. Then, the genetic algorithm (GA) is used according to specific variables and the objective function until a better solution is obtained. The resulting solution and corresponding objective value are entered into the MRFO as the best solution and fitness function to complete the optimization process. The fundamental steps are repeated until the termination criterion is reached.
3.2. Mathematical Formulation of the Genetic Objective Function
Each variable in the system can be represented as a function of a parameterization parameter (
s); each variable can be written as:
Also, the objective function can be stated as a function of the parameterization variable. It can be written as:
Then, the domain of parameterization parameter can be estimated as:
where
Equation (13) states that the parameterization parameter domain is bounded by the minimum and maximum values of lower and upper limits of the system variables, respectively.
Theorem 1. (First Order Necessary Condition for (Local) Optimality) [2]. If
is an unconstrained local minimizer of a differentiable function, then we must have According to the First Order Necessary Condition for (Local) Optimality) If
is an unconstrained local minimizer of a differentiable function
, then:
The derivative of the fitness function WRT, the parameterization parameter, can be written as:
According to Equation (6), Equation (15) can be written as:
As a vector form, Equation (16) can be written as:
The first vector represents the gradient of the objective function to the system variables. So, Equation (17) can be written as:
where,
According to the previous theorem, the gradient of Equation (19) can be approximated as:
where,
According to Equation (18), the gradient of the variables w.r.t. the parameterization parameter
can be calculated as:
where
is the pseudo-inverse (Moore-Penrose) of the approximated gradient. The resulting objective function from the GA should be less than the entered one. It can be written as:
After calculating the gradient (
. The updated values of the variables can be evaluated as:
Then, the fitness function of the new individual can be calculated as:
So that the variables of the GA will be {}.
The GA aims to reduce the absolute difference between the calculated fitness function of the new solution (
and the presumed enhanced fitness function (
. The fitness function in the GA can be written as follows:
The whole optimization problem that is presented to the GA is as follows:
The GA is applied based on the objective function in Equation (31) through the defined domain. If the enhanced solution is obtained, the genetic operations are terminated, and the resulted solution with its objective function is reintroduced to the MRFO algorithm. Otherwise, the GA continues based on the resulting solution until getting an enhanced solution and getting out of the local minimum point.
3.3. Detailed Steps of the Proposed Algorithm (PGA-MRFO)
In this section, the detailed steps of the proposed algorithm are explained.
Step 1: The MRFO is applied with its standard procedure until the termination condition, or it cannot update the best solution of the current iteration, which means falling into a local minimum.
Step 2: The GA is initialized with the best solution resulting from MRFO, the number of populations and generations, the domain of the genetic variables ( and other genetic parameters. Then, the initial population of the GA is created.
Step 3: For each individual, the new solution is calculated according to Equations (27) and (28). Then, its objective function is calculated according to Equation (29), and the corresponding fitness function of the GA is calculated according to Equation (30).
Step 4: The rest of the GA’s operations continue until the maximum number of generations is terminated. The best solution yielded from the GA ( will satisfy one of the following three cases.
- (a)
It may satisfy the problem’s termination (stopping) criterion. Then, it will be approved as the optimum solution, and the search process will be terminated.
- (b)
If it is better than the trapped solution of MRFO, it will replace the MRFO’s trapping solution, and the MRFO algorithm is reapplied.
- (c)
Suppose the resulting solution is not better than the trapped solution of MRFO. In that case, it will be entered again into the GA to be improved according to the genetic objective function (step 2).
Step 5: Steps 1–4 are repeated until the termination (stopping) criterion is reached.
For further illustrations of the PGA-MRFO, the pseudo-code is detailed in Algorithm 2.
| Algorithm 2. Pseudo-code of PGA-MRFO. |
![Mathematics 10 02179 i002]()
![Mathematics 10 02179 i003]() |
Step 6: This step is added to avoid cycling if the GA fails to enhance the existing solution. The GA trials’ limit will be defined in the PGA-MRFO algorithm. If the GA fails to improve the solution in the current trial, its last population will be used as the initial population for the subsequent trial. Suppose the trial number exceeds the GA trials’ limit. In that case, the algorithm terminates, and the PGA-MRFO returns the best-calculated solution and its corresponding objective value as the local optimum solution to that problem. The GA trials’ limit is 5 in the proposed algorithm.
4. Testing Performance of PGA-MRFO Algorithm
The proposed algorithm was coded in MATLAB. 2020a, implemented with a Core (TM) i7, Intel(R) CPU with 3.2 GHz and 16 GB RAM. For computational studies, a population size of 50 and 1000 generations is used, the crossover fraction is 0.8, and all other parameters and functions were default as in GA Tool. Also, the termination criterion for both algorithms (MRFO and PGA-MRFO) is defined as = 1 × 10−6; where is the optimal objective of the test function, and is the calculated objective by the algorithm.
According to the MRFO test functions in [
18], ten test functions (F
5, F
7, F
8, F
13, F
14, F
15, F
20, F
21, F
22, and F
23) fall into a local minimum. So, both classical MRFO and PGA-MRFO algorithms will be applied to these ten test functions to verify the validation and reliability of the proposed (PGA-MRFO) algorithm. The results of each algorithm will be compared to the optimum solution based on the stopping criterion.
Table 1 compares the two algorithms according to the number of consumed iterations. In all test functions, the PGA-MRFO outperformed the conventional MRFO in achieving a lower value for
Fbest in fewer iterations, except for F
8, where it reached a better value for
Fbest in the same number of iterations, as shown in
Table 1. The results illustrate how the PGA-MRFO converged faster and was more reliable than the original MRFO.
Table 1’s last column indicates the suggested algorithm’s improvement as a percentage relation, which is determined as follows:
On the other hand,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11 show the converges curves to the optimum solution by the classical MRFO and the proposed PGA-MRFO algorithm for all test functions. From the table and figures, we can see that:
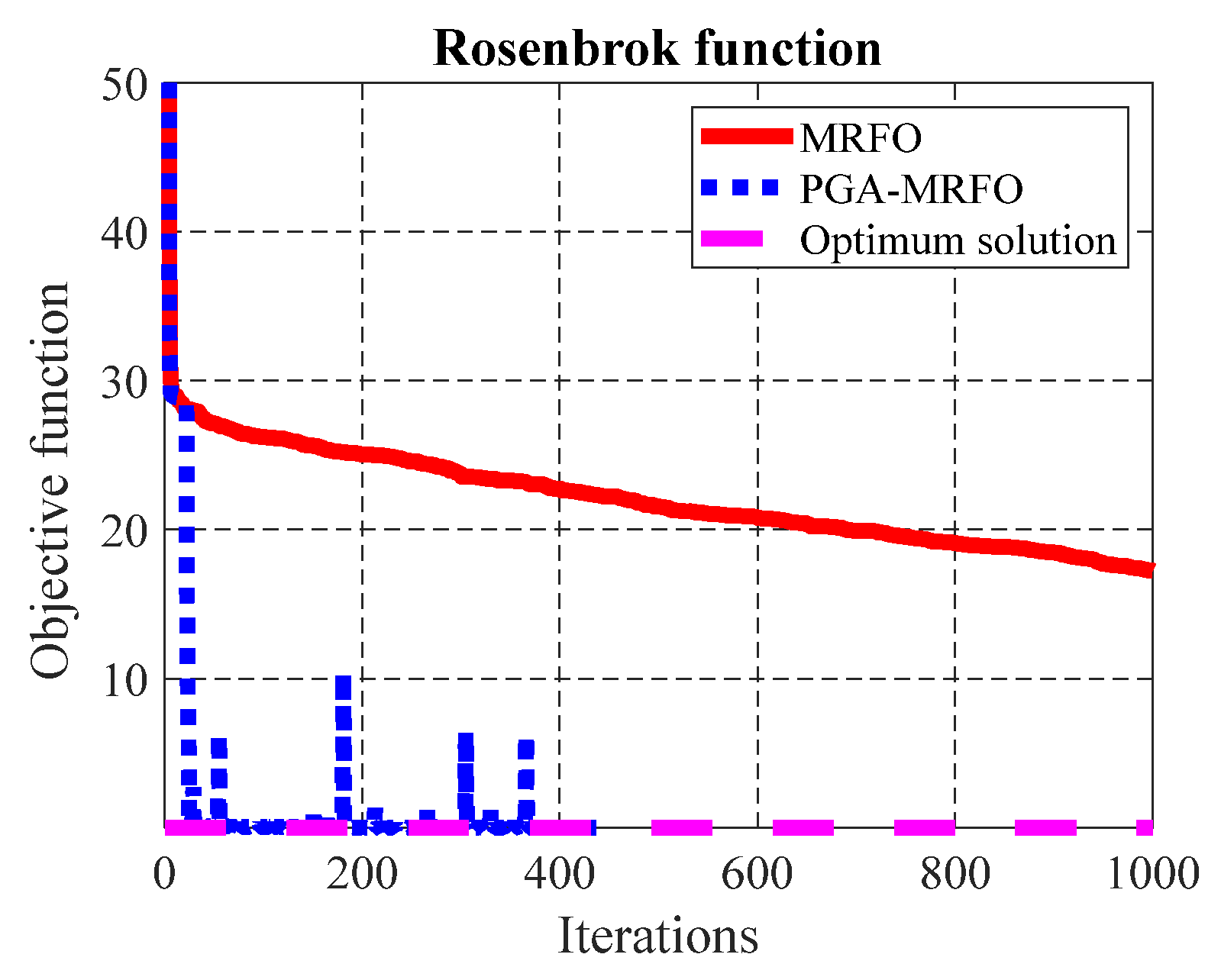
For F
5 (
Figure 2), the PGA-MRFO algorithm converges to the optimum solution in 438 iterations. But the MRFO algorithm consumed 1000 iterations and could not reach the optimum solution.
For F
7 (
Figure 3), the PGA-MRFO algorithm converges to the optimum solution in fewer iterations than the MRFO algorithm.
For F
8 (
Figure 4), both algorithms failed to reach the optimum solution during 1000 iterations. However, PGA-MRFO converged to a better solution than the MRFO algorithm in the same number of iterations.
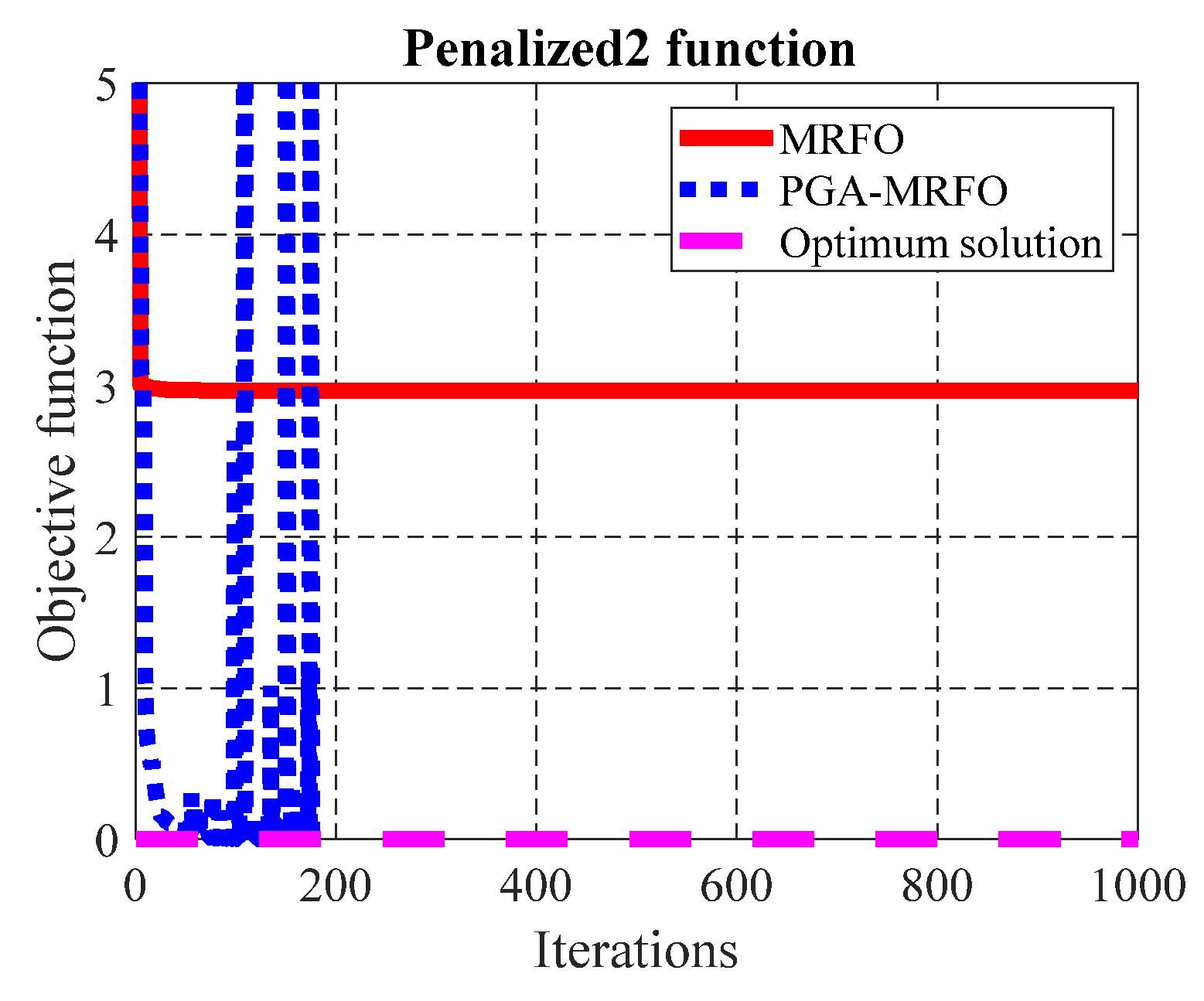
For F
13 (
Figure 5), the PGA-MRFO algorithm reached the optimum solution using 181 iterations. The MRFO algorithm consumed 1000 iterations and failed to converge to the optimum solution.
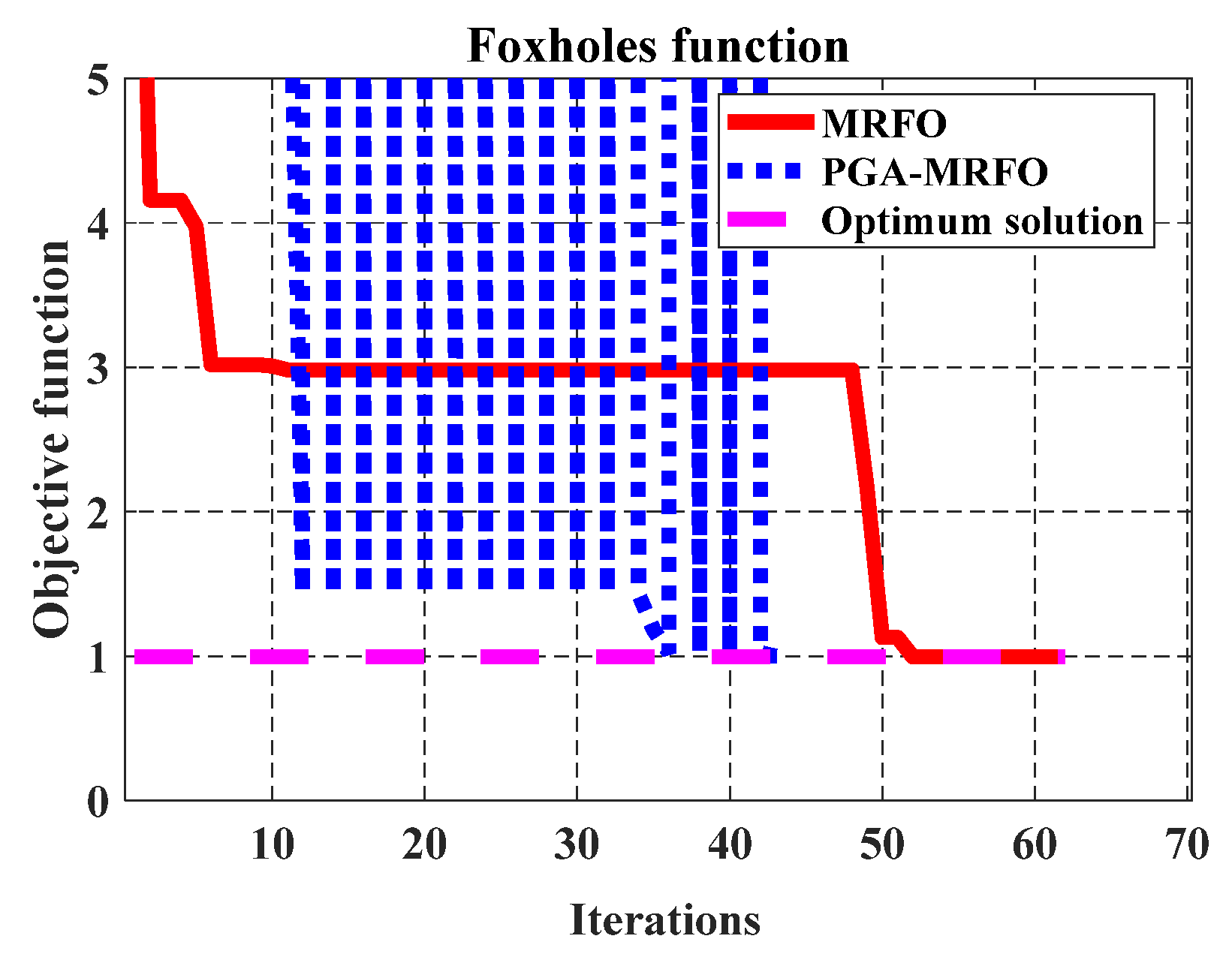
For F
14 (
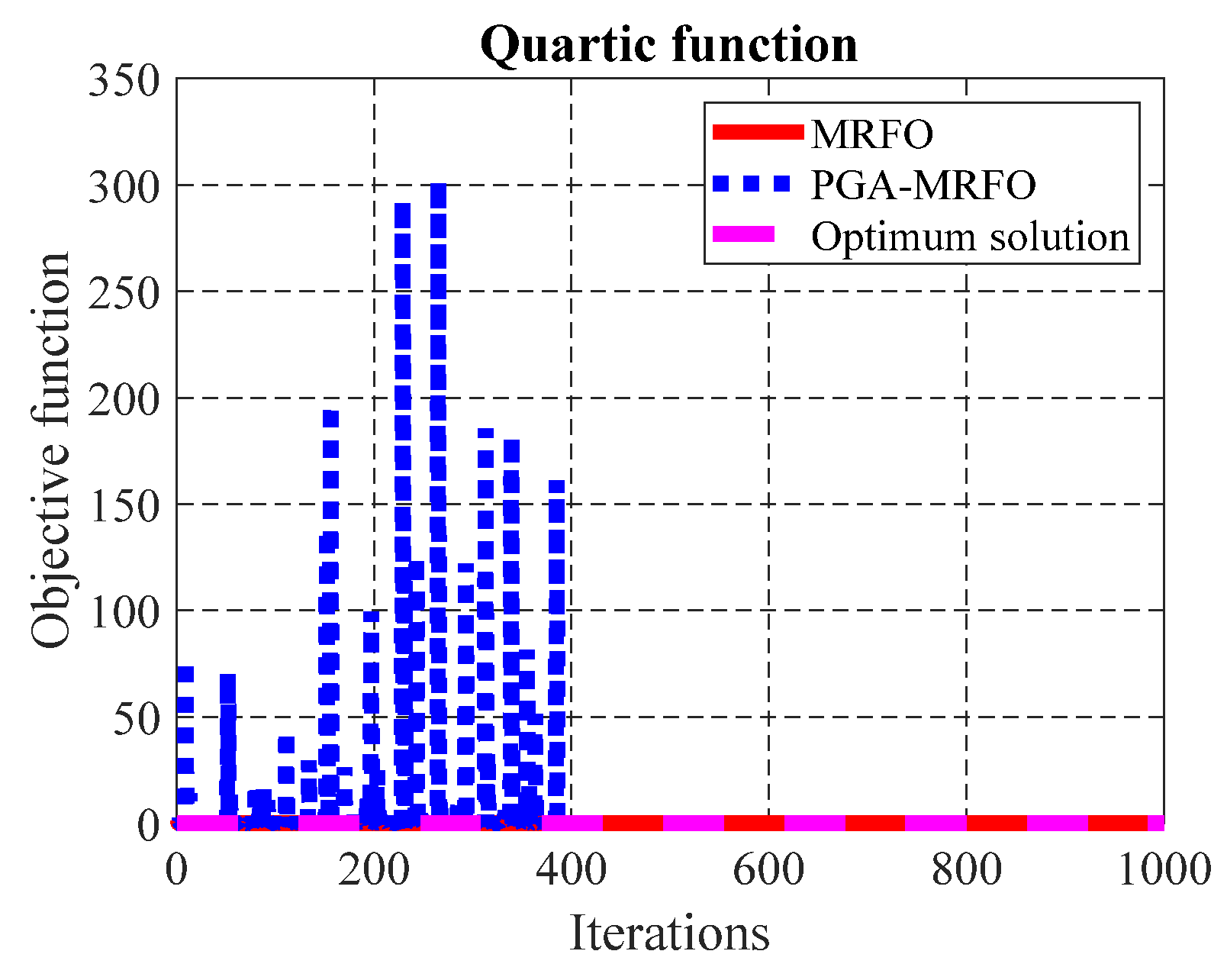
Figure 6), the PGA-MRFO reached the optimum solution in fewer iterations than the MRFO algorithm. It should be noticed that the fluctuations in the results using the PGA-MRFO algorithm represent the trials of the algorithm to get out of the local minimum and move to a better solution.
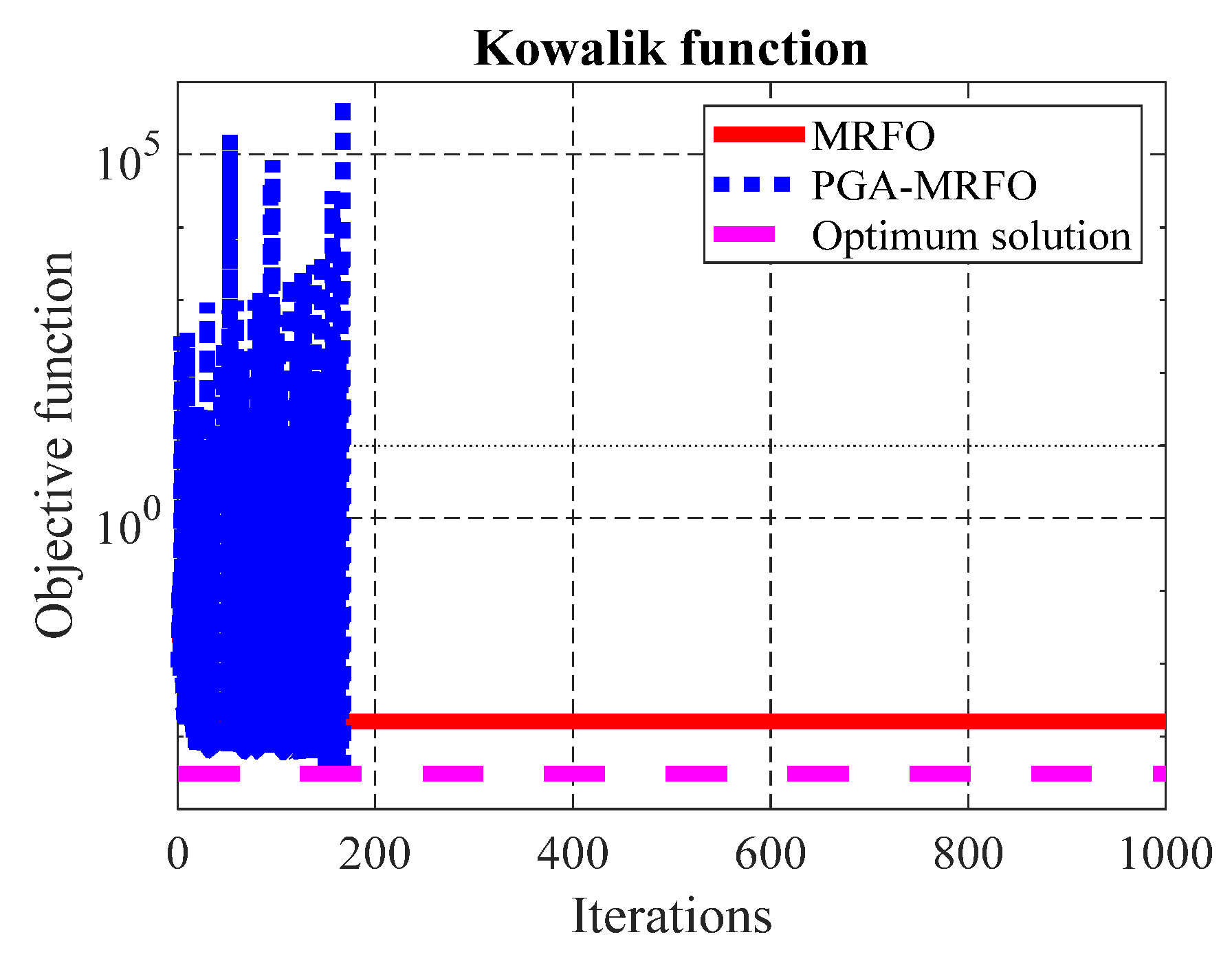
For F
15 (
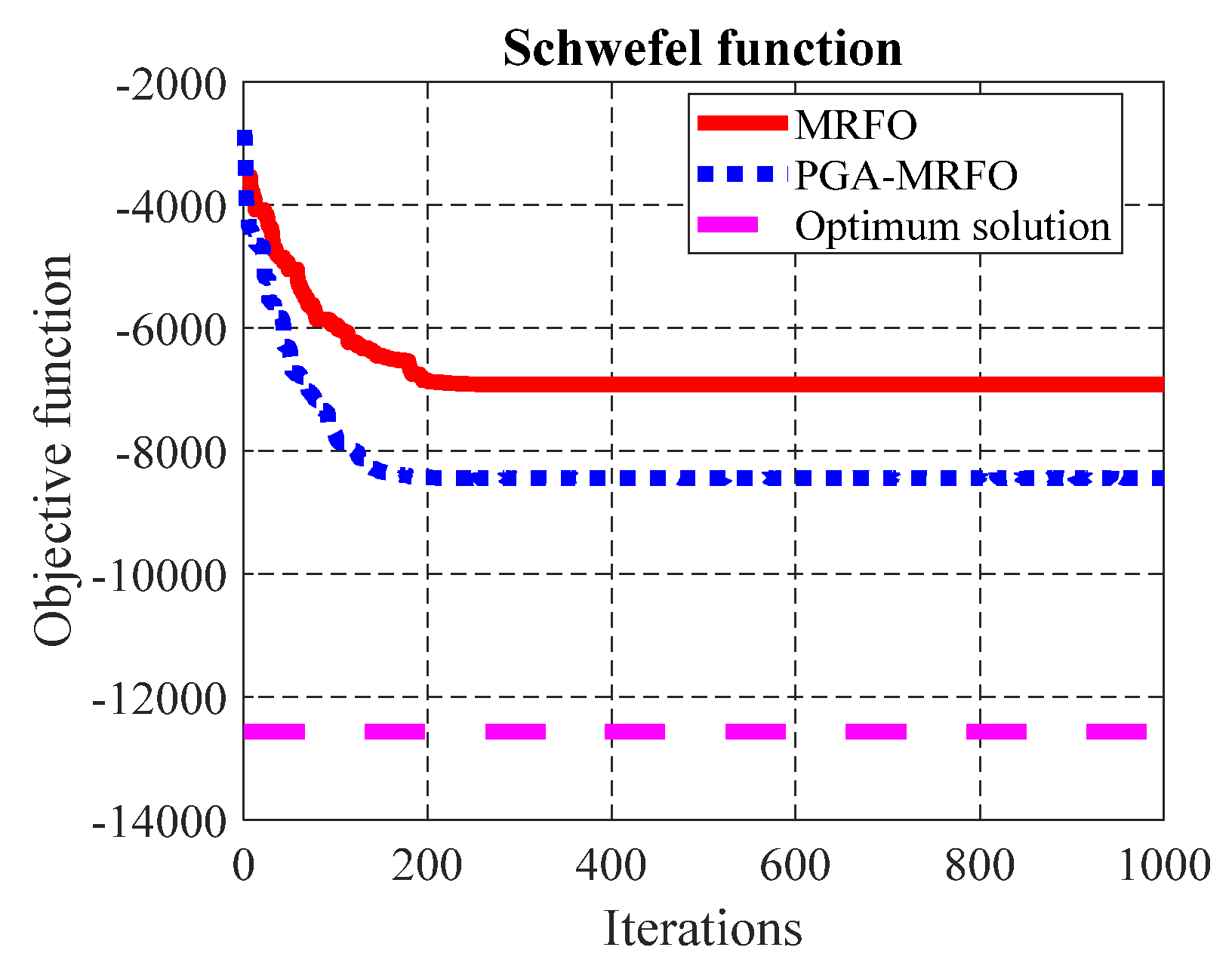
Figure 7), the PGA-MRFO reached the optimum solution in 169 iterations, while the MRFO algorithm could not get a near-optimal solution even after using 1000 iterations.
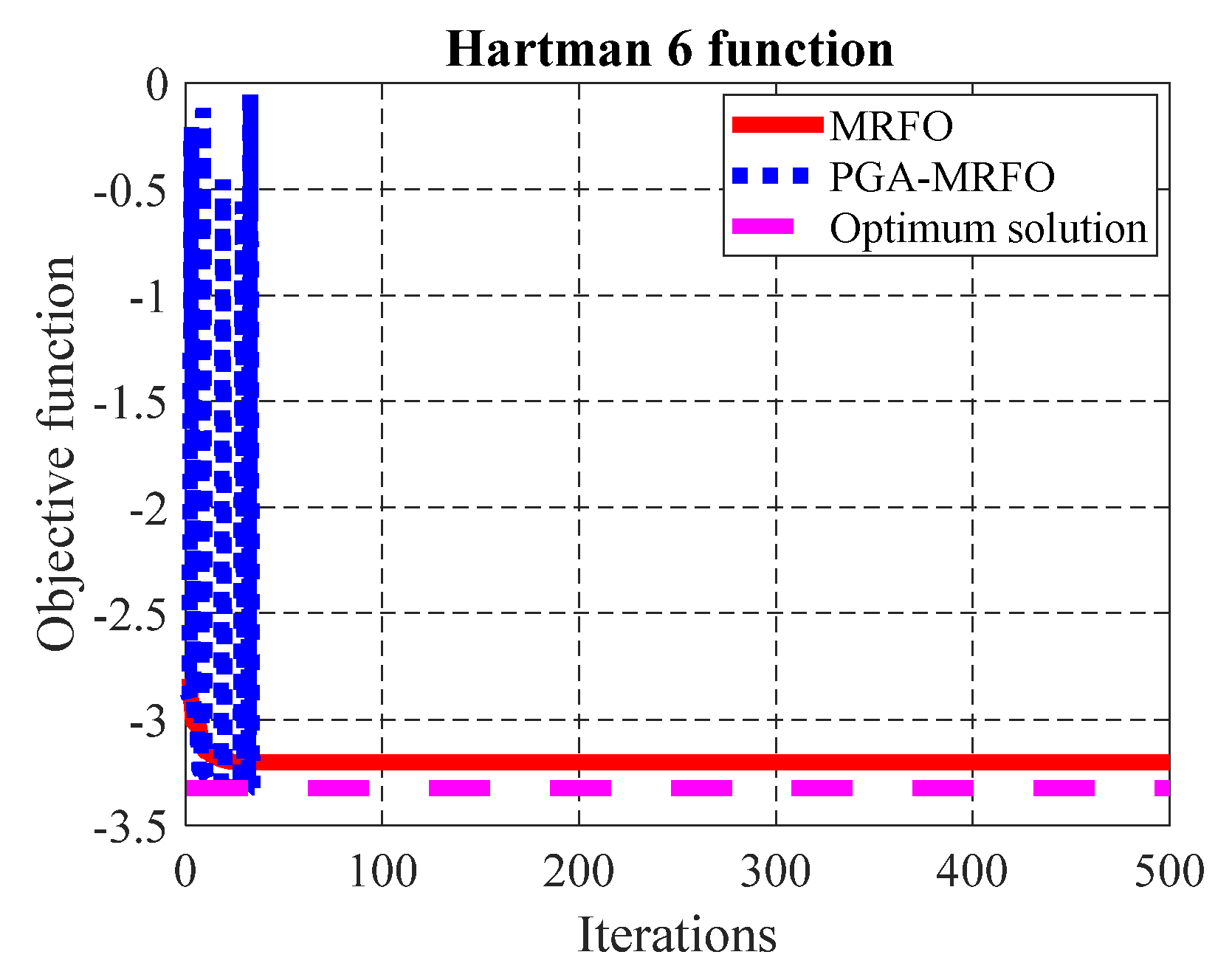
For F
20 (
Figure 8), the PGA-MRFO algorithm converges to the optimum solution in 35 iterations. But, the MRFO algorithm spent 500 iterations and could not reach the optimum solution due to trapping in the local minimum.
For F
21 (
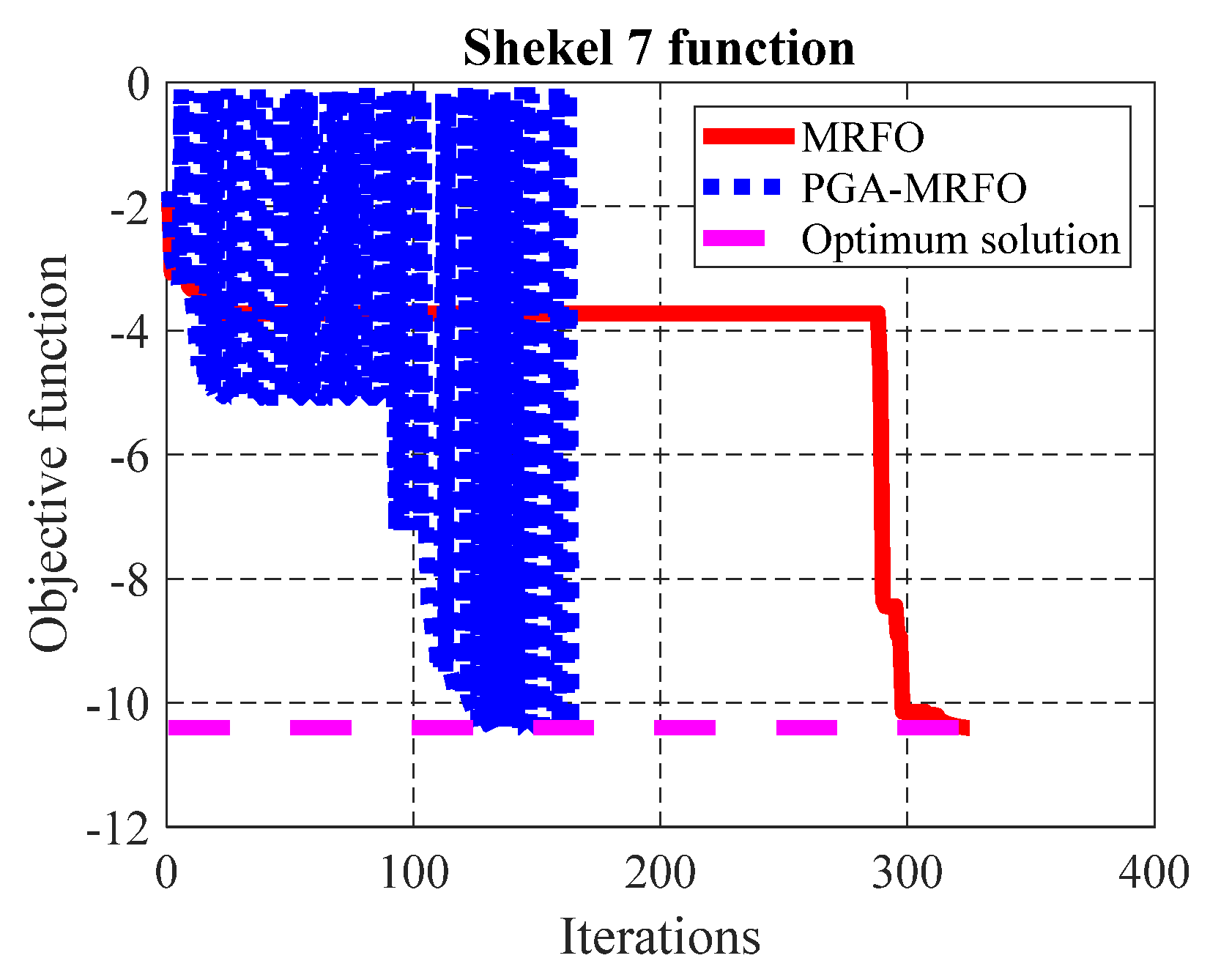
Figure 9), the PGA-MRFO algorithm got the optimum solution in 109 iterations. The MRFO algorithm consumed 1000 iterations without converging to the optimum solution due to falling into the local minimum.
For F
22 (
Figure 10), the PGA-MRFO algorithm got the optimum solution in 169 iterations. But, the MRFO algorithm needed 325 iterations to reach the optimum solution, where this number of additional iterations was wasted in trapping into the local minimum.
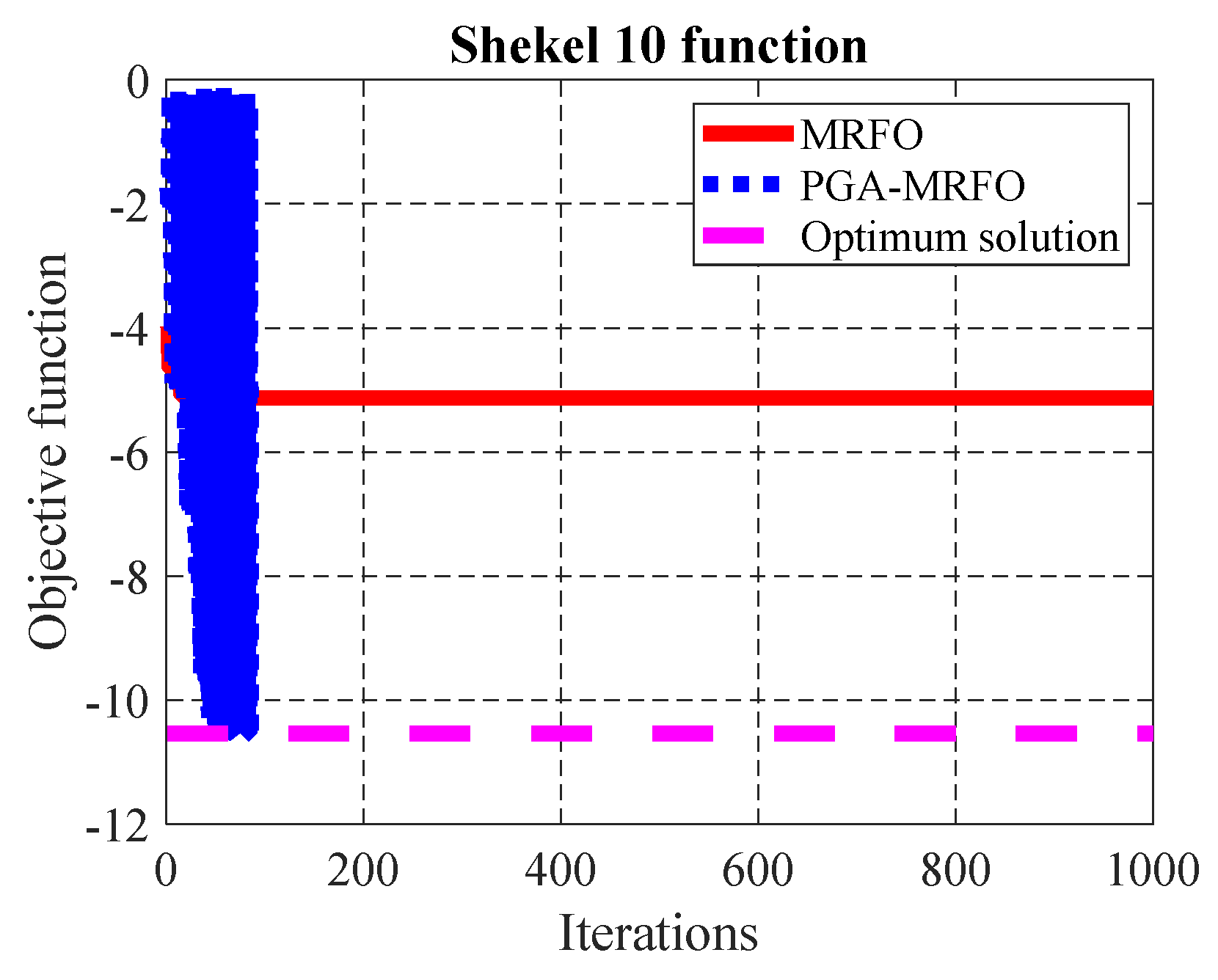
For F
23 (
Figure 11), the PGA-MRFO algorithm got the optimum solution in 87 iterations. In contrast, the MRFO algorithm spent 1000 iterations and could not converge to the optimum solution. The figure shows that the MRFO algorithm consumed more than 800 iterations with almost the same solution due to trapping into the local minimum. But, the PGA-MRFO algorithm fluctuated until getting out of the local minimum and reached the optimum solution.
To further clarify, both algorithms, classical MRFO and the PGA-MRFO, are applied to the 13 test functions with the possibility of increasing dimensions [
17]. The dimensions of these problems are increased to 100. Besides, the GA is applied to the same functions for more illustration of the comparison. The maximum number of generations is 50, and the population size is 20 for the three algorithms to accelerate the calculations for this high dimension’s cases.
Table 2 illustrates the results of the three algorithms and the related percentage improvement according to Equation (32). As shown in the table, for high-dimensional problems, the suggested approach can reach the desired tolerance in fewer iterations.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}