
Small Unmanned Surface Vessels—A Review and Critical Analysis of Relations to Safety and Safety Assurance of Larger Autonomous Ships
 ,
,  and
and 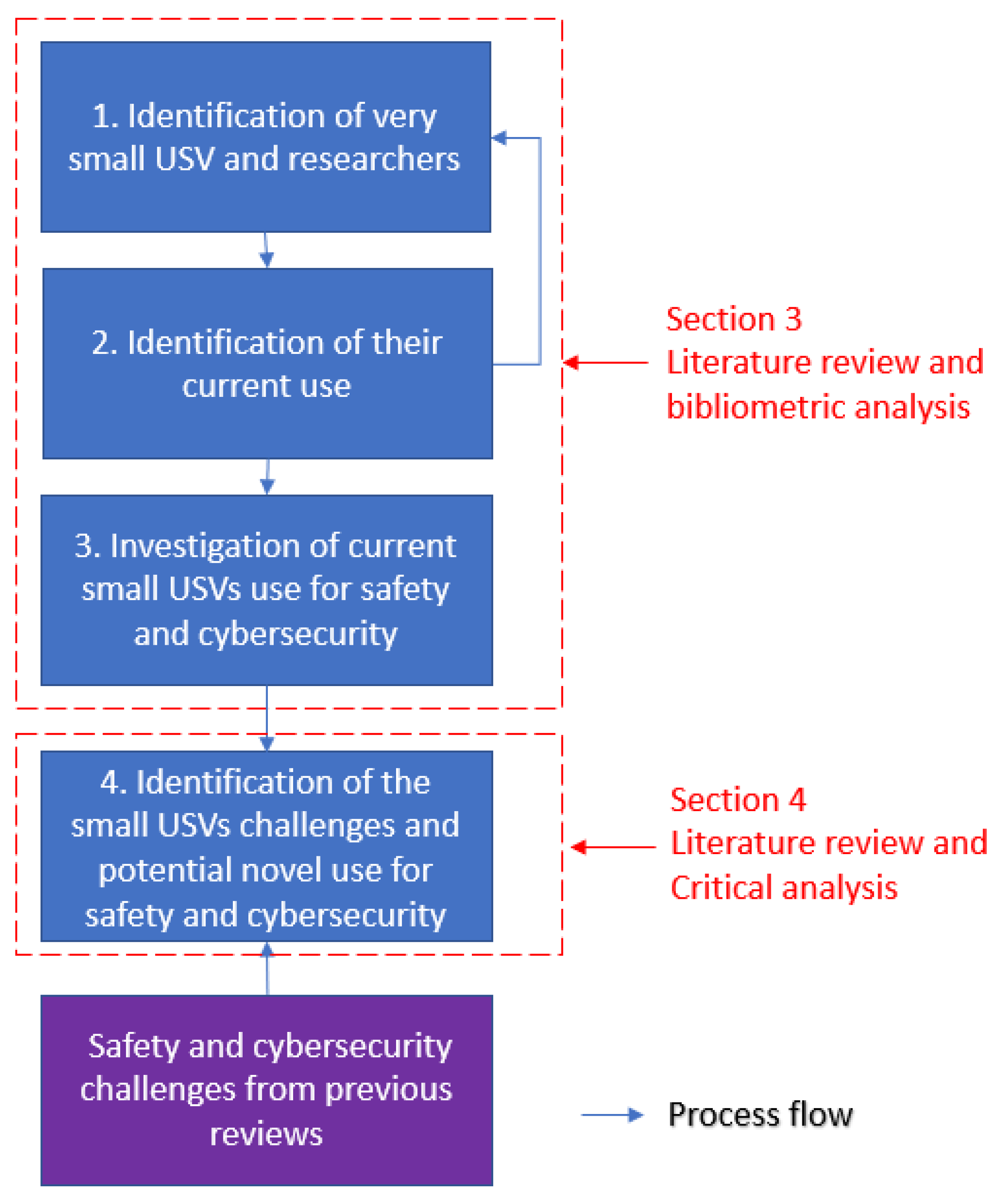{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodological Approach
3. Results
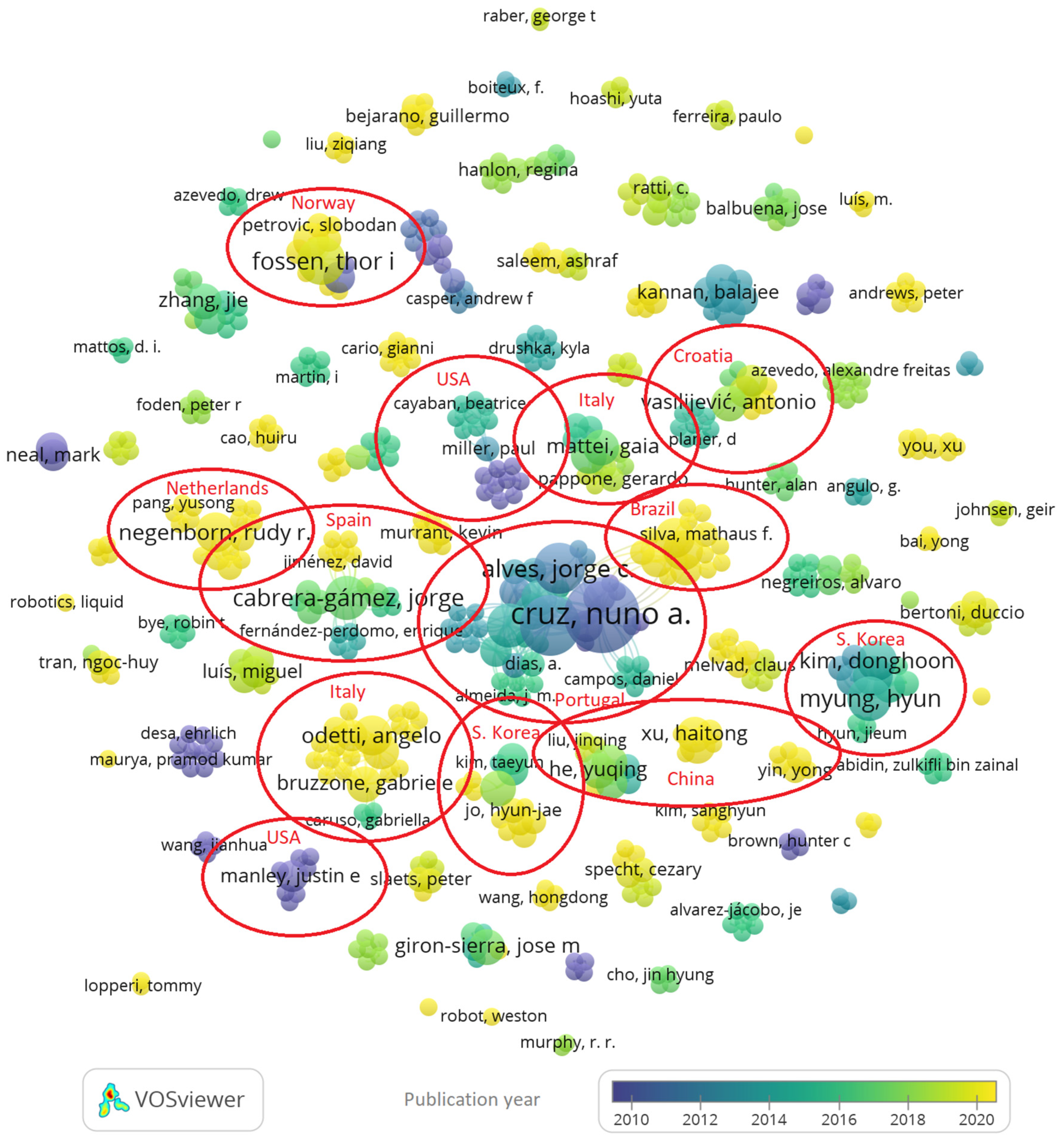
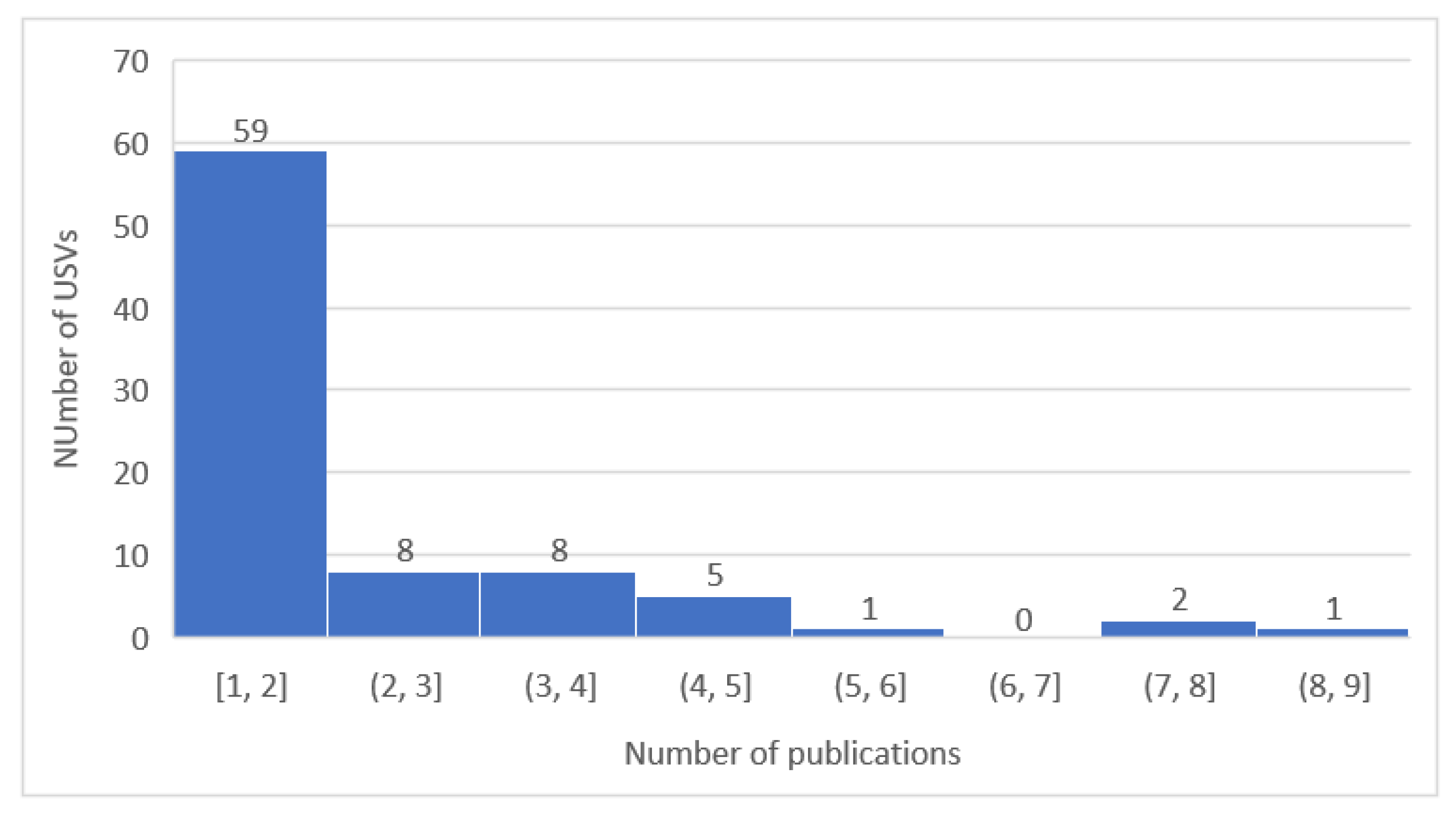
3.1. RQ1: Related Very Small USVs and Leading Research Groups
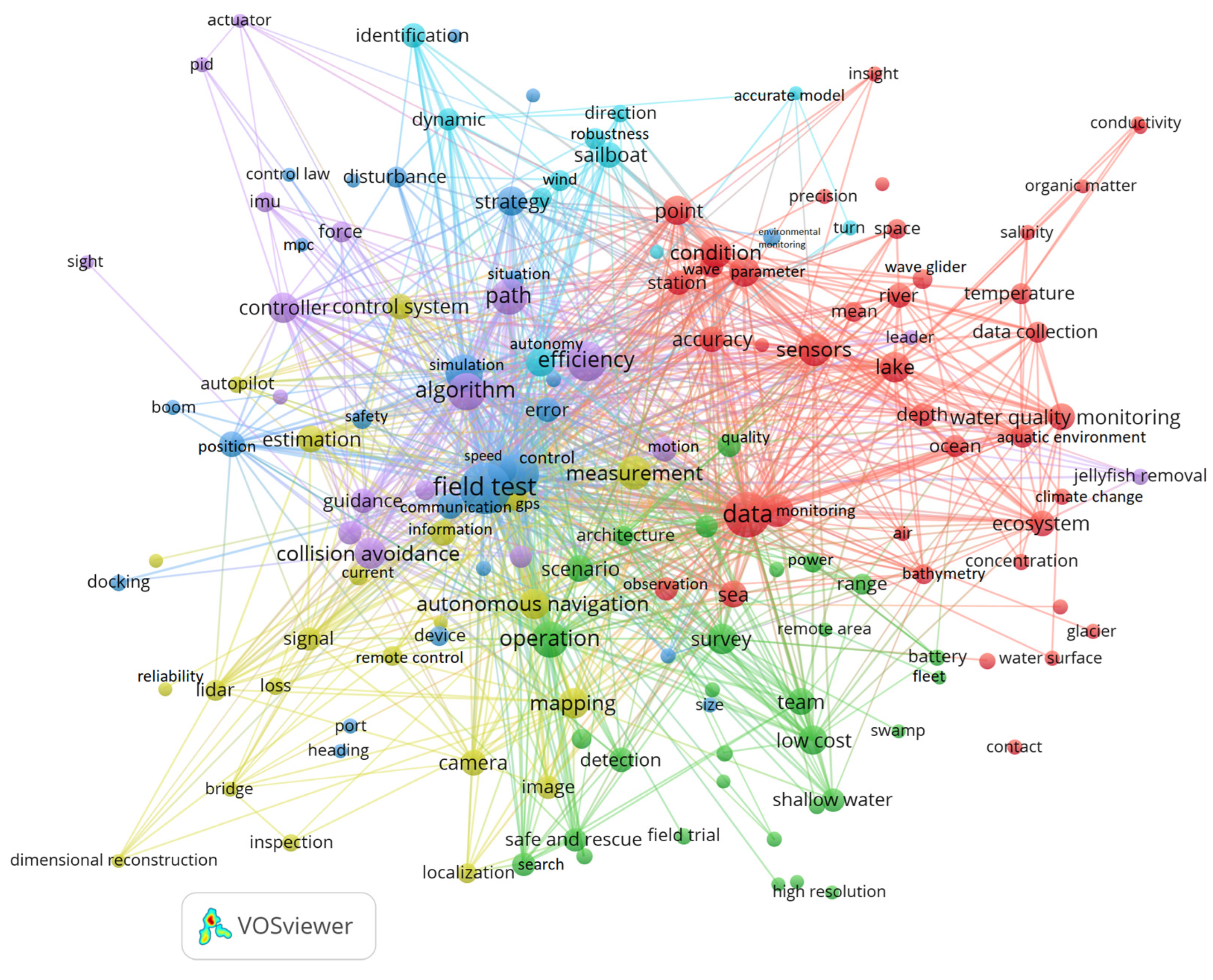
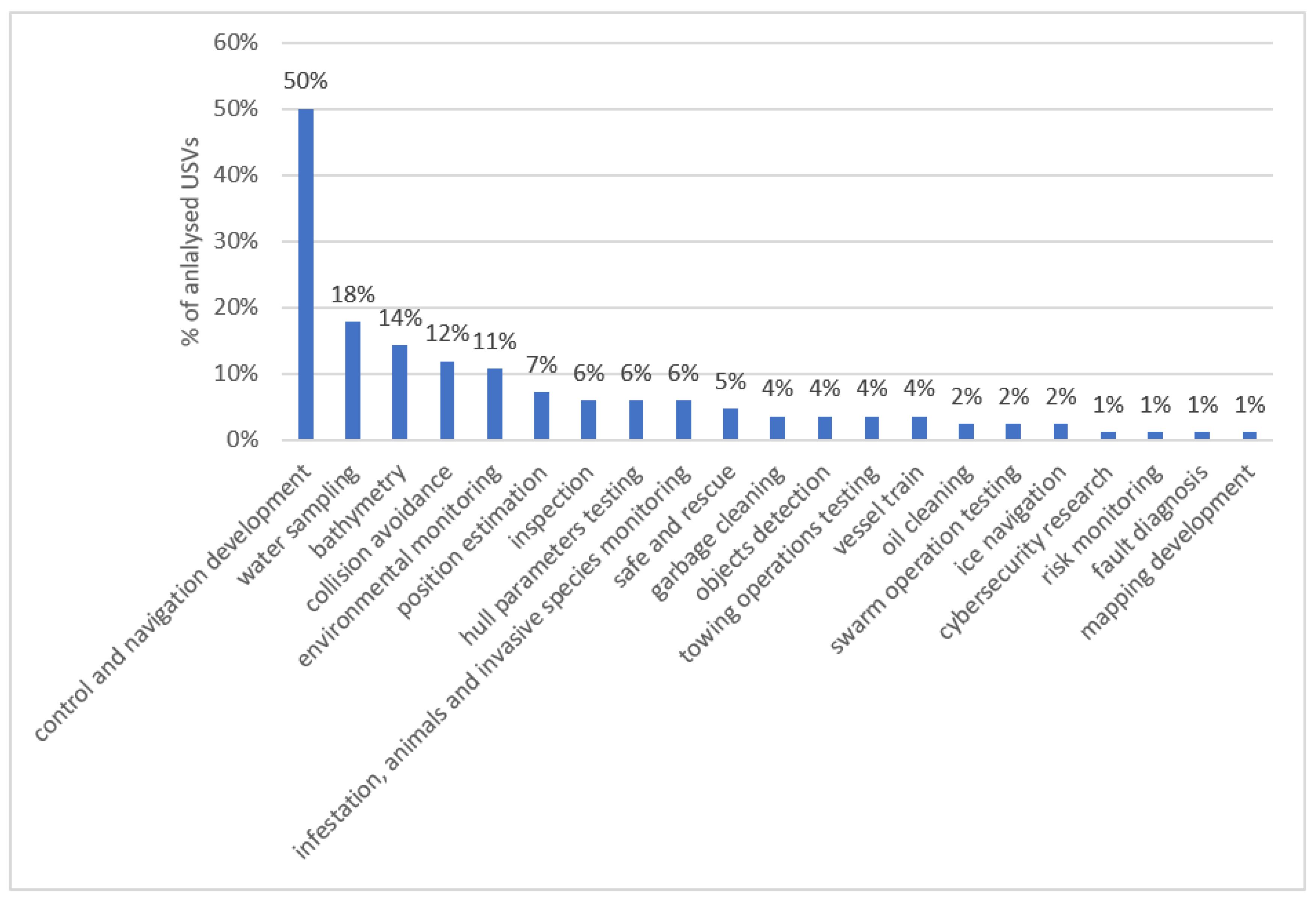
3.2. RQ2: Very Small USV Identified Use
3.3. RQ3: The Current Use of Very Small USVs for Safety and Cybersecurity Assurance
4. Potential Directions for Future Research in USVs Related to Safety
4.1. Very Small USVs for Safety Assurance of Control, Collision Avoidance and Navigation
4.2. Very Small USVs for the Safety Assurance of Sensory Systems
4.3. Very Small USVs for Hazard Identification and Risk Assessment
4.4. Very Small USVs for the Safety Assurance of Connectivity Systems and Cybersecurity
4.5. Very Small USVs for Search and Rescue Disaster Relief Operations
5. Study Limitations
6. Conclusions
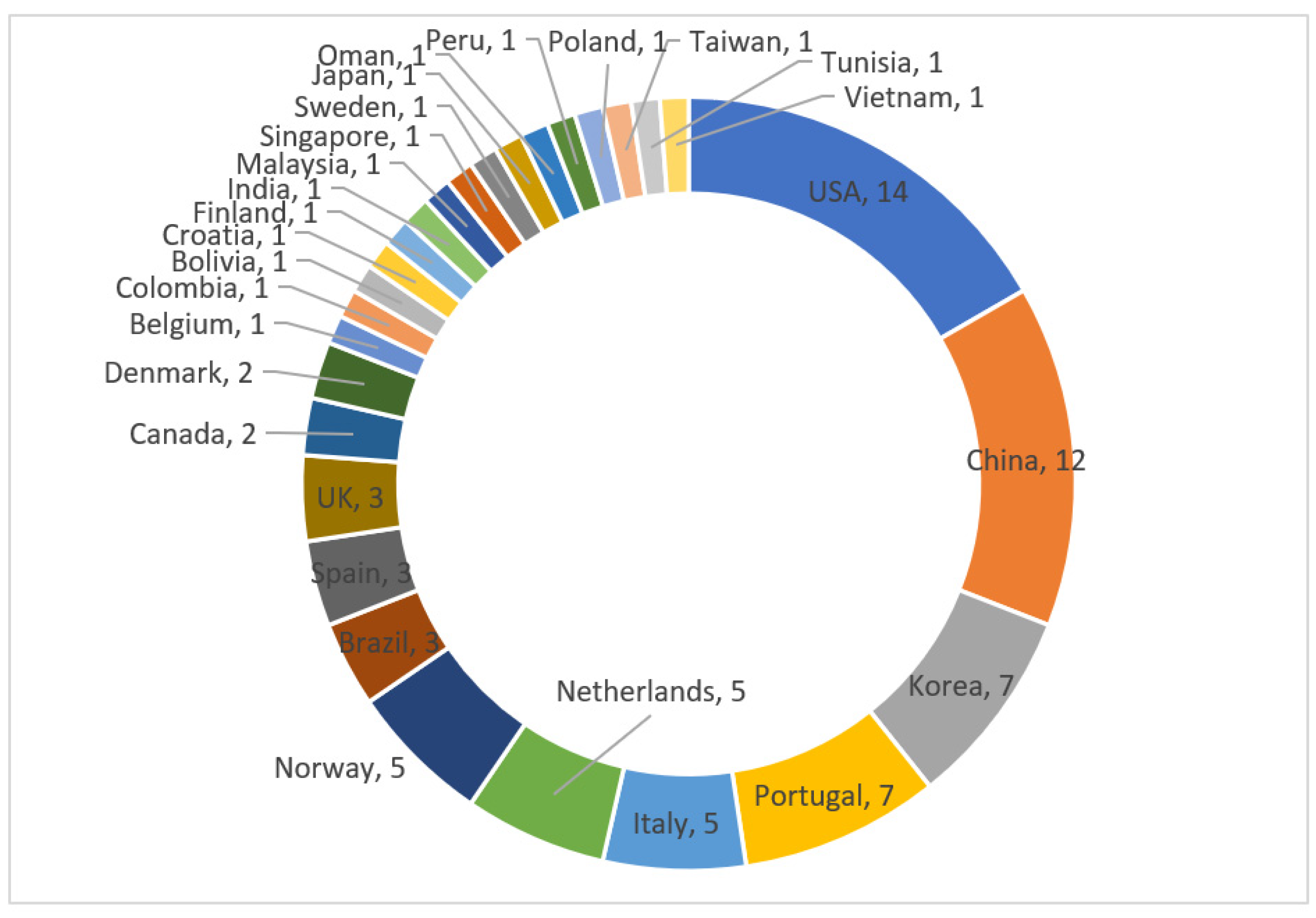
- Significant ongoing research into very small USVs (those with a displacement of less than 100 kg) is taking place in countries such as the USA, China, South Korea, Portugal, Italy and The Netherlands.
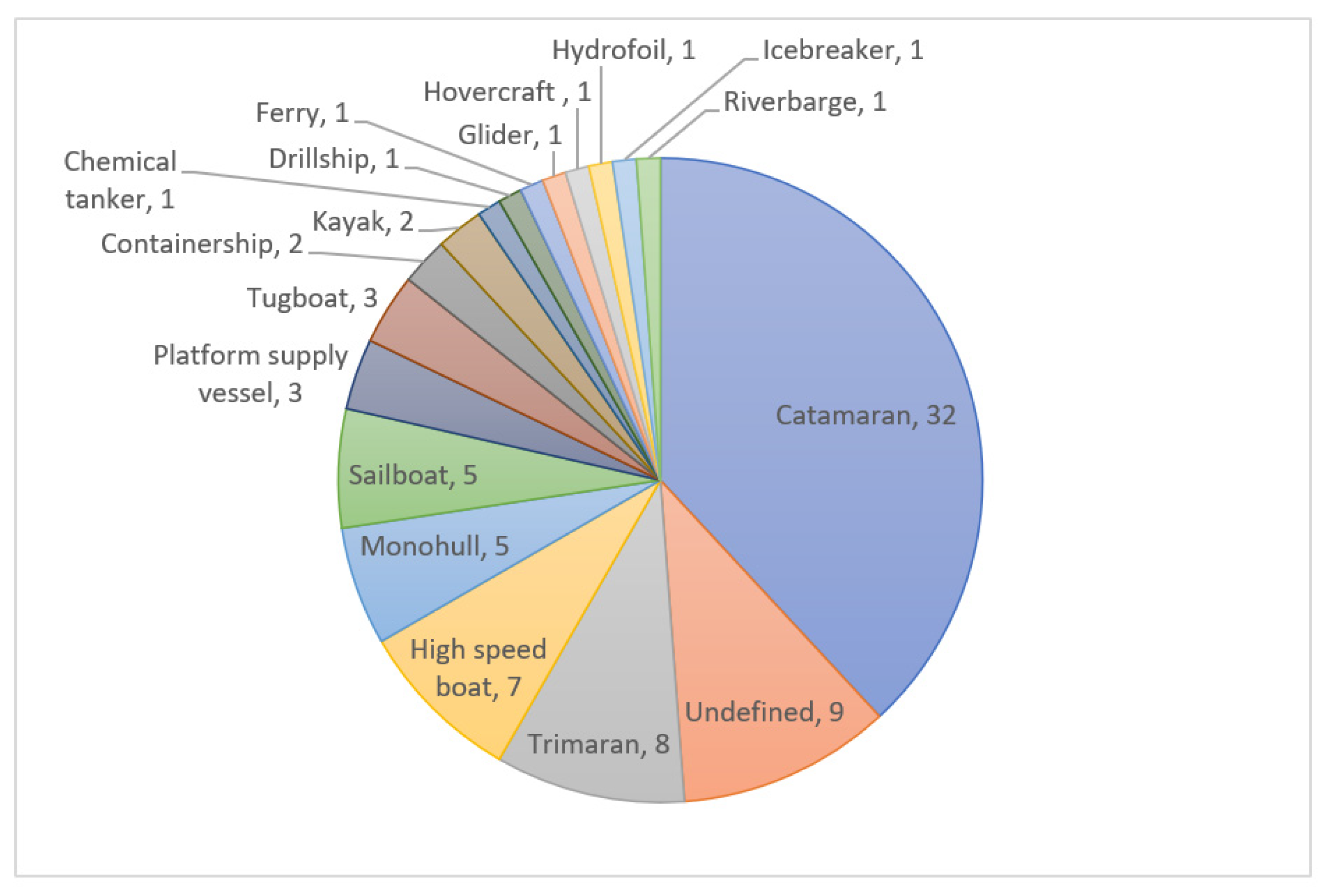
- Catamaran and trimaran hulls have gained popularity among the very small USV applications.
- GNSS-based navigation seems to be the predominant option for the positioning of very small USVs, although cameras and LiDARs are also used.
- Small USVs use has been largely confined to the development of navigation and control techniques. However, other applications include water sampling and analysis, bathymetry use and the testing of collision avoidance techniques and environmental monitoring.
- The research on very small USVs seems somewhat detached from research on safety and cybersecurity assurance, with no leading experts overlapping with the two areas, although there are indications of connections between these areas.
- Very small USVs offer a valuable platform for testing and demonstrating the safety and reliability of various algorithms, including those related to positioning, navigation, collision avoidance, leader-following, detection, recognition, fault tolerance, and risk monitoring. However, when applying these algorithms to larger ships, it is essential to consider similitude factors related to hydrodynamics, ice conditions, collision avoidance, hardware and software.
- Very small USVs can serve as platforms for collecting navigational data and object detection/recognition data, thus reducing uncertainty in assessing risks associated with navigation.
- Furthermore, very small USVs can play a role in assessing the impact of different attack scenarios on navigational systems, but not in a vulnerability assessment due to different hardware/software. Small USV use may be able to contribute to the development of novel communication protocols, prototype defense systems against cyberattacks, and the evaluation of communication link performance in both shore and remote areas, such as the Arctic.
- Additionally, small USVs may have applications in search and rescue operations in remote regions, potentially reducing response times and enhancing emergency response capabilities.
Author Contributions
Funding
Conflicts of Interest
Appendix A. Table Including Investigated Small USVs
| a/a | Model Name | Year First Mentioned | Owner | Country | Type and Size (Length × Beam, Displacement) | Sensory, Software and Propulsion Systems | Utility | Operational Area | RN | Ref |
| 1 | Hendrik | 2019 | KU Leuven | Belgium | River barge 154 cm × 20 cm 32 kg | Raspberry Pi, Navio2, Gyro, LiDAR, GPS, ROS | -Control algorithm development -Model testing | River | 2 | [42,171] |
| 2 | Yellowfish | 2022 | Universidad Loyola | Bolivia | Catamaran 24 kg | Raspberry Pi, Navio2 (GPS, IMU, Radio) Ardupilot | -Testing of estimators -Estimation of state dynamics | Lake | 2 | [33,193] |
| 3 | 2013 | Instituto Tecnológico de Aeronáutica | Brazil | Catamaran 120 cm × 120 cm | GPS, thrusters, IMU, digital compasses | -Position algorithms improvement | Lake | 2 | [194,195] | |
| 4 | AERO4River | 2021 | Federal University of Juiz de Fora | Brazil | Catamaran 140 cm 20 cm 20.8 kg | Aerial thrusters and servos, GPS, PID control, | -Control algorithms development, inspections, sensors placement, ship parameters identification | River | 5 | [148,152,196,197,198] |
| 5 | N-Boat | 2016 | Federal University of Rio Grande do Norte | Brazil | Sailboat 0.9m | WiFi, GPS, Wind sensor | -Control development using various techniques and their testing, water monitoring | Lake | 5 | [150,199,200,201,202] |
| 6 | 2021 | St John’s University | Canada | Platform supply vessel | Cameras, IMU, propellers, bow and aft thrusters | -Development of ice navigation techniques | Ice towing tank | 2 | [37,151] | |
| 7 | Eddy | 2021 | York University | Canada | Trimaran | GPS RTK, cameras, IMU, ROS, sonar sensor | -Infestation and invasive species monitoring | Lakes | 1 | [203] |
| 8 | WS-USV | 2014 | Shenyang Institute of Automation | China | Monohull 260 cm × 80 cm 70 kg | Rudder with propeller, GNSS, freeway radio | -Water sampling -Detection system development through images -Model parameters identification | Lakes and rivers | 4 | [44,175,176,177] |
| 9 | Zhi Long N1 | 2022 | Dalian Maritime University | China | Trimaran 175 cm × 50 cm 40 kg | Double propeller and rudder, GPS with RTK, LiDAR, Cameras, ROS C++ | -SLAM and positioning improvement | Harbor area | 2 | [204,205] |
| 10 | Pallas | 2020 | Wuhan University of Technology | China | Inland container vessel 100 cm | GPS, IMU, ROS | -Collision avoidance testing | River | 2 | [42,206] |
| 11 | AquaSentinel | 2023 | Ocean Alpha | China | Trimaran hull design 165 cm × 70 cm, 42 kg | Side scan sonars, echo sounders, Doppler sensors, radar sensors, cameras, communication system, waterjets | -Hydrographic survey -Inspections -Bathymetry survey -River velocity survey | Harbor areas/sheltered areas | 1 | [207] |
| 12 | Qiuxin No.5 | 2023 | Wuhan University of Technology | China | Tugboat 227 cm × 65 cm | GPS, gyro | -Controller optimization and tuning | River | 1 | [208] |
| 13 | 2022 | Shanghai Jiao Tong University | China | Catamaran 200 cm × 119 cm 120 kg | GPS RTK, wave radar, 2 thrusters, ROS | -Testing control techniques -Testing of follow the leader algorithm (vessel train) | River | 1 | [209] | |
| 14 | Hong Dong 1 | 2023 | Shanghai Jiao Tong University | China | 150 cm × 74 cm | IMU, GPS, LiDAR | -Testing ship detection using LiDAR | Swimming pool | 1 | [143] |
| 15 | 2020 | Guangzhou Institute of Technology | China | Catamaran 80 cm × 180 cm 5 kg | ARM microcontroller, satellite communication, photovoltaic, WiFi, water quality analysis device, gyroscope, magnetometer, GPS | -Water quality monitoring | Lake | 1 | [210] | |
| 16 | USBV I-II | 2010 | State Oceanic Administration | China | Catamaran 280 cm × 150 cm 100–130 kg | DGPS, IMU, Compass, echo sounder, camera, weather station, propellers | -Bathymetry Testing of controllers Sensors testing | Coastal area | 4 | [211,212,213,214] |
| 17 | 2009 | Shanghai Maritime University | China | Catamaran 270 cm × 148 cm 100 kg | Two propellers, LAN, NMEA, cameras, GPS | -Surveillance, quality sampling, hydrological survey, search and rescue | Coastal area | 1 | [132] | |
| 18 | USCV | 2020 | Guangxi University | China | Catamaran 133 cm × 95 cm 50 kg | Remote control system | -Garbage cleaning, system development | Harbors, rivers | 1 | [215] |
| 19 | 2021 | Zhejiang University of Water Resources and Electric Power | China | Undefined | GPS, LiDAR, Camera, WiFi, IMU, ROS, radio communication, thrusters | -Garbage cleaning, system development, autonomous navigation development | Harbor, rivers | 1 | [146] | |
| 20 | 2016 | Universidad Tecnologica de Bolivar | Colombia | Monohull 130 cm 17 kg | Raspberry Pi, GPS, IMU, radio, Matlab, simulinki, Navio+ | -Control testing, environment monitoring | lakes | 2 | [216,217] | |
| 21 | PlaDyPos/PlaDyBath | 2015 | University of Zagreb | Croatia | New type 35 cm × 35 cm 25 kg | GPS, Doppler speed sensor, compass, IMU | -Control development and verification -Scanning the sea bed -Bathymetry | Lakes, sea | 4 | [140,218,219,220] |
| 22 | ARCAB | 2019 | Aarhus University | Denmark | Trimaran 80 cm × 100 cm | GNSS receivers, FPV camera LabVIEW | -Assessment of climate change impact -Collection of surface water samples in hazardous area | Sea, close to melting icebergs | 1 | [122] |
| 23 | NORDACC | 2023 | Aarhus University | Denmark | Trimaran 93 cm× ? | GNSS receivers, FPV camera LabVIEW | -Assessment of climate change impact -Collection of surface water samples in hazardous area | Marine bay, melting iceberg | 1 | [123] |
| 24 | AL | 2023 | Aalto University | Finland | Icebreaker 135 cm × 38 cm 20 kg | LiDAR, GPS, IMU, WiFi, RP4, Arduino Mega, 3 Azimuth thrusters | Research | Ice and wave towing tank | 1 | [147] |
| 25 | ROSS | 2007 | National Institute of Oceanography | India | 184 cm × 36 cm 108 kg | RF, GPS, 2 BLDC motors | Ocean remote sensing | Open ocean | 1 | [221] |
| 26 | BAICal | 2022 | LASA, University of Calabria | Italy | Four buoys connected together 10 kg | GPS with RTK, Azimuth thrusters, IMU, Raspberry Pi, Python, ROS | -Collection of environmental data -Remote web application testing -Navigation system development -Fault diagnosis and control development | Lake, close to sea shore | 1 | [45] |
| 27 | SWAMP | 2020 | University of Genova | Italy | Catamaran 123 cm × 110 cm 58 kg | IMU, GPS, WiFi, Arduino, Raspberry Pi | -Monitoring close to glaciers -Water sampling -Bathymetry -Landing/take off platform -Power management development | Shallow water operations | 4 | [155,222,223,224] |
| 28 | MicroVega | 2015 | University “Parthenope” Napoli | Italy | Catamaran 135 cm × 85 cm 14 kg | SONAR, IMU, GPS, 2 motors, camera, underwater camera, Linux, Arduino, RTK, WiFi, Tritech StarFish and TrackStar, Arduino Mega, Raspberry Pi, C++ | -Bathymetric data acquisition, collision avoidance testing | Lakes, close to coast | 4 | [225,226,227,228] |
| 29 | Shark USSV | 2016 | Institute for coastal marine environment | Italy | Undefined 90 cm × 75 cm 40 kg | Four propellers Linux, GPS, AHRS, WiFi, camera, C++ | -Water sampling in proximity to glaciers Towing operations | Glaciers | 2 | [134,229] |
| 30 | WeMo | 2020 | University of Siena | Italy | Undefined 12.7 kg | Arduino Uno, GPS, sonar, pH, oxidation-reduction, salinity, oxygen, flow rate, sonar, sensors | -Environmental monitoring, navigation control | River | 2 | [230,231] |
| 31 | 2019 | Tokai University | Japan | Catamaran 88 cm × 35 cm | Very little information | -Position estimation, collision avoidance, garbage recognition, position detection algorithm development and testing | Pool | 1 | [232] | |
| 32 | 2014 | KAIST | Korea | Trimaran 2.8 m × 1.5 m 80 kg | LiDAR, cameras, GPS, WLAN, PC modules, trolling thruster system | -Development of navigation and mapping algorithms -Testing of geophysical navigation | Lake | 3 | [142,233,234] | |
| 33 | Orange-Duck | 2019 | KAIST | Korea | Trimaran 180 cm × 90 cm 60 kg | IMU, GPS, 2D LiDAR, 3D LiDAR, heading reference system, | -New positioning system development | Close to offshore structures | 1 | [235] |
| 34 | JEROS | 2012 | KAIST | Korea | Catamaran150 cm × 110 cm 50 kg | GPS, IMU, 2 thrusters, cameras | -Jellyfish removal -Path planning algorithm testing -Formation following algorithm, jellyfish detection | Coastal area | 5 | [236,237,238,239,240] |
| 35 | 2016 | KAIST | Korea | Catamaran 100 cm × 25 cm | Propeller, rudder, camera, GPS, IMU, LiDAR | -Bridge inspection | Rivers, lake | 1 | [241] | |
| 36 | 2022 | Inha University | Korea | Catamaran 144 cm × 77 cm | GPS, Arduino, ROS, Python, LiDAR, Raspberry Pi | -Collision avoidance development | Towing tank | 1 | [38] | |
| 37 | PASS Mk II | 2023 | Pukyong National University | Korea | Catamaran 120 cm × 60 cm 15 kg | GPS with RTK, IMU, Raspberry Pi, Arduino, Azipods | -Control algorithms development and testing | Towing tank | 1 | [34] |
| 38 | 2023 | Pukyong National University | Korea | Monohull 200 cm × 49 cm | Uknown | -Testing of control algorithm with gain tuning using free running test data | Lake | 1 | [242] | |
| 39 | 2016 | IIUM | Malaysia | Catamaran 100 cm × 92 cm | ArduPilot, telemetry, GPS, compass, sonar sensor | -Bathymetry | Lake | 1 | [138] | |
| 40 | UNIGE | 2020 | TuDelft | The Netherlands | Tugboat 97 cm × 30 cm | -IMU, GPS, ultrasonic sensors, azimuth thrusters | -Ship control algorithm development -Collision avoidance testing | Towing tank | 1 | [42] |
| 41 | Tito-Neri | 2020 | TuDelft | The Netherlands | Tugboat 145 cm 16.9 kg | Accelerometers, distance measurement sensors, gyro, GPS, encoders, camera, ROS, Python, Arduino | -Ship control algorithm development -Testing of follow-the-leader algorithm (vessel train) -Testing towing operations | Towing tank, lakes, rivers | 5 | [42,144,243,244,245] |
| 42 | Grey Seabax | 2021 | TuDelft | The Netherlands | Offshore ship 175 cm 19 kg | Accelerometers, distance measurement sensors, gyro, GPS, encoders, camera, ROS, Python, Arduino | -Ship control algorithm development | Towing tank | 1 | [243] |
| 43 | Delfa 1 | 2021 | TuDelft | The Netherlands | Catamaran 5 kg | Gyro, GPS, Cameras | -Ship control algorithm development | Towing tank | 1 | [243] |
| 44 | Roboat | 2018 | Roboat | The Netherlands | Urban Ferry 90 cm × 45 cm 9 kg | ROS, RTK GPS, IMU, LiDAR | -Navigation system design -Testing of control techniques -Testing of leader-follower algorithm | Port | 3 | [246,247,248] |
| 45 | Otter | 2021 | Marine Robotics | Norway | Catamaran 200 cm × 108 cm | GNSS, IMU, Stereo cameras, WiMax radio, LiDAR | -Control algorithms development and testing -Position, speed algorithms improvement and testing -Visual based algorithms -Injecting cyberattack scenarios to navigation system -Development of encryption algorithms -Online risk monitoring testing | Harbor | 8 | [35,39,145,149,153,157,158,249] |
| 46 | CSAD | 2017 | MClab | Norway | Drillship 258 cm × 44 cm | Arduino, IMU, WiFi bridge, Qualisys, LabVIEW | -Hydrodynamic experiments -Wave parameters estimation | Towing tank | 2 | [250,251] |
| 47 | SailBuoy | 2014 | MET Norway | Norway | Monohull 2 m 60 kg | Satellite communications, GPS, Temperature, Oxygen sensor | -Sea water monitoring | Gulf of Mexico | 1 | [252] |
| 48 | 2016 | NTNU | Norway | High speed boat | Thrusters, dynamic positioning, GPS, IMU, Linux, Arduino, temperature, pressure, humidity sensors | Inspection of aquafarms, control development | Close to aqua farms | 1 | [253] | |
| 49 | Cybership II | 2004 | NTNU | Norway | Supply ship 125 cm × 29 cm 24 kg | LabVIEW, WLAN | -Ship parameters identification - Formation maneuvering testing | 3 | [144,254,255] | |
| 50 | 2019 | Sultan Qaboos University | Oman | Catamaran 90 cm 15 kg | Raspberry Pi, ROS, GPS, IMU, cameras, oil sampling mechanism | -Navigational algorithm for oil spill response | Sea | 1 | [141] | |
| 51 | 2017 | Pontificia Universidad Catolica del Peru San Miguel | Peru | Catamaran 130 cm × 90 cm 50 kg | GPS, WiFi, bathymeter, sampling device, IMU, Raspberry Pi 3, camera, radio | -Bathymetry, task allocation algorithms testing | Lake | 2 | [256,257] | |
| 52 | 2017 | Gdynia Maritime University | Poland | Catamaran (dimensions unknown but seemingly small) | Echosounder, GPS RTK, 2 propellers, Pixhawk, ATmega8 | -Hydrographic survey | Lakes, sea | 2 | [139,258] | |
| 53 | ROAZ | 2013 | INESC TEC | Portugal | High speed boat 90 kg | WiFi communication, GPS RTK, IMU | -Search and rescue operations -Positioning algorithm testing | Coastal area | 4 | [125,126,127,128] |
| 54 | 2021 | CENTEC | Portugal | Containership 324 cm × 43 cm 108 kg | LabView, GPS, IMU, rudder, propeller | -Model parameters estimation -Collision avoidance testing with other ships | Lake | 2 | [259,260] | |
| 55 | 2021 | CENTEC | Portugal | Chemical tanker 258 cm × 43 cm | LabView, GPS, IMU, rudder, propeller, WiFi, wind sensor | -Model parameters estimation -Shallow water effect investigation -Collision avoidance testing -Collision avoidance testing with other ships | Tank | 3 | [32,260,261] | |
| 56 | Zarco | 2007 | University of Porto | Portugal | Catamaran, sailboat 150 cm 50 kg | WiFi, GPS, Compass, C++, Linux | -Research, underwater surveys, station keeping algorithms development, wind propulsion testing, bathymetry data, sonar technology development | Rivers | 8 | [129,262,263,264,265,266,267,268] |
| 57 | FEUP (FASt) | 2008 | University of Porto | Portugal | Sailboat 250 cm × 67 cm 50 kg | Linux, WiFi, modems, wind vane, anemometer, radiocommunications, compass, GPS, inclinometers, voltage, light temperature, moisture sensors, ANSI Solar panels | -Ocean observation, coastal surveillance, reconfiguration testing, speed controller testing, navigation controller testing | Coastal area | 6 | [156,165,269,270,271,272] |
| 58 | UCAP | 2013 | University of Porto | Portugal | Monohull (high speed) 90 kg | WiFi, GPS, IMU, PID controllers, | -Search and rescue operations | Coastal area | 1 | [125] |
| 59 | 2018 | Instituto de Telecomunicações | Portugal | High speed boat | ROS, Linux, pH, water temperature, salinity, depth, turbidity, conductivity sensors, IMU, GPS, Camera, Raspberry Pi, 2 thrusters, Bluetooth | -Communication networks testing and development -Swarm algorithm development | Pond | 4 | [273,274,275,276] | |
| 60 | ELFIN | 2023 | Weston Robot | Singapore | Catamaran 100 cm × 75 cm | -Water sampling with remote or automatic control | Harbor | 1 | [277] | |
| 61 | A-Tirma G1 and G2 | 2014 | Instituto Universitario SIANI | Spain | Sailboat 1 m × 0.25 m 4.3 kg 2 m × 367 cm 42 kg | RF, GPS, Compass, Wind, Inclinometers, C++ | -Research, fish monitoring, design optimization | Coastal area | 5 | [278,279,280,281,282] |
| 62 | 2015 | Universidad Complutense de Madrid | Spain | Highspeed boat 0.8 m–1 m 3.4–3.9 kg | ARM microcontroller, GPS, radio link, compass, C++ | -Towing operation testing, navigational control, oil cleaning operations, buoys deployment operations | Lake | 4 | [283,284,285,286] | |
| 63 | 2021 | Universidad Complutense de Madrid | Spain | Catamaran 10 kg | Radio link, GPS, IMU, compass, temperature, pH, conductivity | -Water monitoring | Lake | 1 | [135] | |
| 64 | Deep Vision | 2022 | KTH | Sweden | Catamaran (dimensions unknown, but small as judged from the pictures) | Wireless radio, IMU, GNSS RTK, sonar, Arduino mega, AIS | -Research | Close to coast | 1 | [287] |
| 65 | 2019 | National Sun Yet-san University | Taiwan | Kayak, 363 cm × 91 cm 88.5 kg | GPS, LiDAR, camera, Pixhawk, radio communication | -Autonomous sailing, remote communications, smart 3D mapping, real-time image detection and identification | Coastal area | 1 | [288] | |
| 66 | 2021 | Naval Academy | Tunisia | Monohull 314 cm 85 cm | Sonar, weather vane, anemometer, GPS, Video, IMU, siren, LiDAR, Arduino | -Control algorithm development | Coastal area | 2 | [289,290] | |
| 67 | 2006 | University of Wales | UK | Sailboat 1.5 m | GPS, compass, wind | -Research, monitoring, control techniques development | Lake | 3 | [291,292,293] | |
| 68 | 2018 | University of Leeds | UK | Trimaran 56 cm × 45 cm | GPS, remote control, sonar | -Bathymetry close to glaciers | Lakes | 1 | [294] | |
| 69 | 2017 | University of Bath | UK | Catamaran | Manual control, GPS, ROS, IMU, satellite communication, IMU, optical camera, sonars, Linux | -Bathymetry, navigation and guidance testing, objects detection | River | 1 | [295] | |
| 70 | Wave Glider | 2010 | Liquid Robotics | USA | Glider type Comparable to paddle board | Solar panel, battery, AIS, GPS, speed and customized sensors, gliding system | -Oceanographic research -Environmental monitoring (fish, tsunamis, met ocean, hydrocarbon) -Mammals and acoustic monitoring | Open ocean | 9 | [154,167,296,297,298,299,300,301,302] |
| 71 | sUSV | 2019 | University of Southern Mississippi | USA | Board 100 cm | ArduPilot, cameras, GPS | -Data collection platform at the coral reefs | Near coastline | 1 | [303] |
| 72 | Sea-RAI | 2009 | University of South Florida | USA | Catamaran 190 cm × 120 cm | Acoustic cameras, GPSs, video cameras | -Inspection in the aftermath of hurricanes | Rivers | 2 | [130,131] |
| 73 | BathyBoat | 2010 | University of Michigan | USA | High speed boat 97 cm 16 kg | GPS, IMU, Sonar, rudder, radio communication | -Bathymetry and fish finding | Lakes | 1 | [121] |
| 74 | AutoCat | 2000 | Massachusetts Institute of Technology | USA | Catamaran 180 cm × 130 cm | Two motors, two Astroflight motor controllers | -Research | Rivers | 1 | [304] |
| 75 | 2020 | Washington State University | USA | Hydrofoil monohull and Trimaran 61 cm × 16.5 cm 65 cm × 41 cm | Cameras, GPS, radios, CAN bus, Arduino Mega | -Research | Lake | 1 | [305] | |
| 76 | SCOUT | 2005 | Massachusetts Institute of Technology | USA | Kayak 3 m 82 kg | GPS, compass, WiFi, RF modem | -Research -Sampling platform | Coastal area | 2 | [306,307] |
| 77 | Smart Emily (Emily) | 2013 | Texas A&M University | USA | Board, 10 kg | GPS, remote control, android application | -Search and rescue operations | Coastal area | 2 | [47,133] |
| 78 | CRW | 2012 | Carnegie Mellon University | USA | 40-70 cm | WiFi, 3G, Arduino mega, sonars, fluorometer, gyro, camera, IMU, GPS | -Water quality monitoring, depth buoy verification, flood disaster mitigation -Collision avoidance testing using smartphones -Fleet control development | Lakes, canals | 3 | [308,309,310] |
| 79 | MARV | 2016 | Santa Clara University | USA | Catamaran, 106 cm × 60 cm 25 kg | WiFi, GPS, Sonar | -Research | Lakes, ponds | 1 | [311] |
| 80 | USNA sailboat | 2010 | United States Naval Academy | USA | Sailboat 2 m × 0.3 m 30 kg | WiFi, GPS, Compass, Wind | -Competition, navigation, power management, collision avoidance development | Coastal area | 3 | [312,313,314] |
| 81 | Kingfisher | 2016 | Clear Path Robotics | USA | Catamaran 135 cm × 98 cm 28 kg | Linux, WiFi, GPS, remote control, 2 thrusters, vacuum system, flow rate calculator, water sampling sensors | -Water sampling | Lakes | 3 | [137,166,315] |
| 82 | 2009 | USA | Catamaran 2 m × 1 m 100 kg | Temperature, salinity, conductivity, salinity, turbidity, solar panels, wireless communication | -Water sampling | River | 2 | [316,317] | ||
| 83 | SMARTBoat 5 | 2019 | SMART Lab | USA | Hovercraft 104 cm × 99 cm | ROS, camera, GPS, IMU, duct fans | -Cleaning from garbage | River lake | 1 | [136] |
| 84 | VIAM-USV2000 | 2021 | Ho Chi Minh City University of Technology | Vietnam | Catamaran Seemingly small | ROS, GPS, LiDAR, WiFi, C++ | -Path following, obstacle avoidance | Lake | 2 | [318,319] |
References
- Negenborn, R.R.; Goerlandt, F.; Johansen, T.A.; Slaets, P.; Valdez Banda, O.A.; Vanelslander, T.; Ventikos, N.P. Autonomous ships are on the horizon: Here’s what we need to know. Nature 2023, 615, 30–33. [Google Scholar] [CrossRef] [PubMed]
- Yara. MV Yara Birkeland. Available online: https://www.yara.com/news-and-media/media-library/press-kits/ (accessed on 6 December 2023).
- Rolls-Royce. AAWA Project Introduces the Project’s First Commercial Ship Operators. Available online: https://www.rolls-royce.com/media/press-releases.aspx (accessed on 6 December 2023).
- Bolbot, V.; Theotokatos, G.; Boulougouris, E.; Wennersberg, L.; Nordahl, H.; Rødseth, Ø.J.; Faivre, J.; Colella, M.M. Paving the way toward autonomous shipping development for European Waters–The AUTOSHIP project. In Proceedings of the Autonomous Ships, London, UK, 17–18 June 2020. [Google Scholar]
- Mayflower 400. It’s Time for the Mayflower Autonomous Ship. Available online: https://mas400.com/ (accessed on 11 September 2023).
- Choi, J.-H.; Jang, J.-Y.; Woo, J. A Review of Autonomous Tugboat Operations for Efficient and Safe Ship Berthing. J. Mar. Sci. Eng. 2023, 11, 1155. [Google Scholar] [CrossRef]
- Chaal, M.; Ren, X.; BahooToroody, A.; Basnet, S.; Bolbot, V.; Banda, O.A.V.; Van Gelder, P. Research on risk, safety, and reliability of autonomous ships: A bibliometric review. Saf. Sci. 2023, 167, 106256. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, D.; Han, B.; Wan, C. Risk and reliability analysis for maritime autonomous surface ship: A bibliometric review of literature from 2015 to 2022. Accid. Anal. Prev. 2023, 187, 107090. [Google Scholar] [CrossRef] [PubMed]
- De Vos, J.; Hekkenberg, R.G.; Banda, O.A.V. The impact of autonomous ships on safety at sea—A statistical analysis. Reliab. Eng. Syst. Saf. 2021, 210, 107558. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Rødseth, Ø.; Burmeister, H.-C. New Ship Designs for Autonomous Vessels; MUNIN Project: Hamburg, Germany, 2015; p. 36. [Google Scholar]
- Kim, T.-E.; Sharma, A.; Gausdal, A.H.; Chae, C.-J. Impact of automation technology on gender parity in maritime industry. WMU J. Marit. Aff. 2019, 18, 579–593. [Google Scholar] [CrossRef]
- Bergström, M. Autonomous in the Arctic—Fortune or Folly? Available online: https://library.e.abb.com/public/01f503f932c14752a3d3ed133db4a4f9/58-61.pdf (accessed on 22 September 2023).
- Lee, S.-W.; Jo, J.; Kim, S. Leveraging the 4th Industrial Revolution Technology for Sustainable Development of the Northern Sea Route (NSR)—The Case Study of Autonomous Vessel. Sustainability 2021, 13, 8211. [Google Scholar] [CrossRef]
- Bolbot, V.; Kulkarni, K.; Brunou, P.; Banda, O.V.; Musharraf, M. Developments and research directions in maritime cybersecurity: A systematic literature review and bibliometric analysis. Int. J. Crit. Infrastruct. Prot. 2022, 39, 100571. [Google Scholar] [CrossRef]
- Pedersen, T.A.; Glomsrud, J.A.; Ruud, E.-L.; Simonsen, A.; Sandrib, J.; Eriksen, B.-O.H. Towards simulation-based verification of autonomous navigation systems. Saf. Sci. 2020, 129, 104799. [Google Scholar] [CrossRef]
- Yang, X.; Utne, I.B.; Sandøy, S.S.; Ramos, M.A.; Rokseth, B. A systems-theoretic approach to hazard identification of marine systems with dynamic autonomy. Ocean. Eng. 2020, 217, 107930. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; Van Gelder, P. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Lee, P.; Theotokatos, G.; Boulougouris, E.; Bolbot, V. Risk-informed collision avoidance system design for maritime autonomous surface ships. Ocean. Eng. 2023, 279, 113750. [Google Scholar] [CrossRef]
- Bolbot, V.; Gkerekos, C.; Theotokatos, G.; Boulougouris, E. Automatic traffic scenarios generation for autonomous ships collision avoidance system testing. Ocean. Eng. 2022, 254, 111309. [Google Scholar] [CrossRef]
- Torben, T.R.; Glomsrud, J.A.; Pedersen, T.A.; Utne, I.B.; Sørensen, A.J. Automatic simulation-based testing of autonomous ships using Gaussian processes and temporal logic. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2022, 237, 293–313. [Google Scholar] [CrossRef]
- INCOSE. Systems Engineering Handbook: A Guide for System Life Cycle Processes and Activities, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Stoumpos, S.; Bolbot, V.; Theotokatos, G.; Boulougouris, E. Safety performance assessment of a marine dual fuel engine by integrating failure mode, effects and criticality analysis with simulation tools. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2022, 236, 376–393. [Google Scholar] [CrossRef]
- Guo, S.; Bolbot, V.; BahooToroody, A.; Banda, O.A.V.; Siow, C.L. Identification of hazardous encounter scenarios using AIS data for collision avoidance system testing. In Proceedings of the Advances in the Collision and Grounding of Ships and Offshore Structures, Nantes, France, 11–13 September 2023; pp. 43–50. [Google Scholar]
- Brown, D.K. The Way of a Ship in the Midst of the Sea: The Life and Work of William Froude; Periscope Publishing Ltd.: Pittsburgh, PA, USA, 2006. [Google Scholar]
- Kashteljan, V. Ice Resistance to Motion of a Ship; Sudostroenie: Leningrad, Russia, 1968. [Google Scholar]
- MEPC, R. 2013 Guidelines for Calculation of Reference Lines for Use with the Energy Efficiency Design Index (EEDI). Annex 14. 2013. Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/MEPCDocuments/MEPC.231(65).pdf (accessed on 22 September 2023).
- ITTC. ITTC Quality System Manual—Recommended Procedures and Guidelines. 7.6-01-01. ITTC: Zürich, Switzerland, 2021. [Google Scholar]
- ITTC. Recommended Procedures and Guidelines. Procedure, Test Methods for Model Ice Properties. 7.5-02-04-02. 2014; ITTC: Zürich, Switzerland.
- ITTC. Recommended Procedures and Guidelines. General Guideline and Introduction to Ice Model Testing. 7.5-02-04-01. 2021; ITTC: Zürich, Switzerland.
- ITTC. Recommended Procedures and Guidelines. Procedure, Resistance Tests in Ice. 7.5-02-04-02.1. 2017; ITTC: Zürich, Switzerland.
- Xu, H.; Hinostroza, M.A.; Soares, C.G. Modified Vector Field Path-Following Control System for an underactuated Autonomous surface ship model in the presence of static obstacles. J. Mar. Sci. Eng. 2021, 9, 652. [Google Scholar] [CrossRef]
- Morel, T.A.; Manzano, J.M.; Bejarano, G.; Orihuela Espina, D.L. Modelling and Identification of an Autonomous Surface Vehicle: Technical Report. 2022. Available online: https://repositorio.uloyola.es/handle/20.500.12412/3270 (accessed on 22 September 2023).
- Kim, S.-R.; Jo, H.-J.; Kim, J.-H.; Park, J.-Y. Development of an autonomous docking system for autonomous surface vehicles based on symbol recognition. Ocean. Eng. 2023, 283, 114753. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Global path planning and waypoint following for heterogeneous unmanned surface vehicles assisting inland water monitoring. J. Ocean. Eng. Sci. 2023; in press. [Google Scholar] [CrossRef]
- Li, S.; Xu, C.; Liu, J.; Han, B. Data-driven docking control of autonomous double-ended ferries based on iterative learning model predictive control. Ocean. Eng. 2023, 273, 113994. [Google Scholar] [CrossRef]
- Murrant, K.; Gash, R.; Mills, J. Dynamic Path Following in Ice-covered Waters with an Autonomous Surface Ship Model. In Proceedings of the OCEANS 2021, San Diego, CA, USA, 20–23 September 2021; pp. 1–4. [Google Scholar]
- Kim, J.-S.; Lee, D.-H.; Kim, D.-W.; Park, H.; Paik, K.-J.; Kim, S. A numerical and experimental study on the obstacle collision avoidance system using a 2D LiDAR sensor for an autonomous surface vehicle. Ocean. Eng. 2022, 257, 111508. [Google Scholar] [CrossRef]
- Volden, Ø.; Stahl, A.; Fossen, T.I. Development and Experimental Validation of Visual-Inertial Navigation for Auto-Docking of Unmanned Surface Vehicles. IEEE Access, 2023; in press. [Google Scholar] [CrossRef]
- Perera, L.; Moreira, L.; Santos, F.; Ferrari, V.; Sutulo, S.; Soares, C.G. A navigation and control platform for real-time manoeuvring of autonomous ship models. IFAC Proc. Vol. 2012, 45, 465–470. [Google Scholar] [CrossRef]
- Shen, H.; Wen, G.; Lv, Y. Collaborative Parameter Estimation of Multiple Unmanned Surface Vessels: A Robust Distributed Estimator-Based Approach. IEEE Trans. Ind. Inform. 2023; in press. [Google Scholar] [CrossRef]
- Singh, Y.; Slaets, P.; Afzal, M.R. The collaborative autonomous shipping experiment (case): Motivations, theory, infrastructure, and experimental challenges. In Proceedings of the The International Ship Control Systems Symposium, Delft, The Netherlands, 6–8 October 2020. [Google Scholar]
- Goudey, C.A.; Consi, T.; Manley, J.E.; Graham, M.M. A robotic boat for autonomous fish tracking. Mar. Technol. Society. Mar. Technol. Soc. J. 1998, 32, 47. [Google Scholar]
- Zhang, M.; Li, D.; Xiong, J.; He, Y. Multi-dimensional water sampling unmanned surface vehicle development and application. Int. J. Dyn. Control. 2023, 11, 3188–3208. [Google Scholar] [CrossRef]
- D’Angelo, V.; Folino, P.; Lupia, M.; Gagliardi, G.; Cario, G.; Gaccio, F.C.; Casavola, A. A ROS-Based GNC Architecture for Autonomous Surface Vehicle Based on a New Multimission Management Paradigm. Drones 2022, 6, 382. [Google Scholar] [CrossRef]
- Ten Hoven, D.; Friedhoff, B.; Roettig, F.; Lachmeyer, A.; Lutz, A. Deliverable 3.5 Demonstrator Results. 2021. Available online: https://novimar.eu/wp-content/uploads/2021/07/NOVIMAR_D3.5_Demonstrator_results_v6_final_version.pdf (accessed on 22 September 2023).
- Patterson, M.C.L.; Mulligan, A.; Boiteux, F. Safety and security applications for micro-unmanned surface vessels. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–6. [Google Scholar]
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–4. [Google Scholar]
- Bertram, V. Unmanned Surface Vehicles—A Survey; Skibsteknisk Selskab: Copenhagen, Denmark, 2008; Volume 1, pp. 1–14. [Google Scholar]
- Corfield, S.; Young, J. Unmanned surface vehicles-game changing technology for naval operations. IEEE Control. Eng. Ser. 2006, 69, 311. [Google Scholar] [CrossRef]
- Martin, A.Y. Unmanned maritime vehicles: Technology evolution and implications. Mar. Technol. Soc. J. 2013, 47, 72–83. [Google Scholar] [CrossRef]
- Yan, R.-j.; Pang, S.; Sun, H.-b.; Pang, Y.-j. Development and missions of unmanned surface vehicle. J. Mar. Sci. Appl. 2010, 9, 451–457. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control. 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Bai, X.; Li, B.; Xu, X.; Xiao, Y. A Review of Current Research and Advances in Unmanned Surface Vehicles. J. Mar. Sci. Appl. 2022, 21, 47–58. [Google Scholar] [CrossRef]
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on autonomous surface vessels: Part II-categorization of 60 prototypes and future applications. In Proceedings of the Computational Logistics: 8th International Conference, ICCL 2017, Southampton, UK, 18–20 October 2017; Proceedings 8. pp. 234–252. [Google Scholar]
- Jorge, V.A.; Granada, R.; Maidana, R.G.; Jurak, D.A.; Heck, G.; Negreiros, A.P.; Dos Santos, D.H.; Gonçalves, L.M.; Amory, A.M. A survey on unmanned surface vehicles for disaster robotics: Main challenges and directions. Sensors 2019, 19, 702. [Google Scholar] [CrossRef] [PubMed]
- Patterson, R.G.; Lawson, E.; Udyawer, V.; Brassington, G.B.; Groom, R.A.; Campbell, H.A. Uncrewed Surface Vessel Technological Diffusion Depends on Cross-Sectoral Investment in Open-Ocean Archetypes: A Systematic Review of USV Applications and Drivers. Front. Mar. Sci. 2022, 8, 736984. [Google Scholar] [CrossRef]
- Real-Arce, D.A.; Barrera, C.; Hernández, J.; Llinás, O. Ocean surface vehicles for maritime security applications (The PERSEUS project). In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–4. [Google Scholar]
- Graham, M.M. Unmanned Surface Vehicles: An Operational Commander’s Tool for Maritime Security; Naval War Coll Newport, Ri Joint Military Operations Dept: Newport, RI, USA, 2008. [Google Scholar]
- Rowley, J. Autonomous unmanned surface vehicles (usv): A paradigm shift for harbor security and underwater bathymetric imaging. In Proceedings of the OCEANS 2018 MTS/IEEE, Charleston, SC, USA, 22–25 October 2018; pp. 1–6. [Google Scholar]
- Motwani, A. A Survey of Uninhabited Surface Vehicles; Marine and Industrial Dynamic Analysis School of Marine Science and Engineering, Plymouth University: Plymouth, UK, 2012. [Google Scholar]
- OpenAI. Can You Refer to Small USVs Examples? Available online: https://chat.openai.com/c/70722e93-a867-4590-a945-06e00be6b2be (accessed on 1 October 2023).
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. J. Clin. Epidemiol. 2009, 62, e1–e34. [Google Scholar] [CrossRef] [PubMed]
- VOSviewer. VOSviewer Visualizing Scientific Landscapes. Available online: https://www.vosviewer.com/ (accessed on 1 February 2022).
- Bolbot, V.; Theotokatos, G.; Bujorianu, L.M.; Boulougouris, E.; Vassalos, D. Vulnerabilities and safety assurance methods in Cyber-Physical Systems: A comprehensive review. Reliab. Eng. Syst. Saf. 2019, 182, 179–193. [Google Scholar] [CrossRef]
- L3HARRIS. C-WORKER 7 Autonomous Surface Vehicle (ASV). Available online: https://www.l3harris.com/sites/default/files/2022-10/ims-maritime-C-Worker-7-Sell-Sheet.pdf (accessed on 15 October 2023).
- ECA Group. INSPECTOR 125/USV/Unmanned Surface Vehicle. Available online: https://www.ecagroup.com/en/solutions/unmanned-surface-vehicle-inspector-125?gclid=CjwKCAjwjaWoBhAmEiwAXz8DBeLjxCq2GnV16FLl2Nbw5jP9HaXlf6vLm2CzdRKh_cNQTZd31nD4GRoCRXYQAvD_BwE (accessed on 19 September 2023).
- Verge, T. The US Navy’s New Autonomous Warship Is called the Sea Hunter. Available online: https://www.theverge.com/2016/4/8/11391840/us-navy-autonomous-ship-sea-hunter-christened (accessed on 19 September 2023).
- AutoNaut. Wave Propelled USVs. Available online: https://www.autonautusv.com/vessels-0 (accessed on 19 September 2023).
- Szelangiewicz, T.; Żelazny, K.; Antosik, A.; Szelangiewicz, M. Application of Measurement Sensors and Navigation Devices in Experimental Research of the Computer System for the Control of an Unmanned Ship Model. Sensors 2021, 21, 1312. [Google Scholar] [CrossRef]
- Weston Robot. Unmanned Surface Vessel SMURF. Available online: https://www.westonrobot.com/unmanned-surface-vessel-SMURF (accessed on 3 September 2023).
- Ziegwied, A.T.; Dobbin, V.; Dyer, S.; Pierpoint, C.; Sidorovskaia, N. Using autonomous surface vehicles for Passive Acoustic Monitoring (PAM). In Proceedings of the OCEANS 2016 MTS/IEEE, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar]
- Siddle, E.; Heywood, K.J.; Webber, B.G.; Bromley, P. First measurements of ocean and atmosphere in the T ropical N orth A tlantic using C aravela, a novel uncrewed surface vessel. Weather 2021, 76, 200–204. [Google Scholar] [CrossRef]
- Sutton, A.J.; Williams, N.L.; Tilbrook, B. Constraining Southern Ocean CO2 flux uncertainty using uncrewed surface vehicle observations. Geophys. Res. Lett. 2021, 48, e2020GL091748. [Google Scholar] [CrossRef]
- Ferreira, H.; Martins, R.; Marques, E.; Pinto, J.; Martins, A.; Almeida, J.M.; Sousa, J.; Silva, E. Swordfish: An autonomous surface vehicle for network centric operations. In Proceedings of the Oceans 2007-Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Zhang, Y.; Rueda, C.; Kieft, B.; Ryan, J.P.; Wahl, C.; O’Reilly, T.C.; Maughan, T.; Chavez, F.P. Autonomous tracking of an oceanic thermal front by a Wave Glider. J. Field Robot. 2019, 36, 940–954. [Google Scholar] [CrossRef]
- Norgren, P.; Ludvigsen, M.; Ingebretsen, T.; Hovstein, V.E. Tracking and remote monitoring of an autonomous underwater vehicle using an unmanned surface vehicle in the Trondheim fjord. In Proceedings of the OCEANS 2015-MTS/IEEE, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Ferreira, H.; Almeida, C.; Martins, A.; Almeida, J.M.; Dias, N.; Dias, A.; Silva, E. Autonomous bathymetry for risk assessment with ROAZ robotic surface vehicle. In Proceedings of the Oceans 2009-Europe, Bremen, Germany, 11–14 May 2009; pp. 1–6. [Google Scholar]
- Zwolak, K.; Simpson, B.; Anderson, B.; Bazhenova, E.; Falconer, R.; Kearns, T.; Minami, H.; Roperez, J.; Rosedee, A.; Sade, H. An unmanned seafloor mapping system: The concept of an AUV integrated with the newly designed USV SEA-KIT. In Proceedings of the OCEANS 2017, Aberdeen, Scotland, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Johnston, P.; Poole, M. Marine surveillance capabilities of the AutoNaut wave-propelled unmanned surface vessel (USV). In Proceedings of the OCEANS 2017, Aberdeen, Scotland, 19–22 June 2017; pp. 1–46. [Google Scholar]
- Gentemann, C.; Scott, J.P.; Mazzini, P.L.; Pianca, C.; Akella, S.; Minnett, P.J.; Cornillon, P.; Fox-Kemper, B.; Cetinić, I.; Chin, T.M. Saildrone: Adaptively sampling the marine environment. Bull. Am. Meteorol. Soc. 2020, 101, E744–E762. [Google Scholar] [CrossRef]
- Breivik, M.; Hovstein, V.E.; Fossen, T.I. Straight-line target tracking for unmanned surface vehicles. Model. Identif. Control. (MIC) 2008, 29, 131–149. [Google Scholar] [CrossRef]
- Son, N.-S.; Park, H.S.; Pyo, C.S. On the sea trial test of the autonomous collision avoidance among multiple unmanned surface vehicles. In Proceedings of the OCEANS 2023, Limerick, Ireland, 5–8 June 2023; pp. 1–6. [Google Scholar]
- Chiodi, A.M.; Zhang, C.; Cokelet, E.D.; Yang, Q.; Mordy, C.W.; Gentemann, C.L.; Cross, J.N.; Lawrence-Slavas, N.; Meinig, C.; Steele, M. Exploring the Pacific Arctic seasonal ice zone with saildrone USVs. Front. Mar. Sci. 2021, 8, 640690. [Google Scholar] [CrossRef]
- Manley, J.E. Development of the autonomous surface craft “aces”. In Proceedings of the Oceans’ 97. MTS/IEEE Conference Proceedings, Halifax, NS, Canada, 6–9 October 1997; pp. 827–832. [Google Scholar]
- Ebken, J.; Bruch, M.; Lum, J. Applying unmanned ground vehicle technologies to unmanned surface vehicles. In Proceedings of the Unmanned Ground Vehicle Technology VII, Orlando, FL, USA, 29–31 March 2005; pp. 585–596. [Google Scholar]
- Yang, W.-R.; Chen, C.-Y.; Hsu, C.-M.; Tseng, C.-J.; Yang, W.-C. Multifunctional inshore survey platform with unmanned surface vehicles. Int. J. Autom. Smart Technol. 2011, 1, 19–25. [Google Scholar] [CrossRef]
- Naeem, W.; Xu, T.; Sutton, R.; Tiano, A. The design of a navigation, guidance, and control system for an unmanned surface vehicle for environmental monitoring. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2008, 222, 67–79. [Google Scholar] [CrossRef]
- Caccia, M.; Bibuli, M.; Bono, R.; Bruzzone, G.; Bruzzone, G.; Spirandelli, E. Unmanned surface vehicle for coastal and protected waters applications: The Charlie project. Mar. Technol. Soc. J. 2007, 41, 62–71. [Google Scholar] [CrossRef]
- Bibuli, M.; Caccia, M.; Lapierre, L.; Bruzzone, G. Guidance of unmanned surface vehicles: Experiments in vehicle following. IEEE Robot. Autom. Mag. 2012, 19, 92–102. [Google Scholar] [CrossRef]
- Pascoal, A.; Silvestre, C.; Oliveira, P. Vehicle and mission control of single and multiple autonomous marine robots. IEEE Control. Eng. Ser. 2006, 69, 353. [Google Scholar] [CrossRef]
- Martins, A.; Ferreira, H.; Almeida, C.; Silva, H.; Almeida, J.M.; Silva, E. Roaz and roaz ii autonomous surface vehicle design and implementation. In Proceedings of the International lifesaving congress, Matosinhos, Portugal, 27–29 September 2007. [Google Scholar]
- Majohr, J.; Buch, T. Modelling, Simulation and Control of an Autonomous Surface Marine Vehicle for Surveying Applications Measuring Dolphin MESSIN; IEE Control Engineering Series: London, UK, 2006; Volume 69, p. 329. [Google Scholar]
- Brekke, E.F.; Eide, E.; Eriksen, B.-O.H.; Wilthil, E.F.; Breivik, M.; Skjellaug, E.; Helgesen, Ø.K.; Lekkas, A.M.; Martinsen, A.B.; Thyri, E.H. milliAmpere: An autonomous ferry prototype. Proc. J. Phys. Conf. Ser. 2022, 2311, 012029. [Google Scholar] [CrossRef]
- Liu, T.; Liu, W. The USV of Spaceflight Xing Guang to the Olympic game with science and technology. Manag. Spacefl. Ind. 2008, 8, 46. [Google Scholar]
- Dunbabin, M.; Grinham, A. Experimental evaluation of an autonomous surface vehicle for water quality and greenhouse gas emission monitoring. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 5268–5274. [Google Scholar]
- Nicholson, D.P.; Michel, A.P.; Wankel, S.D.; Manganini, K.; Sugrue, R.A.; Sandwith, Z.O.; Monk, S.A. Rapid mapping of dissolved methane and carbon dioxide in coastal ecosystems using the ChemYak autonomous surface vehicle. Environ. Sci. Technol. 2018, 52, 13314–13324. [Google Scholar] [CrossRef] [PubMed]
- Leira, F.S.; Helgesen, H.H.; Johansen, T.A.; Fossen, T.I. Object detection, recognition, and tracking from UAVs using a thermal camera. J. Field Robot. 2021, 38, 242–267. [Google Scholar] [CrossRef]
- Peeters, G.; Catoor, T.; Afzal, M.R.; Kotze, M.; Geenen, P.; Van Baelen, S.; Vanierschot, M.; Boonen, R.; Slaets, P. Design and build of a scale model unmanned inland cargo vessel: Actuation and control architecture. In Proceedings of the Journal of Physics: Conference SeriesTrondheim, Trondheim, Norway, 13–14 November 2019; p. 012016. [Google Scholar]
- Brushane, F.; Jämsä, K.; Lafond, S.; Lilius, J. A Experimental Research Platform for Maritime Automation and Autonomous Surface Ship Applications. IFAC-PapersOnLine 2021, 54, 390–394. [Google Scholar] [CrossRef]
- Sauzé, C.; Neal, M.; Blanchard, T.; Miller, P. An Ice Strengthened Autonomous Surface Vessel for Surveying Marine-Terminating Calving Glaciers. J. Ocean. Technol. 2015, 10, 86–111. [Google Scholar]
- Bazilchuk, N. “Pamela” Makes Studying the Ocean Easy and Affordable. Available online: https://norwegianscitechnews.com/2022/07/pamela-makes-studying-the-ocean-easy-and-affordable/ (accessed on 3 September 2023).
- Aker Arctic. Autonomous Ship. Available online: https://akerarctic.fi/en/solution/autonomous-ship/ (accessed on 3 September 2023).
- Li, C.; Weeks, E.; Huang, W.; Milan, B.; Wu, R. Weather-induced transport through a tidal channel calibrated by an unmanned boat. J. Atmos. Ocean. Technol. 2018, 35, 261–279. [Google Scholar] [CrossRef]
- Bovcon, B.; Kristan, M. WaSR—A water segmentation and refinement maritime obstacle detection network. IEEE Trans. Cybern. 2021, 52, 12661–12674. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.; Xu, H.; Liu, Y. Robust small object detection on the water surface through fusion of camera and millimeter wave radar. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 15263–15272. [Google Scholar]
- Cheng, Y.; Zhu, J.; Jiang, M.; Fu, J.; Pang, C.; Wang, P.; Sankaran, K.; Onabola, O.; Liu, Y.; Liu, D. Flow: A dataset and benchmark for floating waste detection in inland waters. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 10953–10962. [Google Scholar]
- Mahacek, P. Dynamic analysis of a SWATH vessel. MBARI Internsh. Rep. 2005, 1–13. [Google Scholar]
- Bingham, B.; Kraus, N.; Howe, B.; Freitag, L.; Ball, K.; Koski, P.; Gallimore, E. Passive and active acoustics using an autonomous wave glider. J. Field Robot. 2012, 29, 911–923. [Google Scholar] [CrossRef]
- Furfaro, T.C.; Dusek, J.E.; von Ellenrieder, K.D. Design, construction, and initial testing of an autonomous surface vehicle for riverine and coastal reconnaissance. In Proceedings of the OCEANS, Online, 26–29 October 2009; pp. 1–6. [Google Scholar]
- Zhao, T.; Han, C.; Xu, Y. Application of unmanned surface vehicle in urban river water quality monitoring. China Water Wastewater 2021, 37, 7. [Google Scholar] [CrossRef]
- Frizzell-Makowski, L.; Shelsby, R.; Mann, J.; Scheidt, D. An autonomous energy harvesting station-keeping vehicle for persistent ocean surveillance. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–4. [Google Scholar]
- Pastore, T.; Djapic, V. Improving autonomy and control of autonomous surface vehicles in port protection and mine countermeasure scenarios. J. Field Robot. 2010, 27, 903–914. [Google Scholar] [CrossRef]
- Bremer, R.; Cleophas, P.; Fitski, H.; Keus, D. Unmanned Surface and Underwater Vehicles; DTIC Document; TNO Defence Security and Safety: Delft, The Netherlands, 2007. [Google Scholar]
- Murray, J. Sentry–An Unmanned Swimmer Intercept System; DTIC Document; QinetiQ North America Inc.: Waltham, MA, USA, 2008. [Google Scholar]
- Oleynikova, E.; Lee, N.B.; Barry, A.J.; Holler, J.; Barrett, D. Perimeter patrol on autonomous surface vehicles using marine radar. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–5. [Google Scholar]
- Vaneck, T.W.; RODRIGUEZ-ORTIZ, C.D.; Schmidt, M.C.; Manley, J.E. Automated bathymetry using an autonomous surface craft. Navigation 1996, 43, 407–419. [Google Scholar] [CrossRef]
- Roberts, G.N.; Sutton, R. Advances in Unmanned Marine Vehicles; IET: Roslyn Heights, NY, USA, 2006; Volume 69. [Google Scholar]
- Yakimenko, O.A.; Kragelund, S.P. Real-time optimal guidance and obstacle avoidance for UMVs. In Autonomous Underwater Vehicles; IntechOpen: London, UK, 2011; pp. 67–98. [Google Scholar] [CrossRef]
- Kulkarni, K.; Goerlandt, F.; Li, J.; Banda, O.V.; Kujala, P. Preventing shipping accidents: Past, present, and future of waterway risk management with Baltic Sea focus. Saf. Sci. 2020, 129, 104798. [Google Scholar] [CrossRef]
- Brown, H.C.; Jenkins, L.K.; Meadows, G.A.; Shuchman, R.A. BathyBoat: An autonomous surface vessel for stand-alone survey and underwater vehicle network supervision. Mar. Technol. Soc. J. 2010, 44, 20–29. [Google Scholar] [CrossRef]
- Carlson, D.F.; Fürsterling, A.; Vesterled, L.; Skovby, M.; Pedersen, S.S.; Melvad, C.; Rysgaard, S. An affordable and portable autonomous surface vehicle with obstacle avoidance for coastal ocean monitoring. HardwareX 2019, 5, e00059. [Google Scholar] [CrossRef]
- Carlson, D.F.; Akbulut, S.; Rasmussen, J.F.; Hestbech, C.S.; Andersen, M.H.; Melvad, C. Compact and modular autonomous surface vehicle for water research: The Naval Operating Research Drone Assessing Climate Change (NORDACC). HardwareX 2023, 15, e00453. [Google Scholar] [CrossRef] [PubMed]
- Meinig, C.; Lawrence-Slavas, N.; Jenkins, R.; Tabisola, H.M. The use of Saildrones to examine spring conditions in the Bering Sea: Vehicle specification and mission performance. In Proceedings of the OCEANS 2015-MTS/IEEE, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Matos, A.; Silva, E.; Cruz, N.A.; Alves, J.C.; Almeida, D.; Pinto, M.; Martins, A.; Almeida, J.M.; Machado, D. Development of an Unmanned Capsule for large-scale maritime search and rescue. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–8. [Google Scholar]
- Martins, A.; Dias, A.; Almeida, J.; Ferreira, H.; Almeida, C.; Amaral, G.; Machado, D.; Sousa, J.; Pereira, P.; Matos, A. Field experiments for marine casualty detection with autonomous surface vehicles. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 21–25 October 2013; pp. 1–5. [Google Scholar]
- Matias, B.; Oliveira, H.; Almeida, J.M.; Dias, A.; Ferreira, H.; Martins, A.; Silva, E. High-accuracy low-cost RTK-GPS for an unmannned surface vehicle. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–4. [Google Scholar]
- Matos, A.; Martins, A.; Dias, A.; Ferreira, B.; Almeida, J.M.; Ferreira, H.; Amaral, G.; Figueiredo, A.; Almeida, R.; Silva, F. Multiple robot operations for maritime search and rescue in euRathlon 2015 competition. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–7. [Google Scholar]
- Marques, M.M.; Martins, A.; Matos, A.; Cruz, N.A.; Almeida, J.M.; Alves, J.C.; Lobo, V.; Silva, E. REX 2014—Robotic Exercises 2014 multi-robot field trials. In Proceedings of the OCEANS 2015—MTS/IEEE, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Murphy, R.R.; Steimle, E.; Hall, M.; Lindemuth, M.; Trejo, D.; Hurlebaus, S.; Medina-Cetina, Z.; Slocum, D. Robot-assisted bridge inspection. J. Intell. Robot. Syst. 2011, 64, 77–95. [Google Scholar] [CrossRef]
- Steimle, E.T.; Murphy, R.R.; Lindemuth, M.; Hall, M.L. Unmanned marine vehicle use at Hurricanes Wilma and Ike. In Proceedings of the OCEANS, Biloxi, MI, USA, 26–29 October 2009; pp. 1–6. [Google Scholar]
- Wang, J.; Gu, W.; Zhu, J.; Zhang, J. An unmanned surface vehicle for multi-mission applications. In Proceedings of the 2009 International Conference on Electronic Computer Technology, Macau, China, 20–22 February 2009; pp. 358–361. [Google Scholar]
- Wilde, G.A.; Murphy, R.R. User Interface for Unmanned Surface Vehicles Used to Rescue Drowning Victims. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–8. [Google Scholar]
- Bruzzone, G.; Odetti, A.; Caccia, M.; Ferretti, R. Monitoring of Sea-Ice-Atmosphere Interface in the Proximity of Arctic Tidewater Glaciers: The Contribution of Marine Robotics. Remote Sens. 2020, 12, 1707. [Google Scholar] [CrossRef]
- Giron-Sierra, J.M.; Sombria, J.C. Application of teams of usvs for cyanobacteria monitoring: Initial steps. IFAC-PapersOnLine 2021, 54, 416–421. [Google Scholar] [CrossRef]
- Jo, W.; Park, J.-H.; Hoashi, Y.; Min, B.-C. Development of an Unmanned Surface Vehicle for Harmful Algae Removal. In Proceedings of the OCEANS 2019 MTS/IEEE, Seattle, DC, USA, 27–31 October 2019; pp. 1–7. [Google Scholar]
- Powers, C.W.; Predosa, R.; Higgins, C.; Schmale III, D.G. Mobile distributed temperature sensing of the air–water interface of an aquatic environment with an unmanned surface vehicle. J. Unmanned Veh. Syst. 2017, 6, 43–56. [Google Scholar] [CrossRef]
- Idris, M.H.B.M.; Kamarudin, M.A.A.B.C.; Sahalan, M.I.; Abidin, Z.B.Z.; Rashid, M.M. Design and development of an autonomous surface vessel for inland water depth monitoring. In Proceedings of the 2016 International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia, 26–27 July 2016; pp. 177–182. [Google Scholar]
- Makar, A.; Specht, C.; Specht, M.; Dąbrowski, P.; Szafran, M. Integrated Geodetic and Hydrographic Measurements of the Yacht Port for Nautical Charts and Dynamic Spatial Presentation. Geosciences 2020, 10, 203. [Google Scholar] [CrossRef]
- Vasilijević, A.; Nađ, Đ.; Mandić, F.; Mišković, N.; Vukić, Z. Coordinated navigation of surface and underwater marine robotic vehicles for ocean sampling and environmental monitoring. IEEE/ASME Trans. Mechatron. 2017, 22, 1174–1184. [Google Scholar] [CrossRef]
- Maawali, W.A.; Al Naabi, A.; Al Yaruubi, M.; Saleem, A.; Maashri, A.A. Design and Implementation of an Unmanned Surface Vehicle for Oil Spill Handling. In Proceedings of the 2019 1st International Conference on Unmanned Vehicle Systems-Oman (UVS), Muscat, Oman, 5–7 February 2019; pp. 1–6. [Google Scholar]
- Han, J.; Park, J.; Kim, T.; Kim, J. Precision navigation and mapping under bridges with an unmanned surface vehicle. Auton. Robot. 2015, 38, 349–362. [Google Scholar] [CrossRef]
- Wei, S.; Xiao, Y.; Yang, X.; Wang, H. Attitude Estimation Method for Target Ships Based on LiDAR Point Clouds via An Improved RANSAC. J. Mar. Sci. Eng. 2023, 11, 1755. [Google Scholar] [CrossRef]
- Du, Z.; Reppa, V.; Negenborn, R.R. MPC-based COLREGS Compliant Collision Avoidance for a Multi-Vessel Ship-Towing System. In Proceedings of the 2021 European Control Conference (ECC), Rotterdam, The Netherlands, 29 June–2 July 2021; pp. 1857–1862. [Google Scholar]
- Volden, Ø.; Stahl, A.; Fossen, T.I. Vision-based positioning system for auto-docking of unmanned surface vehicles (USVs). Int. J. Intell. Robot. Appl. 2022, 6, 86–103. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, Z.; Cai, W.; Yan, Q. Design of Low-cost Unmanned Surface Vessel for Water Surface Cleaning. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 2290–2293. [Google Scholar]
- Saarniniemi, T. Development of Hardware and Control in an Autonomous Ship Model; Aalto University: Helsinki, Finland, 2023. [Google Scholar]
- Neto, A.F.D.S.; Honório, L.D.M.; Da Silva, M.F.; Junior, I.C.D.S.; Westin, L.G.F. Development of Optimal Parameter Estimation Methodologies Applied to a 3DOF Autonomous Surface Vessel. IEEE Access 2021, 9, 50035–50049. [Google Scholar] [CrossRef]
- Fossen, S.; Fossen, T.I. Five-State Extended Kalman Filter for Estimation of Speed over Ground (SOG), Course over Ground (COG) and Course Rate of Unmanned Surface Vehicles (USVs): Experimental Results. Sensors 2021, 21, 7910. [Google Scholar] [CrossRef] [PubMed]
- Silva Junior, A.G.d.; Santos, D.H.d.; Negreiros, A.P.F.d.; Silva, J.M.V.B.d.S.; Gonçalves, L.M.G. High-Level Path Planning for an Autonomous Sailboat Robot Using Q-Learning. Sensors 2020, 20, 1550. [Google Scholar] [CrossRef]
- De Schaetzen, R.; Botros, A.; Gash, R.; Murrant, K.; Smith, S.L. Real-Time Navigation for Autonomous Surface Vehicles In Ice-Covered Waters. arXiv 2023, arXiv:2302.11601. [Google Scholar]
- Dos Santos, M.F.; Neto, A.F.D.S.; Honório, L.D.M.; Da Silva, M.F.; Mercorelli, P. Robust and Optimal Control Designed for Autonomous Surface Vessel Prototypes. IEEE Access 2023, 11, 9597–9612. [Google Scholar] [CrossRef]
- Utne, I.B. Risk-aware autonomous systems for safe and intelligent decision making. Plenary Sess. Talk 2023. [Google Scholar]
- Al Maawali, W.; Mesbah, M.; Al Maashri, A.; Saleem, A. Design of intelligent thruster decision-making system for USVs. Ocean. Eng. 2023, 285, 115431. [Google Scholar] [CrossRef]
- Bibuli, M.; Ferretti, R.; Odetti, A.; Cosso, T. River Survey Evolution by means of Autonomous Surface Vehicles. In Proceedings of the 2021 International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), Reggio Calabria, Italy, 4–6 October 2021; pp. 412–417. [Google Scholar]
- Cruz, N.A.; Alves, J.C. Ocean sampling and surveillance using autonomous sailboats. In Proceedings of the 1st International Robotic Sailing Conference, Guildford, UK, 4–6 September 2008. [Google Scholar]
- Solnør, P.; Volden, Ø.; Gryte, K.; Petrovic, S.; Fossen, T.I. Hijacking of unmanned surface vehicles: A demonstration of attacks and countermeasures in the field. J. Field Robot. 2022, 39, 631–649. [Google Scholar] [CrossRef]
- Volden, Ø.; Solnør, P.; Petrovic, S.; Fossen, T.I. Secure and efficient transmission of vision-based feedback control signals. J. Intell. Robot. Syst. 2021, 103, 26. [Google Scholar] [CrossRef]
- ITTC. Procedure and Guidelines—Propulsive Performance Prediction; ITTC: Tokyo, Japan, 2011. [Google Scholar]
- Gadd, G. Some Effects of Scale in Ship Model Testing; Universität Hamburg, Institut für Schiffbau: Hamburg, Germany, 1982. [Google Scholar]
- Matala, R.; Suominen, M. Scaling principles for model testing in old brash ice channel. Cold Reg. Sci. Technol. 2023, 210, 103857. [Google Scholar] [CrossRef]
- Politis. Ship Resistance and Propulsion; National Technical University of Athens: Athens, Greece, 2011. [Google Scholar]
- Chun, D.-H.; Roh, M.-I.; Lee, H.-W.; Ha, J.; Yu, D. Deep reinforcement learning-based collision avoidance for an autonomous ship. Ocean. Eng. 2021, 234, 109216. [Google Scholar] [CrossRef]
- Hound, N. Yara Birkeland Autonomous and Zero Emission Vessel Test Model Design Demonstrated. Available online: https://www.iims.org.uk/yara-birkeland-autonomous-zero-emission-vessel-test-model-design-demonstrated/ (accessed on 31 October 2023).
- Alves, J.C.; Cruz, N.A. FASt—An autonomous sailing platform for oceanographic missions. In Proceedings of the OCEANS 2008, Cardiff, UK, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Powers, C.W.; Hanlon, R.; Grothe, H.; Prussin, A.J.; Marr, L.C.; Schmale, D.G. Coordinated Sampling of Microorganisms Over Freshwater and Saltwater Environments Using an Unmanned Surface Vehicle (USV) and a Small Unmanned Aircraft System (sUAS). Front. Microbiol. 2018, 9, 1668. [Google Scholar] [CrossRef]
- Bittencourt, L.; Soares-Filho, W.; de Lima, I.M.S.; Pai, S.; Lailson-Brito, J., Jr.; Barreira, L.M.; Azevedo, A.F.; Guerra, L.A.A. Mapping cetacean sounds using a passive acoustic monitoring system towed by an autonomous Wave Glider in the Southwestern Atlantic Ocean. Deep. Sea Res. Part I Oceanogr. Res. Pap. 2018, 142, 58–68. [Google Scholar] [CrossRef]
- Bačkalov, I. Safety of autonomous inland vessels: An analysis of regulatory barriers in the present technical standards in Europe. Saf. Sci. 2020, 128, 104763. [Google Scholar] [CrossRef]
- Fossen, T.I.; Marine Control Systems–Guidance. Navigation, and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002; Org. Number NO 985 195 005 MVA; ISBN 8292356002. Available online: https://books.google.fi/books/about/Marine_Control_Systems.html?id=B3ZwQgAACAAJ&redir_esc=y (accessed on 6 December 2023).
- Hwang, T.; Youn, I.-H. Development of a Graph-Based Collision Risk Situation Model for Validation of Autonomous Ships’ Collision Avoidance Systems. J. Mar. Sci. Eng. 2023, 11, 2037. [Google Scholar] [CrossRef]
- Van Baelen, S.; Drijkoningen, S.; Moons, C.; Afzal, M.R.; Slaets, P. Experimental identification of the dynamic characteristics for a 1/25 scale model of the watertruck+ self-propelling barge. In Proceedings of the OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–7. [Google Scholar]
- Du, Z.; Negenborn, R.R.; Reppa, V. Review of floating object manipulation by autonomous multi-vessel systems. Annu. Rev. Control. 2022, 55, 255–278. [Google Scholar] [CrossRef]
- Stefani, A. An Introduction to Ship Automation and Control Systems; Institute of Marine Engineering, Science & Technology: London, UK, 2013. [Google Scholar]
- Bolbot, V.; Owen, D.; Chaal, M.; BahooToroody, A.; Bergström, M.; Rahikainen, M.; Banda, O.V. Investigation of Statutory and Class society Based Requirements for Electronic Lookout. In Proceedings of the European Conference on Safety and Reliability, Southampton, UK, 3–8 September 2023. [Google Scholar]
- Feng, T.; Xiong, J.; Xiao, J.; Liu, J.; He, Y. Real-time riverbank line detection for USV system. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 2546–2551. [Google Scholar]
- Xiong, J.; Li, D.; He, Y.; Gu, F.; Han, J. Active quasi-LPV modeling and identification for a Water-Jet Propulsion USV: An experimental study. IFAC-PapersOnLine 2015, 48, 1359–1364. [Google Scholar] [CrossRef]
- Xiong, J.; He, Y.; Gu, F.; Li, D.; Han, J. Quasi-lpv modeling and identification for a water-jet propulsion usv: An experimental study. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 431–436. [Google Scholar]
- Bolbot, V.T.G.; Wennersberg, L.A. A method to identify and rank objects and hazardous interactions affecting autonomous ships navigation. J. Navig. 2022, 75, 572–593. [Google Scholar] [CrossRef]
- Guo, C.; Haugen, S.; Utne, I.B. Risk assessment of collisions of an autonomous passenger ferry. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2023, 237, 425–435. [Google Scholar] [CrossRef]
- Maidana, R.G.; Kristensen, S.D.; Utne, I.B.; Sørensen, A.J. Risk-based path planning for preventing collisions and groundings of maritime autonomous surface ships. Ocean. Eng. 2023, 290, 116417. [Google Scholar] [CrossRef]
- Bolbot, V.; Theotokatos, G.; Hamann, R.; Psarros, G.; Boulougouris, E. Dynamic Blackout Probability Monitoring System for Cruise Ship Power Plants. Energies 2021, 14, 6598. [Google Scholar] [CrossRef]
- Basnet, S.; BahooToroody, A.; Bolbot, V.; Valdez Banda, O.A. Real-Time Risk Monitoring of Ship Pilotage Operations: Automating BN Risk Model Development. In Proceedings of the The 33rd European Safety and Reliability Conference (ESREL 2023), Southampton, UK, 3–8 September 2023. [Google Scholar]
- Fan, C.; Montewka, J.; Zhang, D. Towards a Framework of Operational-Risk Assessment for a Maritime Autonomous Surface Ship. Energies 2021, 14, 3879. [Google Scholar] [CrossRef]
- Rødseth, Ø.J.; Faivre, J.; Hjørungnes, S.R.; Andersen, P.; Bolbot, V.; Pauwelyn, A.-S.; Wennersberg, L.A. AUTOSHIP Deliverable D3.1 Autonomous Ship Design Standards. Revision 2.0. 2020. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5da3b7aa6&appId=PPGMS (accessed on 6 December 2023).
- Basnet, S.; BahooToroody, A.; Chaal, M.; Lahtinen, J.; Bolbot, V.; Banda, O.A.V. Risk analysis methodology using STPA-based Bayesian network-applied to remote pilotage operation. Ocean. Eng. 2023, 270, 113569. [Google Scholar] [CrossRef]
- IMO. Revised Guidelines for the Onboard Operational Use of Shipborne Automatic Identification Systems (AIS) Resolution A.1106; IMO: London, UK, 2015. [Google Scholar]
- Juhász, K.; Póser, V.; Kozlovszky, M.; Bánáti, A. WiFi vulnerability caused by SSID forgery in the IEEE 802.11 protocol. In Proceedings of the 2019 IEEE 17th World Symposium on Applied Machine Intelligence and Informatics (SAMI), Piscataway, NJ, USA, 24–26 January 2019; pp. 333–338. [Google Scholar]
- Amro, A.; Gkioulos, V.; Katsikas, S. Assessing cyber risk in cyber-physical systems using the ATT&CK framework. ACM Trans. Priv. Secur. 2023, 26, 1–33. [Google Scholar] [CrossRef]
- Ullah, M.A.; Yastrebova, A.; Mikhaylov, K.; Höyhtyä, M.; Alves, H. Situational awareness for autonomous ships in the arctic: mMTC direct-to-satellite connectivity. IEEE Commun. Mag. 2022, 60, 32–38. [Google Scholar] [CrossRef]
- Höyhtyä, M.; Huusko, J.; Kiviranta, M.; Solberg, K.; Rokka, J. Connectivity for autonomous ships: Architecture, use cases, and research challenges. In Proceedings of the 2017 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 18–20 October 2017; pp. 345–350. [Google Scholar]
- Zhang, Y.; Hou, J.; Yuan, Y. A Comprehensive Study of the Robustness for LiDAR-Based 3D Object Detectors Against Adversarial Attacks. Int. J. Comput. Vis. 2023, 1–33. [Google Scholar] [CrossRef]
- Yoo, J.; Goerlandt, F.; Chircop, A. Unmanned remotely operated search and rescue ships in the Canadian Arctic: Exploring the opportunities, risk dimensions and governance implications. In Governance of Arctic Shipping: Rethinking Risk, Human Impacts and Regulation; Springer: Berlin/Heidelberg, Germany, 2020; pp. 83–103. [Google Scholar]
- Morel, T.A.; Bejarano, G.; Manzano, J.M.; Orihuela, L. Experimental validation of robust non-linear state observers for autonomous surface vehicles equipped with position sensors. In Proceedings of the 2022 IEEE Conference on Control Technology and Applications (CCTA), Trieste, Italy, 23–25 August 2022; pp. 357–362. [Google Scholar]
- Dos Santos, D.S.; Nascimento, C.L.; Cunha, W.C. Autonomous navigation of a small boat using IMU/GPS/digital compass integration. In Proceedings of the 2013 IEEE International Systems Conference (SysCon), Orlando, FL, USA, 15–18 April 2013; pp. 468–474. [Google Scholar]
- Mattos, D.I.; Santos, D.S.d.; Nascimento, C.L. Development of a low-cost autonomous surface vehicle using MOOS-IvP. In Proceedings of the 2016 Annual IEEE Systems Conference (SysCon), Orlando, FL, USA, 18–21 April 2016; pp. 1–6. [Google Scholar]
- Da Silva, M.F.; Honório, L.D.M.; Dos Santos, M.F.; Neto, A.F.D.S.; Cruz, N.A.; Matos, A.; Westin, L.G.F. Project and Control Allocation of a 3 DoF Autonomous Surface Vessel With Aerial Azimuth Propulsion System. IEEE Access 2021, 9, 5212–5227. [Google Scholar] [CrossRef]
- Regina, B.A.; Honório, L.D.M.; Pancoti, A.A.N.; Silva, M.F.; Santos, M.F.; Lopes, V.M.L.; Neto, A.F.D.S.; Westin, L.G.F. Hull and Aerial Holonomic Propulsion System Design for Optimal Underwater Sensor Positioning in Autonomous Surface Vessels. Sensors 2021, 21, 571. [Google Scholar] [CrossRef] [PubMed]
- Souza, M.B.A.; Neto, A.F.D.S.; Honório, L.D.M.; de Oliveira, E.J.; Silva, M.F.; Pancoti, A. A Convolutional System Identification Approach Mixing Optimal Parameter Estimation and Deep Learning. Int. J. Control. Autom. Syst. 2023, 21, 2674–2684. [Google Scholar] [CrossRef]
- Santos, D.; Silva Junior, A.G.; Negreiros, A.; Vilas Boas, J.; Alvarez, J.; Araujo, A.; Aroca, R.V.; Gonçalves, L.M.G. Design and Implementation of a Control System for a Sailboat Robot. Robotics 2016, 5, 5. [Google Scholar] [CrossRef]
- Silva Junior, A.G.D.; Lima Sa, S.T.D.; Santos, D.H.D.; Negreiros, Á.P.F.D.; Souza Silva, J.M.V.B.D.; Álvarez Jácobo, J.E.; Garcia Gonçalves, L.M. Towards a Real-Time Embedded System for Water Monitoring Installed in a Robotic Sailboat. Sensors 2016, 16, 1226. [Google Scholar] [CrossRef]
- Boas, J.V.; Júnior, A.S.; Santos, D.; Negreiros, A.P.; Alvarez-Jácobo, J.; Gonçalves, L.M. Towards the electromechanical design of an autonomous robotic sailboat. In Proceedings of the 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Recife, Brazil, 8–12 October 2016; pp. 43–48. [Google Scholar]
- Santos, D.; Negreiros, A.; Jacobo, J.; Goncalves, L.; Junior, A.S.; Silva, J.M. Gain-scheduling pid low-level control for robotic sailboats. In Proceedings of the 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), João Pessoa, Brazil, 6–10 November 2018; pp. 147–152. [Google Scholar]
- Codd-Downey, R.; Jenkin, M.; Dey, B.B.; Zacher, J.; Blainey, E.; Andrews, P. Monitoring re-growth of invasive plants using an autonomous surface vessel. Front. Robot. AI 2021, 7, 583416. [Google Scholar] [CrossRef]
- Wang, H.; Yin, Y.; Jing, Q. Comparative Analysis of 3D LiDAR Scan-Matching Methods for State Estimation of Autonomous Surface Vessel. J. Mar. Sci. Eng. 2023, 11, 840. [Google Scholar] [CrossRef]
- Hu, B.; Liu, X.; Jing, Q.; Lyu, H.; Yin, Y. Estimation of berthing state of maritime autonomous surface ships based on 3D LiDAR. Ocean. Eng. 2022, 251, 111131. [Google Scholar] [CrossRef]
- You, X.; Ma, F.; Lu, S.; Liu, J.; Yan, X. An integrated platform for the development of autonomous and remote-control ships. In Proceedings of the 19th Conference on Computer and IT Applications in the Maritime Industries (COMPIT 2020), Pontignano, Italy, 17–19 August 2020; pp. 316–327. [Google Scholar]
- Oceanalpha. Small USV. Available online: https://www.oceanalpha.com/product-item/sl40/?gclid=CjwKCAjwjaWoBhAmEiwAXz8DBRcgHcjqRFBJMfHI9tk2IJiBQOFgdETKXm-kmtTTDqAevqPRGdPRQRoCQW4QAvD_BwE (accessed on 19 September 2023).
- You, X.; Li, S.; Liu, J.; Yan, X. Experimental research of the PID tune method for ship path following control. In Proceedings of the 33rd International Ocean and Polar Engineering Conference, Ottawa, ON, Canada, 19–23 June 2023. [Google Scholar]
- Du, B.; Lin, B.; Xie, W.; Zhang, W.; Negenborn, R.R.; Pang, Y. Flexible Collision-free Platooning Method for Unmanned Surface Vehicle with Experimental Validations. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 6854–6860. [Google Scholar]
- Cao, H.; Guo, Z.; Wang, S.; Cheng, H.; Zhan, C. Intelligent Wide-Area Water Quality Monitoring and Analysis System Exploiting Unmanned Surface Vehicles and Ensemble Learning. Water 2020, 12, 681. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, J.; Ma, Y.; Zhang, C.-Y. Derivation of Bathymetry from High-resolution Optical Satellite Imagery and USV Sounding Data. Mar. Geod. 2017, 40, 466–479. [Google Scholar] [CrossRef]
- Jin, J.; Zhang, J.; Liu, D. Design and Verification of Heading and Velocity Coupled Nonlinear Controller for Unmanned Surface Vehicle. Sensors 2018, 18, 3427. [Google Scholar] [CrossRef] [PubMed]
- Jin, J.; Zhang, J.; Shao, F. Modelling, manoeuvring analysis and course following for two unmanned surface vehicles driven by a single propeller and double propellers. In Proceedings of the The 27th Chinese Control and Decision Conference (2015 CCDC), Kyoto, Japan, 23–25 May 2015; pp. 4932–4937. [Google Scholar]
- Jin, J.; Zhang, J.; Shao, F.; Lv, Z.; Li, M.; Liu, L.; Zhang, P. Active and passive underwater acoustic applications using an unmanned surface vehicle. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–6. [Google Scholar]
- Luo, Y.; Ai, J.; Zheng, J.; Wang, J. Control system design and thrust analysis of an unmanned surface cleaning vessel with a novel pump-valve propulsion system. IEEE Access 2020, 8, 46356–46372. [Google Scholar] [CrossRef]
- Paez, J.; Villa, J.; Cabrera-Gámez, J.; Yime, E. Implementation of an unmanned surface vehicle for environmental monitoring applications. In Proceedings of the 2018 IEEE 2nd Colombian Conference on Robotics and Automation (CCRA), Barranquilla, Colombia, 1–3 November 2018; pp. 1–6. [Google Scholar]
- Villa, J.; Paez, J.; Quintero, C.; Yime, E.; Cabrera-Gámez, J. Design and control of an unmanned surface vehicle for environmental monitoring applications. In Proceedings of the 2016 IEEE Colombian Conference on Robotics and Automation (CCRA), Ningbo, China, 29–30 September 2016; pp. 1–5. [Google Scholar]
- Vasilijević, A.; Buxton, B.; Sharvit, J.; Stilinovic, N.; Nad, D.; Miskovic, N.; Planer, D.; Hale, J.; Vukic, Z. An ASV for coastal underwater archaeology: The Pladypos survey of Caesarea Maritima, Israel. In Proceedings of the OCEANS 2015-Genova, Genova, Italy, 18–21 May 2015; pp. 1–7. [Google Scholar]
- Kapetanović, N.; Vasilijević, A.; Nađ, Đ.; Zubčić, K.; Mišković, N. Marine robots mapping the present and the past: Unraveling the secrets of the deep. Remote Sens. 2020, 12, 3902. [Google Scholar] [CrossRef]
- Kapetanović, N.; Kordić, B.; Vasilijević, A.; Nađ, Đ.; Mišković, N. Autonomous Vehicles Mapping Plitvice Lakes National Park, Croatia. Remote Sens. 2020, 12, 3683. [Google Scholar] [CrossRef]
- Desa, E.; Maurya, P.K.; Pereira, A.; Pascoal, A.M.; Prabhudesai, R.; Mascarenhas, A.; Desa, E.; Madhan, R.; Matondkar, S.; Navelkar, G. A small autonomous surface vehicle for ocean color remote sensing. IEEE J. Ocean. Eng. 2007, 32, 353–364. [Google Scholar] [CrossRef]
- Ferretti, R.; Bibuli, M.; Bruzzone, G.; Odetti, A.; Aracri, S.; Motta, C.; Caccia, M.; Rovere, M.; Mercorella, A.; Madricardo, F.; et al. Acoustic seafloor mapping using non-standard ASV: Technical challenges and innovative solutions. In Proceedings of the OCEANS 2023, Limerick, Ireland, 5–8 June 2023; pp. 1–6. [Google Scholar]
- Boscaino, V.; Odetti, A.; Marsala, G.; Di Cara, D.; Panzavecchia, N.; Caccia, M.; Tinè, G. A fuel cell powered autonomous surface vehicle: The Eco-SWAMP project. Int. J. Hydrog. Energy 2021, 46, 20732–20749. [Google Scholar] [CrossRef]
- Odetti, A.; Bruzzone, G.; Altosole, M.; Viviani, M.; Caccia, M. SWAMP, an Autonomous Surface Vehicle expressly designed for extremely shallow waters. Ocean Eng. 2020, 216, 108205. [Google Scholar] [CrossRef]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. MicroVeGA (micro vessel for geodetics application): A marine drone for the acquisition of bathymetric data for GIS applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 123–130. [Google Scholar] [CrossRef]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating Sensors into a Marine Drone for Bathymetric 3D Surveys in Shallow Waters. Sensors 2016, 16, 41. [Google Scholar] [CrossRef]
- Mattei, G.; Troisi, S.; Aucelli, P.P.C.; Pappone, G.; Peluso, F.; Stefanile, M. Sensing the Submerged Landscape of Nisida Roman Harbour in the Gulf of Naples from Integrated Measurements on a USV. Water 2018, 10, 1686. [Google Scholar] [CrossRef]
- Pappone, G.; Aucelli, P.P.C.; Mattei, G.; Peluso, F.; Stefanile, M.; Carola, A. A Detailed Reconstruction of the Roman Landscape and the Submerged Archaeological Structure at “Castel dell’Ovo islet” (Naples, Southern Italy). Geosciences 2019, 9, 170. [Google Scholar] [CrossRef]
- Zappalà, G.; Bruzzone, G.; Caruso, G.; Azzaro, M. Development of an automatic sampler for extreme polar environments: First in situ application in Svalbard Islands. Rend. Lincei 2016, 27, 251–259. [Google Scholar] [CrossRef]
- Madeo, D.; Pozzebon, A.; Mocenni, C.; Bertoni, D. A low-cost unmanned surface vehicle for pervasive water quality monitoring. IEEE Trans. Instrum. Meas. 2020, 69, 1433–1444. [Google Scholar] [CrossRef]
- Garuglieri, S.; Madeo, D.; Pozzebon, A.; Zingone, R.; Mocenni, C.; Bertoni, D. An integrated system for real-time water monitoring based on low cost unmanned surface vehicles. In Proceedings of the 2019 IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11–13 March 2019; pp. 1–6. [Google Scholar]
- Harada, K.; Watanabe, K.; Utsunomiya, K.; Shimpo, M.; Dzeng, R.-J. Experimental study on collision avoidance procedures for plastic waste cleaner USV. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–6. [Google Scholar]
- Jung, J.; Park, J.; Choi, J.; Choi, H.-T. Navigation of unmanned surface vehicles using underwater geophysical sensing. IEEE Access 2020, 8, 208707–208717. [Google Scholar] [CrossRef]
- Han, J.; Park, J.; Kim, J. Three-dimensional reconstruction of bridge structures above the waterline with an unmanned surface vehicle. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2273–2278. [Google Scholar]
- Han, J.; Kim, J. Three-Dimensional Reconstruction of a Marine Floating Structure With an Unmanned Surface Vessel. IEEE J. Ocean. Eng. 2019, 44, 984–996. [Google Scholar] [CrossRef]
- Kim, D.; Shin, J.-U.; Kim, H.; Lee, D.; Lee, S.-M.; Myung, H. Development of jellyfish removal robot system JEROS. In Proceedings of the 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Daejeon, Republic of Korea, 26–28 November 2012; pp. 599–600. [Google Scholar]
- Kim, H.; Kim, D.; Kim, H.; Shin, J.-U.; Myung, H. An extended any-angle path planning algorithm for maintaining formation of multi-agent jellyfish elimination robot system. Int. J. Control. Autom. Syst. 2016, 14, 598–607. [Google Scholar] [CrossRef]
- Kim, D.; Shin, J.-U.; Kim, H.; Kim, H.; Myung, H. Formation Control Experiment of Autonomous Jellyfish Removal Robot System JEROS. In Proceedings of the Robot Intelligence Technology and Applications 2: Results from the 2nd International Conference on Robot Intelligence Technology and Applications, Beijing, China, 6–8 November 2014; pp. 463–471. [Google Scholar]
- Kim, D.; Shin, J.-u.; Kim, H.; Lee, D.; Lee, S.-M.; Myung, H. Experimental tests of autonomous jellyfish removal robot system JEROS. In Robot Intelligence Technology and Applications 2012, Proceedings of the An Edition of the Presented Papers from the 1st International Conference on Robot Intelligence Technology and Applications, Gwangju, Republic of Korea, 16–18 2012; MIT: Cambridge, MA, USA, 2013; pp. 395–403. [Google Scholar]
- Kim, D.; Kim, H.; Kim, H.; Shin, J.-U.; Myung, H.; Kim, Y.-G. Path planning for multi-agent jellyfish removal robot system jeros and experimental tests. In Distributed Autonomous Robotic Systems, Proceedings of the 12th International Symposium, Berlin, Germany, 17–19 August 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 299–310. [Google Scholar]
- Kim, K.; Hyun, J.; Choi, D.; Myung, H. Vertical thrusting unmanned surface vehicle for stable and close inspection of bridge structure. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Republic of Korea, 16–19 October 2016; pp. 1040–1042. [Google Scholar]
- Kim, J.-H.; Kim, S.-R.; Jo, H.-J.; Yeo, C.Y.; Yeo, D.J.; Yun, K.; Park, J.; Park, J.-Y. Development of automatic gain-tuning algorithm for heading control using free-running test data. Int. J. Nav. Archit. Ocean. Eng. 2023, 15, 100517. [Google Scholar] [CrossRef]
- Research Lab Autonomous Shipping. RAS Vessels, Sites and Experiments. Available online: https://rasdelft.nl/facilities-2/ (accessed on 3 September 2023).
- Haseltalab, A.; Negenborn, R.R. Model predictive maneuvering control and energy management for all-electric autonomous ships. Appl. Energy 2019, 251, 113308. [Google Scholar] [CrossRef]
- Piaggio, B.; Garofano, V.; Donnarumma, S.; Alessandri, A.; Negenborn, R.R.; Martelli, M. Follow-the-Leader Guidance, Navigation, and Control of Surface Vessels: Design and Experiments. IEEE J. Ocean. Eng. 2023, 48, 997–1008. [Google Scholar] [CrossRef]
- Pampus, M.J.v.; Haseltalab, A.; Garofano, V.; Reppa, V.; Deinema, Y.H.; Negenborn, R.R. Distributed Leader-Follower Formation Control for Autonomous Vessels based on Model Predictive Control. In Proceedings of the 2021 European Control Conference (ECC), Rotterdam, The Netherlands, 29 June–2 July 2021; pp. 2380–2387. [Google Scholar]
- Wang, W.; Mateos, L.A.; Park, S.; Leoni, P.; Gheneti, B.; Duarte, F.; Ratti, C.; Rus, D. Design, Modeling, and Nonlinear Model Predictive Tracking Control of a Novel Autonomous Surface Vehicle. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6189–6196. [Google Scholar]
- Wang, W.; Mateos, L.; Wang, Z.; Huang, K.W.; Schwager, M.; Ratti, C.; Rus, D. Cooperative Control of an Autonomous Floating Modular Structure Without Communication: Extended Abstract. In Proceedings of the 2019 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), New Brunswick, NJ, USA, 22–23 August 2019; pp. 44–46. [Google Scholar]
- Mogstad, A.A.; Johnsen, G.; Ludvigsen, M. Shallow-Water Habitat Mapping using Underwater Hyperspectral Imaging from an Unmanned Surface Vehicle: A Pilot Study. Remote Sens. 2019, 11, 685. [Google Scholar] [CrossRef]
- Udjus, G. Force Field Identification and Positioning Control of an Autonomous Vessel Using Inertial Measurement Units; NTNU: Trondheim, Norway, 2017. [Google Scholar]
- Dirdal, J.A.; Skjetne, R.; Roháč, J.; Fossen, T.I. Online wave direction and wave number estimation from surface vessel motions using distributed inertial measurement arrays and phase-time-path-differences. Ocean. Eng. 2022, 249, 110760. [Google Scholar] [CrossRef]
- Ghani, M.H.; Hole, L.R.; Fer, I.; Kourafalou, V.H.; Wienders, N.; Kang, H.; Drushka, K.; Peddie, D. The SailBuoy remotely-controlled unmanned vessel: Measurements of near surface temperature, salinity and oxygen concentration in the Northern Gulf of Mexico. Methods Oceanogr. 2014, 10, 104–121. [Google Scholar] [CrossRef]
- Osen, O.L.; Havnegjerde, A.; Kamsvåg, V.; Liavaag, S.; Bye, R.T. A low cost USV for aqua farm inspection. In Proceedings of the 2016 Techno-Ocean (Techno-Ocean), Kobe, Japan, 6–8 October 2016; pp. 291–298. [Google Scholar]
- Skjetne, R.; Smogeli, Ø.; Fossen, T.I. Modeling, identification, and adaptive maneuvering of CyberShip II: A complete design with experiments. IFAC Proc. Vol. 2004, 37, 203–208. [Google Scholar] [CrossRef]
- Skjetne, R. The Maneuvering Problem. Ph.D.Thesis, NTNU, Trondheim, Norway, 2005. [Google Scholar]
- Balbuena, J.; Quiroz, D.; Song, R.; Bucknall, R.; Cuellar, F. Design and implementation of an USV for large bodies of fresh waters at the highlands of Peru. In Proceedings of the OCEANS 2017, Anchorage, AL, USA, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Song, R.; Liu, Y.; Balbuena, J.; Cuellar, F.; Bucknall, R. Developing an energy effective autonomous usv for undertaking missions at the highlands of peru. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–7. [Google Scholar]
- Specht, M.; Specht, C.; Wąż, M.; Naus, K.; Grządziel, A.; Iwen, D. Methodology for Performing Territorial Sea Baseline Measurements in Selected Waterbodies of Poland. Appl. Sci. 2019, 9, 3053. [Google Scholar] [CrossRef]
- Costa, A.C.; Xu, H.; Soares, C.G. Robust parameter estimation of an empirical manoeuvring model using free-running model tests. J. Mar. Sci. Eng. 2021, 9, 1302. [Google Scholar] [CrossRef]
- Hinostroza, M.; Xu, H.; Soares, C.G. Experimental results of the cooperative operation of autonomous surface vehicles navigating in complex marine environment. Ocean. Eng. 2021, 219, 108256. [Google Scholar] [CrossRef]
- Xu, H.; Hinostroza, M.A.; Wang, Z.; Soares, C.G. Experimental investigation of shallow water effect on vessel steering model using system identification method. Ocean. Eng. 2020, 199, 106940. [Google Scholar] [CrossRef]
- Cruz, N.A.; Matos, A.; Cunha, S.; da Silva, S.O. Zarco-An Autonomous Craft for Underwater Surveys. In Proceedings of the 7th Geomatic Week 2007, Barcelona, Spain, 20–23 February 2007. [Google Scholar]
- Matos, A.; Cruz, N.A. Positioning control of an underactuated surface vessel. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–5. [Google Scholar]
- Cruz, N.A.; Alves, J.C.; Guedes, T.; Rodrigues, R.; Pinto, V.; Campos, D.; Silva, D. Integration of wind propulsion in an electric ASV. In Proceedings of the World Robotic Sailing championship and International Robotic Sailing Conference, Mariehamn, Åland (Finland), 31 August–4 September 2015; pp. 15–27. [Google Scholar]
- Silva, S.R.; Cunha, S.; Matos, A.; Cruz, N.A. Shallow water height mapping with interferometric synthetic aperture sonar. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Silva, S.R.; Cunha, S.; Matos, A.; Cruz, N.A. An Autonomous Boat Based Synthetic Aperture Sonar. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–7. [Google Scholar]
- Pinto, M.; Ferreira, B.; Matos, A.; Cruz, N.A. Side scan sonar image segmentation and feature extraction. In Proceedings of the OCEANS 2009, Biloxi, MI, USA, 26–29 October 2009; pp. 1–9. [Google Scholar]
- Silva, S.R.; Cunha, S.; Matos, A.; Cruz, N.A. Shallow water surveying using experimental interferometric synthetic aperture sonar. Mar. Technol. Soc. J. 2009, 43, 50–63. [Google Scholar] [CrossRef]
- Alves, J.C.; Ramos, T.; Cruz, N.A. A recongurable computing system for an autonomous sailboat. In Proceedings of the 1st International Robotic Sailing Conference, Guildford, UK, 4–6 September 2008. [Google Scholar]
- Alves, J.C.; Cruz, N.A. A mission programming system for an autonomous sailboat. In Proceedings of the 2014 Oceans—St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–7. [Google Scholar]
- Xiao, L.; Alves, J.C.; Cruz, N.A.; Jouffroy, J. Online speed optimization for sailing yachts using extremum seeking. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–6. [Google Scholar]
- Cruz, N.A.; Alves, J.C. Auto-heading controller for an autonomous sailboat. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar]
- Sousa, D.; Luís, M.; Sargento, S.; Pereira, A. An Aquatic Mobile Sensing USV Swarm with a Link Quality-Based Delay Tolerant Network. Sensors 2018, 18, 3440. [Google Scholar] [CrossRef]
- Sousa, D.; Hernandez, D.; Oliveira, F.; Luís, M.; Sargento, S. A Platform of Unmanned Surface Vehicle Swarms for Real Time Monitoring in Aquaculture Environments. Sensors 2019, 19, 4695. [Google Scholar] [CrossRef]
- Sousa, D.; Sargento, S.; Pereira, A.; Luís, M. Self-adaptive team of aquatic drones with a communication network for aquaculture. In Proceedings of the Progress in Artificial Intelligence: 19th EPIA Conference on Artificial Intelligence, EPIA 2019, Vila Real, Portugal, 3–6 September 2019; Proceedings, Part II 19. pp. 569–580. [Google Scholar]
- Patricio, J.; Luís, M.; Sargento, S. Passive Gateway Election Mechanisms for Swarms of Drones in Aquatic Sensing Environments. In Proceedings of the 2020 27th International Conference on Telecommunications (ICT), London, UK, 5–7 October 2020; pp. 1–6. [Google Scholar]
- Weston Robot. Unmanned Surface Vessel ELFIN. Available online: https://www.westonrobot.com/unmanned-surface-vessel-ELFIN (accessed on 3 September 2023).
- Cabrera-Gámez, J.; Ramos de Miguel, A.; Domínguez-Brito, A.C.; Hernández-Sosa, J.D.; Isern-González, J.; Fernández-Perdomo, E. An embedded low-power control system for autonomous sailboats. In Proceedings of the Robotic Sailing 2013: 6th International Robotic Sailing Conference, Brest, France, 2–6 September 2013; pp. 67–79. [Google Scholar]
- Santana-Jorge, F.J.; Domínguez-Brito, A.C.; Cabrera-Gámez, J. A Component-Based C++ Communication Middleware for an Autonomous Robotic Sailboat. In Robotic Sailing 2017; Springer: Cham, Switzerland, 2018; pp. 39–54. [Google Scholar]
- Domínguez-Brito, A.C.; Valle-Fernández, B.; Cabrera-Gámez, J.; Ramos-de-Miguel, A.; García, J.C. A-TIRMA G2: An Oceanic Autonomous Sailboat. In Robotic Sailing 2015; Springer: Cham, Switzerland, 2016; pp. 3–13. [Google Scholar]
- Cabrera-Gámez, J.; Domínguez-Brito, A.C.; Santana-Jorge, F.; Gamo, D.; Jiménez, D.; Guerra, A.; Castro, J.J. Acoustic detection of tagged angelsharks from an autonomous sailboat. In Proceedings of the Robot 2019: Fourth Iberian Robotics Conference: Advances in Robotics, Porto, Portugal, 20–22 November 2020; Volume 1, pp. 295–304. [Google Scholar]
- Malheiro, B.; Silva, M.S.; Guedes, P.; Ferreira, P. Airfoil Selection and Wingsail Design for an Autonomous Sailboat. In Proceedings of the Robot 2019: Fourth Iberian Robotics Conference, Porto, Portugal, 20–22 November 2019. [Google Scholar]
- Giron-Sierra, J.M.; Gheorghita, A.T.; Angulo, G.; Jimenez, J.F. Preparing the automatic spill recovery by two unmanned boats towing a boom: Development with scale experiments. Ocean. Eng. 2015, 95, 23–33. [Google Scholar] [CrossRef]
- Giron-Sierra, J.M.; Gheorghita, A.T.; Jiménez, J. Fully automatic boom towing by unmanned ships: Experimental study. In Proceedings of the OCEANS 2015—MTS/IEEE, Washington, DC, USA, 19–22 October 2015; pp. 1–10. [Google Scholar]
- Giron-Sierra, J.M.; Jimenez, J.F. Using an USV for Automatic Deployment of a Boom Around a Ship: Simulation and Scale Experiment. In Proceedings of the OCEANS 2018 MTS/IEEE, Charleston, NC, USA, 22–25 October 2018; pp. 1–10. [Google Scholar]
- Giron-Sierra, J.M.; Gheorghita, A.T.; Angulo, G.; Jimenez, J.F. Towing a boom with two USVs for oil spill recovery: Scaled experimental development. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 1729–1734. [Google Scholar]
- Lopperi, T.; Söderberg, H. Development and Systems Integration of Small Hydrofoiling Robot for Mapping and Sensing; KTH Royal Institute of Technology: Stockholm, Sweden, 2022. [Google Scholar]
- Tsai, C.-M.; Lai, Y.-H.; Perng, J.-W.; Tsui, I.-F.; Chung, Y.-J. Design and application of an autonomous surface vehicle with an AI-based sensing capability. In Proceedings of the 2019 IEEE Underwater Technology (UT), Kaohsiung, Taiwan, 16–19 April 2019; pp. 1–4. [Google Scholar]
- Abrougui, H.; Nejim, S.; Hachicha, S.; Zaoui, C.; Dallagi, H. Modeling, parameter identification, guidance and control of an unmanned surface vehicle with experimental results. Ocean. Eng. 2021, 241, 110038. [Google Scholar] [CrossRef]
- Abrougui, H.; Nejim, S. Autopilot Design for an Unmanned Surface Vehicle Based on Backstepping Integral Technique with Experimental Results. J. Mar. Sci. Appl. 2023, 22, 614–623. [Google Scholar] [CrossRef]
- Sauzé, C.; Neal, M. An autonomous sailing robot for ocean observation. In Proceedings of the TAROS 2006, Guildford, UK, 4–6 September 2006; pp. 190–197. [Google Scholar]
- Sauzé, C.; Neal, M. Design considerations for sailing robots performing long term autonomous oceanography. In Proceedings of the International Robotic Sailing Conference, Breitenbrunn, Austria, 23–24 May 2008; pp. 21–29. [Google Scholar]
- Sauzé, C.; Neal, M. A biologically inspired approach to long term autonomy and survival in sailing robots. In Proceedings of the International Robotic Sailing Conference, Breitenbrunn, Austria, 23–24 May 2008; pp. 6–11. [Google Scholar]
- Watson, C.S.; Quincey, D.J.; Carrivick, J.L.; Smith, M.W.; Rowan, A.V.; Richardson, R. Heterogeneous water storage and thermal regime of supraglacial ponds on debris-covered glaciers. Earth Surf. Process. Landf. 2018, 43, 229–241. [Google Scholar] [CrossRef]
- Metcalfe, B.; Thomas, B.; Treloar, A.; Rymansaib, Z.; Hunter, A.; Wilson, P. A compact, low-cost unmanned surface vehicle for shallow inshore applications. In Proceedings of the 2017 Intelligent Systems Conference (IntelliSys), London, UK, 7–8 September 2017; pp. 961–968. [Google Scholar]
- The Wave Glider; Liquid Robotics: 2023. Available online: https://www.liquid-robotics.com/wave-glider/how-it-works/ (accessed on 15 September 2023).
- Manley, J.E.; Willcox, S. The Wave Glider: A persistent platform for ocean science. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–5. [Google Scholar]
- Wiggins, S.; Manley, J.E.; Brager, E.; Woolhiser, B. Monitoring marine mammal acoustics using wave glider. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–4. [Google Scholar]
- Maqueda, M.M.; Penna, N.; Williams, S.; Foden, P.; Martin, I.; Pugh, J. Water surface height determination with a GPS wave glider: A demonstration in Loch Ness, Scotland. J. Atmos. Ocean. Technol. 2016, 33, 1159–1168. [Google Scholar] [CrossRef]
- Penna, N.T.; Morales Maqueda, M.A.; Martin, I.; Guo, J.; Foden, P.R. Sea surface height measurement using a GNSS wave glider. Geophys. Res. Lett. 2018, 45, 5609–5616. [Google Scholar] [CrossRef]
- Moh, T.; Jang, N.; Jang, S.; Cho, J.H. Application of a winch-type towed acoustic sensor to a wave-powered unmanned surface vehicle. Def. Sci. J. 2017, 67, 125. [Google Scholar] [CrossRef]
- Jha, R. Wave measurement methodology and validation from wave glider unmanned surface vehicles. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–7. [Google Scholar]
- Raber, G.T.; Schill, S.R. A low-cost small unmanned surface vehicle (sUSV) for very high-resolution mapping and monitoring of shallow marine habitats. In Proceedings of the Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions, Strasbourg, France, 9–10 September 2019; pp. 14–23. [Google Scholar]
- Manley, J.E.; Marsh, A.; Cornforth, W.; Wiseman, C. Evolution of the autonomous surface craft AutoCat. In Proceedings of the OCEANS 2000 MTS/IEEE conference and exhibition. Conference proceedings (Cat. No. 00CH37158), Providence, RI, USA, 11–14 September 2000; pp. 403–408. [Google Scholar]
- Thompson, N.T.; Whitworth, P.R.; Matveev, K.I. Development of small-scale unmanned hydrofoil boats. J. Unmanned Veh. Syst. 2020, 9, 21–32. [Google Scholar] [CrossRef]
- Curcio, J.; Leonard, J.; Patrikalakis, A. SCOUT-a low cost autonomous surface platform for research in cooperative autonomy. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; pp. 725–729. [Google Scholar]
- Curcio, J.; Schneider, T.; Benjamin, M.; Patrikalakis, A. Autonomous surface craft provide flexibility to remote adaptive oceanographic sampling and modeling. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Valada, A.; Velagapudi, P.; Kannan, B.; Tomaszewski, C.; Kantor, G.; Scerri, P. Development of a low cost multi-robot autonomous marine surface platform. In Proceedings of the Field and Service Robotics: Results of the 8th International Conference; Springer: Berlin/Heidelberg, Germany, 2014; pp. 643–658. [Google Scholar]
- El-Gaaly, T.; Tomaszewski, C.; Valada, A.; Velagapudi, P.; Kannan, B.; Scerri, P. Visual obstacle avoidance for autonomous watercraft using smartphones. In Proceedings of the AAMAS 13 Workshop on Autonomous Robots and Multirobot Systems, St. Paul, MN, USA, 6–7 May 2013. [Google Scholar]
- Valada, A.; Tomaszewski, C.; Kannan, B.; Velagapudi, P.; Kantor, G.; Scerri, P. An intelligent approach to hysteresis compensation while sampling using a fleet of autonomous watercraft. In Proceedings of the Intelligent Robotics and Applications: 5th International Conference, ICIRA 2012, Montreal, QC, Canada, Proceedings; 3–5 October 2012; Part II 5. pp. 472–485. [Google Scholar]
- Azevedo, D.; Beltram, S.; DelVecchio, G.; Hopner, B. MARV: Marine Autonomous Research Vessel. Bachelor Thesis, Clara University, Santa Clara, CA, USA, 2016. [Google Scholar]
- Miller, P.; Beal, B.; Capron, C.; Gawboy, R.; Mallory, P.; Ness, C.; Petrosik, R.; Pryne, C.; Murphy, T.; Spears, H. Increasing performance and added capabilities of usna sail-powered autonomous surface vessels (asv). In Proceedings of the International Robotic Sailing Conference, Kingston, ON, Canada, 6–10 June 2010. [Google Scholar]
- Miller, P.H.; Hamlet, M.; Rossman, J. Continuous Improvements to USNA SailBots for Inshore Racing and Offshore Voyaging; Springer: Berlin/Heidelberg, Germany, 2013; pp. 49–60. [Google Scholar]
- Miller, P.; Beeler, A.; Cayaban, B.; Dalton, M.; Fach, C.; Link, C.; MacArthur, J.; Urmenita, J.; Medina, R.Y. An easy-to-build, low-cost, high-performance SailBot. In Robotic Sailing 2014: Proceedings of the 7th International Robotic Sailing Conference; Springer: Berlin/Heidelberg, Germany, 2015; pp. 3–16. [Google Scholar]
- Powers, C.; Hanlon, R.; Schmale III, D.G. Remote collection of microorganisms at two depths in a freshwater lake using an unmanned surface vehicle (USV). PeerJ 2018, 6, e4290. [Google Scholar] [CrossRef]
- Casper, A.F.; Dixon, B.; Steimle, E.T.; Hall, M.L.; Conmy, R.N. Scales of heterogeneity of water quality in rivers: Insights from high resolution maps based on integrated geospatial, sensor and ROV technologies. Appl. Geogr. 2012, 32, 455–464. [Google Scholar] [CrossRef]
- Casper, A.F.; Steimle, E.; Hall, M.; Dixon, B. Combined GIS and ROV technologies improve characterization of water quality in Coastal Rivers of the Gulf of Mexico. In Proceedings of the OCEANS 2009, Bremen, Germany, 11–14 May 2009; pp. 1–9. [Google Scholar]
- Tran, N.-H.; Pham, Q.-H.; Lee, J.-H.; Choi, H.-S. VIAM-USV2000: An Unmanned Surface Vessel with Novel Autonomous Capabilities in Confined Riverine Environments. Machines 2021, 9, 133. [Google Scholar] [CrossRef]
- Tran, N.-H.; Pham, N.-N.-T. Design Adaptive Controller and Guidance System of an Unmanned Surface Vehicle for Environmental Monitoring Applications. In Proceedings of the 2018 4th International Conference on Green Technology and Sustainable Development (GTSD), Ho Chi Minh City, Vietnam, 23–24 November 2018; pp. 615–620. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bolbot, V.; Sandru, A.; Saarniniemi, T.; Puolakka, O.; Kujala, P.; Valdez Banda, O.A. Small Unmanned Surface Vessels—A Review and Critical Analysis of Relations to Safety and Safety Assurance of Larger Autonomous Ships. J. Mar. Sci. Eng. 2023, 11, 2387. https://doi.org/10.3390/jmse11122387
Bolbot V, Sandru A, Saarniniemi T, Puolakka O, Kujala P, Valdez Banda OA. Small Unmanned Surface Vessels—A Review and Critical Analysis of Relations to Safety and Safety Assurance of Larger Autonomous Ships. Journal of Marine Science and Engineering. 2023; 11(12):2387. https://doi.org/10.3390/jmse11122387
Chicago/Turabian StyleBolbot, Victor, Andrei Sandru, Ture Saarniniemi, Otto Puolakka, Pentti Kujala, and Osiris A. Valdez Banda. 2023. "Small Unmanned Surface Vessels—A Review and Critical Analysis of Relations to Safety and Safety Assurance of Larger Autonomous Ships" Journal of Marine Science and Engineering 11, no. 12: 2387. https://doi.org/10.3390/jmse11122387