An Improved Progressive TIN Densification Filtering Method Considering the Density and Standard Variance of Point Clouds


Abstract
:1. Introduction
- The rarefied points may miss the topographic features and the constructed DTM cannot reflect the true ground surface.
- The threshold is difficult to determine. If the given threshold is higher than the real threshold, objective points will be regarded as ground points. If the given threshold is lower than the real threshold, the ground points cannot be removed completely.
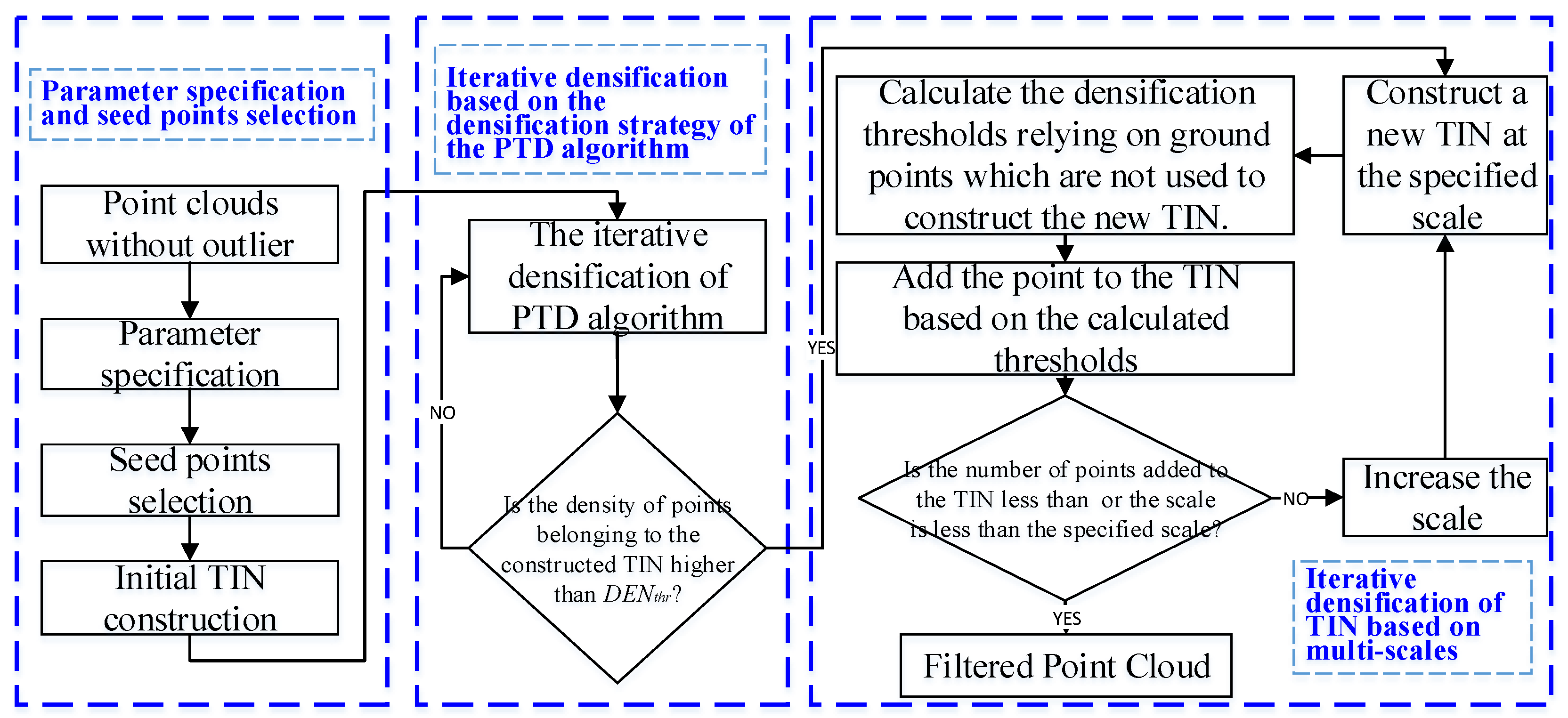
- In the first stage, the densification strategy of the classical PTD algorithm is used; and the initial TIN is densified until the density of points belonging to the TIN reaches a certain value (in this paper, we define the value as the standard variance intervention density).
- In the second stage, a new strategy based on multi-scales for densification is proposed. In this densification strategy, a contour interpolation method based-triangulation is used for the calculation of densification parameters.
- Section 2 analyzes how the density and standard variance of point clouds impact the performance of the classical PTD algorithm and details the improved PTD algorithm.
- Section 3 presents the performance evaluation and discusses the experimental results using two test patches of the Vaihingen dataset followed by a comparative analysis.
- Section 4 concludes the paper.
2. Methodology
2.1. PTD Algorithm
- Parameter input. According to the commercial software TerraSolid, five key parameters should be determined in the PTD algorithm: , which determines the size of grid cell; , which decides whether adopts the mirror technology; , which is the maximum angle between the TIN facet and a line that links an unclassified point to the closest vertex of the facet; , which is the maximum distance from an unclassified point to the corresponding TIN facet; and , which represents the minimum threshold for the maximum edge length of TIN facet.
- Seed point selection. The lowest point within a user-defined grid, the size of which is based on , is selected. These lowest points are seed points, and the seed points are used to construct the initial TIN. Notably, before the selection of seed points, the outliers of point clouds should be removed so that there are no outliers among the selected seed points.
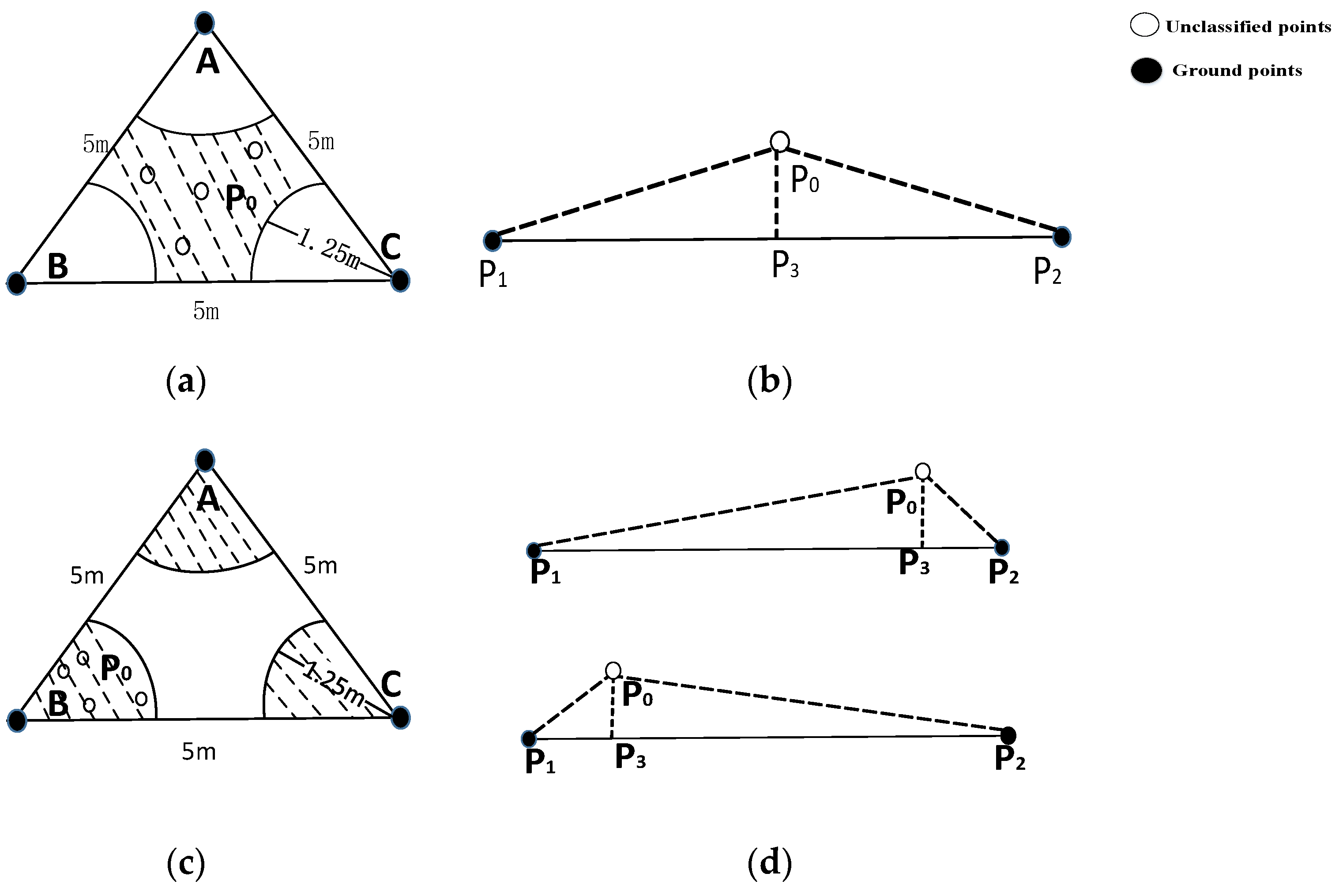
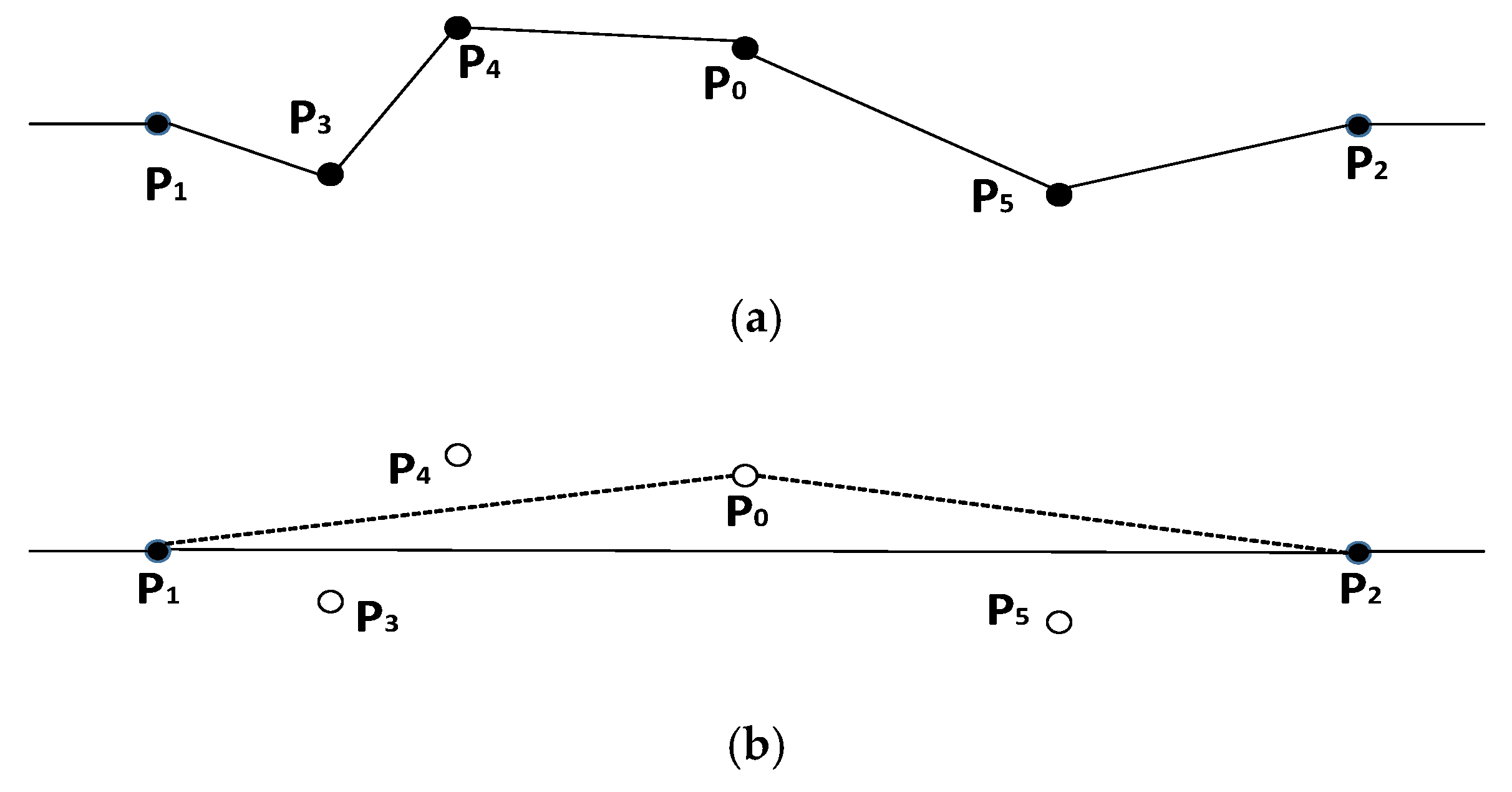
- Iterative densification of the TIN. The densification parameters for each iteration are calculated using the ground points belonging to TIN and an unclassified point is added to TIN if both the angle and distance values from this point to TIN facet are below the calculated densification parameters. This is continued until all points are classified as ground points or objective points.
2.2. The Density and Standard Variance of Point Clouds
2.3. The Impact of the Density and Variance of Point Clouds on the Filtering Performance of the PTD Algorithm
2.4. The Change of Densification Thresholds Considering the Density and Standard Variance of Point Clouds in the Process of Iterative Densification
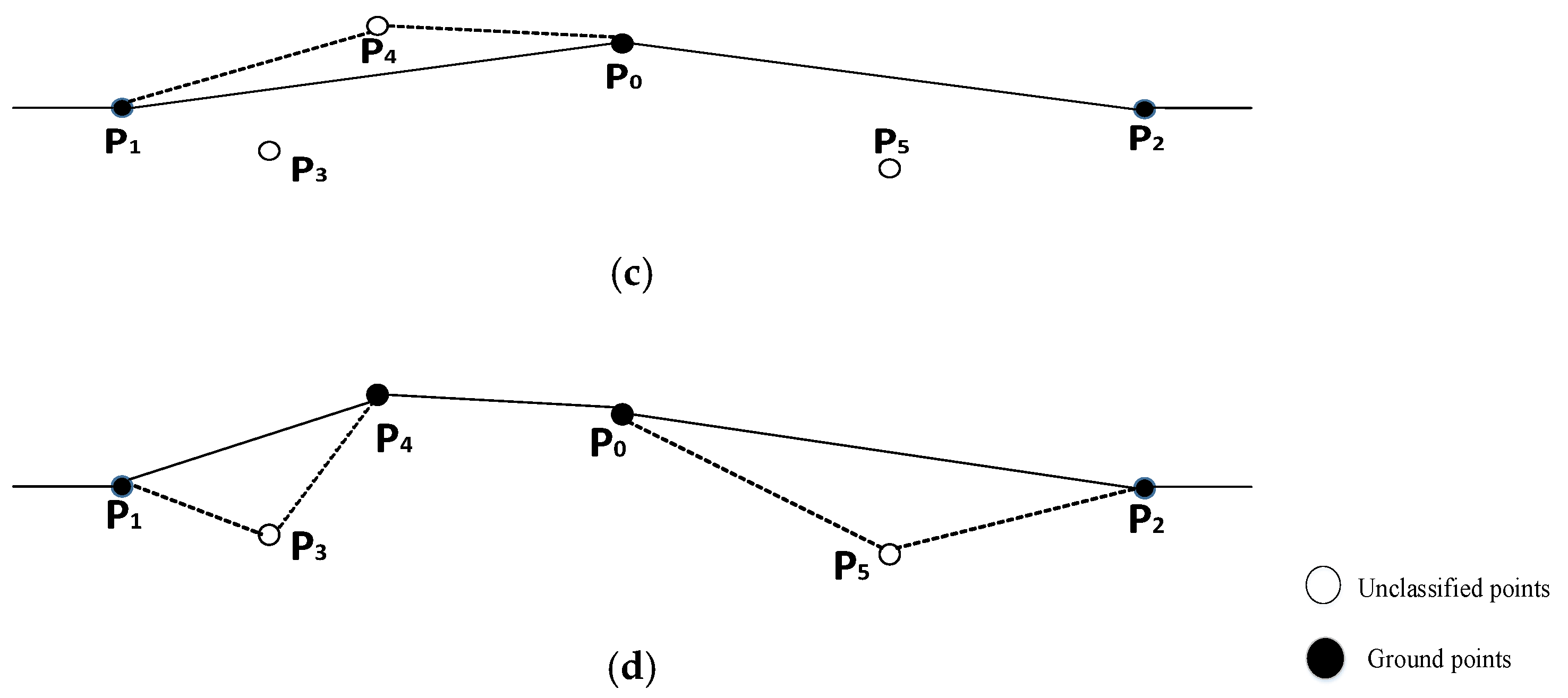
- In the initial densification stage, the TIN constructed by seed points only reflects the coarse ground surface shape. With the increase of points belonging to the TIN, the TIN is densified and is more approximate to the real terrain surface. In this stage, the calculated parameters include the angle and distance from the ground points to the TIN become smaller.
- In the second stage, the density of points belonging to TIN reaches a certain value. The horizontal distance between the added point and the vertex of the triangle becomes smaller, so that the standard variance of point clouds will cause that the calculated angle is beyond the angle threshold. The unclassified ground point will be rejected by the TIN. To guarantee that unclassified ground points can be added to the network as much as possible, the angle threshold should become larger in this stage.
2.5. Our Improved PTD Algorithm
2.5.1. Parameter Specification and Seed Point Selection
2.5.2. Iterative Densification Based on the Densification Strategy of the PTD Algorithm
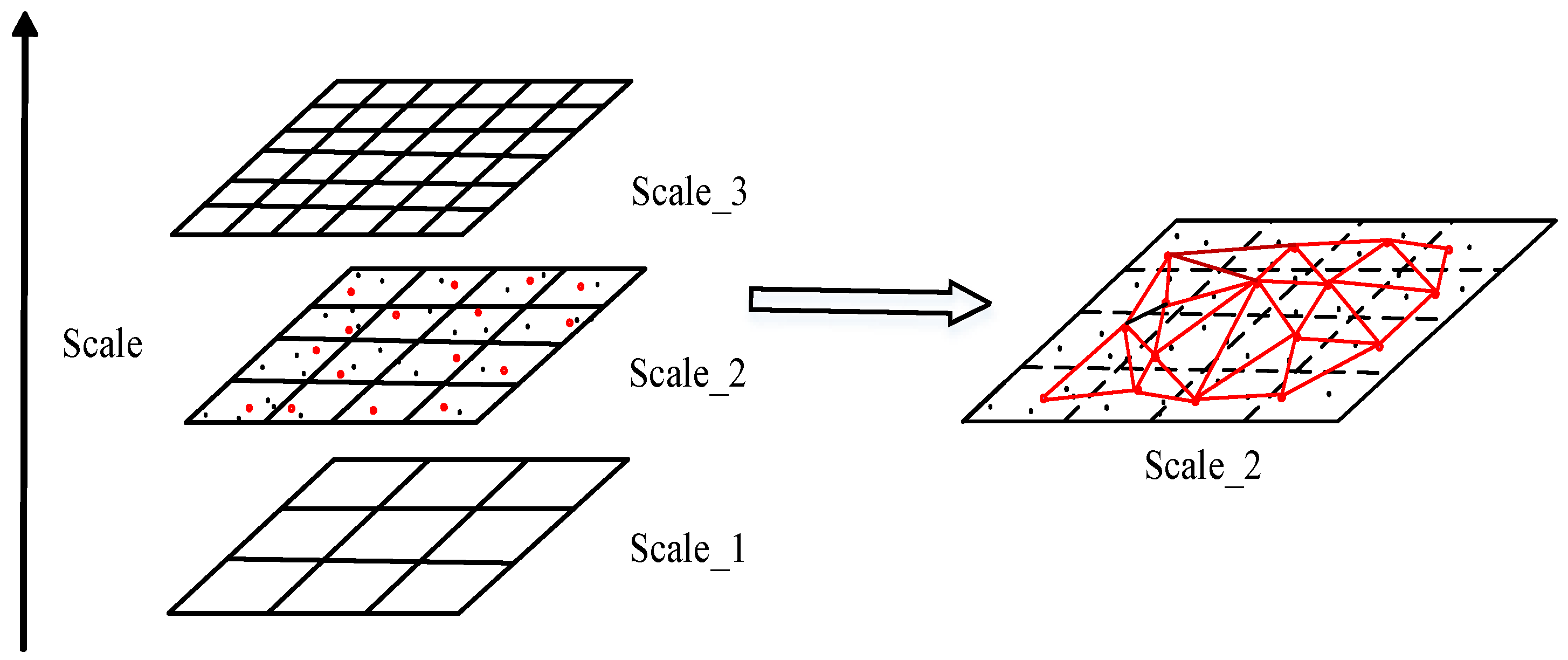
2.5.3. Iterative Densification of TIN Based on Multi-Scales
- Divide ground points obtained in the third step into grids according to the specified scale and use the resampled points to construct a new TIN.
- Calculate the densification thresholds including angle and distance threshold.
- If both the calculated angle and distance values of an unclassified point are less than the calculated densification thresholds, this point is classified as a ground point; otherwise, it is an objective point. If the number of points added to the new TIN is less than or the given scale is less than , go to the fifth step; otherwise, go to the fourth step.
- Increase the scale (e.g., reduce the size of grid cell) and go to the first step.
- The filtering is finished and results are output.
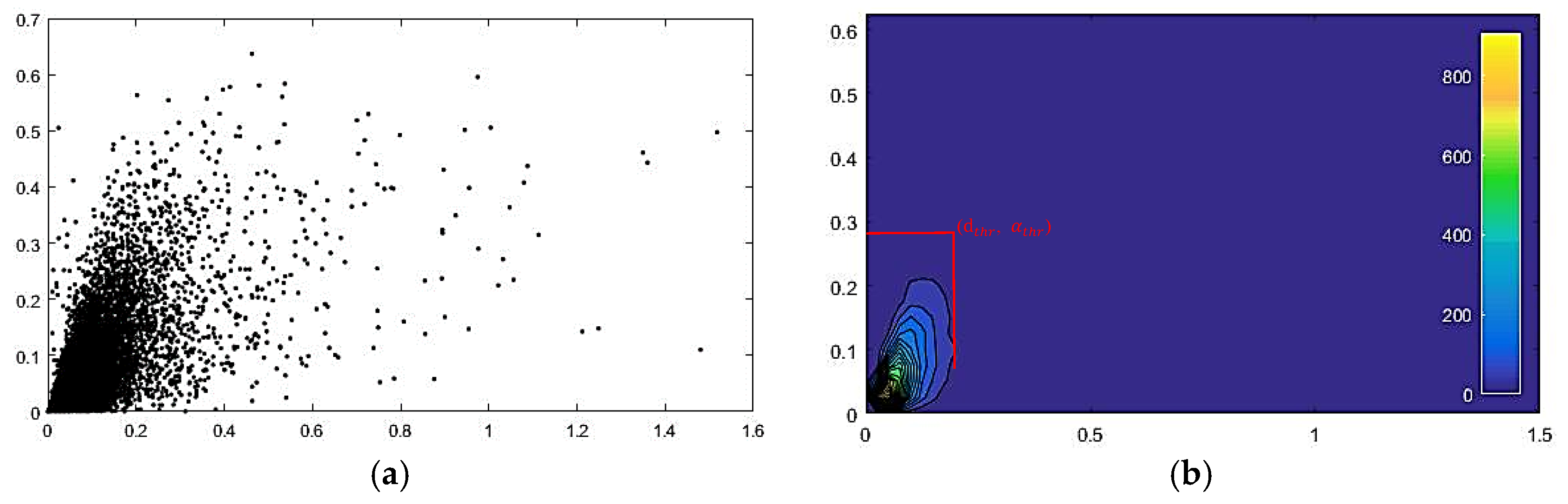
- Calculate the angle and distance values from ground points which are not used to construct the new TIN to this TIN.
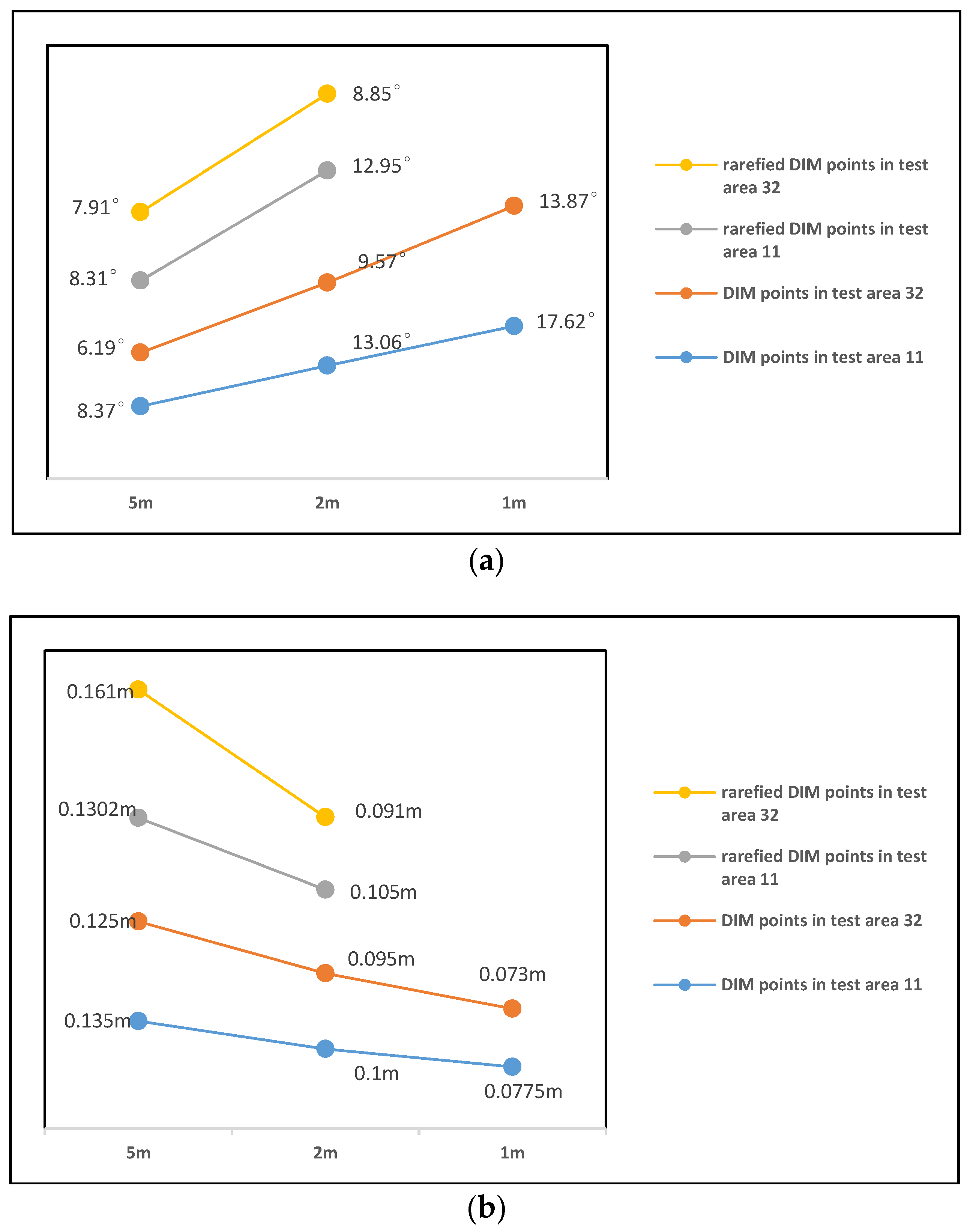
- Project the calculated distance and angle values to a plane with the angle value on the vertical axis and the distance value on the horizontal axis, as shown in Figure 5a.
- Divide the two-dimensional planar into grids according to the specific size and calculate the number of points within each grid.
3. Experiments and Performance Evaluation
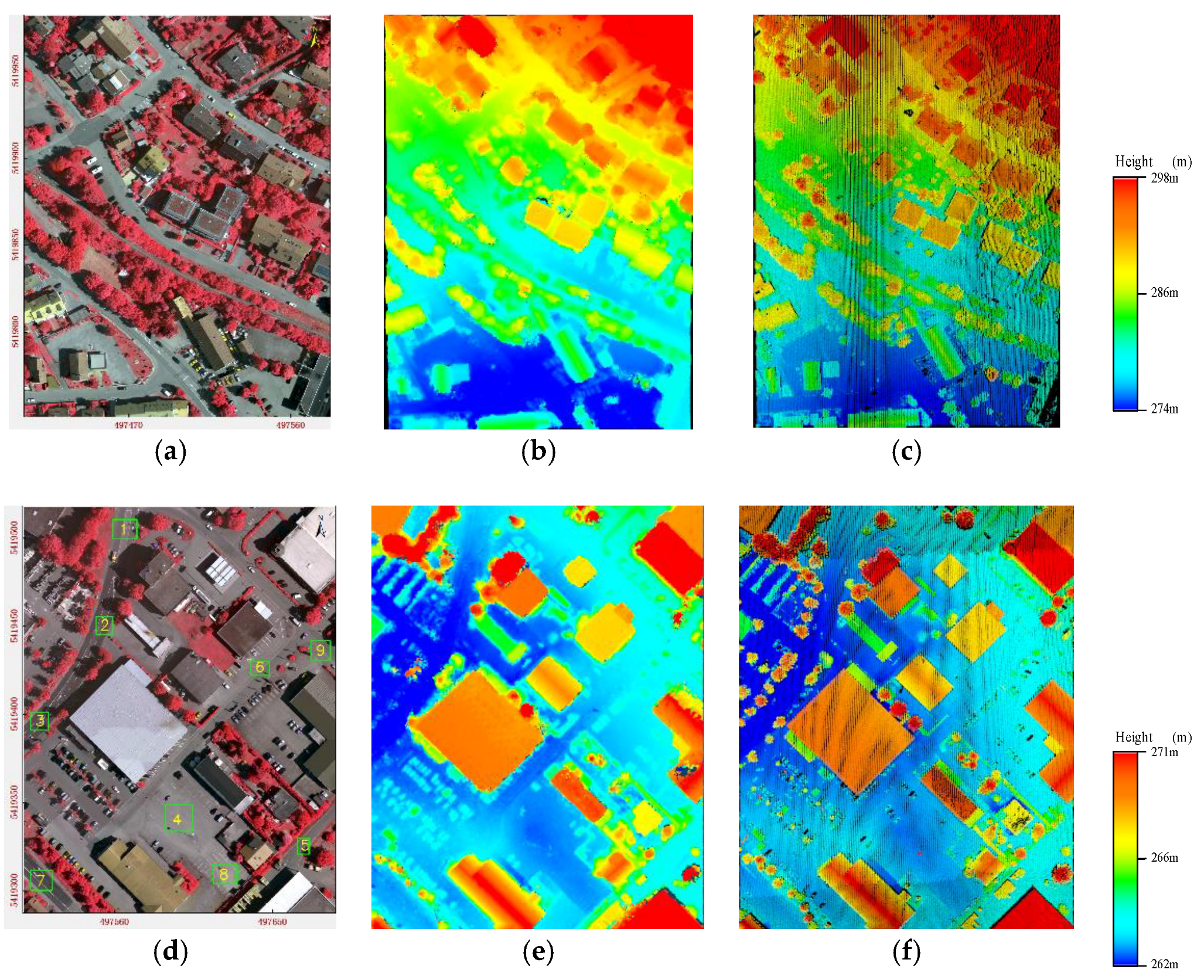
3.1. Data Description and Study Area
3.2. Parameter Selection
3.3. Performance Evaluation between the PTD Algorithm and Improved PTD Algorithm
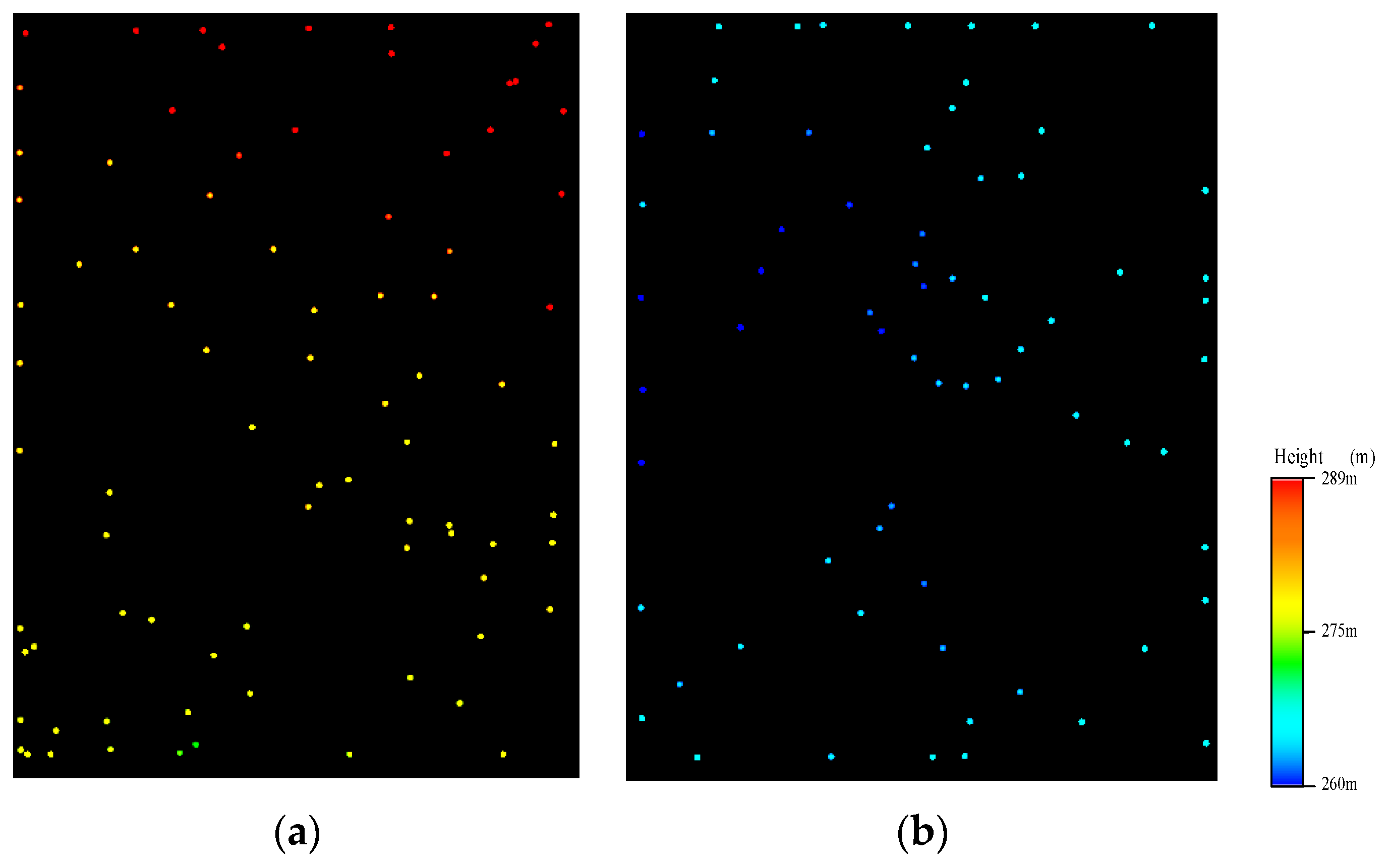
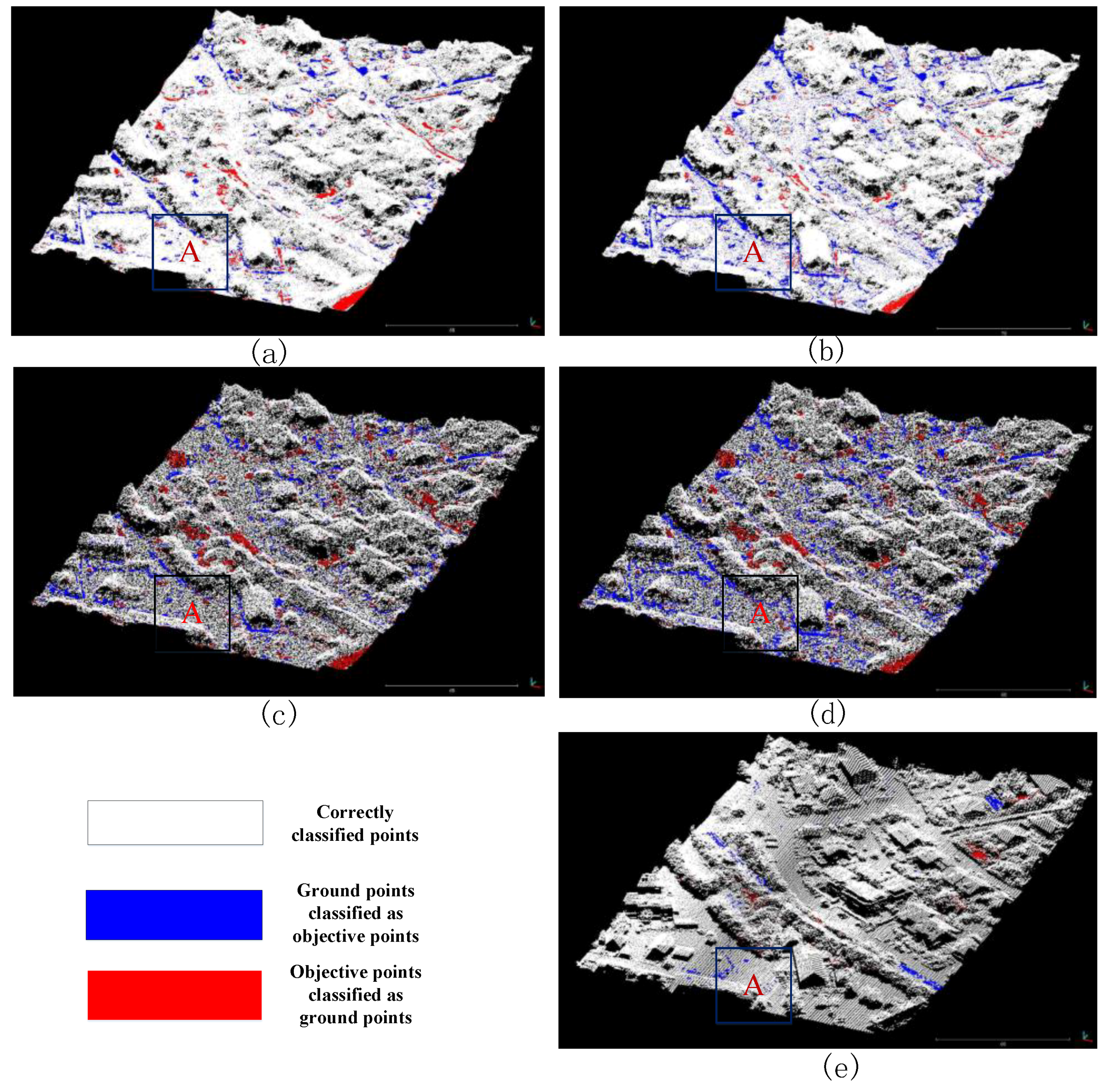
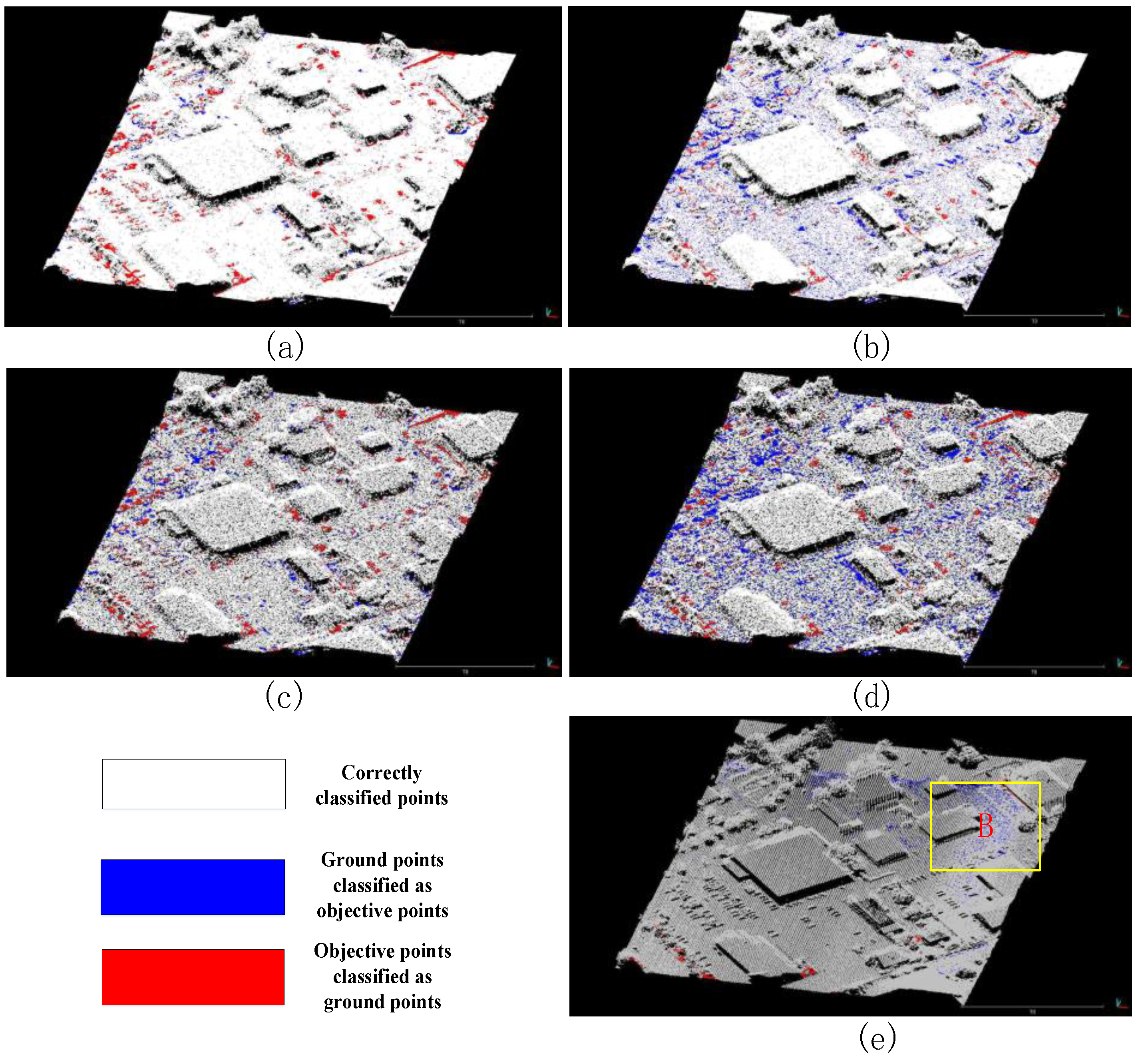
3.3.1. Qualitative Analysis
- The standard variance of the DIM point clouds is higher than that of ALS data when the densities of point clouds are the same. We o concluded this because the comparison of the filtering results of the PTD method for the rarefied DIM point clouds and the ALS data in two test areas indicates that the high standard variance of point clouds damages the performance of the PTD algorithm.
- The high density of DIM point clouds can also damage the performance of the PTD algorithm when the standard variances of point clouds are the same. The filtering results of the PTD method for the DIM point clouds and the rarefied DIM point clouds confirm this conclusion. In fact, the type I errors of the PTD method on the rarefied DIM point clouds are 7.4% and 9.6% in the two test areas, respectively, and are lower than that of the PTD method on the original DIM point clouds. The above analysis agrees with previous studies (see Section 2.3), which demonstrates that the high standard variance and density of point clouds impact the performance of the PTD method.
3.3.2. Quantitative Analysis
3.4. The Change of Iterative Densification Thresholds in the Improved PTD Algorithm
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rau, J.Y.; Jhan, J.P.; Hsu, Y.C. Analysis of Oblique Aerial Images for Land Cover and Point Cloud Classification in an Urban Environment. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1304–1319. [Google Scholar] [CrossRef]
- Tang, H.; Brolly, M.; Zhao, F.; Strahler, A.H.; Schaaf, C.L.; Ganguly, S.; Zhang, G.; Dubayah, R. Deriving and validating Leaf Area Index (LAI) at multiple spatial scales through Lidar remote sensing: A case study in Sierra National Forest, CA. Remote Sens. Environ. 2014, 143, 131–141. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne Lidar data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Dahlke, D.; Linkiewicz, M.; Meissner, H. True 3D building reconstruction: Façade, roof and overhang modelling from oblique and vertical aerial imagery. Int. J. Image Data Fusion 2015, 6, 314–329. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Hu, H.; Ding, Y.; Zhu, Q.; Wu, B.; Lin, H.; Du, Z.; Zhang, Y.; Zhang, Y. An adaptive surface filter for airborne laser scanning point clouds by means of regularization and bending energy. ISPRS J. Photogramm. Remote Sens. 2014, 92, 98–111. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, X. Filtering airborne Lidar data by embedding smoothness-constrained segmentation in progressive TIN densification. ISPRS J. Photogramm. Remote Sens. 2013, 81, 44–59. [Google Scholar] [CrossRef]
- Sithole, G. Filtering of laser altimetry data using a slope adaptive filter. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2001, 34, 203–210. [Google Scholar]
- Susaki, J. Adaptive slope filtering of airborne Lidar data in urban areas for digital terrain model (DTM) generation. Remote Sens. 2012, 4, 1804–1819. [Google Scholar] [CrossRef] [Green Version]
- Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. 2000, 33, 935–942. [Google Scholar]
- Lohmann, P. Segmentation and filtering of laser scanner digital surface models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 311–316. [Google Scholar]
- Shen, J.; Liu, J.; Lin, X.; Zhao, R. Object-based classification of airborne light detection and ranging point clouds in human settlements. Sens. Lett. 2012, 10, 221–229. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Filtering of airborne laser scanner data based on segmented point clouds. In Proceedings of the Laser Scanning 2005, Enschede, The Netherlands, 12–15 September 2005. [Google Scholar]
- Yan, M.; Blaschke, T.; Liu, Y.; Wu, L. An object-based analysis filtering algorithm for airborne laser scanning. Int. J. Remote Sens. 2012, 33, 7099–7116. [Google Scholar] [CrossRef]
- Glenn, N.; Spaete, L.; Sankey, T.; Derryberry, D.; Hardegree, S.; Mitchell, J. Errors in LiDAR-derived shrub height and crown area on sloped terrain. J. Arid Environ. 2011, 75, 377–382. [Google Scholar] [CrossRef]
- Sankey, T.T.; Bond, P. LiDAR-based classification of sagebrush community types. Rangel. Ecol. Manag. 2011, 64, 92–98. [Google Scholar] [CrossRef]
- Murphy, P.N.; Ogilvie, J.; Meng, F.R.; Arp, P. Stream network modelling using Lidar and photogrammetric digital elevation models: A comparison and field verification. Hydrol. Process. 2008, 22, 1747–1754. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Baldocchi, D.; Xie, G. Filtering airborne laser scanning data with morphological methods. Photogramm. Eng. Remote Sens. 2007, 73, 175–185. [Google Scholar] [CrossRef]
- Hui, Z.; Hu, Y.; Yevenyo, Y.Z.; Yu, X. An Improved Morphological Algorithm for Filtering Airborne Lidar Point Cloud Based on Multi-Level Kriging Interpolation. Remote Sens. 2016, 8, 35. [Google Scholar] [CrossRef]
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, S.-C.; Whitman, D.; Shyu, M.-L.; Yan, J.; Zhang, C. A progressive morphological filter for removing non ground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Kobler, A.; Pfeifer, N.; Ogrinc, P.; Todorovski, L.; Oštir, K.; Dzěroski, S. Repetitive interpolation: A robust algorithm for DTM generation from Aerial Laser Scanner Data in forested terrain. Remote Sens. Environ. 2007, 108, 9–23. [Google Scholar] [CrossRef]
- Polat, N.; Uysal, M.; Toprak, A.S. An investigation of DEM generation process based on Lidar data filtering, decimation, and interpolation methods for an urban area. Measurement 2015, 75, 50–56. [Google Scholar] [CrossRef]
- Axelsson, P. DEM Generation from Laser Scanner Data Using Adaptive TIN Models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Lin, X.; Zhang, J. Segmentation-based filtering of airborne Lidar point clouds by progressive densification of terrain segments. Remote Sens. 2014, 6, 1294–1326. [Google Scholar] [CrossRef]
- Wang, H.; Wang, S.; Chen, Q.; Jin, W.; Sun, M. An improved filter of progressive TIN densification for LiDAR point cloud data. Wuhan Univ. J. Nat. Sci. 2015, 20, 362–368. [Google Scholar] [CrossRef]
- Nie, S.; Wang, C.; Dong, P.; Xi, X.; Luo, S.; Qinetl, H. A revised progressive TIN densification for filtering airborne Lidar data. Measurement 2017, 104, 70–77. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, X.; Ning, X. SVM-Based Classification of Segmented Airborne Lidar Point Clouds in Urban Areas. Remote Sens. 2013, 5, 3749–3775. [Google Scholar] [CrossRef]
- Yilmaz, C.S.; Gungor, O. Comparison of the performances of ground filtering algorithms and DTM generation from a UAV-based point cloud. Geocarto Int. 2016, 32, 1–41. [Google Scholar]
- Zhang, Z.; Gerke, M.; Vosselman, G.; Yang, M.Y. Filtering Photogrammetric Point Clouds Using Standard Lidar Filters Towards Dtm Generation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 2, 319–326. [Google Scholar] [CrossRef]
- Maltezos, E.; Ioannidis, C. Automatic Detection of Building Points from Lidar and Dense Image Matching Point Clouds. In Proceedings of the ISPRS Geospatial Week 2015, 28 September–2 October 2015; pp. 39–41. [Google Scholar]
- Nex, F.; Remondino, F. Automatic Roof Outlines Reconstruction from Photogrammetric DSM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 257–262. [Google Scholar] [CrossRef]
- Gerke, M.; Xiao, J. Fusion of airborne laser scanning point clouds and images for supervised and unsupervised scene classification. ISPRS J. Photogramm. Remote Sens. 2014, 87, 78–92. [Google Scholar] [CrossRef]
- Agisoft. Agisoft PhotoScan. 2018. Available online: http://www.agisoft.ru/products/photoscan/professional/ (accessed on 25 August 2018).
- Dong, Y.Q.; Zhang, L.; Cui, X.M.; Ai, H.B. An Automatic Filter Algorithm for Dense Image Matching Point Clouds. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 703–709. [Google Scholar] [CrossRef]
- Mann, P.S. Introductory Statistics, 7th ed.; John Wiley and Sons Inc.: New York, NY, USA, 2010. [Google Scholar]
- The Math Works, Inc. Interpolating Scattered Data. Available online: https://www.mathworks.com/help/matlab/math/int erpolating-scattered-data.html (accessed on 30 September 2018).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Area | Long (m) Width (m) | The Type of Data | The Number of Points | Density |
|---|---|---|---|---|
| 11 | DIM point clouds | 1,678,370 | 2 | |
| ALS data | 164,452 | 2 | ||
| 32 | DIM point clouds | 1,477,565 | 2 | |
| ALS data | 275,679 | 2 |
| Selected Area | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | Average |
|---|---|---|---|---|---|---|---|---|---|---|
| The standard variance of the DIM point clouds (m) | 0.077 | 0.053 | 0.089 | 0.073 | 0.07 | 0.055 | 0.061 | 0.054 | 0.063 | 0.066 |
| The standard variance of the ASL data (m) | 0.021 | 0.02 | 0.017 | 0.04 | 0.021 | 0.031 | 0.022 | 0.032 | 0.041 | 0.027 |
| Test Area | The Type of Data | The Initial Parameter in Filtering | ||||
|---|---|---|---|---|---|---|
| Grid Size/m | Terrain Angle/° | Max Angle/° | Max Distance/m | Minimum Edge Length/m | ||
| 11 | DIM point clouds | 30 | 88 | 6 | 1.4 | - |
| ALS data | 30 | 88 | 6 | 1.4 | - | |
| 32 | DIM point clouds | 30 | 88 | 6 | 0.8 | - |
| ALS data | 30 | 88 | 6 | 0.8 | - | |
| Test Area | Type of Data | PTD-Type of Error | Improved PTD-Type of Error | ||||
|---|---|---|---|---|---|---|---|
| I (%) | II (%) | Total (%) | I (%) | II (%) | Total (%) | ||
| Area 11 | DIM data | 11.09 | 9.73 | 10.74 | 5.52 | 11.62 | 7.43 |
| ALS data | 0.75 | 1.7 | 1.18 | - | - | - | |
| Rarefied DIM data | 7.4 | 18.68 | 11.06 | 4.92 | 19.48 | 10.03 | |
| Area 32 | DIM data | 12.52 | 6.2 | 9.94 | 3.03 | 7.3 | 5.08 |
| ALS data | 8.06 | 0.73 | 4.26 | - | - | - | |
| Rarefied DIM data | 9.6 | 10.4 | 9.96 | 3.37 | 11.6 | 7.53 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Cui, X.; Zhang, L.; Ai, H. An Improved Progressive TIN Densification Filtering Method Considering the Density and Standard Variance of Point Clouds. ISPRS Int. J. Geo-Inf. 2018, 7, 409. https://doi.org/10.3390/ijgi7100409
Dong Y, Cui X, Zhang L, Ai H. An Improved Progressive TIN Densification Filtering Method Considering the Density and Standard Variance of Point Clouds. ISPRS International Journal of Geo-Information. 2018; 7(10):409. https://doi.org/10.3390/ijgi7100409
Chicago/Turabian StyleDong, Youqiang, Ximin Cui, Li Zhang, and Haibin Ai. 2018. "An Improved Progressive TIN Densification Filtering Method Considering the Density and Standard Variance of Point Clouds" ISPRS International Journal of Geo-Information 7, no. 10: 409. https://doi.org/10.3390/ijgi7100409