
Smart Helmet-Based Proximity Warning System to Improve Occupational Safety on the Road Using Image Sensor and Artificial Intelligence

Abstract
:1. Introduction
2. Methodology
2.1. Materials and Methods
2.1.1. Development of BLE Transmitter Using ESP32-CAM
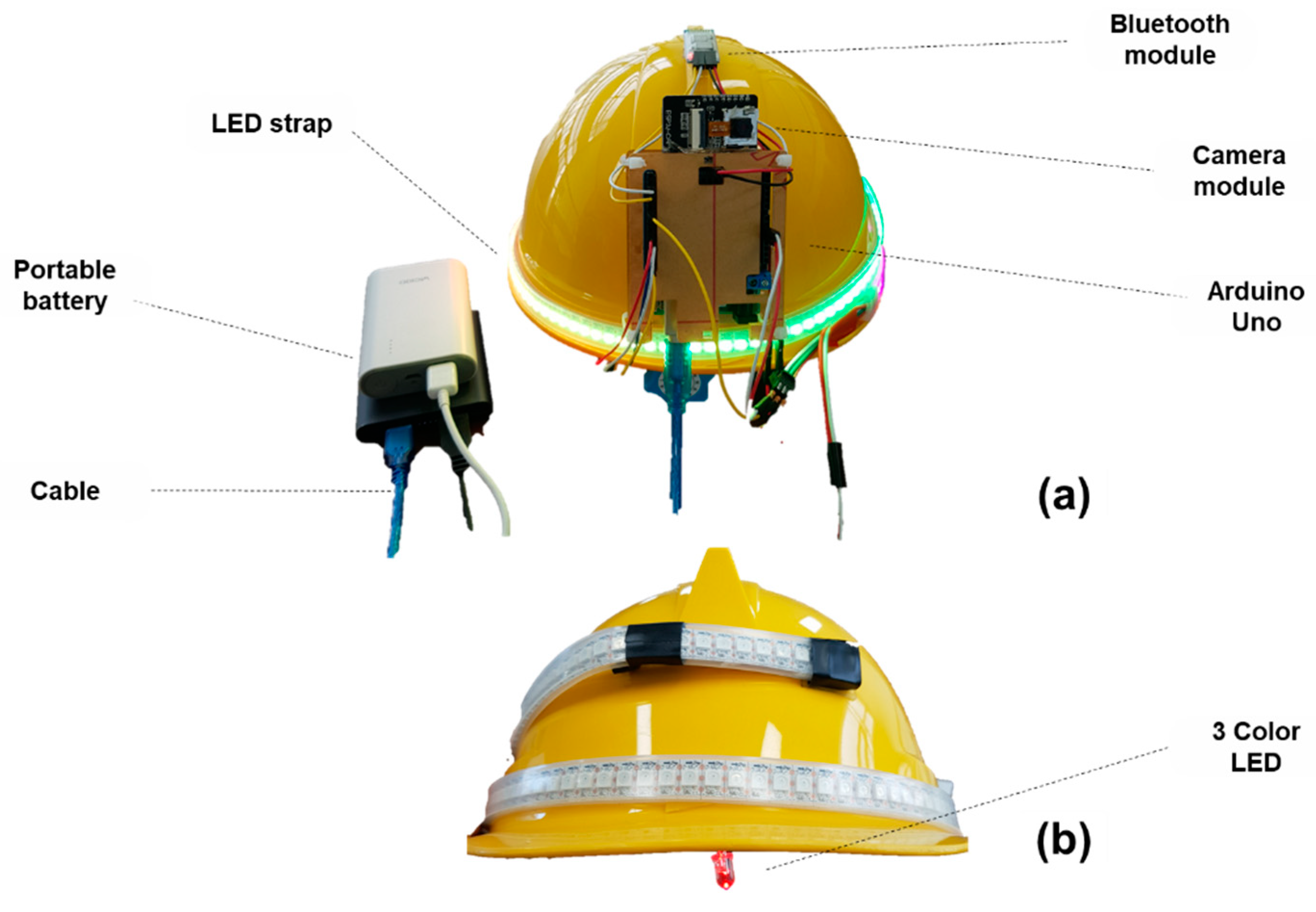
2.1.2. Development of Receiver
- (a)
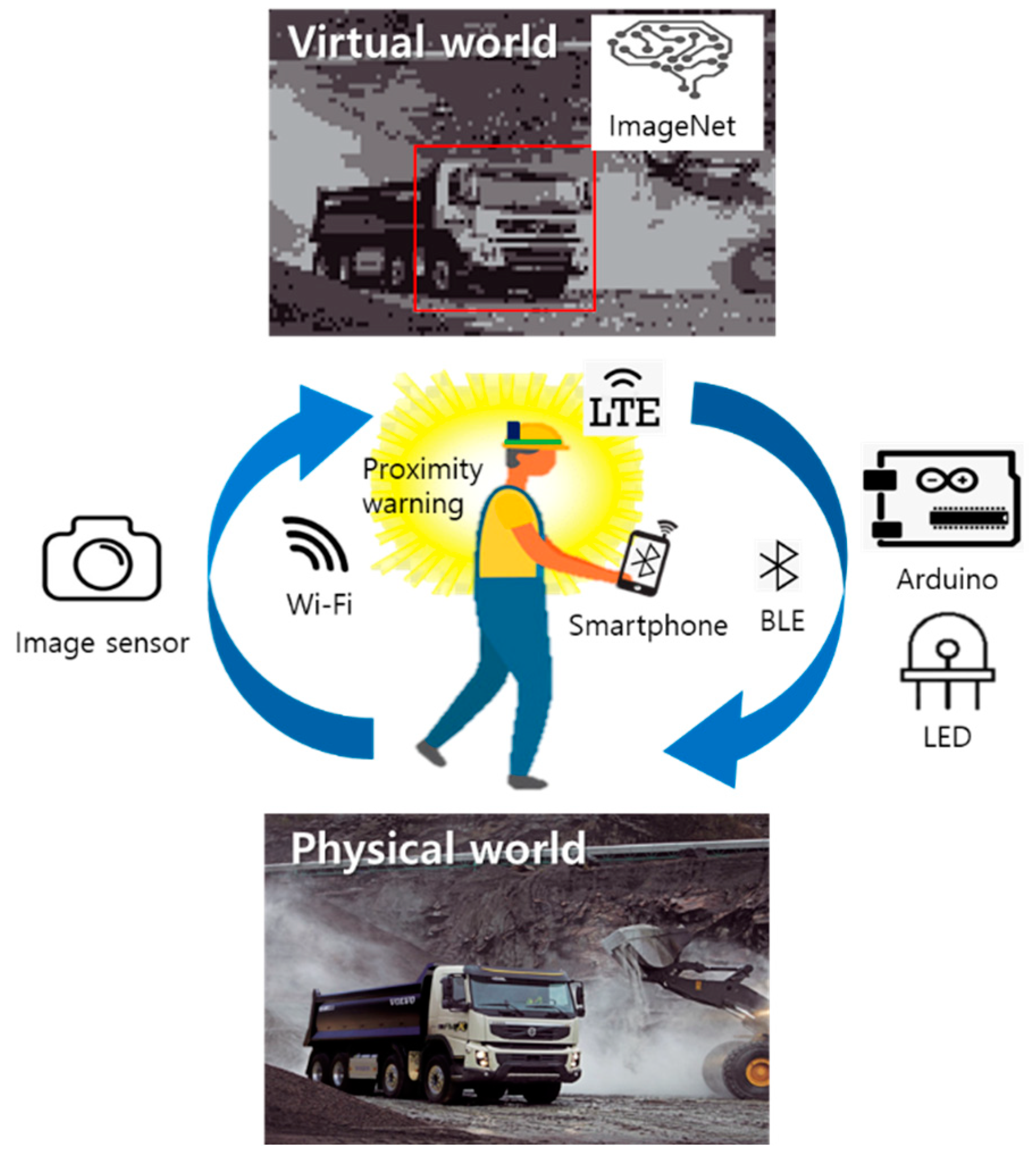
- The video captured by the ESP32-CAM is loaded onto the smartphone via Wi-Fi. The acquired video is saved as JPG images in real time, and the saved images are converted into Base64 code using the smartphone app.
- (b)
- The converted code is sent to the public AI open API server via HTTP and analyzed using the object detection learning model.
- (c)
- When the processing for object detection is completed on the server, the analyzed information is returned as java script object notation (JSON) text data via an HTTP response message to the AI Smart Helmet PWS.
- (d)
- An analysis is performed on the smartphone to determine whether the object information sent from the server contains any user-set hazardous objects. If such an object is detected, it is enclosed by a red box, and its name is displayed on the smartphone.
- (e)
- When a hazardous object enters the hazard area, the smartphone sends a Bluetooth signal to the smart helmet, which turns on the LED strip and three-color LED and vibrates the smartphone to provide a hazard warning.
2.1.3. Recognition Distance Experiment According to Input Minimum Diagonal Length
2.2. Experimental Measurement of Hazard Warning Accuracy
3. Results
4. Discussion
4.1. Acceptability of Developed AI Smart Helmet-Based Personal PWS in the Field
4.2. Advantages of Developed AI Smart Helmet-Based Personal PWS
4.3. Limitations of Current Work and Future Research
- Wearing comfort: Owing to the various sensors and microcontroller, it is relatively heavy compared to conventional hard hats. This can cause discomfort to motorcyclists and field workers. For the developed helmet to function as a wearable device, its weight must be reduced by using lightweight materials and components.
- Human health and safety: Given that the developed AI smart helmet is worn on the head, the effects of electromagnetic fields emitted from sensors or microcontrollers on human health should be investigated.
- Durability: Workers who wear AI smart helmets often work in very dusty and humid environments. Given that the microcontroller and camera module are exposed on the outside of the AI smart helmet, they are potentially vulnerable to the associated conditions. Research on the enhancement of the AI smart helmet’s durability is necessary to improve functionality even in poor work environments.
- Accuracy: Depending on the camera module’s field of view, the developed AI smart helmet may not yield high accuracy. As such, to mitigate this issue caused by the camera module’s restricted field of view, research on the synthesis and analysis of image information from not one but multiple camera modules is needed.
- Privacy and data security: The developed AI smart helmet collects a variety of information from the images of the attached camera module. However, this information can sometimes lead to privacy issues. For example, it is possible that unauthorized users may intercept information acquired by the AI smart helmet. Accordingly, continuous research on privacy and data security issues related to the use of this device is necessary.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- U.S. Bureau of Labor Statistics. Available online: https://www.bls.gov/iif/oshwc/cfoi/cftb0313.htm (accessed on 23 November 2021).
- Department of Mines, Industry Regulation and Safety. Government of Western Australia. Available online: http://www.dmp.wa.gov.au/Documents/Safety/MSH_R_VehicleCollisions.pdf (accessed on 23 November 2021).
- Ruff, T.M. Recommendations for Evaluating and Implementing Proximity Warning Systems on Surface Mining Equipment. Available online: https://www.cdc.gov/niosh/mining/UserFiles/works/pdfs/2007-146.pdf (accessed on 23 November 2021).
- Ruff, T.M. Overview of Proximity Warning Technology and Approaches. Available online: https://www.cdc.gov/niosh/mining/UserFiles/workshops/proximityworkshop2010/Ruff-NIOSH-PDWorkshop2010-508.pdf (accessed on 28 June 2022).
- Ruff, T.M. Test Results of Collision Warning Systems for Surface Mining Dump Trucks. Available online: https://www.cdc.gov/niosh/mining/userfiles/works/pdfs/ri9652.pdf (accessed on 23 November 2021).
- Ruff, T.M. Test Results of Collision Warning Systems for Surface Mining Dump Truck: Phase 2. Available online: https://www.cdc.gov/niosh/mining/UserFiles/works/pdfs/2001-100.pdf (accessed on 28 June 2022).
- Ruff, T.M.; Hession-Kunz, D. Application of Radio-Frequency Identification Systems to Collision Avoidance in Metal/Nonmetal Mines. IEEE Trans. Ind. Appl. 2001, 37, 112–116. [Google Scholar] [CrossRef]
- Schiffbauer, W.H. An Active Proximity Warning System for Surface and Underground Mining Applications. Miner. Eng. 2002, 54, 40–48. [Google Scholar]
- Ruff, T.M. Recommendations for Testing Radar-Based Collision Warning Systems on Heavy Equipment. Available online: https://www.cdc.gov/niosh/mining/UserFiles/works/pdfs/ri9657.pdf (accessed on 28 June 2022).
- Ruff, T.M.; Holden, T.P. Preventing Collisions Involving Surface Mining Equipment: A GPS-Based Approach. J. Saf. Res. 2003, 34, 175–181. [Google Scholar] [CrossRef] [PubMed]
- Ruff, T.M. Advances in Proximity Detection Technologies for Surface; Ann Institute on Mining Health, Safety and Research: Salt Lake City, UT, USA, 2004. [Google Scholar]
- Ruff, T.M. Evaluation of a radar-based proximity warning system for off-highway dump trucks. Accid. Anal. Prev. 2006, 38, 92–98. [Google Scholar] [CrossRef] [PubMed]
- Baek, J.; Choi, Y. Bluetooth-Beacon-Based Underground Proximity Warning System for Preventing Collisions inside Tunnels. Appl. Sci. 2018, 8, 2271. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.; Suh, J.; Baek, J.; Choi, Y. Review of Collision Avoidance Systems for Mine Safety Management: Development Status and Applications. Tunn. Undergr. Space 2017, 27, 282–294. [Google Scholar] [CrossRef]
- Kim, Y.; Baek, J.; Choi, Y. Smart Helmet-Based Personnel Proximity Warning System for Improving Underground Mine Safety. Appl. Sci. 2021, 11, 4342. [Google Scholar] [CrossRef]
- ELOshield by ELOKON. Available online: https://www.elokon.com/en-EN/intralogistics/eloshield-proximity-detection.html (accessed on 23 November 2021).
- Joy Smartzone Proximity System. Available online: https://mining.komatsu/technology/proximity-detection/smartzoneproximity-detection (accessed on 23 November 2021).
- Smartzone Proximity System by JoyGlobal. Available online: https://mining.komatsu/docs/default-source/non-productdocuments/technology/proximity-detection/smartzone-pamphlet.pdf?sfvrsn=56060a6b_46 (accessed on 23 November 2021).
- Proximity Detection for Underground Coal Mines. Available online: https://www.strataworldwide.com/sites/default/files/platform/brochure/StrataProximity-Coal-Mining-US_2018.pdf (accessed on 23 November 2021).
- Jobes, C.; Carr, J.; DuCarme, J. Evaluation of an advanced proximity detection system for continuous mining machines. Int. J. Appl. Eng. Res. 2012, 7, 649–671. [Google Scholar]
- Proximity Detection System by NAUTILUS International. Available online: http://www.nautilus-intl.com/proximity-detection/nautilus-coal-buddy-operators-proximity-detection-system-for-underground-coal-mines-operating-in-an-explosive-methanegas-environment-class-i-div-ii/ (accessed on 7 April 2021).
- Proximity Warning System by Sensorzone. Available online: https://globalsurvey.co.nz/wp-content/uploads/2016/06/A4-Brochure-final.pdf (accessed on 23 November 2021).
- SiteZone PWS. Available online: https://proximitywarning.com/product-services/sitezone-proximity-warning-system/ (accessed on 23 November 2021).
- Hines, K.P. Exploration of Alerting Methods on Vest-Worn Systems. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2016. [Google Scholar]
- Sakhakarmi, S.; Park, J.; Singh, A. Tactile-based wearable system for improved hazard perception of worker and equipment collision. Autom. Constr. 2021, 125, 103613. [Google Scholar] [CrossRef]
- Baek, J.; Choi, Y. Smart Glasses-Based Personnel Proximity Warning System for Improving Pedestrian Safety in Construction and Mining Sites. Int. J. Environ. Res. Public Health 2020, 17, 1422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- ESP 32-CAM Specification. Available online: https://randomnerdtutorials.com/esp32-cam-troubleshooting-guide/ (accessed on 23 November 2021).
- ETRI. Public AI open API platform. Available online: https://aiopen.etri.re.kr (accessed on 23 November 2021).
- Bae, S.H.; Lee, Y.; Jo, Y.; Bae, Y.; Hwang, J.W. Rank of experts: Detection network ensemble. arXiv 2017, arXiv:1712.00185. Available online: https://arxiv.org/abs/1712.00185 (accessed on 1 December 2022).
- Arduino UNO Board Specification. Available online: https://store.arduino.cc/usa/arduino-uno-rev3 (accessed on 23 November 2021).
- HC-06 Bluetooth Module Specification. Available online: https://www.etechnophiles.com/hc06-pinout-specifications-datasheet/ (accessed on 23 November 2021).
- Jobes, C.; Carr, J.; DuCarme, J.; Patts, J. Determining Proximity Warning and Action Zones for a Magnetic Proximity Detection System. In Proceedings of the 2011 IEEE Industry Applications Society Annual Meeting, Orlando, FL, USA, 9–13 October 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Brent, A.R.; Audric, T.; Nicholas, B. An Analysis of Global Positioning System (GPS) Standard Positioning System (SPS) Performance for 2017. Available online: https://www.gps.gov/systems/gps/performance/2017-GPS-SPS-performance-analysis.pdf (accessed on 28 June 2022).
- Dunn, M.; Hargrave, C.; Vowles, M. Proximity Detection Device Interoperability. Available online: https://publications.csiro.au/rpr/download?pid=csiro:EP178511&dsid=DS1 (accessed on 28 June 2022).
- Cheatham, B.; Javanmardian, K.; Samandari, H. Confronting the Risks of Artificial Intelligence. Available online: https://www.mckinsey.com/capabilities/quantumblack/our-insights/confronting-the-risks-of-artificial-intelligence (accessed on 1 December 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensing Technology | Frequency | Detection Range |
|---|---|---|
| Electromagnetic | 70–140 kHz | 10 m |
| Radar RFID | 2.4 GHz | 20–50 m |
| Ultra-High Frequency RFID | 433 MHz, 860–960 MHz | 20–100 m |
| Very Low Frequency RFID | <15 kHz | 20–100 m |
| Wi-Fi | 2.4 GHz | 20–100 m |
| Bluetooth Low Energy | 2.4 GHz | 20–100 m |
| Signal Receive Distance (m) | Minimum Diagonal Length | ||||
|---|---|---|---|---|---|
| 25 Pixel | 50 Pixel | 75 Pixel | 100 Pixel | 125 Pixel | |
| Mean | 63.25 | 24 | 14.25 | 11 | 6.25 |
| STD 1 | 1.21 | 2.11 | 2.37 | 2.11 | 2.12 |
| Max 2 | 65 | 27.5 | 17.5 | 15 | 10 |
| Min 3 | 62.5 | 20 | 10 | 7.5 | 2.5 |
| Type of Warning Alert | Angle between the Mining Equipment and the Pedestrian | ||
|---|---|---|---|
| 0° | 15° | 30° | |
| Trials | 10 | 10 | 10 |
| True positives | 10 | 10 | 8 |
| False negatives | 0 | 0 | 2 |
| Recall (%) | 100 | 100 | 80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Choi, Y. Smart Helmet-Based Proximity Warning System to Improve Occupational Safety on the Road Using Image Sensor and Artificial Intelligence. Int. J. Environ. Res. Public Health 2022, 19, 16312. https://doi.org/10.3390/ijerph192316312
Kim Y, Choi Y. Smart Helmet-Based Proximity Warning System to Improve Occupational Safety on the Road Using Image Sensor and Artificial Intelligence. International Journal of Environmental Research and Public Health. 2022; 19(23):16312. https://doi.org/10.3390/ijerph192316312
Chicago/Turabian StyleKim, Yeanjae, and Yosoon Choi. 2022. "Smart Helmet-Based Proximity Warning System to Improve Occupational Safety on the Road Using Image Sensor and Artificial Intelligence" International Journal of Environmental Research and Public Health 19, no. 23: 16312. https://doi.org/10.3390/ijerph192316312