
Communicationless Overcurrent Relays Coordination for Active Distribution Network Considering Fault Repairing Periods

 ,
,  ,
, 

Abstract
:1. Introduction
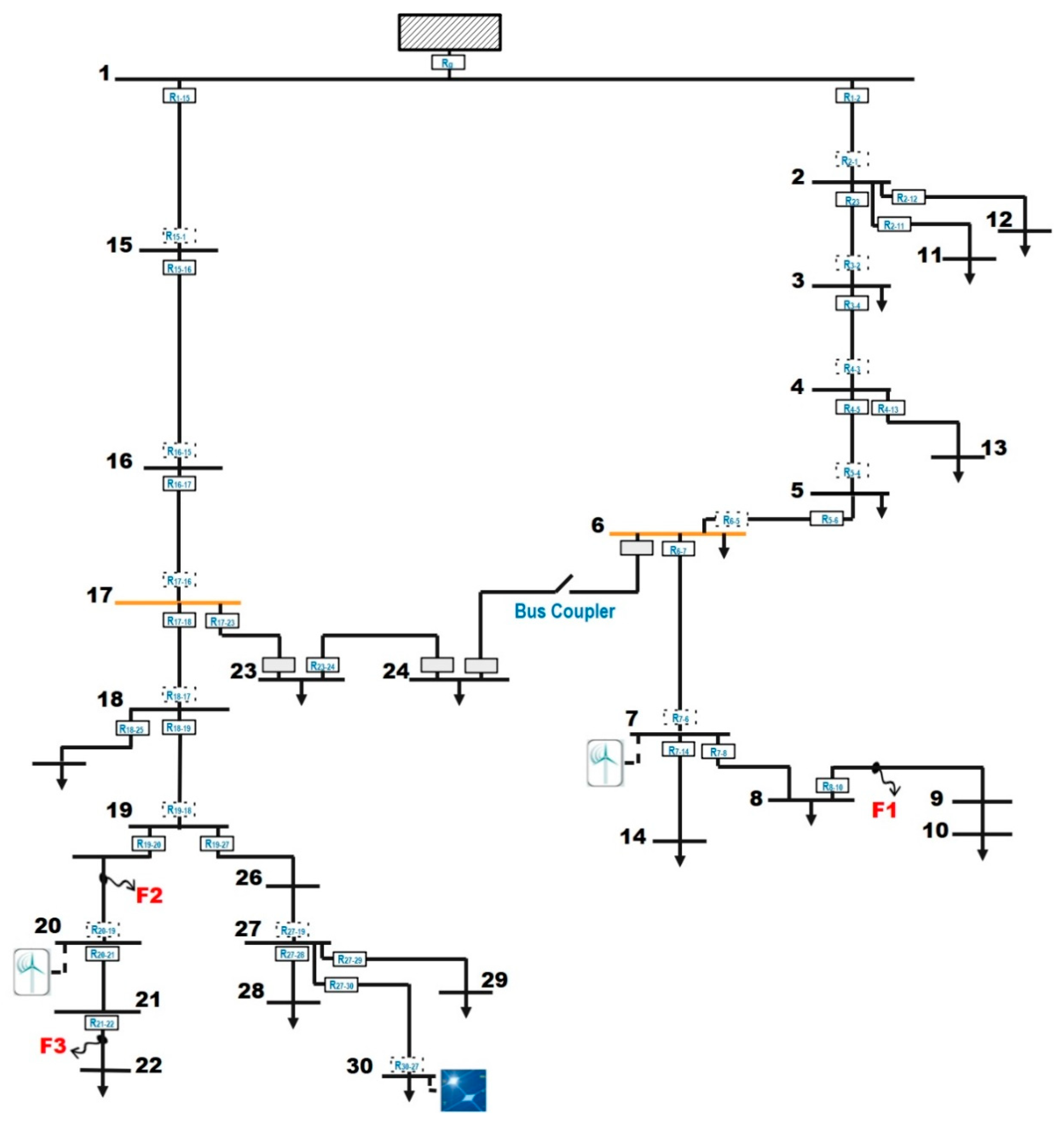
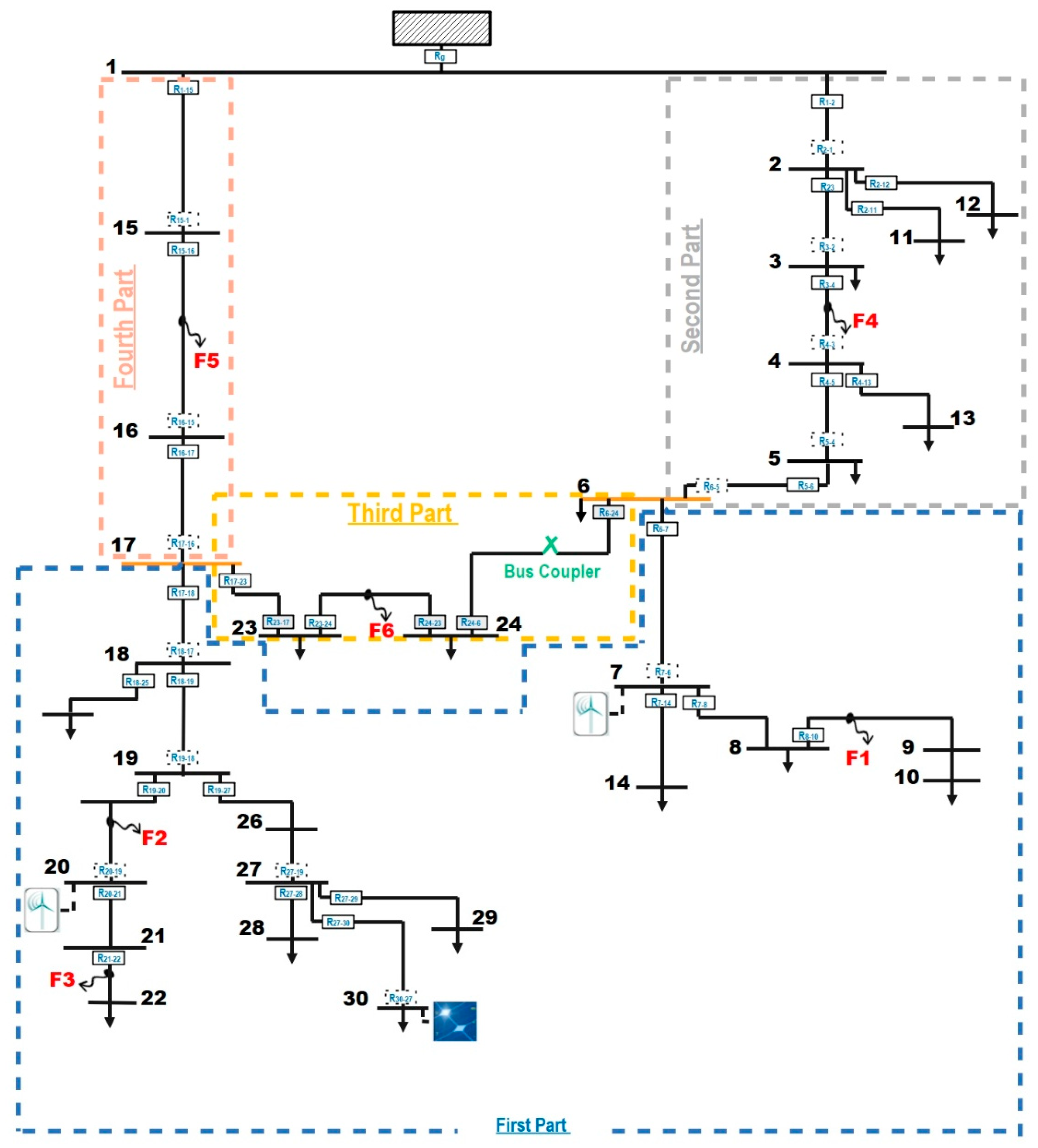
2. Test System
3. Optimal Allocation of Distributed Generation Units
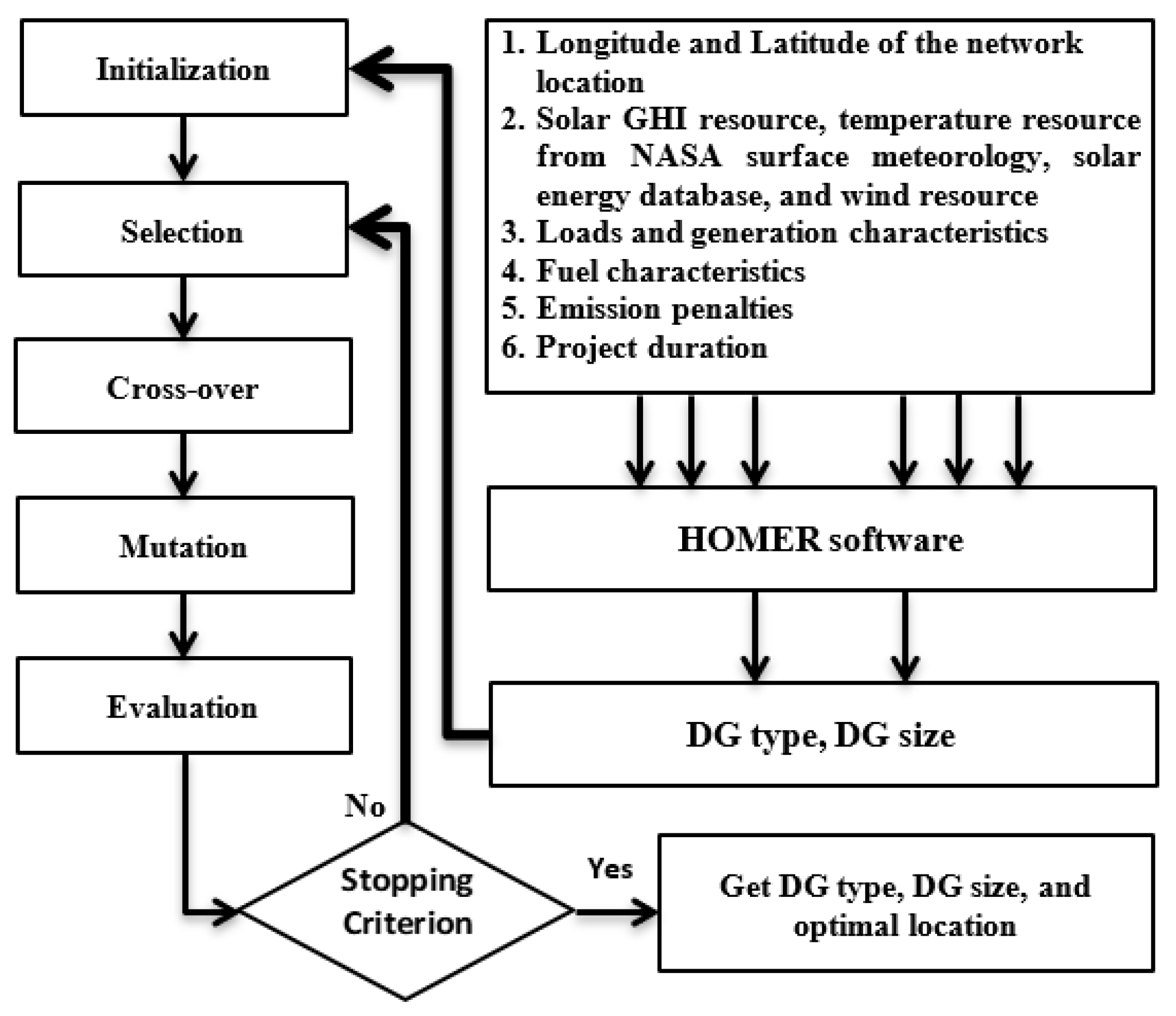
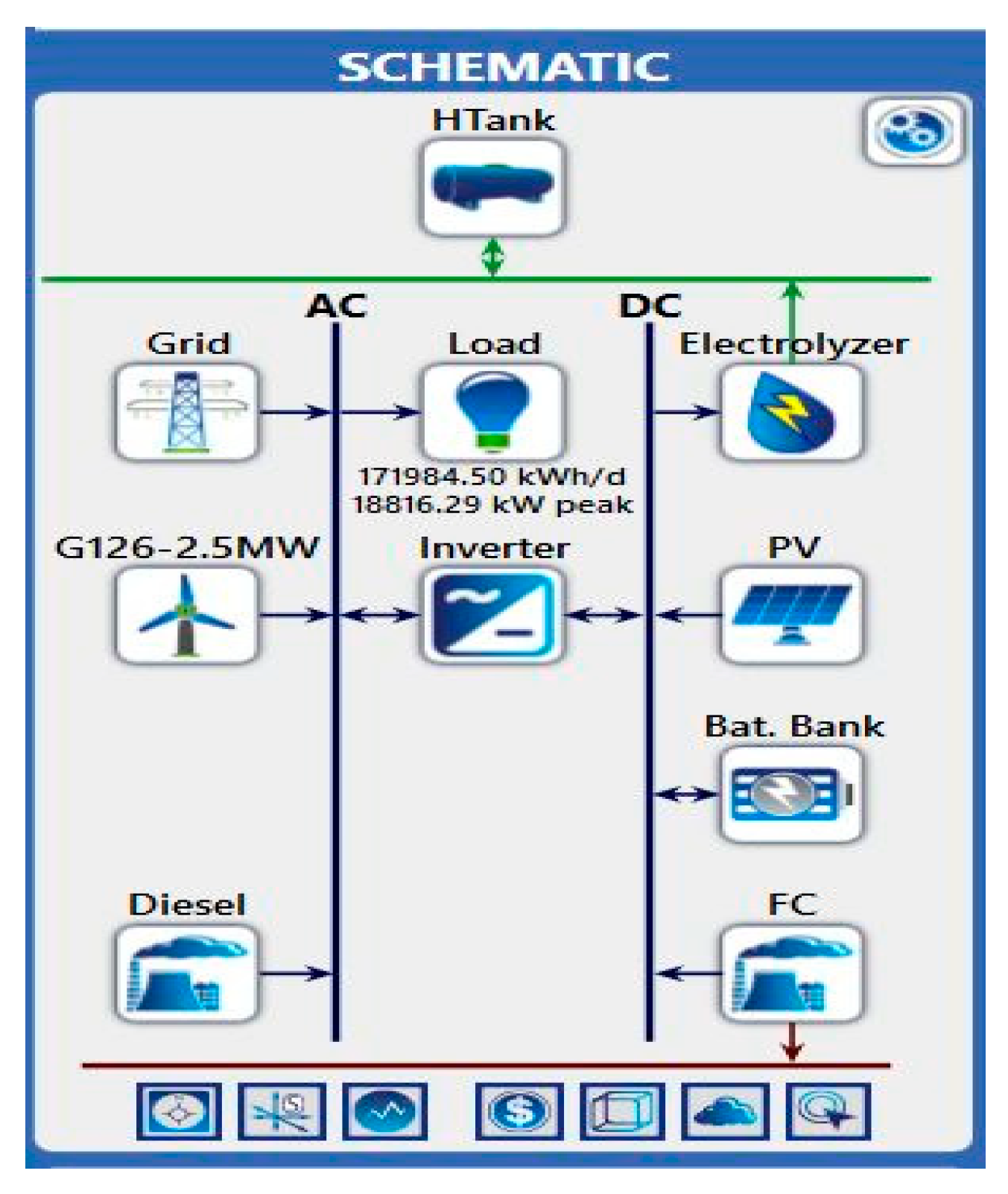
3.1. HOMER-Based Model for Selecting Suitable DGs and DG Sizing
- is the cost of energy used from the grid ($).
- is the photovoltaic arrangement cost ($).
- is the wind turbine cost ($).
- is the diesel generator cost ($).
- is the fuel cell cost ($).
- is the battery bank cost ($).
- is the cost of the inverter ($).
- is the cost of energy delivered to the grid ($).
- is the number of inserted DG.
- is the capital cost of DG ($).
- is the operation and maintenance cost of DG ($).
- is the number of replacements for DG.
- is the replacement cost of DG ($).
- is the salvage amount of DG ($).
- is the output power of DG (kW).
- is the grid power (kW).
- is the load demand (kW).
- Obtaining the longitude and latitude of the network location.
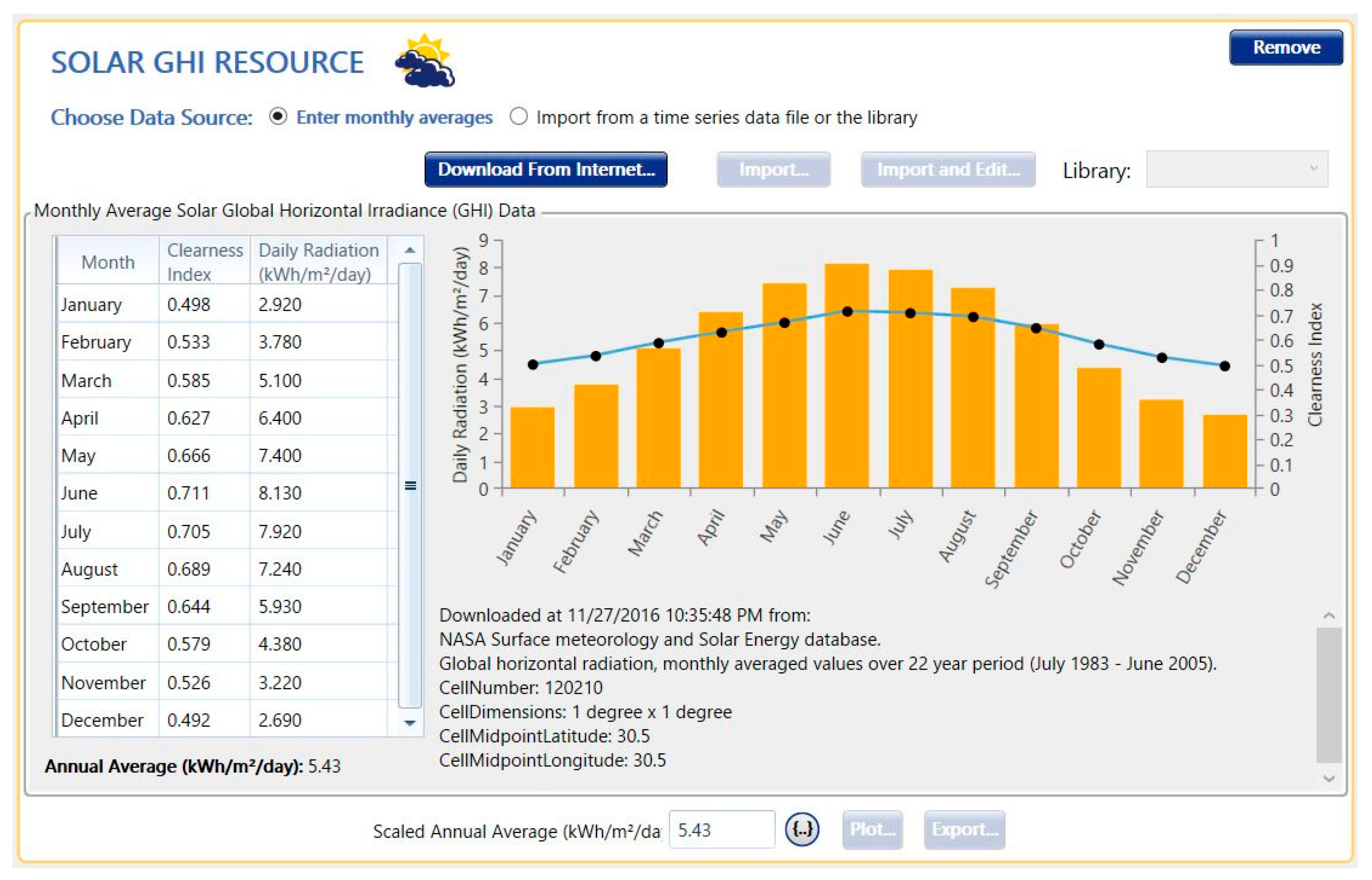
- Downloading the Solar Global Horizontal Irradiance (GHI) resource, temperature resource from NASA surface meteorology, solar energy database, and wind resource [27].
- Adding the characteristics of both loads and generation.
- Defining the fuel characteristics, the emission penalties, and finally the project duration.
- The grid power price and grid sellback price are 0.087 $/kWh.
- The solar system is composed of stationary flat-plate PV with a lifetime of 25 years and an 80% derating factor. The maximum available space for PV is 1000 kW, obtained by utilizing the ready area to install a PV substation at the studied network location, where each kW requires a minimum area of 10 m2. The Solar Global Horizontal Irradiance (GHI) resource is depicted in Figure 3.
- A diesel generator with a maximum available space of 1000 kW is utilized; however, the price of diesel fuel is 299 × 10−3 $/L.
- A general fuel cell with a maximum available area of 100 kW is utilized, where hydrogen is used as fuel. The electrolyzer and hydrogen tank are utilized to supply the fuel cell with the hydrogen needed to operate.
- A battery bank, modified kinetic battery model, with a voltage of 2 V and a capacity of 1 kWh using a maximum available area of 30 batteries is utilized.
- Carbon dioxide needs to be removed from the atmosphere [29].
3.2. GA-Based Model for DG Siting
- is the active power loss of branch k.
- BIBC is the Bus-Injection to Branch-Current matrix.
- nl is the number of distribution system branches.
- nb is the number of the distribution system buses.
- j is the voltage magnitude at bus j.
- j is the voltage angle at bus j.
- j is the net consumed active power at bus j.
- j is the net consumed reactive power at bus j.
4. Conventional Overcurrent Relays Coordination
4.1. The Procedure of the Conventional Coordination
4.2. The Effect of DGs Presence on the Conventional Coordination
5. Modified Overcurrent Relays Coordination for Distribution Systems with Distributed Generation Units
5.1. Coordination of Forward Relays
5.2. Coordination of Backward Relays
5.3. The Evaluation of the Modified Coordination under Opening Bus Coupler
6. New Communicationless Overcurrent Relays Coordination Approach for Deregulated Distribution System Considering Fault Repairing Periods
6.1. The Concept of the Proposed Communicationless Overcurrent Relays Coordination
6.2. Procedure for New Coordination Approach Computation
7. New Protection Coordination Approach Evaluation
- Under faults associated with normal configuration, the operating time (top) of relay R2-3 is greater than that of relay R3-4 by a difference equal to or greater than CTI, as shown in Table 16.
- With the insertion of DGs, the top of relay R2-3 is greater than that of relay R3-4 by a difference equal to or greater than CTI. Additionally, the top of backward relay R5-4 is greater than that of relay R4-3 by a difference equal to or greater than CTI, as shown in Table 16.
- With section 1-2 disconnected, the BC connected, and DGs connected, the top of relay R5-4 is greater than that of relay R4-3 by a difference equal to or greater than CTI, as shown in Table 16.
- With section 1-15 disconnected, BC connected, and DGs connected, the top of relay R2-3 is greater than that of relay R3-4 by a difference equal to or greater than CTI. Simultaneously, the top of backward relay R5-4 is greater than that of relay R4-3 by a difference equal to or greater than CTI, as shown in Table 16.
- In faults associated with normal configuration, the top of relay R1-15 is greater than that of relay R15-16 by a difference equal to or greater than CTI, as shown in Table 16.
- With the insertion of DGs, the top of relay R1-15 is greater than that of relay R15-16 by a difference equal to or greater than CTI. Simultaneously, the top of backward relay R17-16 is greater than that of relay R16-15 by a difference equal to or greater than CTI, as shown in Table 16.
- With section 1-2 disconnected, BC connected, and DGs connected, the top of relay R1-15 is greater than that of relay R15-16 by a difference equal to or greater than CTI. Simultaneously, the top of backward relay R17-16 is greater than that of relay R16-15 by a difference equal to or greater than CTI, as shown in Table 16.
- With section 1-15 disconnected, BC connected, and DGs connected, the top of relay R17-16 is greater than that of relay R16-15 by a difference equal to or greater than CTI, as shown in Table 16.
- In faults associated with normal configuration, the top of relay R17-23 is greater than that of relay R23-24 by a difference equal to or greater than CTI, as shown in Table 16.
- With the insertion of DGs, the top of relay R17-23 is greater than that of relay R23-24 by a difference equal to or greater than CTI, as shown in Table 16.
- When section 1-2 is disconnected, the BC is connected, and DGs are connected, the top of Relay R17-23 is more than that of relay R23-24 by a difference equal to or more than CTI On the other hand, the backward relays did not sense the fault current because the fault current value is lower than the corresponding pickup currents at these relays. This insensitivity problem is overcome by the presented idea illustrated in the previous section where the relays R23-24 and R6-24 sense this fault F6 and then the ratio of current multiplier setting is activated to be 6.5. As declared in the shaded cells in Table 16, the top of relay R23-24 is more than that of relay R6-24 by a difference equal to or more than CTI. Fortunately, the remote backup relay R7-6 senses the fault and clears it under the failure case of both the primary and the local backup relays.
- With section 1-2 disconnected, BC connected, and DGs connected, the top of Relay R17-23 is greater than that of relay R23-24 by a difference equal to or greater than CTI. However, the backward relays did not detect the fault current as it was lower than the corresponding pickup currents for these relays. This insensitivity issue is resolved through the presented concept outlined in the previous section, where relays R23-24 and R6-24 detect this fault F6 and then activate a current multiplier setting ratio of 6.5. As indicated in the shaded cells of Table 16, the top of relay R23-24 is greater than that of relay R6-24 by a difference equal to or greater than CTI. Fortunately, the remote backup relay R7-6 detects the fault and clears it in the event of failure of both the primary and local backup relays.
- With section 1-15 disconnected, BC connected, and DGs connected, the top of relay R17-23 is greater than that of relay R23-24 by a difference equal to or greater than CTI. Simultaneously, the top of backward relay R6-24 is greater than that of relay R24-23 by a difference equal to or greater than CTI, as shown in Table 16.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Armored Aluminum Conductor | |||||
|---|---|---|---|---|---|
| Section | Cross Section | Current Rating In Ground at 25 °C (Amp) | Resistance 50 Hz at 90 °C (Ω\Km) | Reactance at 50 Hz (Ω\Km) | Capacitance B (mhos/km) × 10−6 |
| 1-2 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 2-11 | 3 × 240 | 342 | 0.161 | 0.089 | 150.79645 |
| 2-12 | 3 × 240 | 342 | 0.161 | 0.089 | 150.79645 |
| 2-3 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 3-4 | 3 × 240 | 342 | 0.161 | 0.089 | 150.79645 |
| 4-5 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 4-13 | 3 × 240 | 342 | 0.161 | 0.089 | 150.79645 |
| 5-6 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 6-7 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 6-24 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 7-8 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 8-9 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 9-10 | 3 × 150 | 270 | 0.265 | 0.094 | 125.66371 |
| 7-14 | 3 × 70 | 176 | 0.568 | 0.106 | 94.24778 |
| 1-15 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 15-16 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 16-17 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 17-18 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 17-23 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 23-24 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 18-19 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 18-25 | 3 × 70 | 176 | 0.568 | 0.106 | 94.24778 |
| 19-20 | 3 × 70 | 176 | 0.568 | 0.106 | 94.24778 |
| 20-21 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 21-22 | 3 × 70 | 176 | 0.568 | 0.106 | 94.24778 |
| 19-26 | 3 × (1 × 240) | 374 | 0.161 | 0.099 | 153.938 |
| 26-27 | 3 × 240 | 342 | 0.161 | 0.089 | 150.79645 |
| 27-28 | 3 × 70 | 176 | 0.568 | 0.106 | 94.24778 |
| 27-29 | 3 × 70 | 176 | 0.568 | 0.106 | 94.24778 |
| 27-30 | 3 × 70 | 176 | 0.568 | 0.106 | 94.24778 |
| Busbar Number | Active Power (MW) | Reactive Power (MVAR) |
|---|---|---|
| 12 | 0.4125 | 0.363790805 |
| 11 | 0.44 | 0.33 |
| 3 | 0.4235 | 0.350924137 |
| 13 | 0.3905 | 0.387310922 |
| 5 | 0.451 | 0.314799936 |
| 6 | 0.297 | 0.143843665 |
| 24 | 0.4675 | 0.289730478 |
| 23 | 0.396 | 0.381685735 |
| 14 | 0.847 | 0.701848274 |
| 8 | 0.4125 | 0.363790805 |
| 10 | 0.825 | 0.727581611 |
| 29 | 0.429 | 0.344178733 |
| 28 | 0.4345 | 0.337208763 |
| 30 | 0.4455 | 0.322536432 |
| 20 | 0.88 | 0.66 |
| 21 | 0.902 | 0.629599873 |
| 22 | 0.297 | 0.143843665 |
| 25 | 0.4235 | 0.350924137 |
| 16 | 0.44 | 0.33 |
| 15 | 0.44 | 0.33 |
References
- Esmail, E.; Elgamasy, M.; Elkalashy, N.; Elsadd, M. Detection and experimental investigation of open conductor and single-phase earth return faults in distribution systems. Int. J. Electr. Power Energy Syst. 2022, 140, 1080–1089. [Google Scholar] [CrossRef]
- Gómez-Luna, E.; Candelo-Becerra, J.; Vasquez, J. A New Digital Twins-Based Overcurrent Protection Scheme for Distributed Energy Resources Integrated Distribution Networks. Energies 2023, 16, 5545. [Google Scholar] [CrossRef]
- Guerraiche, K.; Dekhici, L.; Chatelet, E.; Zeblah, A. Techno-Economic Green Optimization of Electrical Microgrid Using Swarm Metaheuristics. Energies 2023, 16, 1803. [Google Scholar] [CrossRef]
- Tavarov, S.S.; Sidorov, A.; Čonka, Z.; Safaraliev, M.; Matrenin, P.; Senyuk, M.; Beryozkina, S.; Zicmane, I. Control of Operational Modes of an Urban Distribution Grid under Conditions of Uncertainty. Energies 2023, 16, 3497. [Google Scholar] [CrossRef]
- Nadeem, T.B.; Siddiqui, M.; Khalid, M.; Asif, M. Distributed energy systems: A review of classification, technologies, applications, and policies. Energy Strategy Rev. 2023, 48, 101096. [Google Scholar] [CrossRef]
- Electric Power Research Institute Webpage. April 2008. Available online: https://www.epri.com/gg/newgen/disgen/index.html (accessed on 20 July 2023).
- Gas Research Institute. Distributed Power Generation: A Strategy for a Competitive Energy Industry; Gas Research Institute: Chicago, IL, USA, 1998. [Google Scholar]
- Nogueira, W.C.; Garcés Negrete, L.P.; López-Lezama, J.M. Optimal Allocation and Sizing of Distributed Generation Using Interval Power Flow. Sustainability 2023, 15, 5171. [Google Scholar] [CrossRef]
- Majeed, A.A.; Altaie, A.S.; Abderrahim, M.; Alkhazraji, A. A Review of Protection Schemes for Electrical Distribution Networks with Green Distributed Generation. Energies 2023, 16, 7587. [Google Scholar] [CrossRef]
- Sharaf, H.M.; Zeineldin, H.H.; Ibrahim, D.K.; EL-Zahab, E.E.A. A proposed coordination strategy for meshed distribution systems with DG considering user-defined characteristics of directional inverse time overcurrent relays. Int. J. Electr. Power Energy Syst. 2015, 65, 49–58. [Google Scholar] [CrossRef]
- Zeineldin, H.H.; Mohamed, Y.A.-R.I.; Khadkikar, V.; Pandi, V.R. A protection coordination index for evaluating distributed generation. impacts on protection for meshed distribution systems. IEEE Trans. Smart Grid 2013, 4, 1523–1532. [Google Scholar] [CrossRef]
- Tjahjono, A.; Anggriawan, D.; Faizin, A.; Priyadi, A.; Pujiantara, M.; Taufik, T.; Purnomo, M. Adaptive modified firefly algorithm for optimal coordination of overcurrent relays. IET Gener. Transm. Distrib. 2017, 11, 2575–2585. [Google Scholar] [CrossRef]
- Lim, S.; Kim, J.; Kim, M.; Kim, J. Improvement of protection coordination of protective devices through application of a SFCL in a power distribution system with a dispersed generation. IEEE Trans. Appl. Supercond. 2012, 22, 5601004. [Google Scholar]
- Kim, Y.; Jo, H.; Joo, S. Analysis of impacts of superconducting fault current limiter (SFCL) placement on distributed generation (DG) expansion. IEEE Trans. Appl. Supercond. 2016, 26, 5602305. [Google Scholar] [CrossRef]
- Ibrahim, D.K.; EL-Zahab, E.E.A.; Mostafa, S.A. New coordination approach to minimize the number of re-adjusted relays when adding DGs in interconnected power systems with a minimum value of fault current limiter. Int. J. Electr. Power Energy Syst. 2017, 85, 32–41. [Google Scholar] [CrossRef]
- Shih, M.Y.; Conde, A.; Leonowicz, Z.; Martirano, L. An adaptive overcurrent coordination scheme to improve relay sensitivity and overcome drawbacks due to distributed generation in smart grids. IEEE Trans. Ind. Appl. 2017, 53, 5217–5228. [Google Scholar] [CrossRef]
- Wan, H.; Li, K.; Wong, K. An multi-agent approach to protection relay coordination with distributed generators in industrial power distribution system. In Proceedings of the Fourtieth IAS Annual Meeting. Conference Record of the 2005 Industry Application Conference, Hong Kong, China, 2–6 October 2005; Volume 2, pp. 830–836. [Google Scholar]
- Elsadd, M.A.; Kawady, T.A.; Taalab, A.M.I.; Elkalashy, N.I. Adaptive optimum coordination of overcurrent relays for deregulated distribution system considering parallel feeders. Electr. Eng. 2021, 103, 1849–1867. [Google Scholar] [CrossRef]
- Khalifa, L.S.; Elsadd, M.A.; Abd El-Aal, R.A.; El-Makkawy, S.M. Enhancing Recloser-Fuse Coordination Using Distributed Agents in Deregulated Distribution Systems. In Proceedings of the 2018 Twentieth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 18–20 December 2018; pp. 948–955. [Google Scholar] [CrossRef]
- Liu, Z.; Su, C.; Høidalen, H.K.; Chen, Z. A Multiagent System-Based Protection and Control Scheme for Distribution System with Distributed-Generation Integration. IEEE Trans. Power Deliv. 2017, 32, 536–545. [Google Scholar] [CrossRef]
- Sampaio, F.C.; Leao, R.P.; Sampaio, R.F.; Melo, L.S.; Barroso, G.C. A multi-agent-based integrated self-healing and adaptive protection system for power distribution systems with distributed generation. Electr. Power Syst. Res. 2020, 188, 106525. [Google Scholar] [CrossRef]
- Shirazi, E.; Jadid, S. A multiagent design for self-healing in electric power distribution systems. Electr. Power Syst. Res. 2019, 171, 230–239. [Google Scholar] [CrossRef]
- Uzair, M.; Li, L.; Zhu, J.G.; Eskandari, M. A protection scheme for AC microgrids based on multi-agent system combined with machine learning. In Proceedings of the 29th Australasian Universities Power Engineering Conference (AUPEC), Nadi, Fiji, 26–29 November 2019. [Google Scholar]
- Hojjaty, M.; Fani, B.; Sadeghkhani, I. Intelligent Protection Coordination Restoration Strategy for Active Distribution Networks. IET Renew. Power Gener. 2022, 16, 397–413. [Google Scholar] [CrossRef]
- HOMER® Pro User Manual. Available online: www.homerenergy.com (accessed on 20 July 2023).
- Hatata, A.Y.; Osman, G.; AlAdl, M.M. Design and Analysis of Wind Turbine/PV/Fuel Cell Hybrid Power System Using HOMER and Clonal Selection Algorithm. In Proceedings of the 2015 Seventeenth International Middle East Power Systems Conference (MEPCON), Mansoura, Egypt, 15–17 December 2015. [Google Scholar]
- NASA. Surface Meteorology and Solar Energy. Available online: https://eosweb.larc.nasa.gov/sse/ (accessed on 20 July 2023).
- Siemens. Gamesa Renewable Energy. Available online: https://www.siemensgamesa.com/en-int/products-and-services (accessed on 20 July 2023).
- Lu, Z.; Lu, C.; Feng, T.; Zhao, H. Carbon dioxide capture and storage planning considering emission trading system for a generation corporation under the emission reduction policy in China. IET Gener. Transm. Distrib. 2015, 9, 43–52. [Google Scholar] [CrossRef]
- Elsadd, M.A.; Yousef, W.; Abdelaziz, A.Y. New adaptive coordination approach between generator-transformer unit overall differential protection and generator capability curves. Int. J. Electr. Power Energy Syst. 2020, 118, 105788. [Google Scholar] [CrossRef]







| Component (Capacity/Quantity) | Capital Cost ($) | Replacement Cost ($) | Operation & Maintenance Cost ($) |
|---|---|---|---|
| PV (1 kW) | 0.9 × 103 | 0.9 × 103 | 0 |
| WT (2.5 MW) | 5.5 × 106 | 5.5 × 106 | 9 × 104/year |
| Diesel (1 kW) | 0.5 × 103 | 0.5 × 103 | 0.03/h |
| FC (1 kW) | 3 × 103 | 2.5 × 103 | 0.01/h |
| Battery (2 V) | 0.3 × 103 | 0.3 × 103 | 10/year |
| Electrolyzer (0.15 kW) | 0.6 × 103 | 0.6 × 103 | 2/year |
| Hydrogen Tank (1 kg) | 0.02 × 103 | 0.02 × 103 | 0.05/year |
| Items | Optimum Results | |
|---|---|---|
| Architecture | PV (kW) | 1000 |
| WT (G126—2.5 MW) | 2 | |
| Inverter (kW) | 680 | |
| Cost | COE ($/kWh) | 0.0861 |
| NPC ($) | 63 M | |
| Operating cost ($) | 4.39 M | |
| Initial capital ($) | 12.1 M | |
| System | Renewable fraction (%) | 33.6 |
| PV | Capital cost ($) | 900,000 |
| Production (kWh) | 1,540,204 | |
| WT (G126—2.5 MW) | Capital cost ($) | 11,000,000 |
| Production (kWh) | 19,717,122 | |
| O&M cost ($) | 180,000 | |
| Grid | Energy purchased (kWh) | 41,921,056 |
| Energy sold (kWh) | 361,485 | |
| No. of Pairs | Pair of Relays | IFmax (For Phase Faults) (A) | IFmax (For Earth Faults) (A) | |
|---|---|---|---|---|
| Backup | Primary | |||
| 1 | R7-8 | R8-10 | 4596.4 | 4133.6 |
| 2 | R6-7 | R7-8 | 4696.3 | 4266.2 |
| 3 | R6-7 | R7-14 | 4711.4 | 4286.2 |
| 4 | R5-6 | R6-7 | 4769.1 | 4365.6 |
| 5 | R4-5 | R5-6 | 4874.4 | 4512.9 |
| 6 | R3-4 | R4-5 | 4941.6 | 4608.8 |
| 7 | R3-4 | R4-13 | 4943.7 | 4612.3 |
| 8 | R2-3 | R3-4 | 4969.5 | 4649.3 |
| 9 | R1-2 | R2-3 | 5028.3 | 4736 |
| 10 | R1-2 | R2-11 | 5037.5 | 4750 |
| 11 | R1-2 | R2-12 | 5038.4 | 4751.3 |
| Relays | For Phase Faults | For Earth Faults | ||
|---|---|---|---|---|
| IP (A) | TDS | IP (A) | TDS | |
| R8-10 | 73 | 0.02 | 15 | 0.02 |
| R7-8 | 110 | 0.1287 | 22 | 0.1763 |
| R7-14 | 74 | 0.02 | 15 | 0.02 |
| R6-7 | 183 | 0.2065 | 37 | 0.3003 |
| R5-6 | 204 | 0.2923 | 41 | 0.4334 |
| R4-5 | 240 | 0.3657 | 48 | 0.5541 |
| R4-13 | 37 | 0.02 | 8 | 0.02 |
| R3-4 | 276 | 0.4331 | 56 | 0.6663 |
| R2-3 | 313 | 0.495 | 63 | 0.7761 |
| R2-11 | 37 | 0.02 | 8 | 0.02 |
| R2-12 | 37 | 0.02 | 8 | 0.02 |
| R1-2 | 385 | 0.5325 | 77 | 0.8612 |
| No. of Pairs | Pair of Relays | IFmax (For Phase Faults) (A) | IFmax (For Earth Faults) (A) | |
|---|---|---|---|---|
| Backup | Primary | |||
| 1 | R19-27 | R27-28 | 4538.3 | 4036.5 |
| 2 | R19-27 | R27-29 | 4538.3 | 4036.5 |
| 3 | R19-27 | R27-30 | 4538.3 | 4036.5 |
| 4 | R20-21 | R21-22 | 4596.2 | 4103.4 |
| 5 | R19-20 | R20-21 | 4516.7 | 4129.9 |
| 6 | R18-19 | R19-20 | 4662.5 | 4197.4 |
| 7 | R18-19 | R19-27 | 4646.1 | 4177.3 |
| 8 | R17-18 | R18-19 | 4714 | 4439 |
| 9 | R17-18 | R18-25 | 4874.3 | 4492.6 |
| 10 | R17-23 | R23-24 | 4710.7 | 4284.5 |
| 11 | R16-17 | R17-23 | 4984.9 | 4655.7 |
| 12 | R16-17 | R17-18 | 5006.6 | 4683.4 |
| 13 | R15-16 | R16-17 | 5149.4 | 4896.2 |
| 14 | R1-15 | R15-16 | 5286.9 | 5106.7 |
| Relays | For Phase Faults | For Earth Faults | ||
|---|---|---|---|---|
| IP (A) | TDS | IP (A) | TDS | |
| R27-28 | 37 | 0.02 | 8 | 0.02 |
| R27-29 | 37 | 0.02 | 8 | 0.02 |
| R27-3 | 37 | 0.02 | 8 | 0.02 |
| R19-27 | 110 | 0.1257 | 22 | 0.1736 |
| R21-22 | 22 | 0.02 | 5 | 0.02 |
| R20-21 | 95 | 0.1296 | 19 | 0.178 |
| R19-20 | 168 | 0.2071 | 34 | 0.3019 |
| R18-19 | 278 | 0.2579 | 56 | 0.3982 |
| R18-25 | 37 | 0.02 | 8 | 0.02 |
| R17-18 | 314 | 0.3261 | 63 | 0.5139 |
| R23-24 | 37 | 0.02 | 8 | 0.02 |
| R17-23 | 73 | 0.1412 | 15 | 0.189 |
| R16-17 | 385 | 0.3767 | 77 | 0.6113 |
| R15-16 | 421 | 0.4368 | 85 | 0.7169 |
| R1-15 | 458 | 0.4936 | 92 | 0.822 |
| Fault | Network Topology | Relay | IF (A) | Conventional Coordination | Modified Coordination | |||
|---|---|---|---|---|---|---|---|---|
| WT | PV | Operating Time (s) | Miscoordination | Operating Time (s) | Miscoordination | |||
| F1 | ـــــ | ـــــ | R8-10 | 4596.4 | 0.032415 | ـــــ | 0.032415 | ـــــ |
| R7-8 | 4596.4 | 0.232466 | 0.236621 | |||||
| √ | ـــــ | R8-10 | 4944.7 | 0.03183 | √ | 0.03183 | ـــــ | |
| R7-8 | 4944.7 | 0.227836 | 0.231908 | |||||
| F2 | ـــــ | ـــــ | R19-20 | 4662.5 | 0.421881 | ـــــ | 0.436548 | ـــــ |
| R18-19 | 4662.5 | 0.622365 | 0.637327 | |||||
| √ | ـــــ | R19-20 | 4703 | 0.420749 | √ | 0.435315828 | ـــــ | |
| R18-19 | 4703 | 0.620408 | 0.635394947 | |||||
| ـــــ | √ | R19-20 | 5011.4 | 0.412614 | ـــــ | 0.426959 | ـــــ | |
| R18-19 | 4664.6 | 0.622263 | 0.637222 | |||||
| √ | √ | R19-20 | 5055 | 0.411528 | ـــــ | 0.425835 | ـــــ | |
| R18-19 | 4705.6 | 0.620283 | 0.635195 | |||||
| F3 | ـــــ | ـــــ | R20-21 | 4516.7 | 0.22597 | ـــــ | 0.233816 | ـــــ |
| R19-20 | 4516.7 | 0.42609 | 0.440841 | |||||
| √ | ـــــ | R20-21 | 4979.6 | 0.220183 | ـــــ | 0.227829 | ـــــ | |
| R19-20 | 4655.3 | 0.422084 | 0.436697 | |||||
| ـــــ | √ | R20-21 | 4959.1 | 0.220422 | √ | 0.228076 | ـــــ | |
| R19-20 | 4959.1 | 0.413936 | 0.428267 | |||||
| √ | √ | R20-21 | 5326.7 | 0.216351 | √ | 0.223863 | ـــــ | |
| R19-20 | 5002.2 | 0.412845 | 0.427138 | |||||
| Fault | Network Topology | Relay | IF (A) | Conventional Coordination | Modified Coordination | |||
|---|---|---|---|---|---|---|---|---|
| WT | PV | Operating Time (s) | Miscoordination | Operating Time (s) | Miscoordination | |||
| F1 | ـــــ | ـــــ | R8-10 | 4133.6 | 0.023542 | ـــــ | 0.023542 | ـــــ |
| R7-8 | 4133.6 | 0.223576 | 0.225985 | |||||
| √ | ـــــ | R8-10 | 4387.7 | 0.023281 | √ | 0.023281 | ـــــ | |
| R7-8 | 4387.7 | 0.220923 | 0.223304 | |||||
| F2 | ـــــ | ـــــ | R19-20 | 4197.4 | 0.418027 | ـــــ | 0.425366 | ـــــ |
| R18-19 | 4197.4 | 0.618227 | 0.626766 | |||||
| √ | ـــــ | R19-20 | 4298.7 | 0.415867 | √ | 0.423167 | ـــــ | |
| R18-19 | 4298.7 | 0.614681 | 0.623171 | |||||
| ـــــ | √ | R19-20 | 4453.1 | 0.412708 | ـــــ | 0.419954 | ـــــ | |
| R18-19 | 4287.3 | 0.615074 | 0.62357 | |||||
| √ | √ | R19-20 | 4550.8 | 0.410788 | ـــــ | 0.418 | ـــــ | |
| R18-19 | 4381.1 | 0.611886 | 0.620338 | |||||
| F3 | ـــــ | ـــــ | R20-21 | 4129.9 | 0.219294 | ـــــ | 0.223976 | ـــــ |
| R19-20 | 4129.9 | 0.419508 | 0.426873 | |||||
| √ | ـــــ | R20-21 | 4397.8 | 0.216624 | ـــــ | 0.221249 | ـــــ | |
| R19-20 | 4231.6 | 0.417289 | 0.424615 | |||||
| ـــــ | √ | R20-21 | 4379.2 | 0.216802 | √ | 0.221431 | ـــــ | |
| R19-20 | 4379.2 | 0.414200 | 0.421472 | |||||
| √ | √ | R20-21 | 4647.7 | 0.214327 | √ | 0.218902 | ـــــ | |
| R19a | 4477.4 | 0.412225 | 0.419462 | |||||
| No. of Pairs | Pair of Relays | DG status | IFmax (For Phase Faults) (A) | IFmax (For Earth Faults) (A) | |||
|---|---|---|---|---|---|---|---|
| Backup | Primary | WT | Backup | Primary | Backup | Primary | |
| 1 | R7-8 | R8-10 | √ | 4944.7 | 4944.7 | 4387.7 | 4387.7 |
| 2 | R6-7 | R7-8 | √ | 4736.77 | 5058.4 | 4369.8 | 4535.2 |
| 3 | R6-7 | R7-14 | √ | 4753.02 | 5075.8 | 4391.3 | 4557.5 |
| 4 | R5-6 | R6-7 | √ | 4811.4 | 4811.4 | 4472 | 4472 |
| 5 | R4-5 | R5-6 | √ | 4917.6 | 4917.6 | 4621.6 | 4621.6 |
| 6 | R3-4 | R4-5 | √ | 4985.4 | 4985.4 | 4719 | 4719 |
| 7 | R3-4 | R4-13 | √ | 4987.35 | 5303.16 | 4722.1 | 4885.4 |
| 8 | R2-3 | R3-4 | √ | 5013.5 | 5013.5 | 4760.3 | 4760.3 |
| 9 | R1-2 | R2-3 | √ | 5072.9 | 5072.9 | 4848.3 | 4848.3 |
| 10 | R1-2 | R2-11 | √ | 5082.16 | 5395.4 | 4863.1 | 5024.5 |
| 11 | R1-2 | R2-12 | √ | 5083.06 | 5396.5 | 4864.4 | 5025.9 |
| Feeder | Relays | For Phase Faults | For Earth Faults | ||
|---|---|---|---|---|---|
| IP | TDS | IP | TDS | ||
| RHS feeder | R8-10 | 73 | 0.02 | 15 | 0.02 |
| R7-8 | 110 | 0.131 | 22 | 0.1782 | |
| R7-14 | 74 | 0.02 | 15 | 0.02 | |
| R6-7 | 183 | 0.2084 | 37 | 0.3021 | |
| R5-6 | 204 | 0.2945 | 41 | 0.4359 | |
| R4-5 | 240 | 0.368 | 48 | 0.5573 | |
| R4-13 | 37 | 0.02 | 8 | 0.02 | |
| R3-4 | 276 | 0.4356 | 56 | 0.6703 | |
| R2-3 | 313 | 0.4977 | 63 | 0.7808 | |
| R2-11 | 37 | 0.02 | 8 | 0.02 | |
| R2-12 | 37 | 0.02 | 8 | 0.02 | |
| R1-2 | 385 | 0.5354 | 77 | 0.8666 | |
| LHS feeder | R27-28 | 37 | 0.02 | 8 | 0.02 |
| R27-29 | 37 | 0.02 | 8 | 0.02 | |
| R27-30 | 37 | 0.02 | 8 | 0.02 | |
| R19-27 | 110 | 0.128 | 22 | 0.176 | |
| R21-22 | 22 | 0.02 | 5 | 0.02 | |
| R20-21 | 95 | 0.1341 | 19 | 0.1818 | |
| R19-20 | 168 | 0.2143 | 34 | 0.3072 | |
| R18-19 | 278 | 0.2641 | 56 | 0.4037 | |
| R18-25 | 37 | 0.02 | 8 | 0.02 | |
| R17-18 | 314 | 0.3332 | 63 | 0.5207 | |
| R23-24 | 37 | 0.02 | 8 | 0.02 | |
| R17-23 | 73 | 0.1452 | 15 | 0.1921 | |
| R16-17 | 385 | 0.3836 | 77 | 0.6193 | |
| R15-16 | 421 | 0.4438 | 85 | 0.7261 | |
| R1-15 | 458 | 0.5006 | 92 | 0.8324 | |
| No. of Pairs | Pair of Relays | DGs status | IFmax (For Phase Faults) (A) | IFmax (For Earth Faults) (A) | ||||
|---|---|---|---|---|---|---|---|---|
| Backup | Primary | WT | PV | Backup | Primary | Backup | Primary | |
| 1 | R19-27 | R27-28 | √ | ـــــ | 4882.2 | 4882.2 | 4285.5 | 4285.5 |
| ـــــ | √ | 4540.3 | 4887.5 | 4123.1 | 4290 | |||
| √ | √ | 4885.6 | 5235 | 4368.1 | 4539.6 | |||
| 2 | R19-27 | R27-29 | √ | ـــــ | 4882.2 | 4882.2 | 4285.5 | 4285.5 |
| ـــــ | √ | 4540.3 | 4887.5 | 4123.1 | 4290 | |||
| √ | √ | 4885.6 | 5235 | 4368.1 | 4539.6 | |||
| 3 | R19-27 | R27-30 | √ | ـــــ | 4882.2 | 4882.2 | 4285.5 | 4285.5 |
| ـــــ | √ | 4540.5 | 4540.5 | 4123.1 | 4123.1 | |||
| √ | √ | 4885.8 | 4885.8 | 4341.4 | 4341.4 | |||
| 4 | R20-21 | R21-22 | √ | ـــــ | 4957.8 | 4957.8 | 4368.7 | 4368.7 |
| ـــــ | √ | 4937.1 | 4937.1 | 4350 | 4350 | |||
| √ | √ | 5302.3 | 5302.3 | 4615.9 | 4615.9 | |||
| 5 | R19-20 | R20-21 | √ | ـــــ | 4655.3 | 4979.6 | 4231.6 | 4397.8 |
| ـــــ | √ | 4959.1 | 4959.1 | 4379.2 | 4379.2 | |||
| √ | √ | 5002.2 | 5326.7 | 4477.4 | 4647.7 | |||
| 6 | R18-19 | R19-20 | √ | ـــــ | 4703 | 4703 | 4298.7 | 4298.7 |
| ـــــ | √ | 4664.6 | 5011.4 | 4287.3 | 4453.1 | |||
| √ | √ | 4705.6 | 5055 | 4381.1 | 4550.8 | |||
| 7 | R18-19 | R19-27 | √ | ـــــ | 4684.9 | 5004.7 | 4276.3 | 4441.9 |
| ـــــ | √ | 4649.4 | 4649.4 | 4267.1 | 4267.1 | |||
| √ | √ | 4688.2 | 5008.4 | 4358.5 | 4527.5 | |||
| 8 | R17-18 | R18-19 | √ | ـــــ | 4877.8 | 4877.8 | 4543.8 | 4543.8 |
| ـــــ | √ | 4838.6 | 4838.6 | 4534.9 | 4534.9 | |||
| √ | √ | 4881.2 | 4881.2 | 4630.6 | 4630.6 | |||
| 9 | R17-18 | R18-25 | √ | ـــــ | 4916.2 | 5233 | 4598.2 | 4763.3 |
| ـــــ | √ | 4876.8 | 5223.7 | 4589.9 | 4754.4 | |||
| √ | √ | 4919.4 | 5583.6 | 4686.5 | 5023.78 | |||
| 10 | R17-23 | R23-24 | √ | ـــــ | 5023.5 | 5023.5 | 4510.4 | 4510.4 |
| ـــــ | √ | 5017 | 5017 | 4504.3 | 4504.3 | |||
| √ | √ | 5326.3 | 5326.3 | 4725.5 | 4725.5 | |||
| 11 | R16-17 | R17-23 | √ | ـــــ | 5027.6 | 5333.5 | 4761.5 | 4920.3 |
| ـــــ | √ | 4988.1 | 5326.7 | 4755.3 | 4913.7 | |||
| √ | √ | 5027.5 | 5674 | 4849.6 | 5175.1 | |||
| 12 | R16-17 | R17-18 | √ | ـــــ | 5050.2 | 5050.2 | 4792 | 4792 |
| ـــــ | √ | 5009.6 | 5009.6 | 4787.1 | 4787.1 | |||
| √ | √ | 5053.7 | 5053.7 | 4884.2 | 4884.2 | |||
| 13 | R15-16 | R16-17 | √ | ـــــ | 5193.9 | 5193.9 | 5009.5 | 5009.5 |
| ـــــ | √ | 5152.2 | 5152.2 | 5004.7 | 5004.7 | |||
| √ | √ | 5197.2 | 5197.2 | 5106.1 | 5106.1 | |||
| 14 | R1-15 | R15-16 | √ | ـــــ | 5332.5 | 5332.5 | 5223 | 5223 |
| ـــــ | √ | 5289.4 | 5289.4 | 5220.3 | 5220.3 | |||
| √ | √ | 5335.9 | 5335.9 | 5324 | 5324 | |||
| Feeder | Relays | For Phase Faults | For Earth Faults | ||
|---|---|---|---|---|---|
| IP | TDS | IP | TDS | ||
| RHS feeder | R2-1 | 25 | 0.02 | 5 | 0.02 |
| R3-2 | 25 | 0.0953 | 5 | 0.1233 | |
| R4-3 | 25 | 0.1708 | 5 | 0.2275 | |
| R5-4 | 25 | 0.2463 | 5 | 0.332 | |
| R6-5 | 194 | 0.0644 | 39 | 0.1795 | |
| R7-6 | 187 | 0.0852 | 38 | 0.2271 | |
| LHS feeder | R15-1 | 25 | 0.02 | 5 | 0.02 |
| R16-15 | 25 | 0.1164 | 5 | 0.1437 | |
| R17-16 | 25 | 0.213 | 5 | 0.2684 | |
| R18-17 | 25 | 0.3099 | 5 | 0.3941 | |
| R19-18 | 25 | 0.4069 | 5 | 0.521 | |
| R20-19 | 164 | 0.1274 | 33 | 0.2911 | |
| R27-19 | 25 | 0.4843 | 5 | 0.6269 | |
| R30-27 | 39 | 0.4654 | 8 | 0.6362 | |
| Part No. | No. of Pairs | Pair of Relays | Network Topology | IFmax (For Phase Faults) (A) | IFmax (For Earth Faults) (A) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BC | DGs | |||||||||||
| Backup | Primary | Case a | Case b | WT (Bus 7) | WT (Bus 20) | PV | Backup | Primary | Backup | Primary | ||
| 1st Part | 1 | R19-27 | R27-28 | √ | ـــــ | √ | √ | ـــــ | 4395.6 | 4395.6 | 3438.7 | 3438.7 |
| ـــــ | √ | √ | √ | ـــــ | 5284.9 | 5284.9 | 4515.7 | 4515.7 | ||||
| ـــــ | ـــــ | ـــــ | √ | ـــــ | 4882.2 | 4882.2 | 4285.5 | 4285.5 | ||||
| 2 | R19-27 | R27-29 | √ | ـــــ | √ | √ | ـــــ | 4395.6 | 4395.6 | 3438.7 | 3438.7 | |
| ـــــ | √ | √ | √ | ـــــ | 5284.9 | 5284.9 | 4515.7 | 4515.7 | ||||
| ـــــ | ـــــ | ـــــ | √ | ـــــ | 4882.2 | 4882.2 | 4285.5 | 4285.5 | ||||
| 3 | R19-27 | R27-30 | √ | ـــــ | √ | √ | √ | 4399.3 | 4399.3 | 3489.7 | 3489.7 | |
| ـــــ | √ | √ | √ | √ | 5287.6 | 5287.6 | 4587.8 | 4587.8 | ||||
| ـــــ | ـــــ | ـــــ | √ | √ | 4885.8 | 4885.8 | 4341.4 | 4341.4 | ||||
| 4 | R20-21 | R21-22 | √ | ـــــ | √ | √ | √ | 4780.4 | 4780.4 | 3709.7 | 3709.7 | |
| ـــــ | √ | √ | √ | √ | 5711.1 | 5711.1 | 4847.7 | 4847.7 | ||||
| ـــــ | ـــــ | ـــــ | √ | √ | 5302.3 | 5302.3 | 4615.9 | 4615.9 | ||||
| 5 | R19-20 | R20-21 | √ | ـــــ | √ | ـــــ | √ | 4448.7 | 4448.7 | 3489.3 | 3489.3 | |
| ـــــ | √ | √ | ـــــ | √ | 5378 | 5378 | 4621.7 | 4621.7 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | √ | 4959.1 | 4959.1 | 4379.2 | 4379.2 | ||||
| 6 | R18-19 | R19-20 | √ | ـــــ | √ | √ | ـــــ | 4216.3 | 4216.3 | 3403.8 | 3403.8 | |
| ـــــ | √ | √ | √ | ـــــ | 5138.6 | 5138.6 | 4549.4 | 4549.4 | ||||
| ـــــ | ـــــ | ـــــ | √ | ـــــ | 4703 | 4703 | 4298.7 | 4298.7 | ||||
| 7 | R18-19 | R19-27 | √ | ـــــ | √ | ـــــ | √ | 4170.7 | 4170.7 | 3372.4 | 3372.4 | |
| ـــــ | √ | √ | ـــــ | √ | 5082.7 | 5082.7 | 4514.6 | 4514.6 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | √ | 4649.4 | 4649.4 | 4267.1 | 4267.1 | ||||
| 8 | R17-18 | R18-19 | √ | ـــــ | √ | √ | √ | 4393.1 | 4393.1 | 3644 | 3644 | |
| ـــــ | √ | √ | √ | √ | 5362.2 | 5362.2 | 4910.3 | 4910.3 | ||||
| ـــــ | ـــــ | ـــــ | √ | √ | 4881.2 | 4881.2 | 4630.6 | 4630.6 | ||||
| 9 | R17-18 | R18-25 | √ | ـــــ | √ | ـــــ | ـــــ | 4394.5 | 4394.5 | 3559.6 | 3559.6 | |
| ـــــ | √ | √ | ـــــ | ـــــ | 5369.2 | 5369.2 | 4804.6 | 4804.6 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 4874.3 | 4874.3 | 4492.6 | 4492.6 | ||||
| 10 | R7-8 | R8-10 | √ | ـــــ | √ | √ | √ | 5726.4 | 5726.4 | 4873.4 | 4873.4 | |
| ـــــ | √ | √ | √ | √ | 5123.1 | 5123.1 | 4162.7 | 4162.7 | ||||
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 4944.7 | 4944.7 | 4387.7 | 4387.7 | ||||
| 11 | R6-7 | R7-8 | √ | ـــــ | ـــــ | √ | √ | 5529.2 | 5529.2 | 4800.8 | 4800.8 | |
| ـــــ | √ | ـــــ | √ | √ | 4908.6 | 4908.6 | 4062.1 | 4062.1 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 4696.3 | 4696.3 | 4266.2 | 4266.2 | ||||
| 12 | R6-7 | R7-14 | √ | ـــــ | ـــــ | √ | √ | 5551 | 5551 | 4826.7 | 4826.7 | |
| ـــــ | √ | ـــــ | √ | √ | 4927.1 | 4927.1 | 4082.2 | 4082.2 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 4711.4 | 4711.4 | 4286.2 | 4286.2 | ||||
| 4th Part | 13 | R16-15 | R15-1 | ـــــ | ـــــ | ـــــ | √ | √ | 654.8 | 654.8 | 318.1 | 318.1 |
| 14 | R17-16 | R16-15 | √ | ـــــ | √ | √ | √ | 5018.9 | 5018.9 | 3996.1 | 3996.1 | |
| ـــــ | √ | √ | √ | √ | 957.4 | 957.4 | 508.1 | 508.1 | ||||
| ـــــ | ـــــ | ـــــ | √ | √ | 659.1 | 659.1 | 328.4 | 328.4 | ||||
| 3rd Part | 15 | R23-17 | R17-16 | √ | ـــــ | √ | ـــــ | ـــــ | 4533.7 | 4533.7 | 3716.9 | 3716.9 |
| ـــــ | √ | √ | ـــــ | ـــــ | 312 | 312 | 165.9 | 165.9 | ||||
| 16 | R23-17 | R17-18 | √ | ـــــ | √ | √ | √ | 4567.8 | 4567.8 | 3840.4 | 3840.4 | |
| ـــــ | √ | √ | √ | √ | 309 | 5581.2 | 172.9 | 5205.3 | ||||
| 17 | R24-23 | R23-17 | √ | ـــــ | √ | √ | √ | 4820.5 | 4820.5 | 4140.2 | 4140.2 | |
| ـــــ | √ | √ | √ | √ | 316.4 | 316.4 | 181.2 | 181.2 | ||||
| 18 | R6-24 | R24-23 | √ | ـــــ | √ | √ | √ | 5154.4 | 5154.4 | 4558.5 | 4558.5 | |
| ـــــ | √ | √ | √ | √ | 319.6 | 319.6 | 190.4 | 190.4 | ||||
| 3rd-2nd | 19 | R5-6 | R6-24 | √ | ـــــ | ـــــ | √ | √ | 5007.8 | 5007.8 | 4578 | 4578 |
| 2nd Part | 20 | R5-6 | R6-7 | √ | ـــــ | √ | ـــــ | ـــــ | 5019.6 | 5019.6 | 4536.8 | 4536.8 |
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 4811.4 | 4811.4 | 4472 | 4472 | ||||
| 21 | R4-5 | R5-6 | √ | ـــــ | √ | √ | √ | 5176 | 5176 | 4844.2 | 4844.2 | |
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 4917.6 | 4917.6 | 4621.6 | 4621.6 | ||||
| 22 | R3-4 | R4-5 | √ | ـــــ | √ | √ | √ | 5247.5 | 5247.5 | 4950.6 | 4950.6 | |
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 4985.4 | 4985.4 | 4719 | 4719 | ||||
| 23 | R3-4 | R4-13 | √ | ـــــ | ـــــ | ـــــ | ـــــ | 5165.9 | 5165.9 | 4708.9 | 4708.9 | |
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 4943.7 | 4943.7 | 4612.3 | 4612.3 | ||||
| 24 | R2-3 | R3-4 | √ | ـــــ | √ | √ | √ | 5277.1 | 5277.1 | 4995.8 | 4995.8 | |
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 5013.5 | 5013.5 | 4760.3 | 4760.3 | ||||
| 25 | R1-2 | R2-3 | √ | ـــــ | √ | √ | √ | 5339.6 | 5339.6 | 5092.1 | 5092.1 | |
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 5072.9 | 5072.9 | 4848.3 | 4848.3 | ||||
| 26 | R1-2 | R2-11 | √ | ـــــ | ـــــ | ـــــ | ـــــ | 5264.5 | 5264.5 | 4857.4 | 4857.4 | |
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 5037.5 | 5037.5 | 4750 | 4750 | ||||
| 27 | R1-2 | R2-12 | √ | ـــــ | ـــــ | ـــــ | ـــــ | 5265.6 | 5265.6 | 4858.8 | 4858.8 | |
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 5038.4 | 5038.4 | 4751.3 | 4751.3 | ||||
| No. of Pairs | Pair of Relays | Network Topology | IFmax (For Phase Faults) (A) | IFmax (For Earth Faults) (A) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BC | DGs | |||||||||||
| Backup | Primary | Case a | Case b | WT (B.B 7) | WT (B.B 20) | PV | Backup | Primary | Backup | Primary | ||
| 1st Part | 1 | R19-27 | R27-28 | √ | ـــــ | √ | √ | ـــــ | 4395.6 | 4395.6 | 3438.7 | 3438.7 |
| ـــــ | √ | √ | √ | ـــــ | 5284.9 | 5284.9 | 4515.7 | 4515.7 | ||||
| ـــــ | ـــــ | ـــــ | √ | ـــــ | 4882.2 | 4882.2 | 4285.5 | 4285.5 | ||||
| 2 | R19-27 | R27-29 | √ | ـــــ | √ | √ | ـــــ | 4395.6 | 4395.6 | 3438.7 | 3438.7 | |
| ـــــ | √ | √ | √ | ـــــ | 5284.9 | 5284.9 | 4515.7 | 4515.7 | ||||
| ـــــ | ـــــ | ـــــ | √ | ـــــ | 4882.2 | 4882.2 | 4285.5 | 4285.5 | ||||
| 3 | R19-27 | R27-30 | √ | ـــــ | √ | √ | √ | 4399.3 | 4399.3 | 3489.7 | 3489.7 | |
| ـــــ | √ | √ | √ | √ | 5287.6 | 5287.6 | 4587.8 | 4587.8 | ||||
| ـــــ | ـــــ | ـــــ | √ | √ | 4885.8 | 4885.8 | 4341.4 | 4341.4 | ||||
| 4 | R20-21 | R21-22 | √ | ـــــ | √ | √ | √ | 4780.4 | 4780.4 | 3709.7 | 3709.7 | |
| ـــــ | √ | √ | √ | √ | 5711.1 | 5711.1 | 4847.7 | 4847.7 | ||||
| ـــــ | ـــــ | ـــــ | √ | √ | 5302.3 | 5302.3 | 4615.9 | 4615.9 | ||||
| 5 | R19-20 | R20-21 | √ | ـــــ | √ | ـــــ | √ | 4448.7 | 4448.7 | 3489.3 | 3489.3 | |
| ـــــ | √ | √ | ـــــ | √ | 5378 | 5378 | 4621.7 | 4621.7 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | √ | 4959.1 | 4959.1 | 4379.2 | 4379.2 | ||||
| 6 | R18-19 | R19-20 | √ | ـــــ | √ | √ | ـــــ | 4216.3 | 4216.3 | 3403.8 | 3403.8 | |
| ـــــ | √ | √ | √ | ـــــ | 5138.6 | 5138.6 | 4549.4 | 4549.4 | ||||
| ـــــ | ـــــ | ـــــ | √ | ـــــ | 4703 | 4703 | 4298.7 | 4298.7 | ||||
| 7 | R18-19 | R19-27 | √ | ـــــ | √ | ـــــ | √ | 4170.7 | 4170.7 | 3372.4 | 3372.4 | |
| ـــــ | √ | √ | ـــــ | √ | 5082.7 | 5082.7 | 4514.6 | 4514.6 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | √ | 4649.4 | 4649.4 | 4267.1 | 4267.1 | ||||
| 8 | R17-18 | R18-19 | √ | ـــــ | √ | √ | √ | 4393.1 | 4393.1 | 3644 | 3644 | |
| ـــــ | √ | √ | √ | √ | 5362.2 | 5362.2 | 4910.3 | 4910.3 | ||||
| ـــــ | ـــــ | ـــــ | √ | √ | 4881.2 | 4881.2 | 4630.6 | 4630.6 | ||||
| 9 | R17-18 | R18-25 | √ | ـــــ | √ | ـــــ | ـــــ | 4394.5 | 4394.5 | 3559.6 | 3559.6 | |
| ـــــ | √ | √ | ـــــ | ـــــ | 5369.2 | 5369.2 | 4804.6 | 4804.6 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 4874.3 | 4874.3 | 4492.6 | 4492.6 | ||||
| 10 | R7-8 | R8-10 | √ | ـــــ | √ | √ | √ | 5726.4 | 5726.4 | 4873.4 | 4873.4 | |
| ـــــ | √ | √ | √ | √ | 5123.1 | 5123.1 | 4162.7 | 4162.7 | ||||
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 4944.7 | 4944.7 | 4387.7 | 4387.7 | ||||
| 11 | R6-7 | R7-8 | √ | ـــــ | ـــــ | √ | √ | 5529.2 | 5529.2 | 4800.8 | 4800.8 | |
| ـــــ | √ | ـــــ | √ | √ | 4908.6 | 4908.6 | 4062.1 | 4062.1 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 4696.3 | 4696.3 | 4266.2 | 4266.2 | ||||
| 12 | R6-7 | R7-14 | √ | ـــــ | ـــــ | √ | √ | 5551 | 5551 | 4826.7 | 4826.7 | |
| ـــــ | √ | ـــــ | √ | √ | 4927.1 | 4927.1 | 4082.2 | 4082.2 | ||||
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 4711.4 | 4711.4 | 4286.2 | 4286.2 | ||||
| 2nd Part | 13 | R3-2 | R2-1 | ـــــ | ـــــ | √ | ـــــ | ـــــ | 326.4 | 326.4 | 163.8 | 163.8 |
| 14 | R3-2 | R2-11 | ـــــ | √ | √ | √ | √ | 5011.3 | 5011.3 | 4046 | 4046 | |
| √ | ـــــ | √ | √ | √ | 927.5 | 6252.2 | 512.1 | 5609.1 | ||||
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 326.7 | 5395.4 | 167 | 5024.5 | ||||
| 15 | R3-2 | R2-12 | ـــــ | √ | √ | √ | √ | 5012.4 | 5012.4 | 4047.2 | 4047.2 | |
| √ | ـــــ | √ | √ | √ | 927.9 | 6253.7 | 512.2 | 5610.9 | ||||
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 326.8 | 5396.5 | 167 | 5025.9 | ||||
| 16 | R4-3 | R3-2 | ـــــ | √ | √ | √ | √ | 5091.1 | 5091.1 | 4129.5 | 4129.5 | |
| √ | ـــــ | √ | √ | √ | 933.2 | 933.2 | 519.2 | 519.2 | ||||
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 327.8 | 327.8 | 169.2 | 169.2 | ||||
| 17 | R5-4 | R4-3 | ـــــ | √ | √ | √ | √ | 5133.3 | 5133.3 | 4174.3 | 4174.3 | |
| √ | ـــــ | √ | √ | √ | 935.3 | 935.3 | 522.7 | 522.7 | ||||
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 328 | 328 | 170.4 | 170.4 | ||||
| 18 | R5-4 | R4-13 | ـــــ | √ | √ | √ | √ | 5127.2 | 5127.2 | 4168 | 4168 | |
| √ | ـــــ | √ | √ | √ | 932.5 | 6161.6 | 521.6 | 5459.2 | ||||
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 327.2 | 5303.2 | 170.2 | 4885.43 | ||||
| 19 | R6-5 | R5-4 | ـــــ | √ | √ | √ | √ | 5199.4 | 5199.4 | 4245.5 | 4245.5 | |
| √ | ـــــ | √ | √ | √ | 938.7 | 938.7 | 528.3 | 528.3 | ||||
| ـــــ | ـــــ | √ | ـــــ | ـــــ | 328.4 | 328.4 | 172.2 | 172.2 | ||||
| 2nd-3rd | 20 | R24-6 | R6-5 | ـــــ | √ | ـــــ | √ | √ | 4989.4 | 4989.4 | 4152.3 | 4152.3 |
| 3rd Part | 21 | R24-6 | R6-7 | ـــــ | √ | √ | √ | √ | 5037.9 | 5037.9 | 4245 | 4245 |
| √ | ـــــ | √ | √ | √ | 620.6 | 5677.3 | 355.7 | 5018.4 | ||||
| 22 | R23-24 | R24-6 | ـــــ | √ | √ | √ | √ | 5193.4 | 5193.4 | 4430.1 | 4430.1 | |
| √ | ـــــ | √ | √ | √ | 627.4 | 627.4 | 364.9 | 364.9 | ||||
| 23 | R17-23 | R23-24 | ـــــ | √ | √ | √ | √ | 5541.5 | 5541.5 | 4863.8 | 4863.8 | |
| √ | ـــــ | √ | √ | √ | 635.3 | 635.3 | 381.1 | 381.1 | ||||
| ـــــ | ـــــ | ـــــ | √ | √ | 5326.3 | 5326.3 | 4725.5 | 4725.5 | ||||
| 4th Part | 24 | R16-17 | R17-23 | ـــــ | √ | √ | ـــــ | ـــــ | 5222.2 | 5222.2 | 4841.5 | 4841.5 |
| ـــــ | ـــــ | ـــــ | ـــــ | ـــــ | 4984.9 | 4984.9 | 4655.7 | 4655.7 | ||||
| 25 | R16-17 | R17-18 | ـــــ | √ | ـــــ | √ | √ | 5242.2 | 5242.2 | 4956.7 | 4956.7 | |
| ـــــ | ـــــ | ـــــ | √ | √ | 5053.7 | 5053.7 | 4884.2 | 4884.2 | ||||
| 26 | R15-16 | R16-17 | ـــــ | √ | √ | √ | √ | 5439.6 | 5439.6 | 5276.5 | 5276.5 | |
| ـــــ | ـــــ | ـــــ | √ | √ | 5197.2 | 5197.2 | 5106.1 | 5106.1 | ||||
| 27 | R1-15 | R15-16 | ـــــ | √ | √ | √ | √ | 5584.8 | 5584.8 | 5509.5 | 5509.5 | |
| ـــــ | ـــــ | ـــــ | √ | √ | 5335.9 | 5335.9 | 5324 | 5324 | ||||
| Relays | For Phase Faults | For Earth Faults | ||
|---|---|---|---|---|
| IP (A) | TDS | IP (A) | TDS | |
| R27-28 | 38 | 0.02 | 8 | 0.02 |
| R27-29 | 38 | 0.02 | 8 | 0.02 |
| R27-30 | 38 | 0.02 | 8 | 0.02 |
| R21-22 | 23 | 0.02 | 5 | 0.02 |
| R20-21 | 99 | 0.1352 | 20 | 0.1816 |
| R19-20 | 174 | 0.2169 | 35 | 0.3085 |
| R19-27 | 114 | 0.1293 | 23 | 0.1761 |
| R18-19 | 287 | 0.2688 | 58 | 0.4053 |
| R18-25 | 38 | 0.02 | 8 | 0.02 |
| R17-18 | 325 | 0.3394 | 65 | 0.5235 |
| R8-10 | 75 | 0.02 | 15 | 0.02 |
| R7-8 | 113 | 0.1347 | 23 | 0.18 |
| R7-14 | 75 | 0.02 | 15 | 0.02 |
| R6-7 | 187 | 0.2168 | 38 | 0.3074 |
| R15-1 | 25 | 0.02 | 5 | 0.02 |
| R16-15 | 38 | 0.1011 | 8 | 0.1271 |
| R17-16 | 75 | 0.2117 | 15 | 0.2824 |
| R23-17 | 399 | 0.3838 | 80 | 0.6116 |
| R24-23 | 435 | 0.4406 | 87 | 0.7129 |
| R6-24 | 472 | 0.4956 | 95 | 0.8115 |
| R5-6 | 678 | 0.4764 | 136 | 0.8381 |
| R4-5 | 715 | 0.5214 | 143 | 0.9302 |
| R4-13 | 38 | 0.02 | 8 | 0.02 |
| R3-4 | 752 | 0.5645 | 151 | 1.0189 |
| R2-3 | 789 | 0.6057 | 158 | 1.1074 |
| R2-11 | 38 | 0.02 | 8 | 0.02 |
| R2-12 | 38 | 0.02 | 8 | 0.02 |
| R1-2 | 864 | 0.6294 | 173 | 1.1791 |
| R2-1 | 25 | 0.02 | 5 | 0.02 |
| R3-2 | 75 | 0.1423 | 15 | 0.1871 |
| R4-3 | 112 | 0.2416 | 23 | 0.3284 |
| R5-4 | 149 | 0.3277 | 30 | 0.459 |
| R6-5 | 194 | 0.3997 | 39 | 0.574 |
| R24-6 | 393 | 0.3851 | 79 | 0.6015 |
| R23-24 | 430 | 0.4443 | 86 | 0.7055 |
| R17-23 | 466 | 0.5025 | 94 | 0.8067 |
| R16-17 | 783 | 0.4478 | 157 | 0.7994 |
| R15-16 | 820 | 0.492 | 164 | 0.8918 |
| R1-15 | 856 | 0.5354 | 172 | 0.98193 |
| R18-17 | 25 | 5.3177 | 5 | 2.6573 |
| R19-18 | 25 | 5.4147 | 5 | 2.7886 |
| R20-19 | 174 | 1.325 | 35 | 1.3526 |
| R27-19 | 25 | 5.4921 | 5 | 2.8985 |
| R30-27 | 41 | 4.5056 | 9 | 2.5215 |
| R7-6 | 195 | 0.4108 | 39 | 1.8708 |
| Fault | Network Topology | Relay | IF (A) | Operating Time (s) | Miscoordination | Insensitivity |
|---|---|---|---|---|---|---|
| F4 | Normal operation | R3-4 | 4969.5 | 2.053314 | — | — |
| R2-3 | 4969.5 | 2.261769 | ||||
| DGs inserted | R3-4 | 5013.5 | 2.043592 | — | — | |
| R2-3 | 5013.5 | 2.250787 | ||||
| R4-3 | 327.89 | 1.557657 | — | — | ||
| R5-4 | 327.89 | 2.885769 | ||||
| Section 1-2 disconnected | R4-3 | 5115.7 | 0.42587 | — | — | |
| R5-4 | 5115.7 | 0.626103 | ||||
| Section 1-15 disconnected | R3-4 | 5277.1 | 1.98882 | — | — | |
| R2-3 | 5277.1 | 2.188967 | ||||
| R4-3 | 934.5 | 0.780423 | — | — | ||
| R5-4 | 934.5 | 1.226689 | ||||
| F5 | Normal operation | R15-16 | 5286.9 | 1.813728 | — | — |
| R1-15 | 5286.9 | 2.021169 | ||||
| DGs inserted | R15-16 | 5335.9 | 1.804626 | — | — | |
| R1-15 | 5335.9 | 2.010793 | ||||
| R16-15 | 656.6 | 0.241257 | — | — | ||
| R17-16 | 656.6 | 0.66829 | ||||
| Section 1-2 disconnected | R15-16 | 5584.8 | 1.760933 | — | — | |
| R1-15 | 5584.8 | 1.961014 | ||||
| R16-15 | 951.2 | 0.21269 | — | — | ||
| R17-16 | 951.2 | 0.568651 | ||||
| Section 1-15 disconnected | R16-15 | 4910.07 | 0.138558 | — | — | |
| R17-16 | 4910.07 | 0.339761 | ||||
| F6 | Normal operation | R23-24 | 4710.7 | 1.268375 | — | — |
| R17-23 | 4710.7 | 1.485582 | ||||
| DGs inserted | R23-24 | 5326.3 | 1.204981 | — | — | |
| R17-23 | 5326.3 | 1.408942 | ||||
| Section 1-2 disconnected | R23-24 | 5541.5 | 1.185836 | — | — | |
| R17-23 | 5541.5 | 1.385848 | ||||
| R24-23 | 317.62 | 1.6171 | — | — | ||
| R6-24 | 317.62 | 1.8189 | ||||
| R7-6 | 317.62 | 5.865651 | ||||
| Section 1-15 disconnected | R23-24 | 635.3 | 7.937178 | — | — | |
| R17-23 | 635.3 | 11.314869 | ||||
| R24-23 | 4944.91 | 1.238169 | — | — | ||
| R6-24 | 4944.91 | 1.442524 |
| Fault | Network Topology | Relay | IF (A) | Operating Time (s) | Miscoordination | Insensitivity | |
|---|---|---|---|---|---|---|---|
| F4 | Normal operation | R3-4 | 4649.3 | 2.010589 | — | — | |
| R2-3 | 4649.3 | 2.215555 | |||||
| DGs inserted | R3-4 | 4760.3 | 1.996366 | — | — | ||
| R2-3 | 4760.3 | 2.19968 | |||||
| R4-3 | 169.92 | 1.126661 | — | — | |||
| R5-4 | 169.92 | 1.820858 | |||||
| Section 1-2 disconnected | R4-3 | 4155.8 | 0.419762 | — | — | ||
| R5-4 | 4155.8 | 0.619982 | |||||
| Section 1-15 disconnected | R3-4 | 4995.8 | 1.967854 | — | — | ||
| R2-3 | 4995.8 | 2.167867 | |||||
| R4-3 | 521.3 | 0.71385 | — | — | |||
| R5-4 | 521.3 | 1.093519 | |||||
| F5 | Normal operation | R15-16 | 5106.7 | 1.753821 | — | — | |
| R1-15 | 5106.7 | 1.959139 | |||||
| DGs inserted | R15-16 | 5324 | 1.73209 | — | — | ||
| R1-15 | 5324 | 1.934539 | |||||
| R16-15 | 322.54 | 0.231881 | — | — | |||
| R17-16 | 322.54 | 0.624726 | |||||
| Section 1-2 disconnected | R15-16 | 5509.5 | 1.714616 | — | — | ||
| R1-15 | 5509.5 | 1.914763 | |||||
| R16-15 | 499.03 | 0.206481 | — | — | |||
| R17-16 | 499.03 | 0.544519 | |||||
| Section 1-15 disconnected | R16-15 | 3887.14 | 0.135111 | — | — | ||
| R17-16 | 3887.14 | 0.336305 | |||||
| F6 | Normal operation | R23-24 | 4284.5 | 1.214815 | — | — | |
| R17-23 | 4284.5 | 1.422703 | |||||
| DGs inserted | R23-24 | 4725.5 | 1.183933 | — | — | ||
| R17-23 | 4725.5 | 1.385748 | |||||
| Section 1-2 disconnected | R23-24 | 4863.8 | 1.175126 | — | — | ||
| R17-23 | 4863.8 | 1.375216 | |||||
| R24-23 | 185.27 | 6.551969 | — | — | |||
| R6-24 | 185.27 | 8.447862 | |||||
| Section 1-15 disconnected | R23-24 | 381.1 | 3.268152 | — | — | ||
| R17-23 | 381.1 | 3.977966 | |||||
| R24-23 | 4293.5 | 1.230654 | — | — | |||
| R6-24 | 4293.5 | 1.434478 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elsadd, M.A.; Zobaa, A.F.; Khattab, H.A.; Abd El Aziz, A.M.; Fetouh, T. Communicationless Overcurrent Relays Coordination for Active Distribution Network Considering Fault Repairing Periods. Energies 2023, 16, 7862. https://doi.org/10.3390/en16237862
Elsadd MA, Zobaa AF, Khattab HA, Abd El Aziz AM, Fetouh T. Communicationless Overcurrent Relays Coordination for Active Distribution Network Considering Fault Repairing Periods. Energies. 2023; 16(23):7862. https://doi.org/10.3390/en16237862
Chicago/Turabian StyleElsadd, Mahmoud A., Ahmed F. Zobaa, Heba A. Khattab, Ahmed M. Abd El Aziz, and Tamer Fetouh. 2023. "Communicationless Overcurrent Relays Coordination for Active Distribution Network Considering Fault Repairing Periods" Energies 16, no. 23: 7862. https://doi.org/10.3390/en16237862