
Efficiency Increase through Model Predictive Thermal Control of Electric Vehicle Powertrains

 ,
, 
Abstract
:1. Introduction
- Energy management through economic model predictive thermal control for BEV application;
- Controlling the temperature of the motor and inverter to utilise temperature-dependent efficiencies, especially by closing the shutter for faster heating;
- Reduced pump and fan power draw, as well as decreased shutter-based drag force by optimal control;
- Detailed controller-oriented modelling of the vehicle and thermal system, as well as the motor and inverter, including system-level validation;
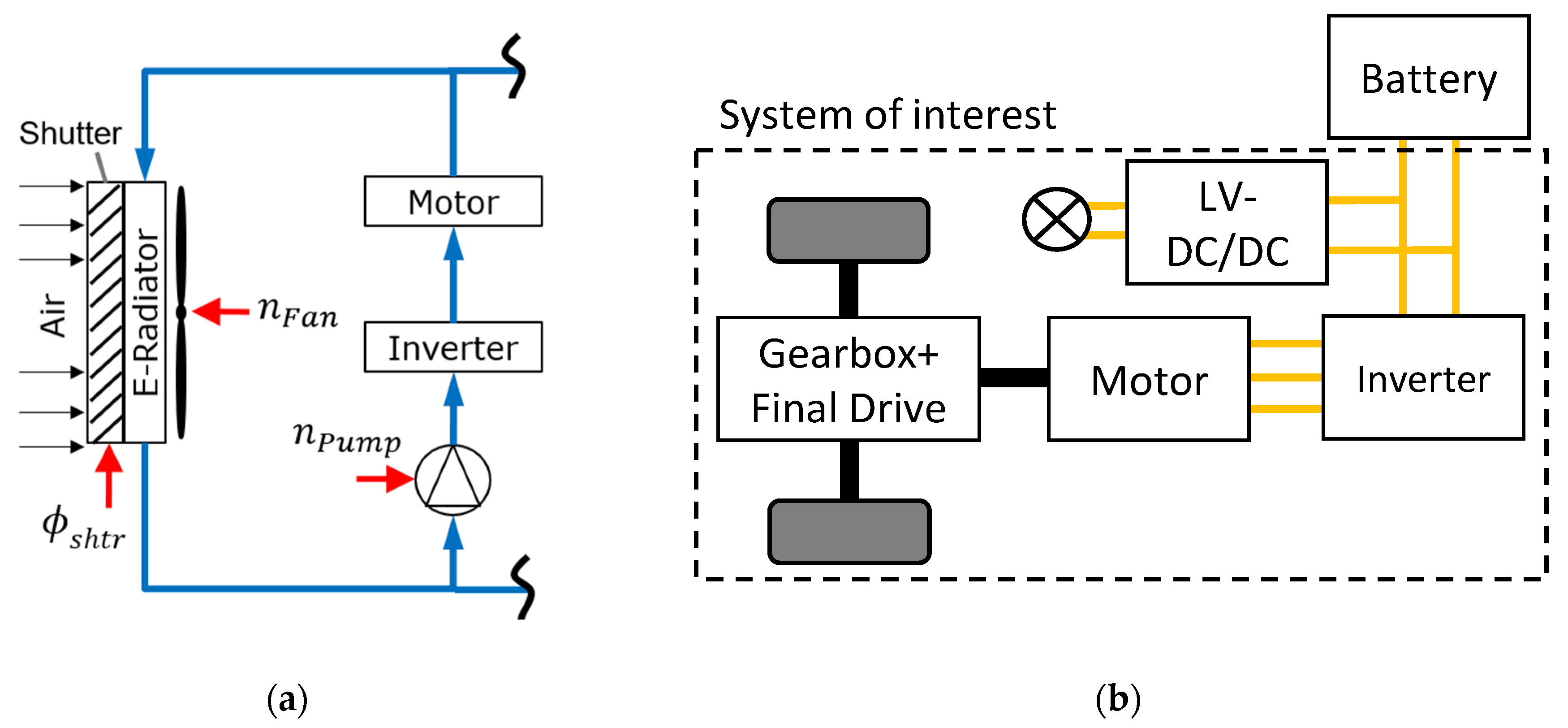
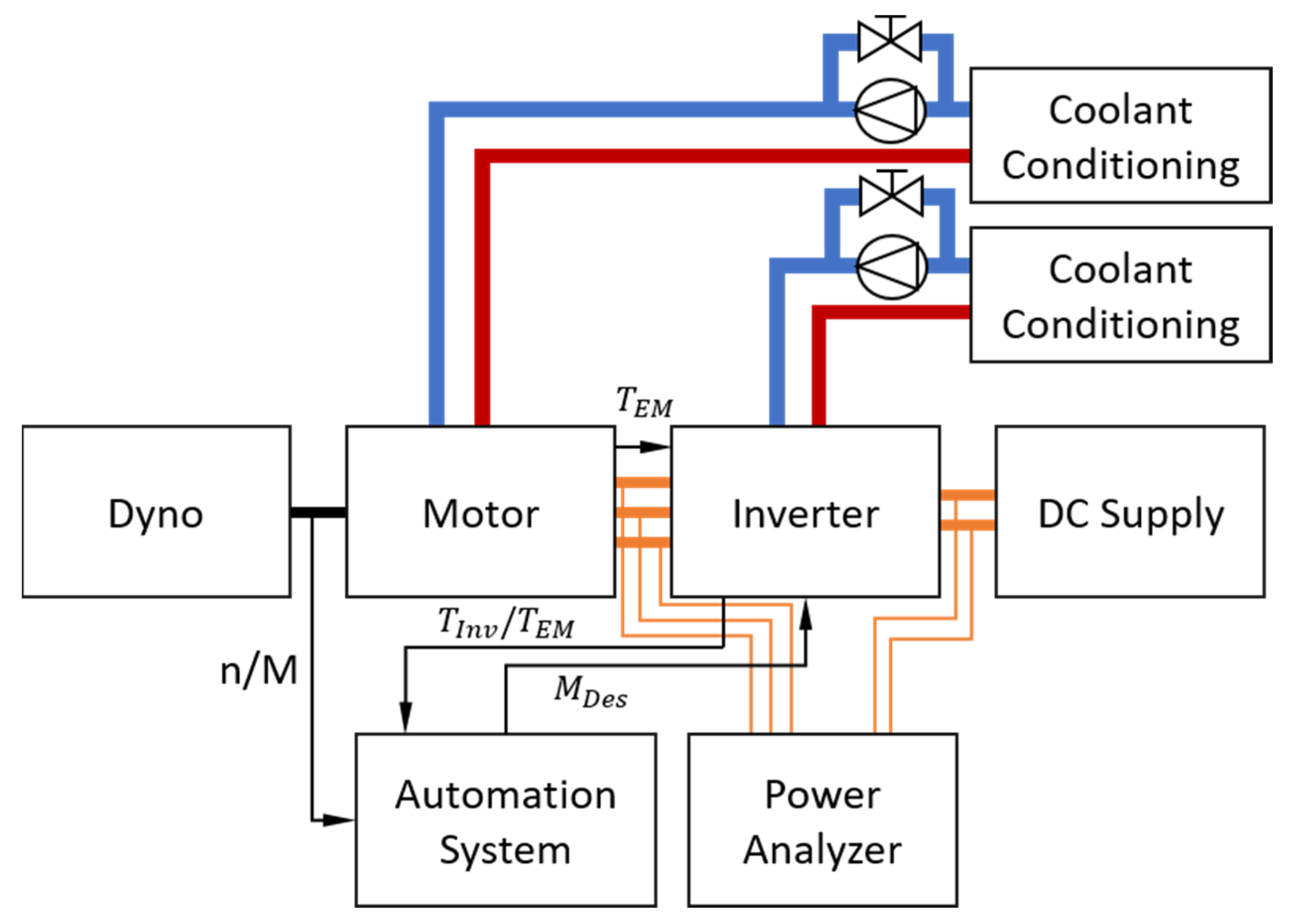
2. Overview of the Setup
3. Model Predictive Control as a Method for Controlling Temperatures of the Powertrain
4. Discussion of Temperature-Dependent Electrical Efficiencies of Motor and Inverter
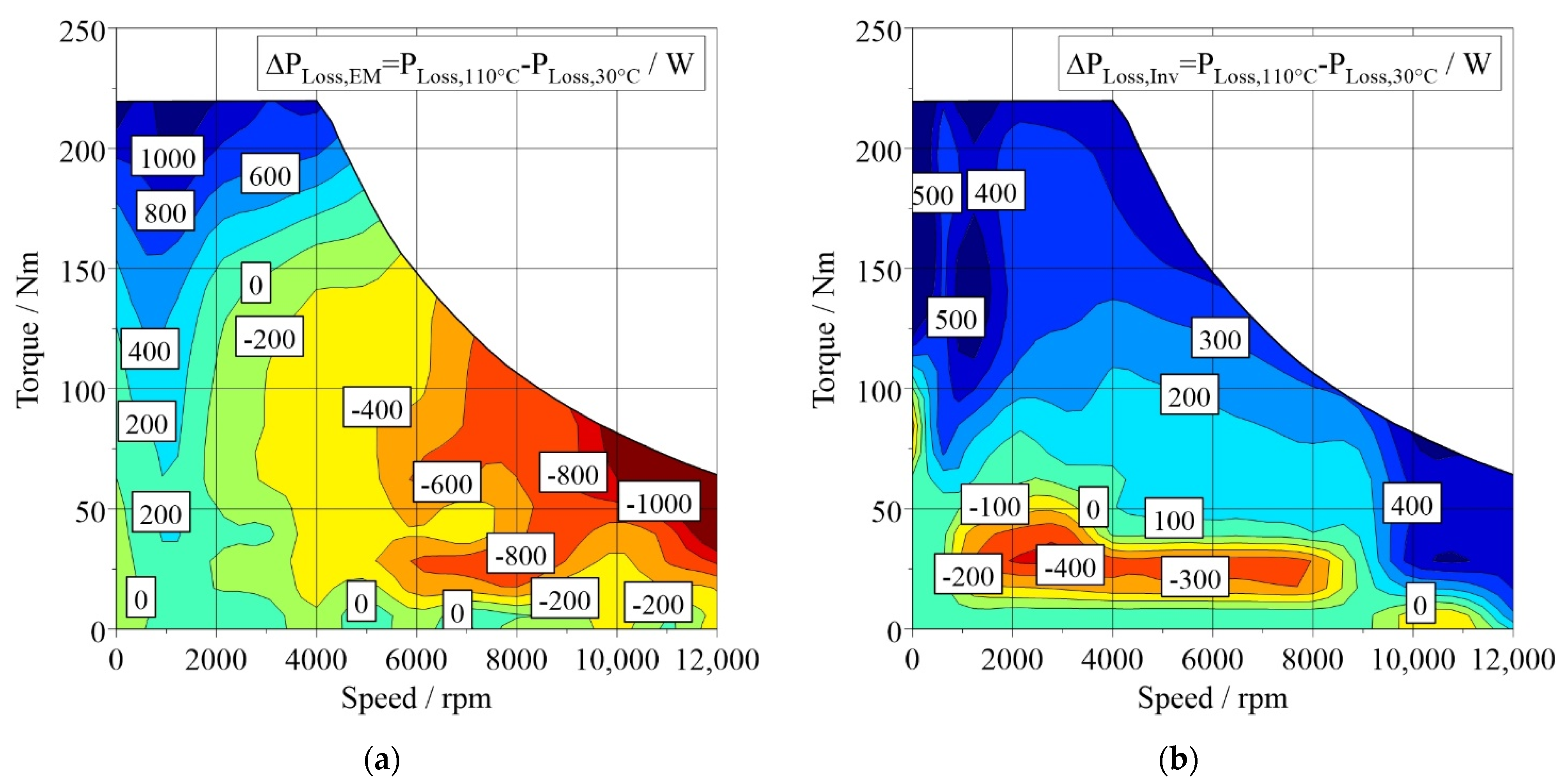
4.1. Temperature-Dependent Motor Losses
4.2. Temperature-Dependent Inverter Losses
5. System Modelling and Validation
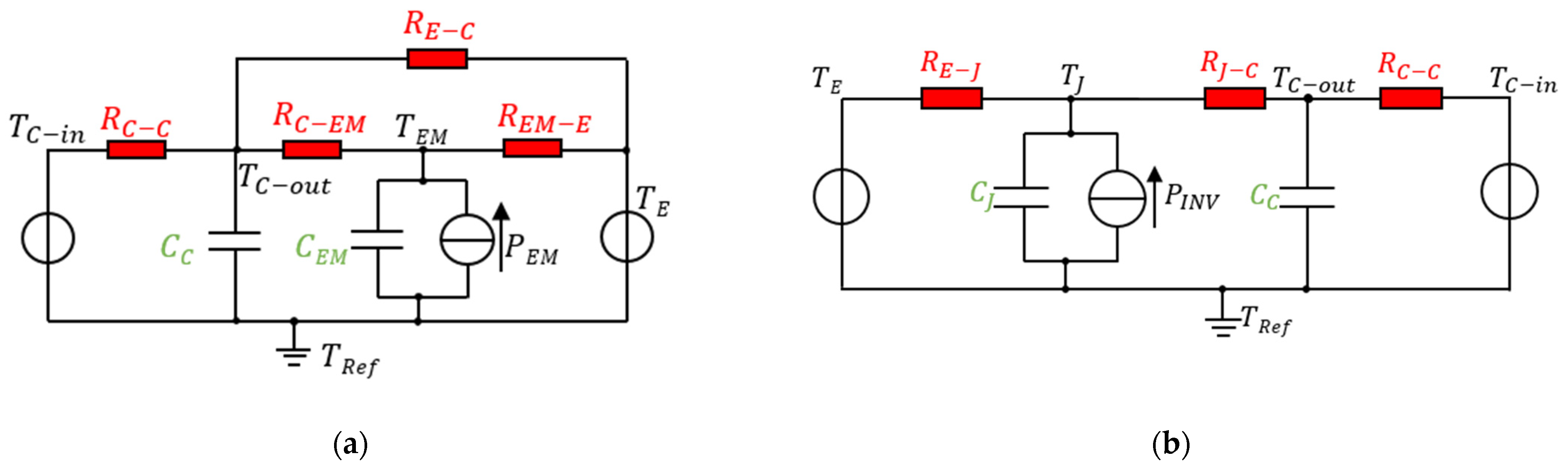
5.1. Thermal and Electrical Modelling of Motor and Inverter
5.2. Modelling of Thermal System Components
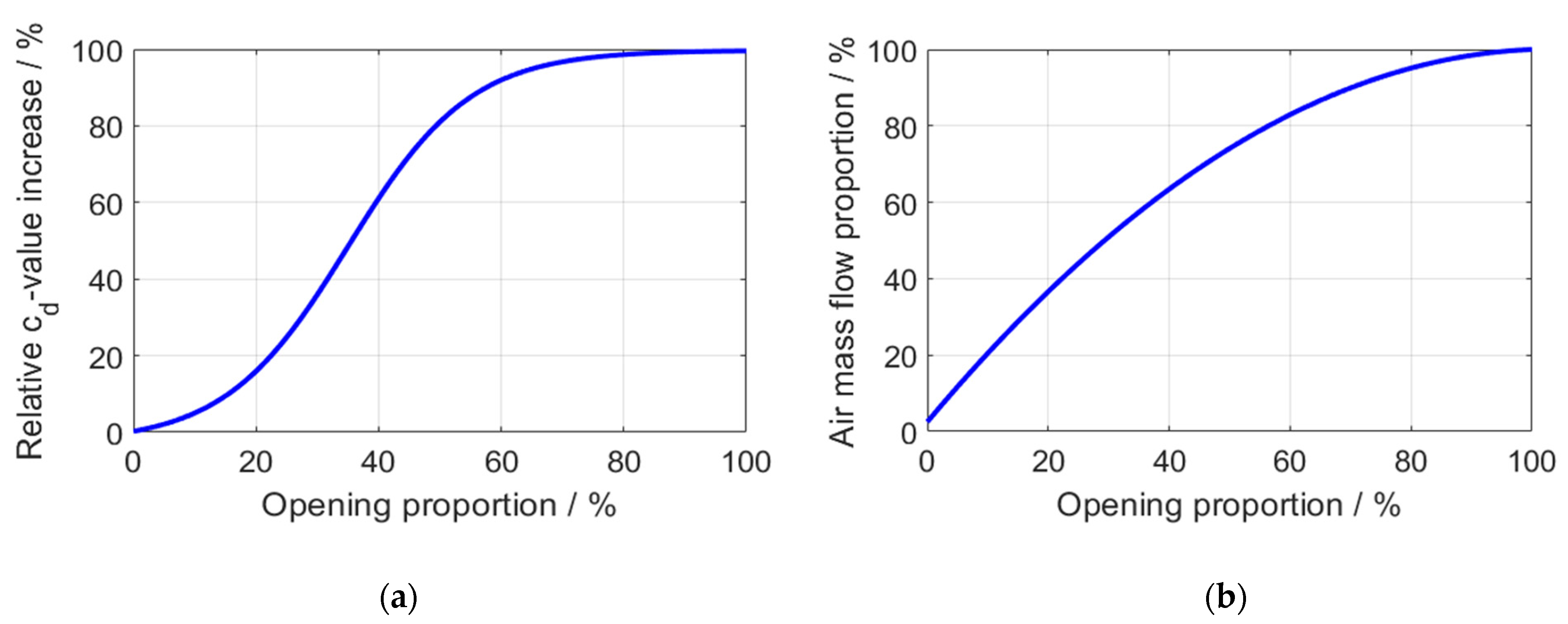
5.3. Active Grille Shutter (AGS)
5.4. System-Level Model Validation
6. Simulation Results: Efficiency Increase Using Model Predictive Control
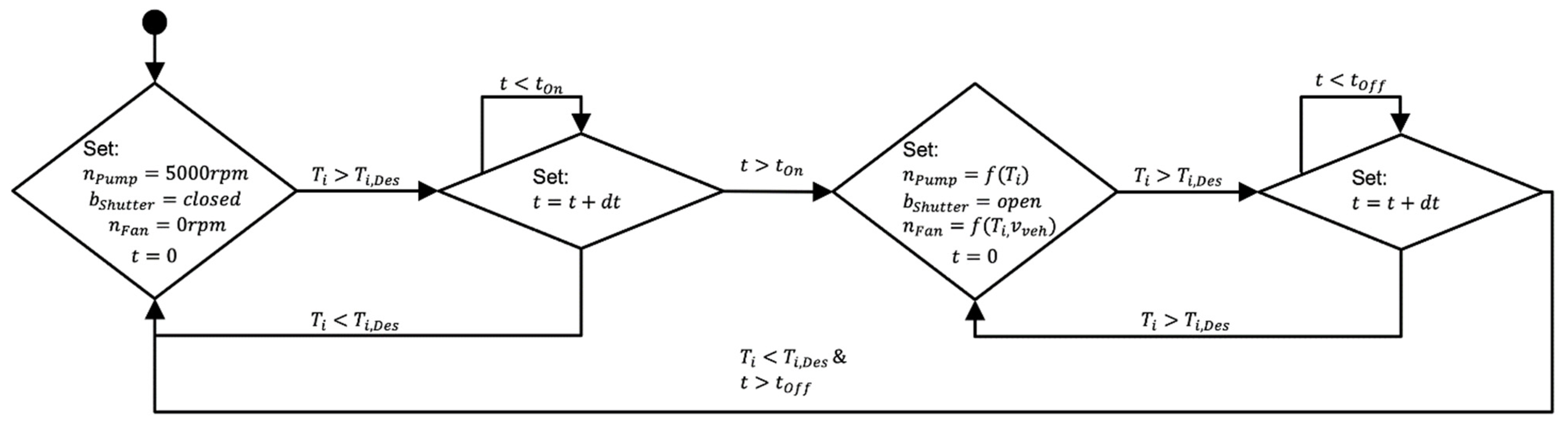
6.1. Introduction: Driving Cycles and Rule-Based Baseline Strategy
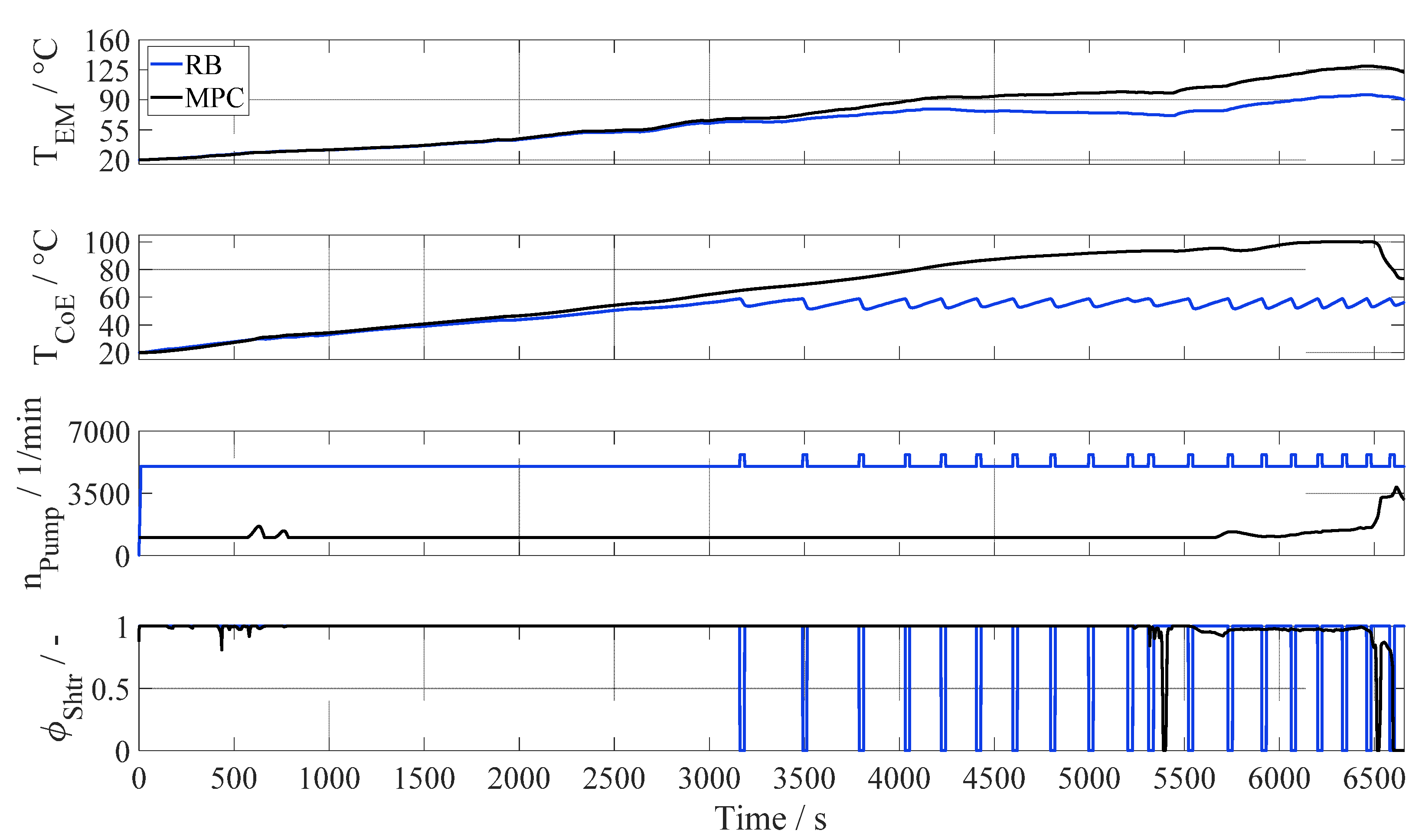
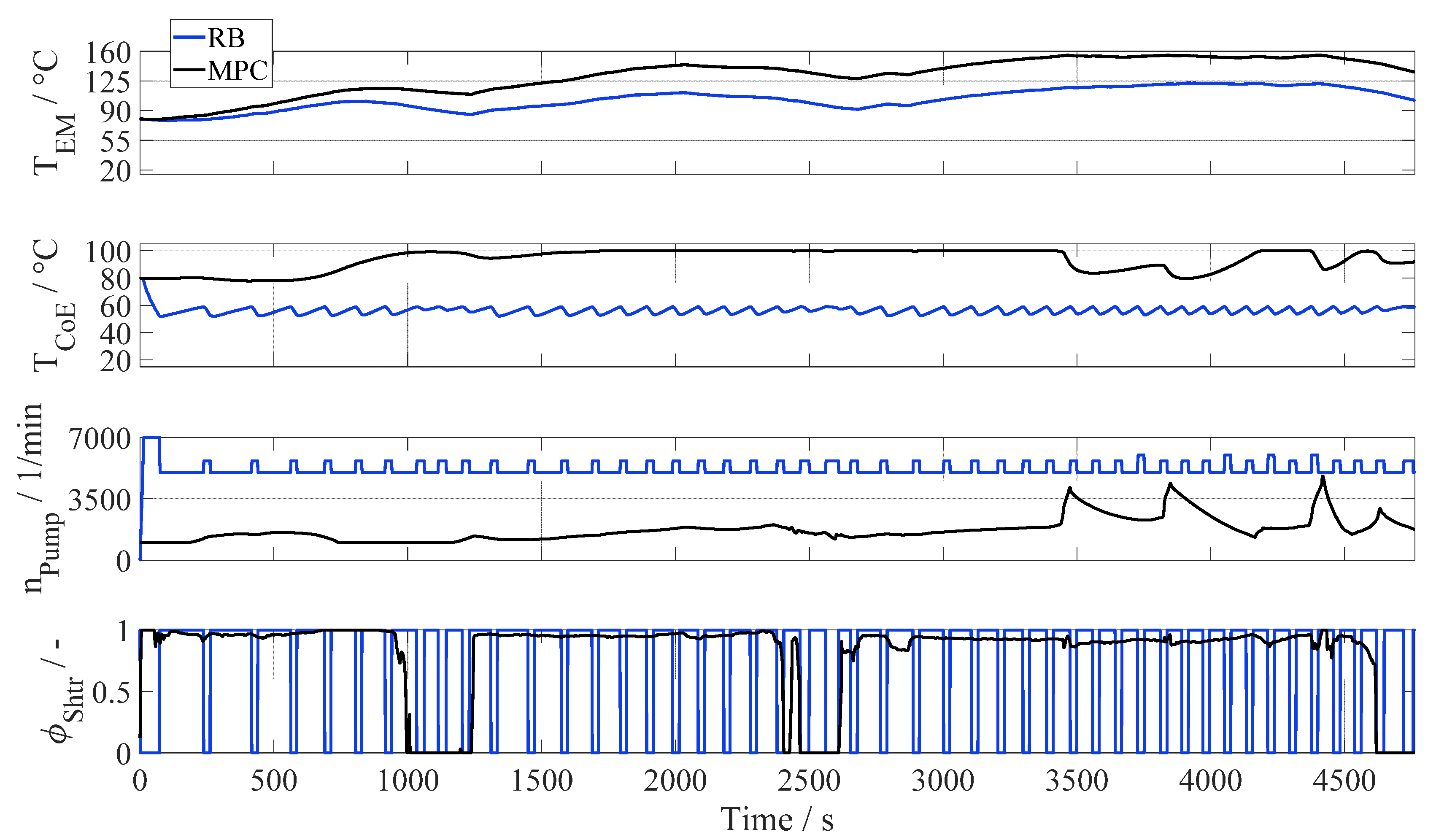
6.2. Evaluation of the Potential of the Economic Model Predictive Control
7. Conclusions
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Energy Agency. Global EV Outlook 2020. Available online: https://www.iea.org/reports/global-ev-outlook-2020 (accessed on 27 January 2022).
- Deloitte. 2021 Global Automotive Consumer Study. Available online: https://www2.deloitte.com/content/dam/Deloitte/us/Documents/manufacturing/us-2021-global-automotive-consumer-study-global-focus-countries.pdf (accessed on 27 January 2022).
- Yang, Y.; Tan, Z.; Ren, Y. Research on Factors That Influence the Fast Charging Behavior of Private Battery Electric Vehicles. Sustainability 2020, 12, 3439. [Google Scholar] [CrossRef] [Green Version]
- Macioszek, E. Electric Vehicles—Problems and Issues. In Smart and Green Solutions for Transport Systems, Proceedings of the Scientific And Technical Conference Transport Systems Theory And Practice, Katowice, Poland, 16–18 September 2019; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Macioszek, E. E-mobility Infrastructure in the Górnośląsko—Zagłębiowska Metropolis, Poland, and Potential for Development. In Proceedings of the 5th World Congress on New Technologies, Lisbon, Portugal, 18–20 August 2019. [Google Scholar] [CrossRef]
- Ling, Z.; Cherry, C.R.; Wen, Y. Determining the Factors That Influence Electric Vehicle Adoption: A Stated Preference Survey Study in Beijing, China. Sustainability 2021, 13, 11719. [Google Scholar] [CrossRef]
- De Cauwer, C.; Verbeke, W.; Coosemans, T.; Faid, S.; van Mierlo, J. A Data-Driven Method for Energy Consumption Prediction and Energy-Efficient Routing of Electric Vehicles in Real-World Conditions. Energies 2017, 10, 608. [Google Scholar] [CrossRef] [Green Version]
- Tomaszewska, A.; Chu, Z.; Feng, X.; O’Kane, S.; Liu, X.; Chen, J.; Ji, C.; Endler, E.; Li, R.; Liu, L.; et al. Lithium-ion battery fast charging: A review. eTransportation 2019, 1, 100011. [Google Scholar] [CrossRef]
- Uniresearch, B.V. CEVOLVER—Connected Electric Vehicle Optimized for Life, Value, Efficiency and Range. Project Homepage. Available online: https://cevolver.eu/ (accessed on 29 January 2022).
- Brandes, H.; Faye, I.; Döges, V. Analysis of electric vehicle design and travel based on long trip capabilities. In Proceedings of the 8th Transport Research, Helsinki, Finland, 27–30 April 2020. [Google Scholar]
- Drgoňa, J.; Arroyo, J.; Cupeiro Figueroa, I.; Blum, D.; Arendt, K.; Kim, D.; Ollé, E.P.; Oravec, J.; Wetter, M.; Vrabie, D.L.; et al. All you need to know about model predictive control for buildings. Annu. Rev. Control 2020, 50, 190–232. [Google Scholar] [CrossRef]
- Dong, B.; Lam, K.P. A real-time model predictive control for building heating and cooling systems based on the occupancy behavior pattern detection and local weather forecasting. Build. Simul. 2014, 7, 89–106. [Google Scholar] [CrossRef]
- Oldewurtel, F.; Parisio, A.; Jones, C.N.; Gyalistras, D.; Gwerder, M.; Stauch, V.; Lehmann, B.; Morari, M. Use of model predictive control and weather forecasts for energy efficient building climate control. Energy Build. 2012, 45, 15–27. [Google Scholar] [CrossRef] [Green Version]
- Suda, T.; Namerikawa, T. Robust prediction and MPC-based optimal energy management for HVAC System. IFAC-PapersOnLine 2018, 51, 472–477. [Google Scholar] [CrossRef]
- Paffumi, E.; Otura, M.; Centurelli, M.; Casellas, R.; Brenner, A.; Jahn, S. Driving Range and Cabin Temperature Performances at Different Ambient Conditions in Support to the Design of a User-Centric Efficient Electric Vehicle: The QUIET Project. In Proceedings of the 14th Conference on Sustainable Development of Energy, Water and Environment Systems 2019, Dubrovnik, Croatia, 1–6 October 2019. [Google Scholar]
- Wang, M.; Craig, T.; Wolfe, E.; LaClair, T.J.; Gao, Z.; Levin, M.; Demitroff, D.; Shaikh, F. Integration and Validation of a Thermal Energy Storage System for Electric Vehicle Cabin Heating; SAE Technical Paper 2017-01-0183; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Lohse-Busch, H.; Duoba, M.; Rask, E.; Stutenberg, K.; Gowri, V.; Slezak, L.; Anderson, D. Ambient Temperature (20°F, 72°F and 95°F) Impact on Fuel and Energy Consumption for Several Conventional Vehicles, Hybrid and Plug-In Hybrid Electric Vehicles and Battery Electric Vehicle; SAE Technical Paper 2013-01-1462; SAE International: Warrendale, PA, USA, 2013. [Google Scholar] [CrossRef]
- Chowdhury, S.; Leitzel, L.; Zima, M.; Santacesaria, M.; Titov, G.; Lustbader, J.; Rugh, J.; Winkler, J.; Khawaja, A.; Govindarajalu, M. Total Thermal Management of Battery Electric Vehicles (BEVs); SAE Technical Paper 2018-37-0026; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef] [Green Version]
- De Nunzio, G.; Sciarretta, A.; Steiner, A.; Mladek, A. Thermal management optimization of a heat-pump-based HVAC system for cabin conditioning in electric vehicles. In Proceedings of the 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 April 2018; pp. 1–7, ISBN 978-1-5386-5966-3. [Google Scholar]
- Dvorak, D.; Basciotti, D.; Gellai, I. Demand-Based Control Design for Efficient Heat Pump Operation of Electric Vehicles. Energies 2020, 13, 5440. [Google Scholar] [CrossRef]
- Amini, M.R.; Sun, J.; Kolmanovsky, I. Two-Layer Model Predictive Battery Thermal and Energy Management Optimization for Connected and Automated Electric Vehicles. 2018. Available online: http://arxiv.org/pdf/1809.10002v1 (accessed on 27 January 2022).
- Park, S.; Ahn, C. Computationally Efficient Stochastic Model Predictive Controller for Battery Thermal Management of Electric Vehicle. IEEE Trans. Veh. Technol. 2020, 69, 8407–8419. [Google Scholar] [CrossRef]
- Lopez Sanz, J.; Ocampo-Martinez, C.; Alvarez-Florez, J.; Moreno Eguilaz, M.; Ruiz-Mansilla, R.; Kalmus, J.; Graber, M.; Lux, G. Nonlinear Model Predictive Control for Thermal Management in Plug-in Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2016, 66, 3632–3644. [Google Scholar] [CrossRef]
- Negandhi, V.; Jung, D.; Shutty, J. Active Thermal Management with a Dual Mode Coolant Pump. SAE Int. J. Passeng. Cars—Mech. Syst. 2013, 6, 817–825. [Google Scholar] [CrossRef]
- Karnik, A.Y.; Fuxman, A.; Bonkoski, P.; Jankovic, M.; Pekar, J. Vehicle Powertrain Thermal Management System Using Model Predictive Control. SAE Int. J. Mater. Manf. 2016, 9, 525–533. [Google Scholar] [CrossRef]
- Karnik, A.; Pachner, D.; Fuxman, A.M.; Germann, D.; Jankovic, M.; House, C. Model Predictive Control for Engine Powertrain Thermal Management Applications; SAE Technical Paper 2015-01-0336; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- Hemmati, S.; Doshi, N.; Hanover, D.; Morgan, C.; Shahbakhti, M. Integrated cabin heating and powertrain thermal energy management for a connected hybrid electric vehicle. Appl. Energy 2021, 283, 116353. [Google Scholar] [CrossRef]
- Wei, C.; Hofman, T.; Ilhan Caarls, E.; van Iperen, R. Integrated Energy and Thermal Management for Electrified Powertrains. Energies 2019, 12, 2058. [Google Scholar] [CrossRef] [Green Version]
- FEV GmbH. Smart Smart Wheels: Mobil im Internet der Energie. Available online: https://www.tib.eu/de/suchen/id/TIBKAT:796892903?cHash=1c0b077b1aac701cdff3227bbe895fad (accessed on 1 January 2022).
- Wulff, C.; Manns, P.; Pischinger, S. Optimum Cooling Circuit Control for Electric Drivetrains for Increased Driving Range. In Proceedings of the 28th Aachen Colloquium Automobile and Engine Technology, Aachen, Germany, 7–9 October 2019; pp. 1365–1377. [Google Scholar]
- Pierburg Pump Technology GmbH. CWA 100-2: Electrical Water Pump. Available online: https://www.tecomotive.com/de/produkte/CWA100.html (accessed on 27 January 2022).
- Holger Schmidt. Technical Data And Startup: DMC514, DMC524, DMC534, DMC544. Available online: https://manualzz.com/doc/7452231/2---brusa (accessed on 27 January 2022).
- BRUSA. HSM1—Hybrid Synchronous Motor: Optimum Performance from Zero Speed. Available online: https://www.brusa.biz/portfolio/hsm1-6-17-12/ (accessed on 27 January 2022).
- Albin Rajasingham, T. Nonlinear Model Predictive Control of Combustion Engines: From Fundamentals to Applications, 1st ed.; Springer International Publishing: Cham, Switzerland, 2021; ISBN 978-3-030-68009-1. [Google Scholar]
- Grüne, L.; Pannek, J. Nonlinear Model Predictive Control: Theory and Algorithms, 2nd ed.; Springer International Publishing: Cham, Switzerland, 2016; ISBN 978-3-319-46024-6. [Google Scholar]
- Ellis, M.; Liu, J.; Christofides, P.D. Economic Model Predictive Control: Theory, Formulations and Chemical Process Applications; Springer International Publishing: Cham, Switzerland, 2017; ISBN 978-3-319-41108-8. [Google Scholar]
- Rawlings, J.B.; Mayne, D.Q.; Diehl, M. Model Predictive Control: Theory, Computation, and Design, 2nd ed.; Nob Hill Publishing: Madison, WI, USA, 2017; ISBN 9780975937730. [Google Scholar]
- Verschueren, R.; Frison, G.; Kouzoupis, D.; Frey, J.; van Duijkeren, N.; Zanelli, A.; Novoselnik, B.; Albin, T.; Quirynen, R.; Diehl, M. Acados: A Modular Open-Source Framework for Fast Embedded Optimal Control. 2019. Available online: http://arxiv.org/pdf/1910.13753v3 (accessed on 27 January 2022).
- Frison, G.; Kouzoupis, D.; Sartor, T.; Zanelli, A.; Diehl, M. BLASFEO: Basic linear algebra subroutines for embedded optimization. ACM Trans. Math. Softw. 2018, 44, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Frison, G.; Diehl, M. Hpipm: A High-Performance Quadratic Programming Framework for Model Predictive Control. 2020. Available online: http://arxiv.org/pdf/2003.02547v2 (accessed on 27 January 2022).
- Verschueren, R.; Zanon, M.; Quirynen, R.; Diehl, M. A Sparsity Preserving Convexification Procedure for Indefinite Quadratic Programs Arising in Direct Optimal Control. SIAM J. Optim. 2017, 27, 2085–2109. [Google Scholar] [CrossRef]
- Yang, Y.; Bilgin, B.; Kasprzak, M.; Nalakath, S.; Sadek, H.; Preindl, M.; Cotton, J.; Schofield, N.; Emadi, A. Thermal management of electric machines. IET Electr. Syst. Transp. 2017, 7, 104–116. [Google Scholar] [CrossRef] [Green Version]
- Bauer, D. Verlustanalyse bei Elektrischen Maschinen für Elektro- und Hybridfahrzeuge zur Weiterverarbeitung in Thermischen Netzwerkmodellen; Springer: Wiesbaden, Germany, 2019; ISBN 978-3-658-24271-8. [Google Scholar]
- Dutta, R.; Chong, L.; Rahman, F.M. Analysis and Experimental Verification of Losses in a Concentrated Wound Interior Permanent Magnet Machine. PIER B 2013, 48, 221–248. [Google Scholar] [CrossRef] [Green Version]
- Németh-Csóka, M. Thermisches Management elektrischer Maschinen; Springer: Wiesbaden, Germany, 2018; ISBN 978-3-658-20132-6. [Google Scholar]
- Binder, A. Elektrische Maschinen und Antriebe; Springer: Berlin/Heidelberg, Germany, 2012; ISBN 978-3-540-71849-9. [Google Scholar]
- Baranski, M.; Szelag, W.; Lyskawinski, W. Analysis of the Partial Demagnetization Process of Magnets in a Line Start Permanent Magnet Synchronous Motor. Energies 2020, 13, 5562. [Google Scholar] [CrossRef]
- Ehsani, M.; Wang, F.-Y.; Brosch, G.L. (Eds.) Transportation Technologies for Sustainability; Springer: New York, NY, USA, 2013; ISBN 978-1-4614-5843-2. [Google Scholar]
- Doppelbauer, M. Grundlagen der Elektromobilität; Springer: Wiesbaden, Germany, 2020; ISBN 978-3-658-29729-9. [Google Scholar]
- Das, S.C.; Narayanan, G.; Tiwari, A. Experimental study on the dependence of IGBT switching energy loss on DC link voltage. In Proceedings of the 2014 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Mumbai, India, 16–19 December 2014. [Google Scholar] [CrossRef]
- Yang, J.; Che, Y.; Ran, L.; Jiang, H. Evaluation of Frequency and Temperature Dependence of Power Losses Difference in Parallel IGBTs. IEEE Access 2020, 8, 104074–104084. [Google Scholar] [CrossRef]
- Kolar, J.; Drofenik, U. A General Scheme for Calculating Switching- and Conduction-Losses of Power Semiconductors in Numerical Circuit Simulations of Power Electronic Systems. In Proceedings of the International Power Electronics Conference, Niigata, Japan, 4–8 April 2005. [Google Scholar]
- Wallscheid, O. Thermal Monitoring of Electric Motors: State-of-the-Art Review and Future Challenges. IEEE Open J. Ind. Applicat. 2021, 2, 204–223. [Google Scholar] [CrossRef]
- Chen, B.; Wulff, C.; Etzold, K.; Manns, P.; Birmes, G.; Andert, J.; Pischinger, S. A Comprehensive Thermal Model For System-Level Electric Drivetrain Simulation With Respect To Heat Exchange Between Components. In Proceedings of the 2020 19th IEEE Intersociety Conference on Thermal and Thermomechanical Phenomena in Electronic Systems (ITherm), Orlando, FL, USA, 21–23 July 2020; pp. 558–567, ISBN 978-1-7281-9764-7. [Google Scholar]
- Demetriades, G.D.; De La Parra, H.Z.; Andersson, E.; Olsson, H. A Real-Time Thermal Model of a Permanent-Magnet Synchronous Motor. IEEE Trans. Power Electron. 2010, 25, 463–474. [Google Scholar] [CrossRef]
- Huber, T.; Bocker, J.; Peters, W. A Low-order Thermal Model for Monitoring Critical Temperatures in Permanent Magnet Synchronous Motors. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–6, ISBN 978-1-84919-815-8. [Google Scholar]
- Boglietti, A.; Cavagnino, A.; Staton, D.; Shanel, M.; Mueller, M.; Mejuto, C. Evolution and Modern Approaches for Thermal Analysis of Electrical Machines. IEEE Trans. Ind. Electron. 2009, 56, 871–882. [Google Scholar] [CrossRef] [Green Version]
- Scheuermann, U. AN1501: Estimation of Liquid Cooled Heat Sink Performance at Different Operation Conditions. Available online: https://www.semikron.com/dl/service-support/downloads/download/semikron-application-note-estimation-of-liquid-cooled-heat-sink-performance-at-different-operation-conditions-en-2015-10-16-rev-00/ (accessed on 27 January 2022).
- Wu, R.; Wang, H.; Pedersen, K.B.; Ma, K.; Ghimire, P.; Iannuzzo, F.; Blaabjerg, F. A Temperature-Dependent Thermal Model of IGBT Modules Suitable for Circuit-Level Simulations. IEEE Trans. Ind. Applicat. 2016, 52, 3306–3314. [Google Scholar] [CrossRef] [Green Version]
- MathWorks. Curve Fitting Toolbox: User’s Guide; MathWorks: Natick, MA, USA.
- Bergman, T.L.; Incropera, F.P.; De Witt, T.P.; Lavine, A.S. Fundamentals of Heat and Mass Transfer, 6th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007; ISBN 978-0471457282. [Google Scholar]
- Shah, R.K.; Sekulić, D.P. Fundamentals of Heat Exchanger Design; John Wiley & Sons: New York, NY, USA/Chichester, UK, 2003; ISBN 0-471-32171-0. [Google Scholar]
- Großmann, H. Pkw-Klimatisierung. Springer: Berlin/Heidelberg, Germany, 2013; ISBN 978-3-642-39840-7. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: Boston, MA, USA, 2012; ISBN 978-1-4614-1432-2. [Google Scholar]
- Pfeifer, C. Evolution of Active Grille Shutters; SAE Technical Paper 2014-01-0633; SAE International: Warrendale, PA, USA, 2014. [Google Scholar] [CrossRef]
- Bouilly, J.; Lafossas, F.; Mohammadi, A.; van Wissen, R. Evaluation of Fuel Economy Potential of an Active Grille Shutter by the Means of Model Based Development Including Vehicle Heat Management. SAE Int. J. Engines 2015, 8, 2394–2401. [Google Scholar] [CrossRef]
- Cho, Y.-C.; Chang, C.-W.; Shestopalov, A.; Tate, E. Optimization of Active Grille Shutters Operation for Improved Fuel Economy. SAE Int. J. Passeng. Cars—Mech. Syst. 2017, 10, 563–572. [Google Scholar] [CrossRef]
- El-Sharkawy, A.E.; Kamrad, J.C.; Lounsberry, T.H.; Baker, G.L.; Rahman, S.S. Evaluation of Impact of Active Grille Shutter on Vehicle Thermal Management. SAE Int. J. Mater. Manf. 2011, 4, 1244–1254. [Google Scholar] [CrossRef]
- Wolf, T. Developing a Theory for Active Grille Shutter Aerodynamics—Part 1: Base Theory; SAE Technical Paper 2019-01-5063; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Kremheller, A. The Aerodynamics Development of the New Nissan Qashqai; SAE Technical Paper 2014-01-0572; SAE International: Warrendale, PA, USA, 2014. [Google Scholar] [CrossRef]
- Blacha, T.; Islam, M. The Aerodynamic Development of the New Audi Q5. SAE Int. J. Passeng. Cars—Mech. Syst. 2017, 10, 638–648. [Google Scholar] [CrossRef]
- Larose, G.; Belluz, L.; Whittal, I.; Belzile, M.; Klomp, R.; Schmitt, A. Evaluation of the Aerodynamics of Drag Reduction Technologies for Light-duty Vehicles: A Comprehensive Wind Tunnel Study. SAE Int. J. Passeng. Cars—Mech. Syst. 2016, 9, 772–784. [Google Scholar] [CrossRef]
- Larson, L.; Woodiga, S.; Gin, R.; Lietz, R. Aerodynamic Investigation of Cooling Drag of a Production Sedan Part 1: Test Results. SAE Int. J. Passeng. Cars—Mech. Syst. 2017, 10, 628–637. [Google Scholar] [CrossRef]
- Klingbeil, M.; Weissert, J.; Yilmaz, Z. The new Porsche 911 Carrera—Evolution in aerodynamics, thermal management and heat protection. In 16. Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.-C., Wiedemann, J., Eds.; Springer: Wiesbaden, Germany, 2016; pp. 315–330. ISBN 978-3-658-13254-5. [Google Scholar]
- Feng, L.; Wikander, J.; Li, Z. Fuel Minimization of the Electric Engine Cooling System With Active Grille Shutter by Iterative Quadratic Programming. IEEE Trans. Veh. Technol. 2020, 69, 2621–2635. [Google Scholar] [CrossRef]
- Li, J.; Deng, Y.; Wang, Y.; Su, C.; Liu, X. CFD-Based research on control strategy of the opening of Active Grille Shutter on automobile. Case Stud. Therm. Eng. 2018, 12, 390–395. [Google Scholar] [CrossRef]
- Shigarkanthi, V.; Damodaran, V.; Soundararaju, D.; Kanniah, K. Application of Design of Experiments and Physics Based Approach in the Development of Aero Shutter Control Algorithm; SAE Technical Paper 2011-01-0155; SAE International: Warrendale, PA, USA, 2011. [Google Scholar] [CrossRef]
- Scherer, A. Neuronale Netze; Vieweg+Teubner Verlag: Wiesbaden, Germany, 1997; ISBN 978-3-528-05465-6. [Google Scholar]
- Wolf, T. Developing a Theory for Active Grille Shutter Aerodynamics—Part 2: Effect of Flap Thickness and Shape; SAE Technical Paper 2019-01-5095; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Ngo, C.; Solano-Araque, E.; Aguado-Rojas, M.; Sciarretta, A.; Chen, B.; Baghdadi, M.E. Real-time eco-driving for connected electric vehicles. IFAC-PapersOnLine 2021, 54, 126–131. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Parameter | Value |
|---|---|
| Vehicle type | BEV |
| [kg] | 1335 |
| [-] | 9.59 |
| [-] | 0.325 |
| Front area: A [m2] | 2.1 |
| [m] | 0.27 |
| [-] | 0.0107 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wahl, A.; Wellmann, C.; Krautwig, B.; Manns, P.; Chen, B.; Schernus, C.; Andert, J. Efficiency Increase through Model Predictive Thermal Control of Electric Vehicle Powertrains. Energies 2022, 15, 1476. https://doi.org/10.3390/en15041476
Wahl A, Wellmann C, Krautwig B, Manns P, Chen B, Schernus C, Andert J. Efficiency Increase through Model Predictive Thermal Control of Electric Vehicle Powertrains. Energies. 2022; 15(4):1476. https://doi.org/10.3390/en15041476
Chicago/Turabian StyleWahl, Alexander, Christoph Wellmann, Björn Krautwig, Patrick Manns, Bicheng Chen, Christof Schernus, and Jakob Andert. 2022. "Efficiency Increase through Model Predictive Thermal Control of Electric Vehicle Powertrains" Energies 15, no. 4: 1476. https://doi.org/10.3390/en15041476