Control of Two Satellites Relative Motion over the Packet Erasure Communication Channel with Limited Transmission Rate Based on Adaptive Coder


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Control and Estimation under Information Constraints
2.1. Problem Description
2.2. Minimum Necessary Data Rate for Estimation and Control
2.3. Coding/Decoding Schemes
2.3.1. Static Binary Quantizer
2.3.2. Zooming Strategies
2.3.3. Coders with Memory
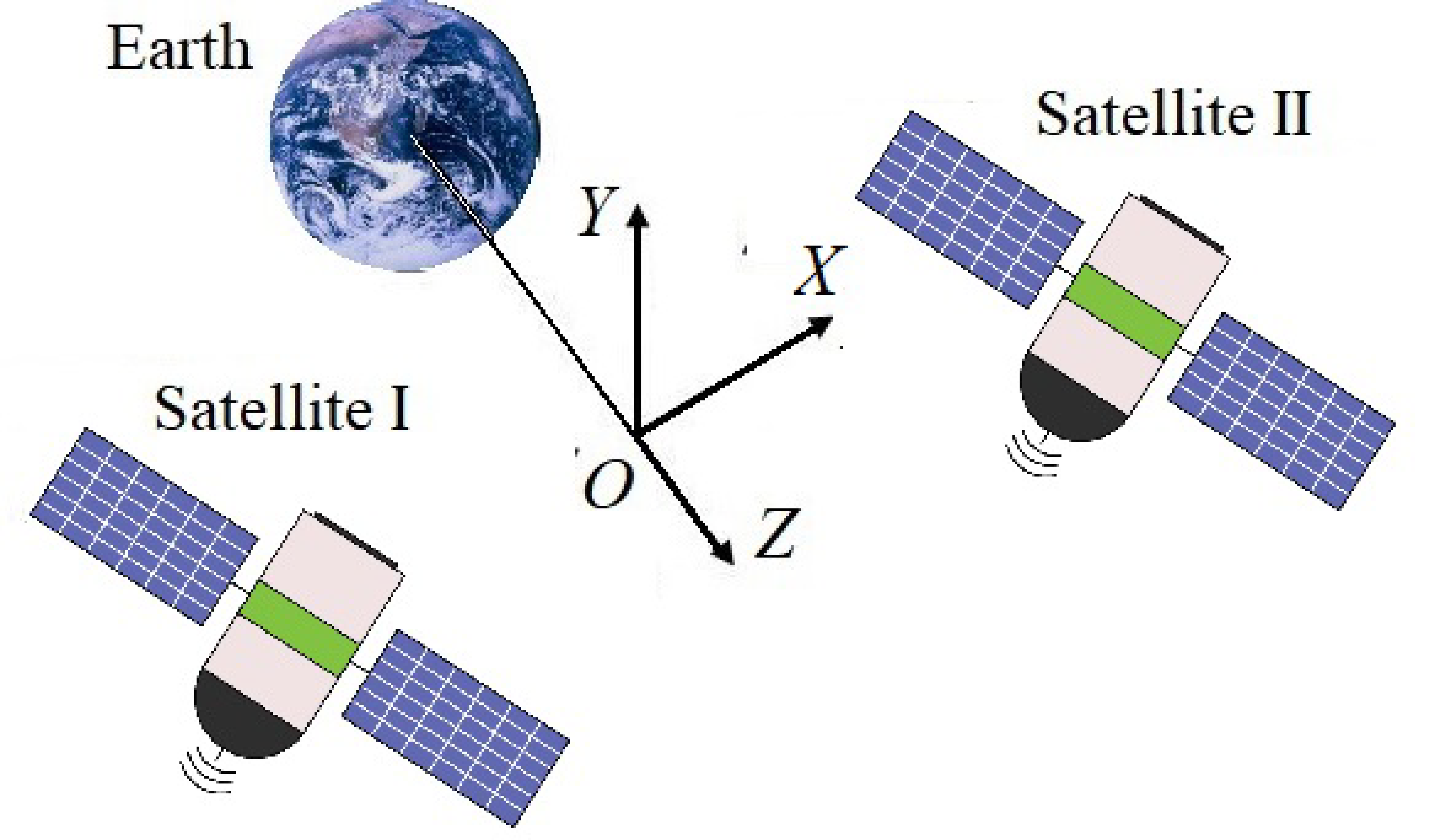
3. Relative Motion Dynamics of Two Satellites in a Near-Circular Orbit
4. Main Result
4.1. Control Law Design
4.2. Adaptive Coding for Transmission of Position Between Satellites in Formation
4.3. Erasure Channel Description
4.4. Numerical Study
4.4.1. Satellite Model Parameters
4.4.2. Simulations for Ideal Communication Channel
4.4.3. Satellite Position Transmission Over the Digital Communication Channel with Finite Capacity
4.4.4. Case of Erasure Communication Channel
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| LTI | Linear Time Invariant |
| DTN | Delay Tolerant Networking |
| MAC | Medium Access Control |
| ECC | Elliptic Curve Cryptography |
| LEO | Low Earth Orbit |
| SDR | Software-defined Radio |
| IRM | Implicit Reference Model |
References
- Chang, I.; Chung, S.J.; Blackmore, L. Cooperative control with adaptive graph Laplacians for spacecraft formation flying. In Proceedings of the IEEE Conference Decision and Control (CDC 2010), Atlanta, GA, USA, 15–17 December 2010; pp. 4926–4933. [Google Scholar] [CrossRef] [Green Version]
- Morgan, D.; Chung, S.J.; Blackmore, L.; Acikmese, B.; Bayard, D.; Hadaegh, F. Swarm-keeping strategies for spacecraft under J2 and atmospheric drag perturbations. J. Guid. Control Dyn. 2012, 35, 1492–1506. [Google Scholar] [CrossRef] [Green Version]
- Monakhova, U.; Ivanov, D.; Roldugin, D. Magnetorquers attitude control for differential aerodynamic force application to nanosatellite formation flying construction and maintenance. Adv. Astronaut. Sci. 2020, 170, 385–397. [Google Scholar]
- Kumar, B.; Ng, A.; Yoshihara, K.; De Ruiter, A. Differential drag as a means of spacecraft formation control. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1125–1135. [Google Scholar] [CrossRef]
- Pérez, D.; Bevilacqua, R. Lyapunov-based Spacecraft Rendezvous Maneuvers using Differential Drag. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; pp. 2011–6630. [Google Scholar]
- Varma, S.; Kumar, K. Multiple satellite formation flying using differential aerodynamic drag. J. Spacecr. Rocket. 2012, 49, 325–336. [Google Scholar] [CrossRef]
- Horsley, M.; Nikolaev, S.; Pertica, A. Small satellite rendezvous using differential lift and drag. J. Guid. Control Dyn. 2013, 36, 445–453. [Google Scholar] [CrossRef]
- Kumar, K.; Misra, A.; Varma, S.; Reid, T.; Bellefeuille, F. Maintenance of satellite formations using environmental forces. Acta Astronaut. 2014, 102, 341–354. [Google Scholar] [CrossRef]
- Dellelce, L.; Kerschen, G. Optimal propellantless rendez-vous using differential drag. Acta Astronaut. 2015, 109, 112–123. [Google Scholar] [CrossRef]
- Ivanov, D.; Monakhova, U.; Ovchinnikov, M. Nanosatellites swarm deployment using decentralized differential drag-based control with communicational constraints. Acta Astronaut. 2019, 159, 646–657. [Google Scholar] [CrossRef]
- Ivanov, D.; Biktimirov, S.; Chernov, K.; Kharlan, A.; Monakhova, U.; Pritykin, D. Writing with Sunlight: Cubesat formation control using aerodynamic forces. In Proceedings of the 70th International Astronautical Congress, Washington, DC, USA, 21–25 October 2019. [Google Scholar]
- Tang, A.; Wu, X. LEO satellite formation flying via differential atmospheric drag. Int. J. Space Sci. Eng. 2019, 5, 289–320. [Google Scholar] [CrossRef]
- Shouman, M.; Bando, M.; Hokamoto, S. Output regulation control for satellite formation flying using differential drag. J. Guid. Control Dyn. 2019, 42, 2220–2232. [Google Scholar] [CrossRef]
- Smith, B.; Capon, C.; Brown, M. Ionospheric drag for satellite formation control. J. Guid. Control Dyn. 2019, 42, 2590–2599. [Google Scholar] [CrossRef]
- Traub, C.; Herdrich, G.; Fasoulas, S. Influence of energy accommodation on a robust spacecraft rendezvous maneuver using differential aerodynamic forces. CEAS Space J. 2020, 12, 43–63. [Google Scholar] [CrossRef]
- Traub, C.; Romano, F.; Binder, T.; Boxberger, A.; Herdrich, G.; Fasoulas, S.; Roberts, P.; Smith, K.; Edmondson, S.; Haigh, S.; et al. On the exploitation of differential aerodynamic lift and drag as a means to control satellite formation flight. CEAS Space J. 2020, 12, 15–32. [Google Scholar] [CrossRef]
- Leonard, C. Formationkeeping of Spacecraft via Differential Drag. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1986. [Google Scholar]
- Kim, D.Y.; Woo, B.; Park, S.Y.; Choi, K.H. Hybrid optimization for multiple-impulse reconfiguration trajectories of satellite formation flying. Adv. Space Res. 2009, 44, 1257–1269. [Google Scholar] [CrossRef]
- Vaddi, S.; Alfriend, K.; Vadali, S.; Sengupta, P. Formation establishment and reconfiguration using impulsive control. J. Guid. Control Dyn. 2005, 28, 262–268. [Google Scholar] [CrossRef]
- Vaddi, S. Modeling and Control of Satellite Formations. Ph.D. Thesis, Department of Aerospace Engineering, Texas A&M University, College Station, TX, USA, 2003. [Google Scholar]
- Monakhova, U.; Ivanov, D. Formation of a Swarm of Nanosatellites Using Decentralized Aerodynamic Control, Taking into Account Communication Constraints; M.V. Keldysh Institute Preprints; Keldysh Institute: Moscow, Russia, 2018; (In Russian). [Google Scholar] [CrossRef]
- Sarno, S.; D’Errico, M.; Guo, J.; Gill, E. Path planning and guidance algorithms for SAR formation reconfiguration: Comparison between centralized and decentralized approaches. Acta Astronaut. 2020, 167, 404–417. [Google Scholar] [CrossRef]
- Basu, S.; Groves, K.; Basu, S.; Sultan, P. Specification and forecasting of scintillations in communication/navigation links: Current status and future plans. J. Atmos. Sol. Terr. Phys. 2002, 64, 1745–1754. [Google Scholar] [CrossRef]
- Freimann, A.; Petermann, T.; Schilling, K. Interference-Free Contact Plan Design for Wireless Communication in Space-Terrestrial Networks. In Proceedings of the 2019 IEEE International Conference on Space Mission Challenges for Information Technology (SMC-IT), Pasadena, CA, USA, 30 July–1 August 2019; pp. 55–61. [Google Scholar] [CrossRef]
- Zhao, Y.; Yi, X.; Hou, Z.; Zhang, Y.; Li, C. Parallel data transmission for navigation satellite network with agility link. Int. J. Satell. Commun. Netw. 2019, 37, 536–550. [Google Scholar] [CrossRef]
- Cai, X.; Zhou, M.; Xia, T.; Fong, W.; Lee, W.T.; Huang, X. Low-Power SDR Design on an FPGA for Intersatellite Communications. IEEE Trans. Large Scale Integr. Syst. 2018, 26, 2419–2430. [Google Scholar] [CrossRef]
- Davarian, F.; Asmar, S.; Angert, M.; Baker, J.; Gao, J.; Hodges, R.; Israel, D.; Landau, D.; Lay, N.; Torgerson, L.; et al. Improving Small Satellite Communications and Tracking in Deep Space—A Review of the Existing Systems and Technologies with Recommendations for Improvement. Part II: Small Satellite Navigation, Proximity Links, and Communications Link Science. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 26–40. [Google Scholar] [CrossRef]
- Poomagal, C.; Sathish Kumar, G. ECC Based Lightweight Secure Message Conveyance Protocol for Satellite Communication in Internet of Vehicles (IoV). Wirel. Pers. Commun. 2020, 113, 1359–1377. [Google Scholar] [CrossRef]
- Ujan, S.; Navidi, N.; Landry, R.J. Hierarchical classification method for radio frequency interference recognition and characterization in satcom. Appl. Sci. 2020, 10, 4608. [Google Scholar] [CrossRef]
- Kuang, Y.; Yi, X.; Hou, Z. Congestion avoidance routing algorithm for topology-inhomogeneous low earth orbit satellite navigation augmentation network. Int. J. Satell. Commun. Netw. 2020. [Google Scholar] [CrossRef]
- Nair, G.; Evans, R. Exponential stabilisability of finite-dimensional linear systems with limited data rates. Automatica 2003, 39, 585–593. [Google Scholar] [CrossRef]
- Bazzi, L.; Mitter, S. Endcoding complexity versus minimum distance. IEEE Trans. Inform. Theory 2005, 51, 2103–2112. [Google Scholar] [CrossRef]
- Nair, G.; Fagnani, F.; Zampieri, S.; Evans, R. Feedback control under data rate constraints: An overview. Proc. IEEE 2007, 95, 108–137. [Google Scholar] [CrossRef]
- Matveev, A.; Savkin, A. Estimation and Control over Communication Networks; Birkhäuser: Boston, MA, USA, 2009. [Google Scholar]
- Andrievsky, B.; Matveev, A.; Fradkov, A. Control and estimation under information constraints: Toward a unified theory of control, computation and communications. Autom. Remote Control 2010, 71, 572–633. [Google Scholar] [CrossRef]
- Kwakernaak, H.; Sivan, R. Linear Optimal Control Systems; Wiley-Interscience: New York, NY, USA, 1972. [Google Scholar]
- Nair, G.; Evans, R. Stabilizability of stochastic linear systems with finite feedback data rates. SIAM J. Control Optim. 2004, 43, 413–436. [Google Scholar] [CrossRef] [Green Version]
- Nair, G.; Evans, R.; Mareels, I.; Moran, W. Topological feedback entropy and nonlinear stabilization. IEEE Trans. Automat. Control 2004, 49, 1585–1597. [Google Scholar] [CrossRef]
- Fradkov, A.; Andrievsky, B.; Evans, R. Chaotic observer-based synchronization under information constraints. Phys. Rev. E 2006, 73, 066209. [Google Scholar] [CrossRef] [Green Version]
- Cover, T.; Thomas, J. Elements of Information Theory; John Wiley & Sons, Inc.: New York, NY, USA; Chichester, UK; Brisbane, Australia; Toronto, ON, Canada; Singapore, 1991. [Google Scholar]
- Rizzo, L. Effective Erasure Codes for Reliable Computer Communication Protocols. Comput. Commun. Rev. 1997, 27, 24–36. [Google Scholar] [CrossRef] [Green Version]
- Tatikonda, S.; Mitter, S. Control Over Noisy Channels. IEEE Trans. Automat. Control 2004, 49, 1196–1201. [Google Scholar] [CrossRef]
- Shokrollahi, A. Raptor codes. IEEE Trans. Inform. Theory 2006, 52, 2551–2567. [Google Scholar] [CrossRef]
- Köetter, R.; Kschischang, F. Coding for Errors and Erasures in Random Network Coding. IEEE Trans. Inform. Theory 2008, 54, 3579–3591. [Google Scholar] [CrossRef]
- Patterson, S.; Bamieh, B.; El Abbadi, A. Convergence Rates of Distributed Average Consensus With Stochastic Link Failures. IEEE Trans. Automat. Control 2010, 55, 880–892. [Google Scholar] [CrossRef]
- Diwadkar, A.; Vaidya, U. Robust synchronization in nonlinear network with link failure uncertainty. In Proceedings of the 50th IEEE Conference Decision and Control and European Control Conference (CDC-ECC 2011), Orlando, FL, USA, 12–15 December 2011; IEEE: Orlando, FL, USA, 2011; pp. 6325–6330. [Google Scholar]
- Wang, J.; Yan, Z. Coding scheme based on spherical polar coordinate for control over packet erasure channel. Int. J. Robust Nonlinear Control 2014, 24, 1159–1176. [Google Scholar] [CrossRef]
- Zhang, H.; Lee, S.; Li, X.; He, J. EEG self-adjusting data analysis based on optimized sampling for robot control. Electronics 2020, 9, 925. [Google Scholar] [CrossRef]
- Jeon, S.; Park, C.; Seo, D. The multi-station based variable speed limit model for realization on urban highway. Electronics 2020, 9, 801. [Google Scholar] [CrossRef]
- Tsypkin, Y. Stability and sensitivity of nonlinear sampled data systems. In Sensitivity Methods in Control Theory; Radanovic, L., Ed.; Pergamon: Oxford, UK, 1966; pp. 46–66. [Google Scholar] [CrossRef]
- Pogromsky, A.; Matveev, A. A non-quadratic criterion for stability of forced oscillation. Syst. Control Lett. 2013, 62, 408–412. [Google Scholar] [CrossRef]
- Dudkowski, D.; Jafari, S.; Kapitaniak, T.; Kuznetsov, N.V.; Leonov, G.A.; Prasad, A. Hidden attractors in dynamical systems. Phys. Rep. 2016, 637, 1–50. [Google Scholar] [CrossRef]
- Kuznetsov, N. Theory of hidden oscillations and stability of control systems. J. Comput. Syst. Sci. Int. 2020, 59, 647–668. [Google Scholar] [CrossRef]
- Hespanha, J.P.; Naghshtabrizi, P.; Xu, Y. A Survey of Recent Results in Networked Control Systems. Proc. IEEE 2007, 95, 138–162. [Google Scholar] [CrossRef] [Green Version]
- Xia, Y.Q.; Gao, Y.L.; Yan, L.P.; Fu, M.Y. Recent progress in networked control systems—A survey. Intern. J. Autom. Comput. 2015, 12, 343–367. [Google Scholar] [CrossRef]
- Nair, G.; Evans, R. State estimation via a capacity-limited communication channel. In Proceedings of the 36th IEEE Conference on Decision and Control (CDC’97), San Diego, CA, USA, 10–12 December 1997; pp. 866–871. [Google Scholar]
- Andrievsky, B.; Fradkov, A.L. Control and observation via communication channels with limited bandwidth. Gyroscopy Navig. 2010, 1, 126–133. [Google Scholar] [CrossRef]
- De Persis, C. n-Bit stabilization of n-dimensional nonlinear systems in feedforward form. IEEE Trans. Automat. Control 2005, 50, 299–311. [Google Scholar] [CrossRef]
- Liberzon, D.; Hespanha, J. Stabilization of nonlinear systems with limited information feedback. IEEE Trans. Automat. Control 2005, 50, 910–915. [Google Scholar] [CrossRef] [Green Version]
- Matveev, A.; Proskurnikov, A.; Pogromsky, A.; Fridman, E. Comprehending complexity: Data-rate constraints in large-scale networks. IEEE Trans. Automat. Control 2019, 64, 4252–4259. [Google Scholar] [CrossRef]
- Voortman, Q.; Pogromsky, A.; Matveev, A.; Nijmeijer, H. Data-rate constrained observers of nonlinear systems. Entropy 2019, 21, 282. [Google Scholar] [CrossRef] [Green Version]
- Matveev, A.; Pogromsky, A. Observation of nonlinear systems via finite capacity channels, Part II: Restoration entropy and its estimates. Automatica 2019, 103, 189–199. [Google Scholar] [CrossRef]
- Åström, K.J.; Bernhardsson, B.M. Comparison of Riemann and Lebesgue sampling for first order stochastic systems. In Proceedings of the 41st IEEE Conference on Decision & Control (CDC 2002), Las Vegas, NV, USA, 10–13 December 2002; pp. 2011–2016. [Google Scholar]
- Yu, H.; Antsaklis, P.J. Output Synchronization of Networked Passive Systems With Event-Driven Communication. IEEE Trans. Automat. Control 2014, 59, 750–756. [Google Scholar] [CrossRef]
- Margun, A.; Furtat, I.; Zimenko, K.; Kremlev, A. Event-triggered output robust controller. In Proceedings of the 25th Mediterranean Conf. Control Automation (MED 2017), Valletta, Malta, 3–6 July 2017; pp. 625–630. [Google Scholar] [CrossRef]
- Li, K.; Baillieu, J. Robust quantization for digital finite communication bandwidth (DFCB) control. IEEE Trans. Automat. Control 2004, 49, 1573–1584. [Google Scholar] [CrossRef]
- Gabor, G.; Gyorfi, Z. Recursive Source Coding; Springer: New York, NY, USA, 1986. [Google Scholar]
- Tatikonda, S.; Sahai, A.; Mitter, S. Control of LQG Systems Under Communication Constraints. In Proceedings of the 37th IEEE Conference Decision and Control, Tampa, FL, USA, 18 December 1998; IEEE: Tampa, FL, USA, 1998; Volume WP04, pp. 1165–1170. [Google Scholar]
- Brockett, R.; Liberzon, D. Quantized feedback stabilization of linear systems. IEEE Trans. Automat. Control 2000, 45, 1279–1289. [Google Scholar] [CrossRef] [Green Version]
- Liberzon, D. Hybrid feedback stabilization of systems with quantized signals. Automatica 2003, 39, 1543–1554. [Google Scholar] [CrossRef]
- Tatikonda, S.; Mitter, S. Control under communication constraints. IEEE Trans. Automat. Control 2004, 49, 1056–1068. [Google Scholar] [CrossRef] [Green Version]
- Fradkov, A.; Andrievsky, B.; Ananyevskiy, M. State estimation and synchronization of pendula systems over digital communication channels. Eur. Phys. J. Spec. Top. 2014, 223, 773–793. [Google Scholar] [CrossRef]
- Fradkov, A.L.; Andrievsky, B.; Evans, R.J. Adaptive Observer-Based Synchronization of Chaotic Systems with First-Order Coder in Presence of Information Constraints. IEEE Trans. Circuits Syst. I 2008, 55, 1685–1694. [Google Scholar] [CrossRef]
- Fradkov, A.; Andrievsky, B.; Evans, R. Synchronization of passifiable Lurie systems via limited-capacity communication channel. IEEE Trans. Circuits Syst. I 2009, 56, 430–439. [Google Scholar] [CrossRef]
- Moreno-Alvarado, R.; Rivera-Jaramillo, E.; Nakano, M.; Perez-Meana, H. Simultaneous Audio Encryption and Compression Using Compressive Sensing Techniques. Electronics 2020, 9, 863. [Google Scholar] [CrossRef]
- Goodman, D.; Gersho, A. Theory of an adaptive quantizer. IEEE Trans. Commun. 1974, COM-22, 1037–1045. [Google Scholar] [CrossRef]
- Andrievsky, B.; Fradkov, A. Adaptive coding for position estimation in formation flight control. IFAC Proc. Vol. 2010, 1, 72–76. [Google Scholar] [CrossRef]
- Fradkov, A.; Andrievsky, B.; Peaucelle, D. Estimation and control under information constraints for LAAS helicopter benchmark. IEEE Trans. Control Syst. Technol. 2010, 18, 1180–1187. [Google Scholar] [CrossRef]
- Gomez-Estern, F.; Canudas de Wit, C.; Rubio, F. Adaptive delta modulation in networked controlled systems with bounded disturbances. IEEE Trans. Automat. Control 2011, 56, 129–134. [Google Scholar] [CrossRef]
- Hill, G.W. Researches in the Lunar Theory. Am. J. Math. 1878, 1, 5–26. [Google Scholar] [CrossRef]
- Clohessy, W.; Wiltshire, R. Terminal guidance system for satellite rendezvous. J. Aerosp. Sci. 1960, 653–658. [Google Scholar] [CrossRef]
- Sedwick, R.; Miller, D.; Kong, E. Mitigation of Differential Perturbations. J. Astronaut. Sci. 1999, 47, 309–331. [Google Scholar] [CrossRef]
- Schweighart, S.; Sedwick, R. High-Fidelity Linearized J2 Model for Satellite Formation Flight. J. Guid. Control Dyn. 2002, 25, 1073–1080. [Google Scholar] [CrossRef]
- Schlanbusch, R.; Kristiansen, R.; Nicklasson, P. Spacecraft formation reconfiguration with collision avoidance. Automatica 2011, 47, 1443–1449. [Google Scholar] [CrossRef]
- Renga, A.; Grassi, M.; Tancredi, U. Relative navigation in LEO by carrier-phase differential GPS with intersatellite ranging augmentation. Int. J. Aerosp. Eng. 2013, 2013, 627509. [Google Scholar] [CrossRef] [Green Version]
- Fradkov, A.L.; Miroshnik, I.V.; Nikiforov, V.O. Nonlinear and Adaptive Control of Complex Systems; Kluwer: Dordrecht, The Netherlands, 1999. [Google Scholar]
- Andrievsky, B.; Kudryashova, E.; Kuznetsov, N.; Kuznetsova, O. Aircraft wing rock oscillations suppression by simple adaptive control. Aerosp. Sci. Technol. 2020, 105, 1–10. [Google Scholar] [CrossRef]
- Massey, T.; Shtessel, Y. Continuous Traditional and High-Order Sliding Modes for Satellite Formation Control. J. Guid. Control Dyn. 2005, 28, 826–831. [Google Scholar] [CrossRef]
- Wu, S.; Sun, X.; Sun, Z.; Wu, X. Sliding-mode control for staring-mode spacecraft using a disturbance observer. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2010, 224, 215–224. [Google Scholar] [CrossRef]
- Cong, B.L.; Liu, X.D.; Chen, Z. Distributed attitude synchronization of formation flying via consensus-based virtual structure. Acta Astronaut. 2011, 68, 1973–1986. [Google Scholar] [CrossRef]
- La Scala, B.; Evans, R. Minimum necessary data rates for accurate track fusion. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference, Seville, Spain, 12–15 December 2005; IEEE: Seville, Spain, 2005; pp. 6966–6971. [Google Scholar]
- Evans, R.; Krishnamurthy, V.; Nair, G.; Sciacca, L. Networked sensor management and data rate control for tracking maneuvering targets. IEEE Trans. Signal Process. 2005, 53, 1979–1991. [Google Scholar] [CrossRef]
- Tomashevich, S.; Andrievsky, B.; Fradkov, A.L. Formation control of a group of unmanned aerial vehicles with data exchange over a packet erasure channel. In Proceedings of the 1st IEEE Intern. Conf. Industrial Cyber-Physical Systems (ICPS 2018), Saint Petersburg, Russia, 15–18 May 2018; pp. 38–43. [Google Scholar] [CrossRef]
- Andrievsky, B. Numerical evaluation of controlled synchronization for chaotic Chua systems over the limited-band data erasure channel. Cybern. Phys. 2016, 5, 3–51. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrievsky, B.; Fradkov, A.L.; Kudryashova, E.V. Control of Two Satellites Relative Motion over the Packet Erasure Communication Channel with Limited Transmission Rate Based on Adaptive Coder. Electronics 2020, 9, 2032. https://doi.org/10.3390/electronics9122032
Andrievsky B, Fradkov AL, Kudryashova EV. Control of Two Satellites Relative Motion over the Packet Erasure Communication Channel with Limited Transmission Rate Based on Adaptive Coder. Electronics. 2020; 9(12):2032. https://doi.org/10.3390/electronics9122032
Chicago/Turabian StyleAndrievsky, Boris, Alexander L. Fradkov, and Elena V. Kudryashova. 2020. "Control of Two Satellites Relative Motion over the Packet Erasure Communication Channel with Limited Transmission Rate Based on Adaptive Coder" Electronics 9, no. 12: 2032. https://doi.org/10.3390/electronics9122032