
Understanding Forearm Muscle Activity during Everyday Common Grasps: Insights for Rehabilitation, Prosthetic Control, and Human–Machine Interaction


Abstract
:1. Introduction
2. Materials and Methods
2.1. Experiment Description
2.2. Data Analysis
3. Results
4. Discussion
4.1. Muscle Contribution
4.2. Muscle Coordination
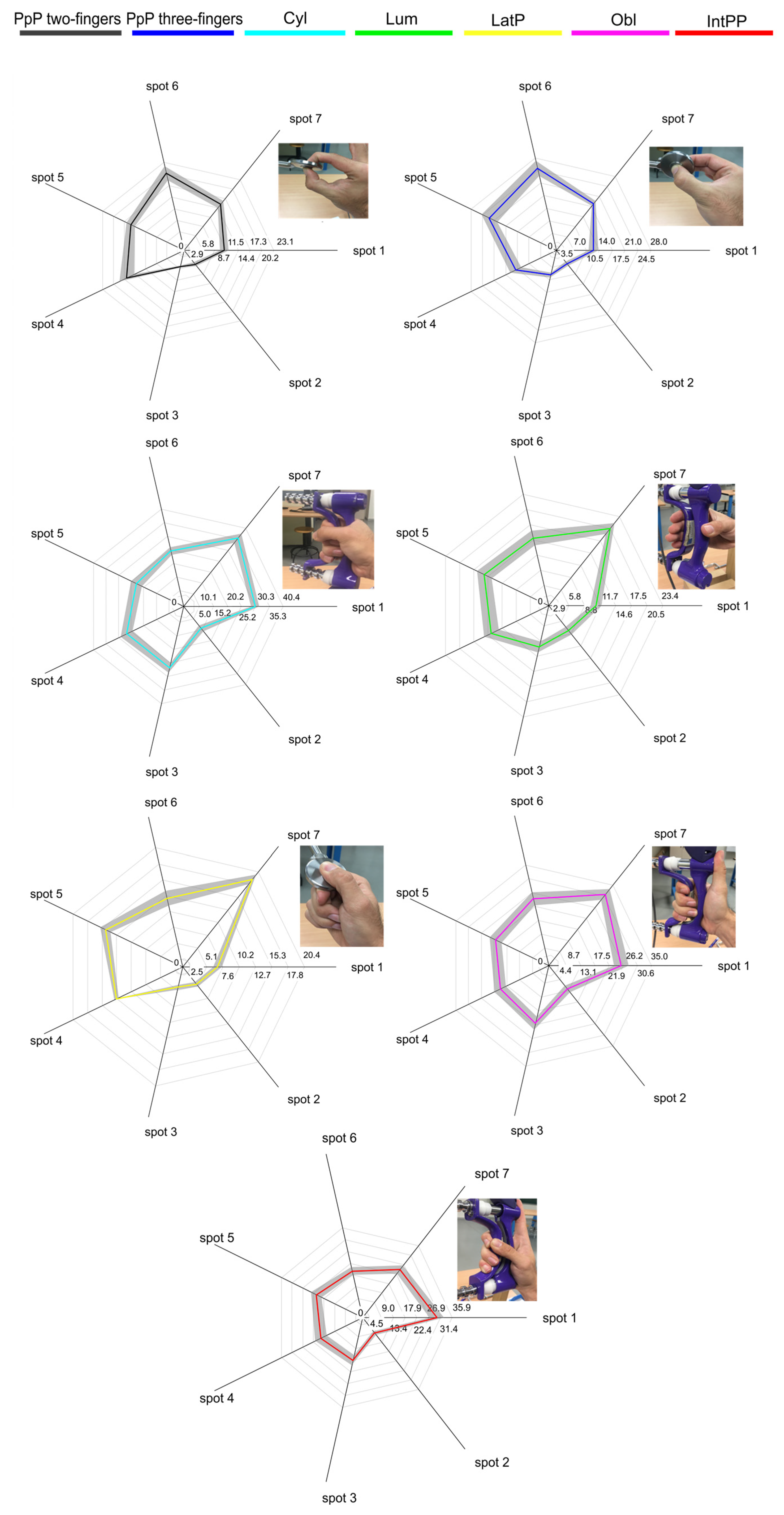
- During power grasps, there was coordination between the wrist flexors and extensors. In particular, wrist flexors and ulnar deviators (spot 1) and wrist extensors and radial deviators (spot 7) worked together as synergistic muscles [32] to keep the wrist in a stable position. Finger flexors (spot 3) demonstrated coordination with the finger extensors (spot 5) and thumb muscles (spot 4).
- Precision grasps involved coordination between the wrist and finger flexors (spots 1, 2, and 3), as well as the wrist extensors, finger extensors, and thumb muscles (spots 4, 5, 6, and 7).
- The FCR (spot 2) primarily worked alone during power grasps with low activity levels. During precision grasps, the FCR collaborated with the finger flexors (spot 3) to contribute to thumb abduction movements.
- Generally, thumb muscles (spot 4) coordinated with finger extensors (spot 5).
- Finger extensors (spot 5) were consistently required with similar activation levels, independently of the grasp performed.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cutkosky, M.R. On grasp choice, grasp models, and the design of hands for manufacturing tasks. IEEE Trans. Robot. Autom. 1989, 5, 269–279. [Google Scholar] [CrossRef]
- Cipriani, C.; Zaccone, F.; Micera, S.; Carrozza, M.C. On the shared control of an EMG-controlled prosthetic hand: Analysis of user-prosthesis interaction. IEEE Trans. Robot. 2008, 24, 170–184. [Google Scholar] [CrossRef]
- Chen, C.; Chai, G.; Guo, W.; Sheng, X.; Farina, D.; Zhu, X. Prediction of finger kinematics from discharge timings of motor units: Implications for intuitive control of myoelectric prostheses. J. Neural Eng. 2019, 16, 026005. [Google Scholar] [CrossRef] [PubMed]
- Smith, L.H.; Kuiken, T.A.; Hargrove, L.J. Real-time simultaneous and proportional myoelectric control using intramuscular EMG. J. Neural Eng. 2014, 11, 066013. [Google Scholar] [CrossRef] [PubMed]
- Young, A.J.; Kuiken, T.A.; Hargrove, L.J. Analysis of using EMG and mechanical sensors to enhance intent recognition in powered lower limb prostheses. J. Neural Eng. 2014, 11, 056021. [Google Scholar] [CrossRef] [PubMed]
- Cole, N.M.; Ajiboye, A.B. Muscle synergies for predicting non-isometric complex hand function for commanding FES neuroprosthetic hand systems. J. Neural Eng. 2019, 16, 056018. [Google Scholar] [CrossRef] [PubMed]
- Kawase, T.; Sakurada, T.; Koike, Y.; Kansaku, K. A hybrid BMI-based exoskeleton for paresis: EMG control for assisting arm movements. J. Neural Eng. 2017, 14, 016015. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Huang, Z.; He, W.; Su, C.Y. Adaptive impedance control for an upper limb robotic exoskeleton using biological signals. IEEE Trans. Ind. Electron. 2017, 64, 1664–1674. [Google Scholar] [CrossRef]
- Geng, Y.; Deng, H.; Samuel, O.W.; Cheung, V.; Xu, L.; Li, G. Modulation of muscle synergies for multiple forearm movements under variant force and arm position constraints. J. Neural Eng. 2020, 17, 026015. [Google Scholar] [CrossRef]
- Liang, P.; Yang, C.; Wang, N.; Li, Z.; Li, R.; Burdet, E. Implementation and test of human-operated and human-like adaptive impedance controls on Baxter robot. In Advances in Autonomous Robotics Systems, Proceedings of the 15th Annual Conference, TAROS 2014, Birmingham, UK, 1–3 September 2014; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2014. [Google Scholar]
- Zhao, X.; Chen, X.; He, Y.; Cao, H.; Chen, T. Varying Speed Rate Controller for Human-Robot Teleoperation Based on Muscle Electrical Signals. IEEE Access 2019, 7, 143563–143572. [Google Scholar] [CrossRef]
- Yang, C.; Chen, J.; Li, Z.; He, W.; Su, C.Y. Development of a physiological signals enhanced teleoperation strategy. In Proceedings of the 2015 IEEE International Conference on Information and Automation, ICIA 2015—In Conjunction with 2015 IEEE International Conference on Automation and Logistics, Lijiang, China, 8–10 August 2015. [Google Scholar]
- Liang, P.; Yang, C.; Li, Z.; Li, R. Writing skills transfer from human to robot using stiffness extracted from sEMG. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, IEEE-CYBER 2015, Shenyang, China, 8–12 June 2015. [Google Scholar]
- Fukuda, O.; Tsuji, T.; Kaneko, M.; Otsuka, A. A human-assisting manipulator teleoperated by EMG signals and arm motions. IEEE Trans. Robot. Autom. 2003, 19, 210–222. [Google Scholar] [CrossRef]
- Ajoudani, A.; Tsagarakis, N.; Bicchi, A. Tele-impedance: Teleoperation with impedance regulation using a body-machine interface. Int. J. Rob. Res. 2012, 31, 1642–1656. [Google Scholar] [CrossRef]
- Kamen, G.; Gabriel, D.A. Essentials of Electromyography; Human Kinetics: Champaign, IL, USA, 2010; ISBN 9780736085502. [Google Scholar]
- Yu, H.-L.; Chase, R.A.; Robert, A.; Strauch, B. Atlas of Hand Anatomy and Clinical Implications; Mosby: St. Louis, MO, USA, 2004; ISBN 0815179278. [Google Scholar]
- Jarque-Bou, N.J.; Vergara, M.; Sancho-Bru, J.L.; Alba, R.-S.; Gracia-Ibáñez, V. Identification of forearm skin zones with similar muscle activation patterns during activities of daily living. J. NeuroEng. Rehabil. 2018, 15, 91. [Google Scholar] [CrossRef] [PubMed]
- Forman, D.A.; Forman, G.N.; Robathan, J.; Holmes, M.W.R. The influence of simultaneous handgrip and wrist force on forearm muscle activity. J. Electromyogr. Kinesiol. 2019, 45, 53–60. [Google Scholar] [CrossRef] [PubMed]
- Mogk, J.P.M.; Keir, P.J. The effects of posture on forearm muscle loading during gripping. Ergonomics 2003, 46, 956–975. [Google Scholar] [CrossRef] [PubMed]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 3. [Google Scholar] [CrossRef] [PubMed]
- Parajuli, N.; Sreenivasan, N.; Bifulco, P.; Cesarelli, M.; Savino, S.; Niola, V.; Esposito, D.; Hamilton, T.J.; Naik, G.R.; Gunawardana, U.; et al. Real-time EMG based pattern recognition control for hand prostheses: A review on existing methods, challenges and future implementation. Sensors 2019, 19, 4596. [Google Scholar] [CrossRef] [PubMed]
- Grushko, S.; Spurný, T.; Černý, M. Control methods for transradial prostheses based on remnant muscle activity and its relationship with proprioceptive feedback. Sensors 2020, 20, 4883. [Google Scholar] [CrossRef]
- Niemeyer, G.; Preusche, C.; Stramigioli, S.; Lee, D. Telerobotics. In Springer Handbook of Robotics; Springer International Publishing: Cham, Switzerland, 2016; pp. 1085–1108. ISBN 9783319325521. [Google Scholar]
- Dugarte, N.; Olvarez, A.; Balacco, J.; Mercado, G.; Gonzalez, A.; Dugarte, E.; Javier, F.; Ceballos, G.; Olivares, A. High efficiency and simple technique for controlling mechanisms by EMG signals. J. Phys. Conf. Ser. 2016, 705, 012065. [Google Scholar] [CrossRef]
- Rovetta, A.; Cosmi, F.; Molinari Tosatti, L.; Termite, L. Evaluation of human control in telerobotics by means of EMG. In Proceedings of the 1994 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Munich, Germany, 12–16 September 1994. [Google Scholar]
- Vergara, M.; Sancho-Bru, J.L.; Gracia-Ibáñez, V.; Pérez-González, A. An introductory study of common grasps used by adults during performance of activities of daily living. J. Hand Ther. 2014, 27, 225–234. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S. Human force exertion in user-product interaction background for design. Int. J. Ind. Ergon. 1995, 15, 473–474. [Google Scholar] [CrossRef]
- Peebles, L.; Norris, B. Filling ‘gaps’ in strength data for design. Appl. Ergon. 2003, 34, 73–88. [Google Scholar] [CrossRef] [PubMed]
- Konrad, P. The ABC of EMG: A Practical Introduction to Kinesiological Electromyography; Noraxon: Scottsdale, AZ, USA, 2005. [Google Scholar]
- Jarque-Bou, N.J.; Vergara, M.; Sancho-Bru, J.L. Does exerting grasps involve a finite set of muscle patterns? A study of intra- and intersubject variability of forearm sEMG signals in seven grasp types. IEEE Trans. Neural Syst. Rehabil. Eng. 2024; in press. [Google Scholar] [CrossRef]
- Oatis, C.A. Kinesiology: The Mechanics and Pathomechanics of Human Movement, 2nd ed.; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2013; ISBN 9781469837574. [Google Scholar]
- Basmajian, J.; De Luca, C. Muscles Alive: Their Functions Revealed by Electromyography; Williams & Wilkins: Baltimore, MD, USA, 1985. [Google Scholar]
- Brand, P.W.; Hollister, A.M. Clinical Mechanics of the Hand, 3rd ed.; Mosby Publishing: St. Louis, MO, USA, 1999. [Google Scholar]
- Kozin, S.H.; Porter, S.; Clark, P.; Thoder, J.J. The contribution of the intrinsic muscles to grip and pinch strength. J. Hand Surg. Am. 1999, 24, 64–72. [Google Scholar] [CrossRef] [PubMed]
- Cooney, W.P.; An, K.-N.; Daube, J.R.; Askew, L.J. Electromyographic analysis of the thumb: A study of isometric forces in pinch and grasp. J. Hand Surg. Am. 1985, 10, 202–210. [Google Scholar] [CrossRef] [PubMed]
- Gracia-Ibáñez, V.; Sancho-Bru, J.L.; Vergara, M. Relevance of grasp types to assess functionality for personal autonomy. J. Hand Ther. 2018, 1, 102–110. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | Spot Muscles |
|---|---|
| 1 | Flexor carpi ulnaris (FCU) |
| 2 | Flexor carpi radialis (FCR), palmaris longus (PL) |
| 3 | Flexor digitorum superficialis (FDS), profundus (FDP), and flexor pollicis longus (FPL) |
| 4 | Abductor pollicis longus (APL), extensor pollicis longus (EPL) and brevis (EPB) |
| 5 | Extensor digitorum communis (EDC) |
| 6 | Extensor carpi ulnaris (ECU) |
| 7 | Brachioradialis (BR), pronator teres (PT), and extensor carpi radialis (ECR) |
| Grasp/Spot | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Two-fingers PpP | 2, 3, 4, 5, 7 | 1, 3 | 1, 2 | 1, 5, 6, 7 | 1, 4, 6, 7 | 4, 5, 7 | 1, 4, 5, 6 |
| Three-fingers PpP | 2, 3, 4, 7 | 3 | 1, 2, 4 | 1, 3, 7 | 6, 7 | 5, 7 | 1, 4, 5, 6 |
| Cyl grasp | 3, 4, 6, 7 | 5 | 1, 4, 5, 6, 7 | 1, 3, 5, 6, 7 | 3, 4, 6 | 1, 3, 4, 5 | 1, 3, 4 |
| Lum grasp | 2, 3, 4, 5, 6 | 1, 3, 4 | 1, 2, 4, 5, 6 | 1, 2, 3, 5, 6, 7 | 1, 3, 4, 6, 7 | 1, 3, 4, 5, 7 | 4, 5, 6 |
| LatP | 1, 2, 4, 6 | 1, 3 | 1, 2 | 1, 5, 6, 7 | 4, 6, 7 | 1, 4, 5, 7 | 4, 5, 6 |
| Obl grasp | 3, 4, 5, 6, 7 | 4, 5 | 1, 4, 5, 6, 7 | 1, 2, 3, 5, 6 | 1, 2, 3, 4, 6, 7 | 1, 3, 4, 5, 7 | 1, 3, 5, 6 |
| IntPP grasp | 4, 5, 6, 7 | - | 4, 5, 6, 7 | 1, 3, 5, 6, 7 | 1, 3, 4, 6, 7 | 1, 3, 4, 5, 7 | 1, 3, 4, 5, 6 |
| Grasp | Two-Fingers PpP | Three-Fingers PpP | Cyl Grasp | Lum Grasp | LatP | Obl Grasp | IntPP Grasp |
|---|---|---|---|---|---|---|---|
| Two-fingers PpP | - | 1, 2, 3, 7 | - | 6 | 1, 2, 3, 7 | 1, 3, 7 | |
| Three-fingers PpP | 1, 2, 3, 4, 7 | 6 | 6 | 1, 3, 7 | 1 | ||
| Cyl grasp | 1, 2, 3, 4, 6, 7 | 1, 2, 3, 4, 6, 7 | 7 | 3 | |||
| Lum grasp | - | 1, 3, 6 | 1 | ||||
| LatP | 1, 2, 3, 6 | 1, 2, 3, 6 | |||||
| Obl grasp | - | ||||||
| IntPP grasp |
| Spot | ||||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | ||
| Two-finger PpP | mA50V | 9.9 | 5.1 | 5.7 | 15.3 | 15.1 | 20.1 | 15.5 |
| 95% CI | 2.1 | 1.1 | 0.5 | 4.0 | 2.1 | 3.5 | 2.1 | |
| Three-finger PpP | mA50V | 10.9 | 6.6 | 9.8 | 14.1 | 20.0 | 26.2 | 18.3 |
| 95% CI | 2.6 | 1.4 | 1.3 | 3.3 | 4.7 | 4.2 | 1.8 | |
| Cyl | mA50V | 30.5 | 14.7 | 25.1 | 25.6 | 21.7 | 24.2 | 32.8 |
| 95% CI | 3.0 | 2.5 | 3.6 | 4.7 | 4.3 | 2.9 | 4.3 | |
| Lum | mA50V | 9.7 | 8.0 | 9.3 | 13.5 | 16.4 | 13.0 | 20.6 |
| 95% CI | 2.0 | 1.8 | 2.1 | 3.0 | 3.1 | 2.8 | 2.6 | |
| LatP | mA50V | 7.2 | 5.3 | 4.4 | 12.6 | 14.3 | 10.7 | 20.1 |
| 95% CI | 1.3 | 0.9 | 0.8 | 0.7 | 1.8 | 2.4 | 2.0 | |
| Obl | mA50V | 24.1 | 13.5 | 23.4 | 19.3 | 19.7 | 22.5 | 30.9 |
| 95% CI | 4.4 | 2.5 | 4.0 | 3.8 | 4.0 | 4.1 | 4.2 | |
| IntPP | mA50V | 29.2 | 9.3 | 18.2 | 17.6 | 19.8 | 19.7 | 24.4 |
| 95% CI | 5.5 | 1.8 | 3.8 | 4.8 | 4.4 | 3.0 | 3.8 | |
| Grasps | Observation about Role of Muscles | Muscles More Activated |
|---|---|---|
| two-finger PpP | Thumb abductors and extensors play a crucial role in stabilizing the grasps by counteracting the forces generated by the index finger. | ECU, EDC, BR, PT, ECR |
| two-finger PpP | The action of the middle finger increases the maximum force generated while reducing the activity of the thumb abductors and extensors. | ECU, EDC, BR, PT, ECR |
| Cyl | The most powerful grasp. It involves FCU and ECR to stabilize the wrist. Finger flexors and thumb extensors and abductors exert similar and maximum activity | BR, PT, ECR, EDC, FCU, FDS, FDP, FPL, APL, EPL, EPB |
| Lum | ECR and ECU are required to extend the wrist. Finger and thumb extensor act to extend the fingers (PIP and DIP joints). | BR, PT, ECR, EDC, ECU |
| LatP | Presents low activity from all the extrinsic muscles. Extensors are more active than flexors in stabilizing the wrist for grasp execution. The thenar and intrinsic muscles are the primary contributors to grasp force (up to 80%) [35]. | BR, PT, ECR, EDC |
| Obl | Behavior similar to Cyl grasp but thumb placement reduces its muscular contribution. | BR, PT, ECR, FCU, ECU, EDC, FDS, FDP, FPL APL, EPL, EPB |
| IntPP | FCU and ECR presents maximum forces to stabilize the wrist. Finger flexors and extensors require similar activity. | FCU, APL, EPL, EPB, BR, PT, ECR, EDC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jarque-Bou, N.J.; Vergara, M.; Sancho-Bru, J.L. Understanding Forearm Muscle Activity during Everyday Common Grasps: Insights for Rehabilitation, Prosthetic Control, and Human–Machine Interaction. Appl. Sci. 2024, 14, 3190. https://doi.org/10.3390/app14083190
Jarque-Bou NJ, Vergara M, Sancho-Bru JL. Understanding Forearm Muscle Activity during Everyday Common Grasps: Insights for Rehabilitation, Prosthetic Control, and Human–Machine Interaction. Applied Sciences. 2024; 14(8):3190. https://doi.org/10.3390/app14083190
Chicago/Turabian StyleJarque-Bou, Néstor J., Margarita Vergara, and Joaquín L. Sancho-Bru. 2024. "Understanding Forearm Muscle Activity during Everyday Common Grasps: Insights for Rehabilitation, Prosthetic Control, and Human–Machine Interaction" Applied Sciences 14, no. 8: 3190. https://doi.org/10.3390/app14083190