
Indoor Genetic Algorithm-Based 5G Network Planning Using a Machine Learning Model for Path Loss Estimation

 ,
,  and
and
Abstract
:1. Introduction
2. Related Work
2.1. Machine Learning for Path Loss Estimation
2.2. Network Planning Algorithms
3. Methods
3.1. Machine Learning Estimation of the PL
3.1.1. WHIPP Indoor Dominant Path Loss Model
3.1.2. Machine Learning PL Estimation
Ensembles Trees: Bagging Algorithm
3.2. Buildings for Wireless Network Optimization
3.3. Input, Outputs, and Dataset Description
- The total number of walls encountered along the direct line between source and receiver.
- Distance to the wall closest to the 5G source along the direct ray.
- Distance to the wall closest to the receiver location along the direct ray.
- Total cumulated wall loss along the direct ray.
- Average of all wall losses in the building.
- Total wall loss along a ray that rotates the direct ray 10 and 20 degrees clockwise, and counterclockwise from the 5G source, with the same distance as the direct ray. This input is added to try to account for the interaction loss in [3] and Equation (1).
3.4. Network Planning and Genetic Algorithm
3.4.1. WHIPP Network Planning Approach
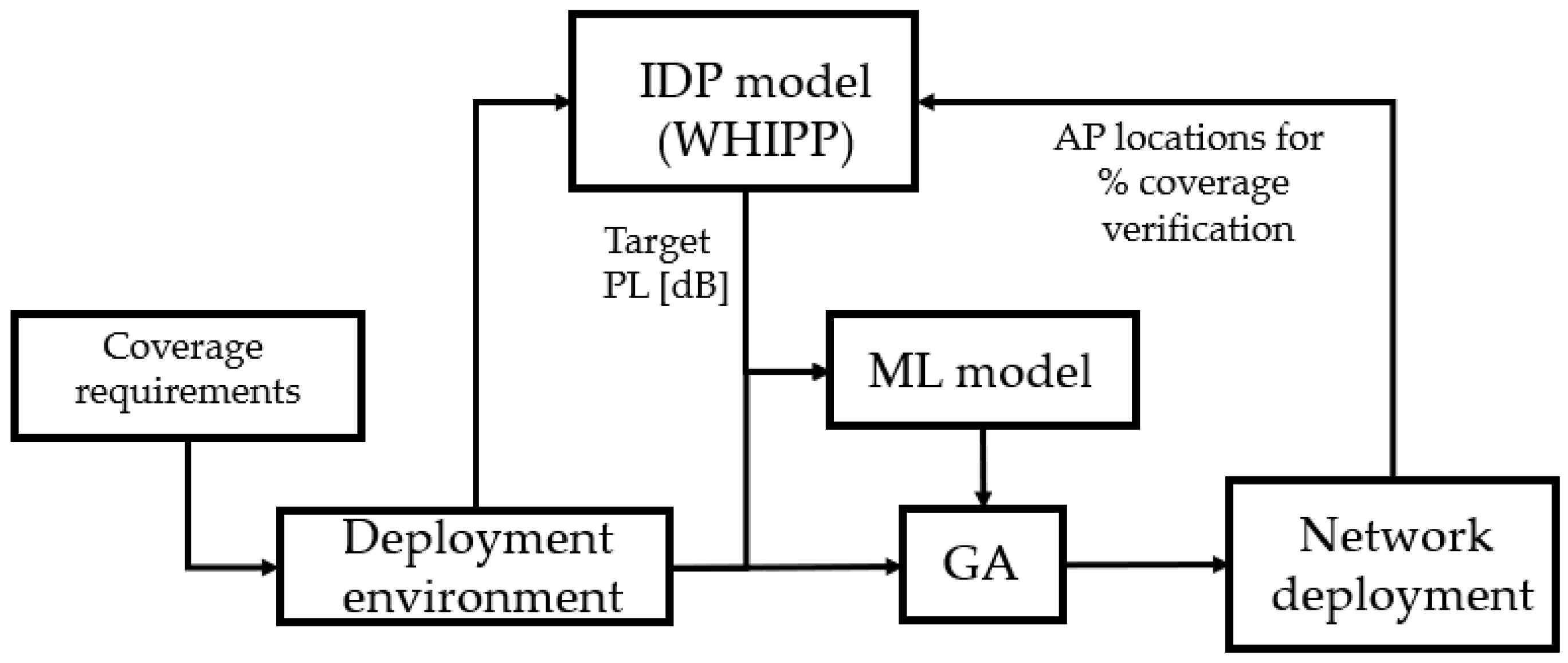
3.4.2. ML + GA Based Network Planning Approach
Genetic Algorithm
- Sorting—sort all previous individuals (solutions) by their score values. The score is based on the characteristics of the solution, where coverage of all grid points is a hard requirement, and where a minimal number of deployed APs is desired, with (optionally) a maximal AVERx value. This leads to the following score formula:
- Crossover—from the sorted population, a new population is created where the best_individuals (five individuals) from the previous population are transferred unchanged to the new population. The other new child solutions (population_size—best_individuals) are obtained from a crossover operation between two individuals, each chosen as the fittest individual out of a set of 5 random individuals from the population of the previous generation. Each child gene is inherited from either one of the corresponding parent genes, with equal probability. The newly created child solution is added to the new population.
- Mutation—all individuals in the obtained new population are mutated. If the mutation has a better score than the original individual, the original individual in the population is replaced by the mutated individual. The mutation operation is as follows:
- ○
- If all receiver locations are not covered (Rx < RxMin), one random inactive AP is switched on
- ○
- If all receiver locations are covered (Rx ≥ RxMin), one random active AP is switched off
4. Results and Discussion
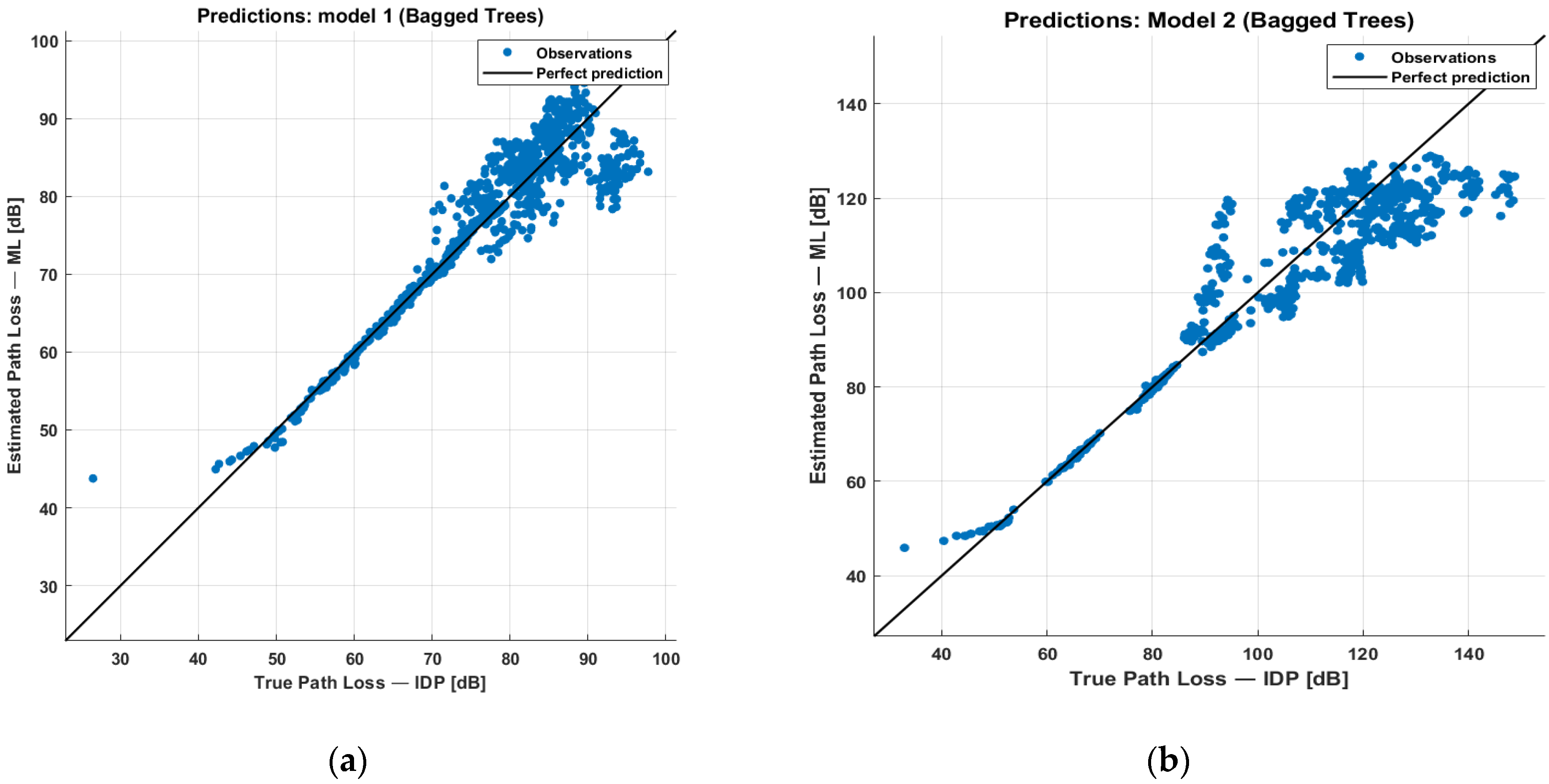
4.1. Machine Learning Model for PL Estimation
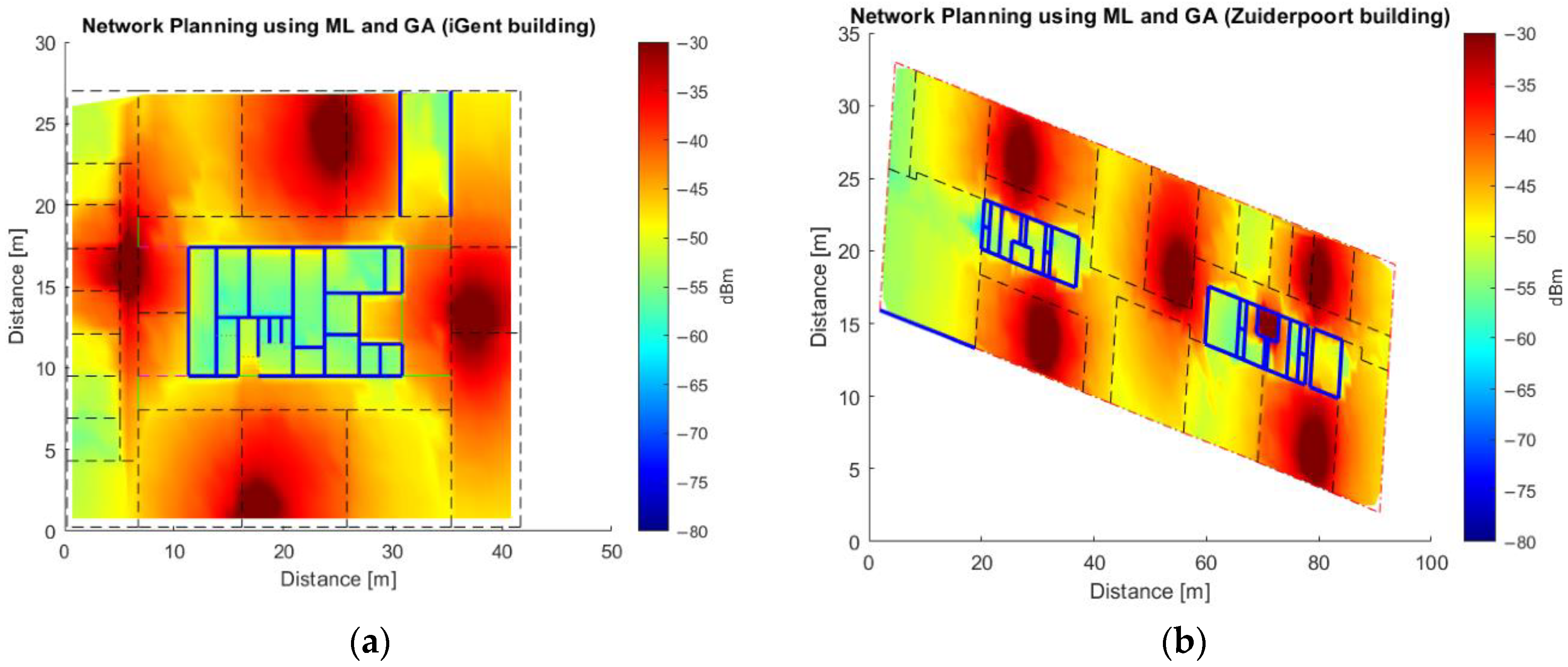
4.2. Network Planning Results and Performance
4.2.1. Wireless Network Planning for 664 Mbps
4.2.2. Wireless Network Planning for 664 Mbps and a Maximal Average Received Power AVERx
4.2.3. Wireless Network Planning for 1000 Mbps and a Maximal Average Received Power AVERx
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| QoS | Quality of Service |
| PL | Path Loss |
| ML | Machine Learning |
| NN | Neural Networks |
| RMSE | Root Mean Squared Error |
| CNN | Convolutional Neural Network |
| BS | Base Station |
| ANN | Artificial NN-based |
| GP | Gaussian process |
| 5G | Fifth Generation network |
| AP | Access Point |
| EIRP | Equivalent Isotopically Radiated Power |
| WHIPP | WICA Heuristic Indoor Propagation Prediction |
| MAE | Mean Absolute Error |
| GA | Genetic Algorithm |
| Rx | Received Signal Level |
| LRM | Linear Regression Model |
| LAMS | Local Area multiple-line Scanning |
| PSO | Particle Swarm Optimization |
| Wi-Fi | Wireless Fidelity |
| WLAN | Wireless Local Area Network |
| BPSO | Binary PSO |
| O2I | Outdoor-to-Indoor |
| I2I | Indoor-to-Indoor |
| eMBB | Extreme Mobile Broadband |
| eMTC | Massive Machine Type Communications |
| URLLC | Ultra-Reliable Low Latency Communication |
| 5G-NR | 5G New Radio |
| FR1 | Frequency Range 1 |
| FR2 | Frequency Range 2 |
Appendix A. Networks Planning




References
- Dangi, R.; Lalwani, P.; Choudhary, G.; You, I.; Pau, G. Study and Investigation on 5G Technology: A Systematic Review. Sensors 2021, 22, 26. [Google Scholar] [CrossRef] [PubMed]
- Ali, U.; Caso, G.; De Nardis, L.; Kousias, K.; Rajiullah, M.; Alay, Ö.; Neri, M.; Brunstrom, A.; Di Benedetto, M.-G. Large-Scale Dataset for the Analysis of Outdoor-to-Indoor Propagation for 5G Mid-Band Operational Networks. Data 2022, 7, 34. [Google Scholar] [CrossRef]
- Adegoke, E.I.; Edwards, R.M.; Whittow, W.G.; Bindel, A. Characterizing the Indoor Industrial Channel at 3.5GHz for 5G. In 2019 Wireless Days (WD); IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Attaran, M. The impact of 5G on the evolution of intelligent automation and industry digitization. J. Ambient Intell. Humaniz. Comput. 2021, 1, 3. [Google Scholar] [CrossRef] [PubMed]
- El Boudani, B.; Kanaris, L.; Kokkinis, A.; Kyriacou, M.; Chrysoulas, C.; Stavrou, S.; Dagiuklas, T. Implementing Deep Learning Techniques in 5G IoT Networks for 3D Indoor Positioning: DELTA (DeEp Learning-Based Co-operaTive Architecture). Sensors 2020, 20, 5495. [Google Scholar] [CrossRef] [PubMed]
- Sheikh, M.U.; Mela, L.; Saba, N.; Ruttik, K.; Jantti, R. Outdoor to Indoor Path Loss Measurement at 1.8GHz, 3.5GHz, 6.5GHz, and 26GHz Commercial Frequency Bands. In Proceedings of the 2021 24th International Symposium on Wireless Personal Multimedia Communications (WPMC), Okayama, Japan, 14–16 December 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Diago-Mosquera, M.E.; Aragón-Zavala, A.; Rodriguez, M. Testing a 5G Communication System: Kriging-Aided O2I Path Loss Modeling Based on 3.5 GHz Measurement Analysis. Sensors 2021, 21, 6716. [Google Scholar] [CrossRef] [PubMed]
- Samad, A.; Diba, F.D.; Kim, Y.-J.; Choi, D.-Y. Results of Large-Scale Propagation Models in Campus Corridor at 3.7 and 28 GHz. Sensors 2021, 21, 7747. [Google Scholar] [CrossRef]
- Ullah, U.; Kamboh, U.R.; Hossain, F.; Danish, M. Outdoor-to-Indoor and Indoor-to-Indoor Propagation Path Loss Modeling Using Smart 3D Ray Tracing Algorithm at 28 GHz mmWave. Arab. J. Sci. Eng. 2020, 45, 10223–10232. [Google Scholar] [CrossRef]
- Teh, C.H.; Chung, B.K.; Lim, E.H. Multilayer Wall Correction Factors for Indoor Ray-Tracing Radio Propagation Modeling. IEEE Trans. Antennas Propag. 2019, 68, 604–608. [Google Scholar] [CrossRef]
- Fathurrahman, S.Z.; Rahardjo, E.T. Coverage of Radio Wave Propagation at UI Campus Surrounding Using Ray Tracing and Physical Optics Near to Far Field Method. In Proceedings of the TENCON 2018—2018 IEEE Region 10 Conference, Jeju, Korea, 28–31 October 2018; pp. 1123–1126. [Google Scholar] [CrossRef]
- Plets, D.; Joseph, W.; Vanhecke, K.; Tanghe, E.; Martens, L. Coverage prediction and optimization algorithms for indoor environments. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 123. [Google Scholar] [CrossRef] [Green Version]
- Zhu, W.; Huang, C.-L.; Yeh, W.-C.; Jiang, Y.; Tan, S.-Y. A Novel Bi-Tuning SSO Algorithm for Optimizing the Budget-Limited Sensing Coverage Problem in Wireless Sensor Networks. Appl. Sci. 2021, 11, 10197. [Google Scholar] [CrossRef]
- Zhang, Y.; Wen, J.; Yang, G.; He, Z.; Wang, J. Path Loss Prediction Based on Machine Learning: Principle, Method, and Data Expansion. Appl. Sci. 2019, 9, 1908. [Google Scholar] [CrossRef] [Green Version]
- Tognola, G.; Plets, D.; Chiaramello, E.; Gallucci, S.; Bonato, M.; Fiocchi, S.; Parazzini, M.; Martens, L.; Joseph, W.; Ravazzani, P. Use of Machine Learning for the Estimation of Down- and Up-Link Field Exposure in Multi-Source Indoor WiFi Scenarios. Bioelectromagnetics 2021, 42, 550–561. [Google Scholar] [CrossRef] [PubMed]
- Trogh, J.; Plets, D.; Martens, L.; Joseph, W. Advanced Real-Time Indoor Tracking Based on the Viterbi Algorithm and Semantic Data. Int. J. Distrib. Sens. Networks 2015, 11, 271818. [Google Scholar] [CrossRef]
- Cheng, H.; Lee, H.; Ma, S. CNN-Based Indoor Path Loss Modeling with Reconstruction of Input Images. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; pp. 605–610. [Google Scholar] [CrossRef]
- Diba, F.D.; Samad, A.; Choi, D.-Y. Centimeter and Millimeter-Wave Propagation Characteristics for Indoor Corridors: Results from Measurements and Models. IEEE Access 2021, 9, 158726–158737. [Google Scholar] [CrossRef]
- Ma, S.; Cheng, H.; Lee, H. A Practical Approach to Indoor Path Loss Modeling Based on Deep Learning. J. Comput. Sci. Eng. 2021, 15, 84–95. [Google Scholar] [CrossRef]
- Zhang, Y.; Wen, J.; Yang, G.; He, Z.; Luo, X. Air-to-Air Path Loss Prediction Based on Machine Learning Methods in Urban Environments. Wirel. Commun. Mob. Comput. 2018, 2018, 8489326. [Google Scholar] [CrossRef]
- Goudos, S.K.; Athanasiadou, G.; Tsoulos, G.V.; Rekkas, V. Modelling Ray Tracing Propagation Data Using Different Machine Learning Algorithms. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020. [Google Scholar] [CrossRef]
- Apavatjrut, A.; Kamdee, S. On Optimizing WiFi RSSI and Channel Assignment using Genetic Algorithm for WiFi Tuning. ECTI Trans. Electr. Eng. Electron. Commun. 2021, 19, 322–330. [Google Scholar] [CrossRef]
- Liu, N.; Plets, D.; Joseph, W.; Martens, L. An algorithm for optimal network planning and frequency channel assignment in indoor WLANs. In Proceedings of the 2014 IEEE Antennas and Propagation Society International Symposium (APSURSI), Memphis, TN, USA, 6–11 July 2014; pp. 1177–1178. [Google Scholar] [CrossRef] [Green Version]
- Qiu, S.; Chu, X.; Leung, Y.-W.; Ng, J.K.Y. Joint Access Point Placement and Power-Channel-Resource-Unit Assignment for 802.11ax-Based Dense WiFi with QoS Requirements. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, oronto, ON, Canada, 6–9 July 2020; pp. 2569–2578. [Google Scholar] [CrossRef]
- Vilovic, I.; Burum, N.; Sipus, Z. Design of an indoor wireless network with neural prediction model. In Proceedings of the Second European Conference on Antennas and Propagation, EuCAP 2007, Edinburgh, UK, 11–16 November 2007. [Google Scholar] [CrossRef]
- Zhang, Z.; Di, X.; Tian, J.; Zhu, Z. A multi-objective WLAN planning method. In Proceedings of the 2017 International Conference on Information Networking (ICOIN), Da Nang, Vietnam, 11–13 January 2017; pp. 86–91. [Google Scholar] [CrossRef]
- Abdallah, W.; Mnasri, S.; Val, T. Distributed Approach for the Indoor Deployment of Wireless Connected Objects by the Hybridization of the Voronoi Diagram and the Genetic Algorithm. arXiv 2022, arXiv:2202.13735. [Google Scholar] [CrossRef]
- Lee, B.-H.; Ham, D.; Choi, J.; Kim, S.-C.; Kim, Y.-H. Genetic Algorithm for Path Loss Model Selection in Signal Strength-Based Indoor Localization. IEEE Sens. J. 2021, 21, 24285–24296. [Google Scholar] [CrossRef]
- Mohammed, R.A.; Salim, O.N.M.; Al-Nakkash, A.H.; AlAbdullah, A.A.S. Proposed APs Distribution Optimization Algorithm: Aware of Interference (APD-AI). IOP Conf. Ser. Mater. Sci. Eng. 2020, 745, 12040. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J.; Cai, M.; Li, D.; Wang, Q. The 5G NOMA networks planning based on the multi-objective evolutionary algorithm. In Proceedings of the 2020 16th International Conference on Computational Intelligence and Security (CIS), Guangxi, China, 27–30 November 2020; pp. 59–62. [Google Scholar] [CrossRef]
- Omae, M.O.; Ndungu, E.N.; Kibet, P.L. Indoor LOS Wi-Fi Signal Coverage Modeling Using PSO Trained LOG10D-ANFIS with Random Input. Int. J. Sci. Eng. Res. 2019, 10, 1151–1158. [Google Scholar]
- Abdallah, W.; Val, T. Genetic-Voronoi algorithm for coverage of IoT data collection networks. 30th International Conference on Computer Theory and Applications (ICCTA 2020), Alexandria, Egypt, 12–14 December 2020. [Google Scholar] [CrossRef]
- Wölfle, G.; Wahl, R.; Wertz, P.; Wildbolz, P.; Landstorfer, F. Dominant Path Prediction Model for Indoor Scenarios. In German Microwave Conference (GeMIC); University of Ulm: Ulm, Germany, 2005; Volume 27. [Google Scholar]
- Wolfle, G.; Landstorfer, F.M.; Gahleitner, R.; Bonek, E. Extensions to the field strength prediction technique based on dominant paths between transmitter and receiver in indoor wireless communications. In Proceedings of the 2nd European Personal and Mobile Communications Conference (EPMCC), Bonn, Germany, 30 September–2 October 1997. [Google Scholar]
- Keenan, J.M.; Motley, A.J. Radio coverage in buildings. Br. Telecom Technol. 1990, 8, 19–24. [Google Scholar]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Lomte, S.S.; Torambekar, S.G. Decision Tree for Uncertain Numerical Data Using Bagging and Boosting; Nagar, A.K., Jat, D.S., Marín-Raventós, G., Mishra, D.K., Eds.; Springer Singapore: Singapore, 2022; pp. 509–523. [Google Scholar]
- Yadav, S.; Shukla, S. Analysis of k-fold cross-validation over hold-out validation on colossal datasets for quality classification. In Proceedings of the 2016 IEEE 6th International Conference on Advanced Computing (IACC), Bhimavaram, India, 27–28 February 2016; pp. 78–83. [Google Scholar]
- Efron, B. Bootstrap Methods: Another Look at the Jackknife. Ann. Stat. 1979, 7, 1–26. [Google Scholar] [CrossRef]
- Ensemble Methods: Bagging, Boosting and Stacking|By Joseph Rocca|Towards Data Science. Available online: https://towardsdatascience.com/ensemble-methods-bagging-boosting-and-stacking-c9214a10a205 (accessed on 1 April 2022).
- Koutitas, G.; Samaras, T. Exposure Minimization in Indoor Wireless Networks. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 199–202. [Google Scholar] [CrossRef]
- Mahmood, T.; Al-Qaysi, H.K.; Hameed, A.S. The Effect of Antenna Height on the Performance of the Okumura/Hata Model under Different Environments Propagation. In Proceedings of the 2021 International Conference on Intelligent Technologies (CONIT), Hubli, India, 25–27 June 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Akhpashev, R.V.; Andreev, A.V. COST 231 Hata adaptation model for urban conditions in LTE networks. In Proceedings of the 2016 17th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices (EDM), Erlagol, Russia, 30 June–4 July 2016; pp. 64–66. [Google Scholar] [CrossRef]
- Chu, E.; Yoon, J.; Jung, B.C. A Novel Link-to-System Mapping Technique Based on Machine Learning for 5G/IoT Wireless Networks. Sensors 2019, 19, 1196. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Building | Area [m2] | Diffraction Loss Factor | #5G Sources | Total Number of PL Samples | Dataset Type |
|---|---|---|---|---|---|
| iGent | 42 × 27 | 1/18 | 17 | 18,904 | Test |
| Zuiderpoort | 82 × 17 | 13 | 20,348 | Training/ validation | |
| Vooruit | 30 × 37 | 1/5.14 | 14 | 10,766 | Test |
| Koutitas | 40 × 29 | 13 | 11,856 | Test | |
| Library Jaume I | 110 × 30 | 23 | 72,266 | Training/ validation |
| Frequency | 3500 MHz | ||||
|---|---|---|---|---|---|
| Bandwidth | 80 MHz | ||||
| EIRP | 20 dBm | ||||
| Shadowing margin | 7 dB | ||||
| Fading Margin | 5 dB | ||||
| Thermal noise power at 300 K (@80 MHz bandwidth) | −95 dBm | ||||
| CQI/Modulation/SNR/Bitrate/Rx [44] | CQI | Modulation | SNR [dB] | Bitrate [Mbps] | Rx [dBm] |
| 2 | QPSK | −3 | 70 | −86 | |
| 3 | QPSK | 0 | 96 | −83 | |
| 4 | 16QAM | 3 | 100 | −80 | |
| 5 | 16QAM | 5 | 188 | −78 | |
| 12 | 256QAM | 27 | 664 | −56 | |
| 13 | 256QAM | 29 | 774 | −54 | |
| 15 | 256QAM | 30 | 1000 | −53 | |
| Scenario | Possible APs | WHIPP Tool | ML + GA | |||||
|---|---|---|---|---|---|---|---|---|
| Required APs | Optimization Time [min] | Required APs | Pre-Processing Time [min] | GA Optimization Time [min] | % Rx Covered | AVERx Gain [dB] | ||
| iGent | 52 | 4 | 7.15 | 4 | 83 | 0.11 | 99.37 | 3.80 |
| Zuiderpoort | 58 | 6 | 42.80 | 6 | 95 | 0.20 | 100.00 | 4.20 |
| Vooruit | 50 | 3 | 2.00 | 3 | 78 | 0.16 | 100.00 | 4.50 |
| Koutitas | 45 | 13 | 10.00 | 10 | 38 | 0.16 | 99.56 | 2.00 |
| Library Jaume I | 187 | 26 | 1358.00 | 26 | 480 | 1.56 | 100.00 | 3.00 |
| Scenario | Possible APs | WHIPP Tool | ML + GA | |||
|---|---|---|---|---|---|---|
| Required APs | Time [min] | Required APs | GA Calculation Time [min] | % Rx Covered | ||
| iGent | 52 | 7 | 1.82 | 7 | 0.14 | 100 |
| Zuiderpoort | 58 | 9 | 27.22 | 9 | 0.22 | 100 |
| Vooruit | 50 | 4 | 1.05 | 4 | 0.08 | 100 |
| Koutitas | 45 | 16 | 18.13 | 12 | 0.13 | 100 |
| Library Jaume I | 187 | 35 | 1709.00 | 31 | 2.58 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hervis Santana, Y.; Martinez Alonso, R.; Guillen Nieto, G.; Martens, L.; Joseph, W.; Plets, D. Indoor Genetic Algorithm-Based 5G Network Planning Using a Machine Learning Model for Path Loss Estimation. Appl. Sci. 2022, 12, 3923. https://doi.org/10.3390/app12083923
Hervis Santana Y, Martinez Alonso R, Guillen Nieto G, Martens L, Joseph W, Plets D. Indoor Genetic Algorithm-Based 5G Network Planning Using a Machine Learning Model for Path Loss Estimation. Applied Sciences. 2022; 12(8):3923. https://doi.org/10.3390/app12083923
Chicago/Turabian StyleHervis Santana, Yosvany, Rodney Martinez Alonso, Glauco Guillen Nieto, Luc Martens, Wout Joseph, and David Plets. 2022. "Indoor Genetic Algorithm-Based 5G Network Planning Using a Machine Learning Model for Path Loss Estimation" Applied Sciences 12, no. 8: 3923. https://doi.org/10.3390/app12083923