
Regulating Grip Forces through EMG-Controlled Protheses for Transradial Amputees

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. EMG Database
2.2. EMG Features
- Classic Features: We extracted the following classic state-of-the-art features from the filtered data: Mean Absolute Value (MAV), Root Mean Square (RMS), Zero Crossing Rate(ZC),Slope Sign Changes (SSC) and Waveform Length (WL). We refer the user to [15] for a more extended description of these well known features.
- Time-dependent power spectrum descriptors: TD-PSD features are time domain power spectral descriptors proposed by Khushaba et al. [9] and Al-Timemy et al. [10] which include: Moments of the waveform and its first and second derivatives , and , Power Distribution (S), Irregularity Factor (irr), Waveform Length Ratio (WLR). A single feature vector was constructed composed of the log of each of the aforementioned features.
2.3. Windowing and Look-Back Filtering
- Present (P): Feature vector extracted from only the current EMG window n:For the classic features we have andWhile for the TD-PSD features we have and
- Log version of Present (PL): Logarithmically scaled version of the previous vector, i.e., :
- Present-Past (PPa): Feature vector from the current window combined with that of the previous window. Values of the feature vector of the previous window are concatenated with the current one as follows:
- Log version of Past and Present (PPaL): Logarithmically scaled version of the previous vector:
2.3.1. Classifiers
- Linear Models (4): Logistic Regression (LR), Linear Discriminant Analysis (LDA), Stochastic Gradient Descent(SGD) classifier and Passive Aggressive (PA) classifier.
- Nonlinear Algorithms (5): Decision Trees (DT), Support Vector Machine(with linear kernel) (SVMLinear), Support Vector Machine(with polynomial kernel)(SVMPoly), Support Vector Machine(with rbf kernel)(SVMRbf), Naive Bayes (NB) classifier.
- Ensemble Algorithms (4): Ada Boost Classifier (AB), Bagged Decision Trees (BDT), Random Forest (RF) and Extra Trees (ET) classifier.
2.3.2. Evaluation Methodology
3. Results
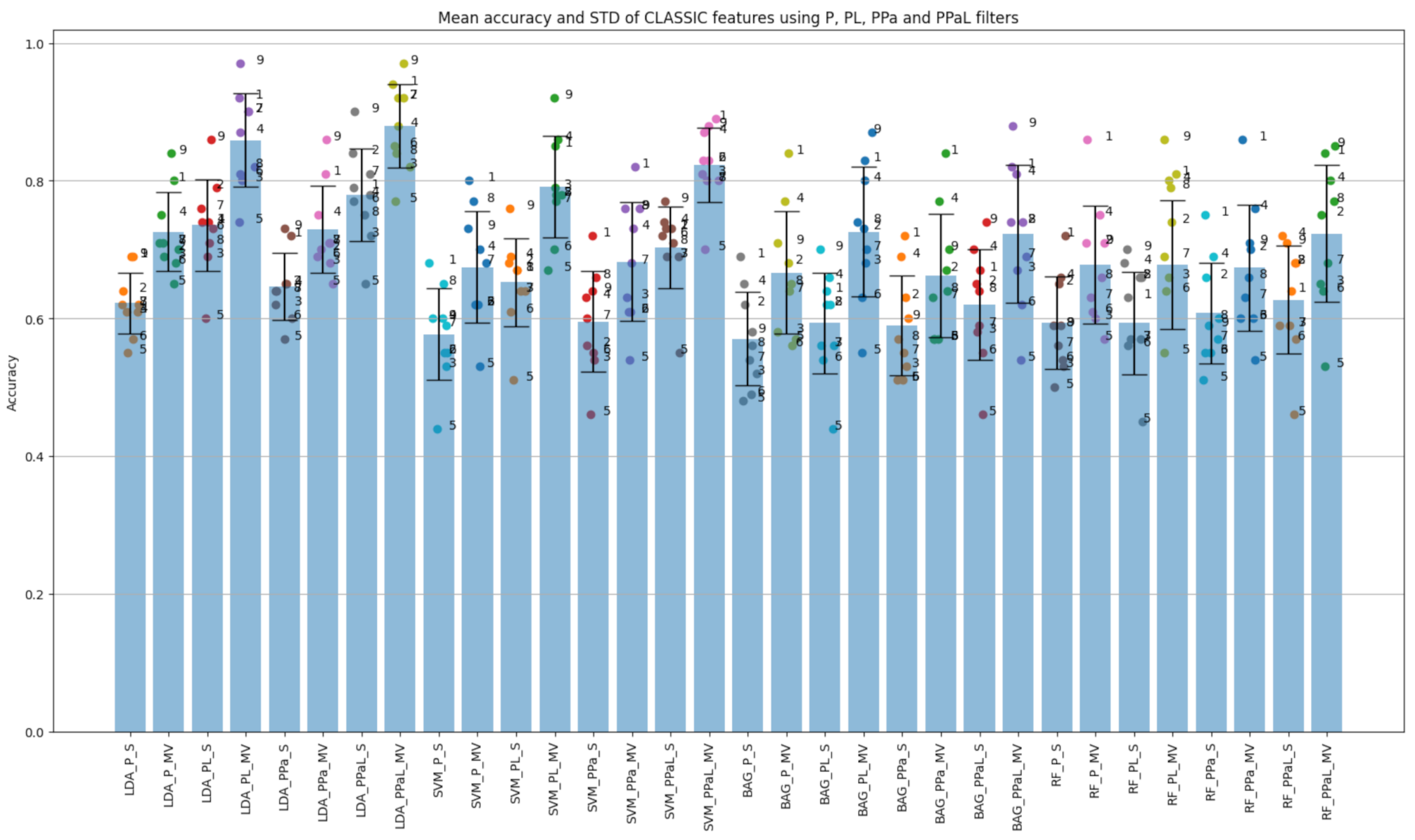
3.1. Classic Features
- Linear models: One can observe in Table 1 the number of blank cells presented in the block of linear models of the table. It is remarkable that the Stochastic Gradient Descent and Passive Aggressive do not achieve more than 50% accuracy for any of the feature combinations as applied to this dataset. The Logistic Regression algorithm achieves greater than 50% accuracy only after majority voting has been applied. Linear Discriminant Analysis appears to provide the best results out of all classifiers: 78% accuracy for single window analysis; 88% with majority voting.
- Non-linear models: Neither Decision Trees, polynomic or RBF versions of Support Vector Machines, nor the Naive Bayes classifier achieve 80% accuracy for the 18 classes. Only the linear version of support vector machine reaches 82% accuracy after majority voting with the PPaL feature combination. Accuracy is lower than with LDA in all conditions.
- Ensemble models: The Ada Boost classifier does not provide results better than 50% in any of its configuration. Although the other three proposed classifiers (Bagged Decision Trees, Random Forest, Extra Trees) provide better results, none surpassed 73% even with majority voting.
Individual User Performance
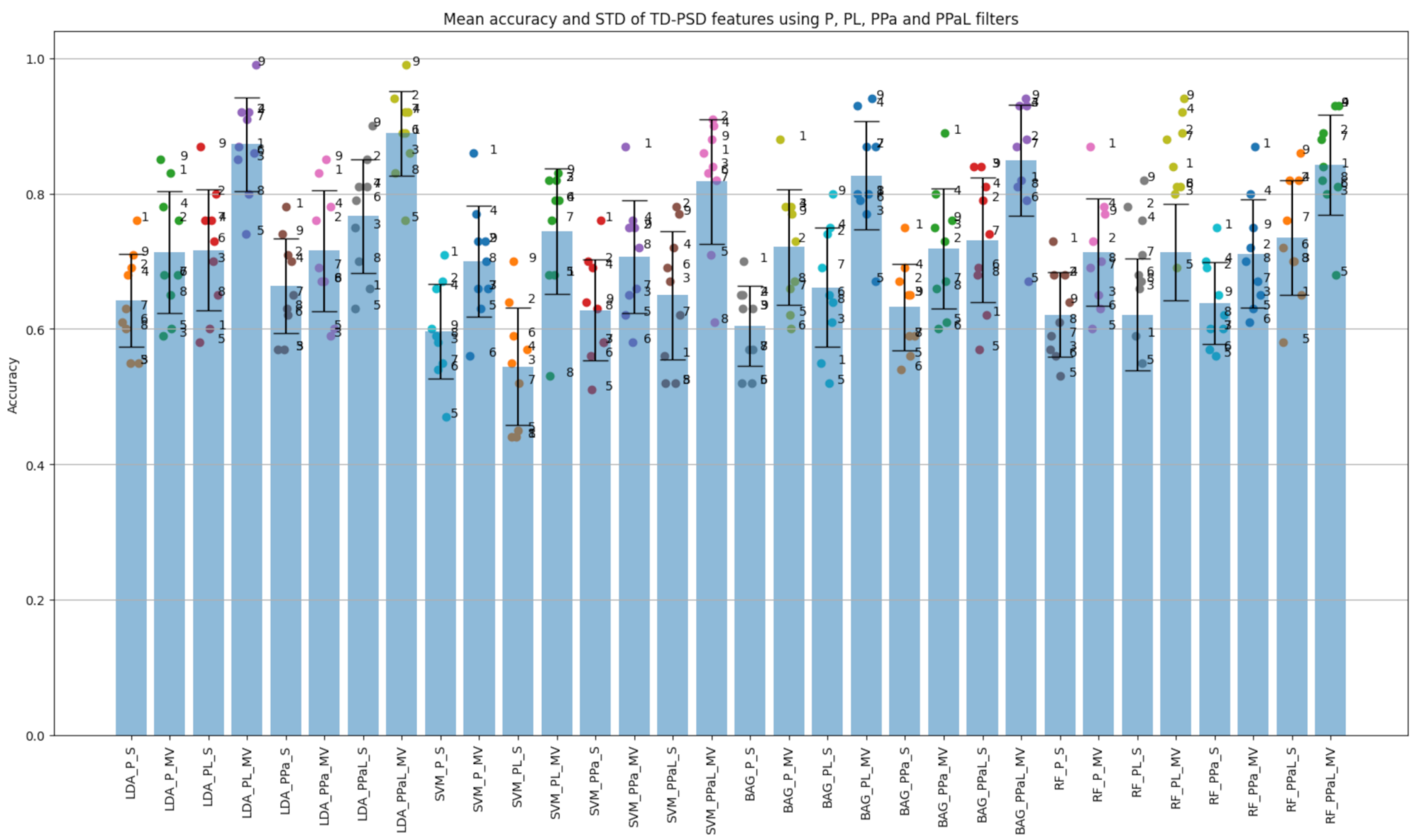
3.2. TD-PSD Features
- Linear models: LDA classifier is once again the algorithm that outperforms the rest of the models of this block. With the TD-PSD features, we can observe easily that the PL and PPaL feature combinations demonstrate the highest accuracy (87% and 89%) after majority voting, 72% and 77% respectively for individual windows.
- Non-Linear models: The tendency is similar in the non-linear models when using TD-PSD features compared with classic features. Although in this case we obtain higher general accuracies, only with the SVM with linear kernels is near the auto-imposed 85% percent threshold.
- Ensemble models: As in the case of classic features, Bagging Classifiers, Extra trees and Random Forest are the ones providing higher accuracy results. Ada Boost again failed to classify correctly more than half of the instances.
Individual User Performance
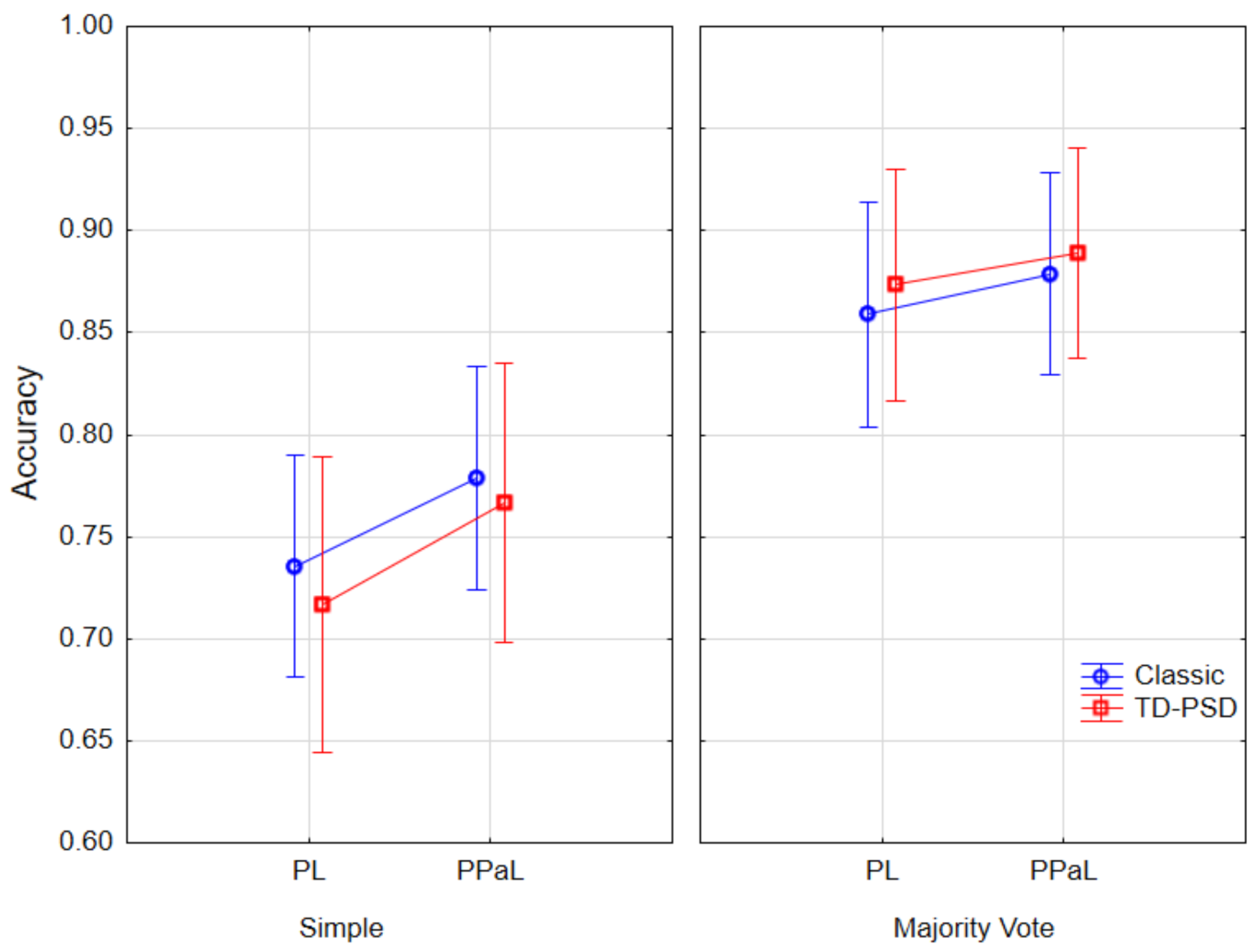
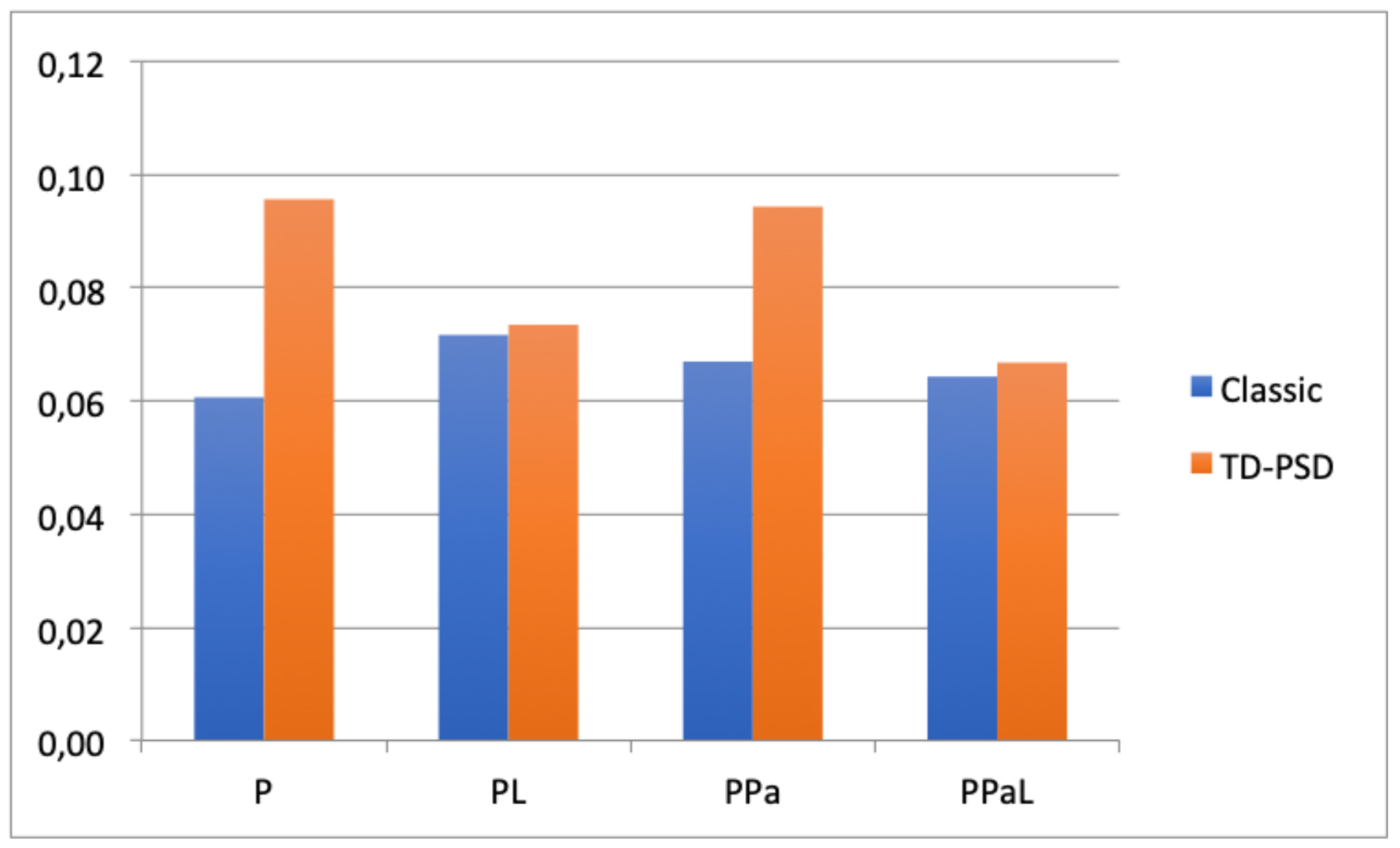
3.3. Statistical Comparison
4. Discussion
4.1. Comparison with Related Studies
4.2. Result Transfer to Real World
- muscles act under the effects of the gravity due to the weight of the prosthetic device and that interference should be quantified,
- the final user should place the prosthetic on his/her arm without specialized help and this could lead to problems in the EMG readings that do not occur in controlled laboratory conditions,
- the final trained model and the extracted features per window should be light enough to be loaded and extracted on real time in a micro-controllers embedded in a prosthetic hand, and
- the choice of N should be done according to desired latency the capabilities of the EMG capturing system.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Robotic Prosthetic Market Size Description. Available online: https://www.grandviewresearch.com/industry-analysis/robotic-prosthetics-market (accessed on 20 September 2020).
- Upper Limb Prosthetics Market Size 2023. Available online: https://www.researchandmarkets.com/reports/4618262/prosthetic-arm-market-forecasts-from-2018-to (accessed on 21 October 2021).
- Englehart, K.; Hudgins, B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef] [PubMed]
- Pancholi, S.; Joshi, A.M. Portable EMG data acquisition module for upper limb prosthesis application. IEEE Sensors J. 2018, 18, 3436–3443. [Google Scholar] [CrossRef]
- Cordella, F.; Ciancio, A.L.; Sacchetti, R.; Davalli, A.; Cutti, A.G.; Guglielmelli, E.; Zollo, L. Literature review on needs of upper limb prosthesis users. Front. Neurosci. 2016, 10, 209. [Google Scholar] [CrossRef] [PubMed]
- Jabbari, M.; Khushaba, R.N.; Nazarpour, K. EMG-Based Hand Gesture Classification with Long Short-Term Memory Deep Recurrent Neural Networks. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; IEEE: New York, NY, USA, 2020; pp. 3302–3305. [Google Scholar]
- Zecca, M.; Micera, S.; Carrozza, M.C.; Dario, P. Control of multifunctional prosthetic hands by processing the electromyographic signal. Crit. Rev. Biomed. Eng. 2002, 30, 459–485. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Campbell, E.; Phinyomark, A.; Al-Timemy, A.H.; Khushaba, R.N.; Petri, G.; Scheme, E. Differences in EMG feature space between able-bodied and amputee subjects for myoelectric control. In Proceedings of the 2019 9th International IEEE/EMBS Conference on Neural Engineering (NER), San Francisco, CA, USA, 20–23 March 2019; IEEE: New York, NY, USA, 2019; pp. 33–36. [Google Scholar]
- Khushaba, R.N.; Al-Ani, A.; Al-Timemy, A.; Al-Jumaily, A. A fusion of time-domain descriptors for improved myoelectric hand control. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Al-Timemy, A.H.; Khushaba, R.N.; Bugmann, G.; Escudero, J. Improving the Performance Against Force Variation of EMG Controlled Multifunctional Upper-Limb Prostheses for Transradial Amputees. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 650–661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, L.C.; Hsu, S.Y.; Lin, E. A comparison of classification methods for predicting Chronic Fatigue Syndrome based on genetic data. J. Transl. Med. 2009, 7, 81. [Google Scholar] [CrossRef] [Green Version]
- Szczuko, P.; Lech, M.; Czyżewski, A. Comparison of classification methods for EEG signals of real and imaginary motion. In Advances in Feature Selection for Data and Pattern Recognition; Springer: Cham, Switzerland, 2018; pp. 227–239. [Google Scholar]
- Bourouhou, A.; Jilbab, A.; Nacir, C.; Hammouch, A. Comparison of classification methods to detect the Parkinson disease. In Proceedings of the 2016 International Conference on Electrical and Information Technologies (ICEIT), Tangiers, Morocco, 4–7 May 2016; IEEE: New York, NY, USA, 2016; pp. 421–424. [Google Scholar]
- Mostafa, S.A.; Mustapha, A.; Mohammed, M.A.; Hamed, R.I.; Arunkumar, N.; Abd Ghani, M.K.; Jaber, M.M.; Khaleefah, S.H. Examining multiple feature evaluation and classification methods for improving the diagnosis of Parkinson’s disease. Cogn. Syst. Res. 2019, 54, 90–99. [Google Scholar] [CrossRef]
- Phinyomark, A.; Limsakul, C.; Phukpattaranont, P. A novel feature extraction for robust EMG pattern recognition. arXiv 2009, arXiv:0912.3973. [Google Scholar]
- Witten, I.H.; Frank, E. Data mining: Practical machine learning tools and techniques with Java implementations. Acm Sigmod Rec. 2002, 31, 76–77. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P | PL | PPa | PPaL | |||||
|---|---|---|---|---|---|---|---|---|
| S | MV | S | MV | S | MV | S | MV | |
| Linear Models | ||||||||
| Logistic Regression | 0.58 | 0.59 | 0.61 | |||||
| Linear Discriminant Analysis | 0.62 | 0.73 | 0.74 | 0.86 | 0.65 | 0.73 | 0.78 | 0.88 |
| Stochastic Gradient Descent | ||||||||
| Passive Aggressive | ||||||||
| Non-Linear Models | ||||||||
| Decision Tree | 0.63 | 0.68 | 0.63 | 0.68 | ||||
| Support Vector Machine(’linear’) | 0.58 | 0.67 | 0.65 | 0.79 | 0.60 | 0.68 | 0.70 | 0.82 |
| Support Vector Machine(’poly’) | 0.62 | 0.50 | 0.65 | |||||
| Support Vector Machine(’rbf’) | 0.62 | 0.61 | ||||||
| Gaussian Naive Bayes | 0.57 | 0.53 | 0.62 | 0.52 | 0.57 | 0.56 | 0.65 | |
| Ensemble Models | ||||||||
| Ada Boost | ||||||||
| Bagged Decision Tree | 0.58 | 0.67 | 0.59 | 0.73 | 0.59 | 0.66 | 0.62 | 0.72 |
| Random Forest | 0.59 | 0.68 | 0.61 | 0.73 | 0.61 | 0.67 | 0.63 | 0.72 |
| Extra Trees | 0.60 | 0.67 | 0.61 | 0.73 | 0.61 | 0.67 | 0.64 | 0.72 |
| P | PL | PPa | PPaL | |||||
|---|---|---|---|---|---|---|---|---|
| S | MV | S | MV | S | MV | S | MV | |
| Linear Models | ||||||||
| Logistic Regression | 0.54 | 0.64 | 0.55 | 0.79 | 0.57 | 0.65 | 0.62 | 0.82 |
| Linear Discriminant Analysis | 0.64 | 0.71 | 0.72 | 0.87 | 0.66 | 0.72 | 0.77 | 0.89 |
| Stochastic Gradient Descent | 0.52 | |||||||
| Passive Aggressive | ||||||||
| Non-Linear Models | ||||||||
| Decision Tree | 0.50 | 0.67 | 0.54 | 0.79 | 0.50 | 0.66 | 0.56 | 0.79 |
| Support Vector Machine(’linear’) | 0.60 | 0.70 | 0.54 | 0.74 | 0.63 | 0.71 | 0.65 | 0.82 |
| Support Vector Machine(’poly’) | 0.58 | 0.67 | 0.49 | 0.65 | 0.60 | 0.66 | 0.53 | 0.64 |
| Support Vector Machine(’rbf’) | ||||||||
| Gaussian Naive Bayes | 0.53 | 0.62 | 0.61 | 0.79 | 0.54 | 0.61 | 0.66 | 0.79 |
| Ensemble Models | ||||||||
| Ada Boost | ||||||||
| Bagged Decision Tree | 0.60 | 0.72 | 0.66 | 0.83 | 0.63 | 0.72 | 0.73 | 0.85 |
| Random Forest | 0.62 | 0.71 | 0.69 | 0.84 | 0.64 | 0.71 | 0.73 | 0.84 |
| Extra Trees | 0.62 | 0.71 | 0.69 | 0.85 | 0.64 | 0.71 | 0.74 | 0.84 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rasines, I.; Prada, M.; Bobrov, V.; Agrawal, D.; Martinez, L.; Iriondo, P.; Remazeilles, A.; McIntyre, J. Regulating Grip Forces through EMG-Controlled Protheses for Transradial Amputees. Appl. Sci. 2021, 11, 11199. https://doi.org/10.3390/app112311199
Rasines I, Prada M, Bobrov V, Agrawal D, Martinez L, Iriondo P, Remazeilles A, McIntyre J. Regulating Grip Forces through EMG-Controlled Protheses for Transradial Amputees. Applied Sciences. 2021; 11(23):11199. https://doi.org/10.3390/app112311199
Chicago/Turabian StyleRasines, Irati, Miguel Prada, Viacheslav Bobrov, Dhruv Agrawal, Leire Martinez, Pedro Iriondo, Anthony Remazeilles, and Joseph McIntyre. 2021. "Regulating Grip Forces through EMG-Controlled Protheses for Transradial Amputees" Applied Sciences 11, no. 23: 11199. https://doi.org/10.3390/app112311199