
Acoustic Emission Signal Due to Fiber Break and Fiber Matrix Debonding in Model Composite: A Computational Study


Abstract
:1. Introduction
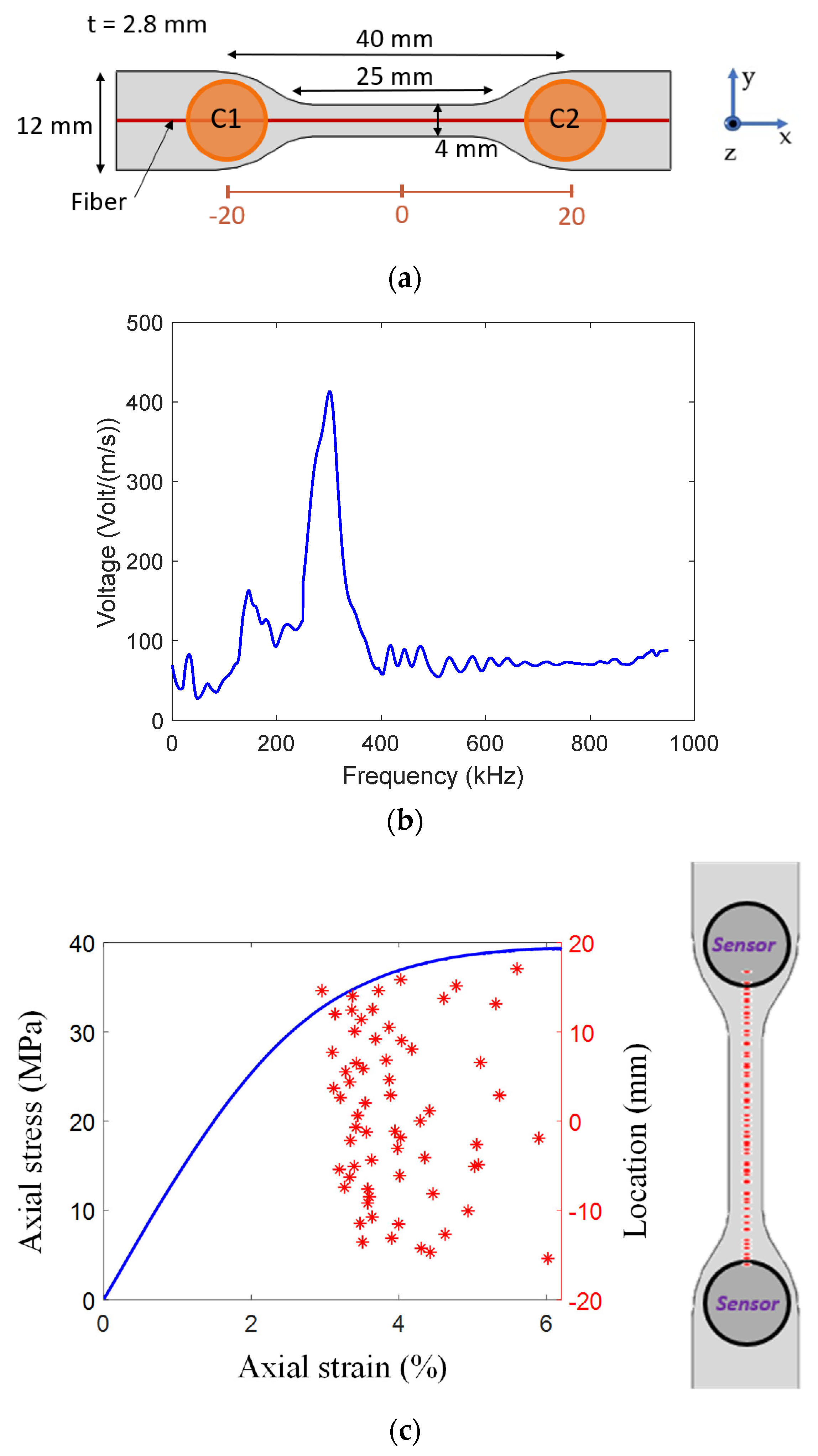
2. Experimental Procedure
3. Numerical Simulation of AE Signals
3.1. Fiber Break and Surrounding Medium
3.2. Simulation of Debonding
3.3. Sensor Simulation
3.3.1. Perfect Virtual Point-Contact Sensor
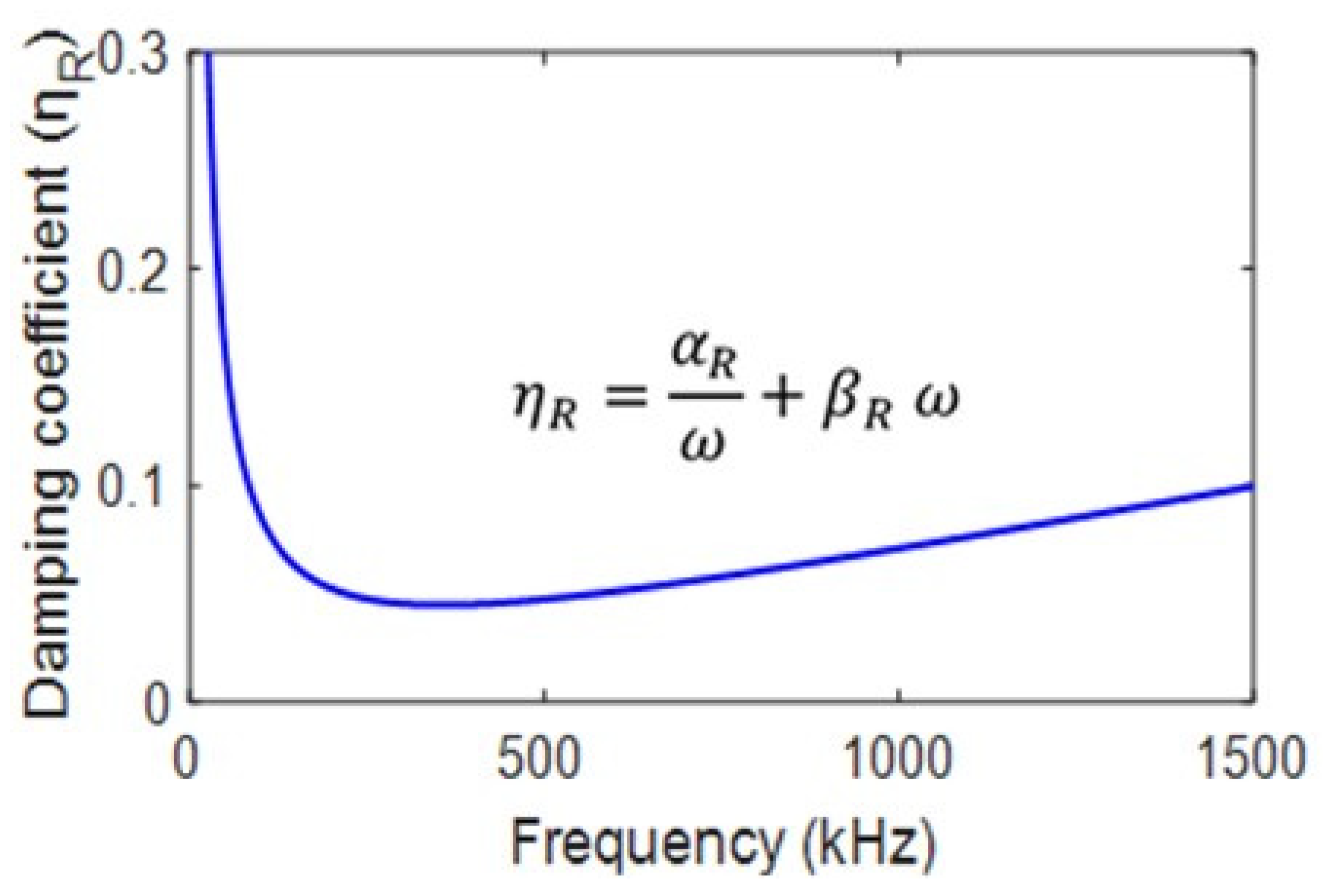
3.3.2. Resonant Sensor
4. Results and Discussion
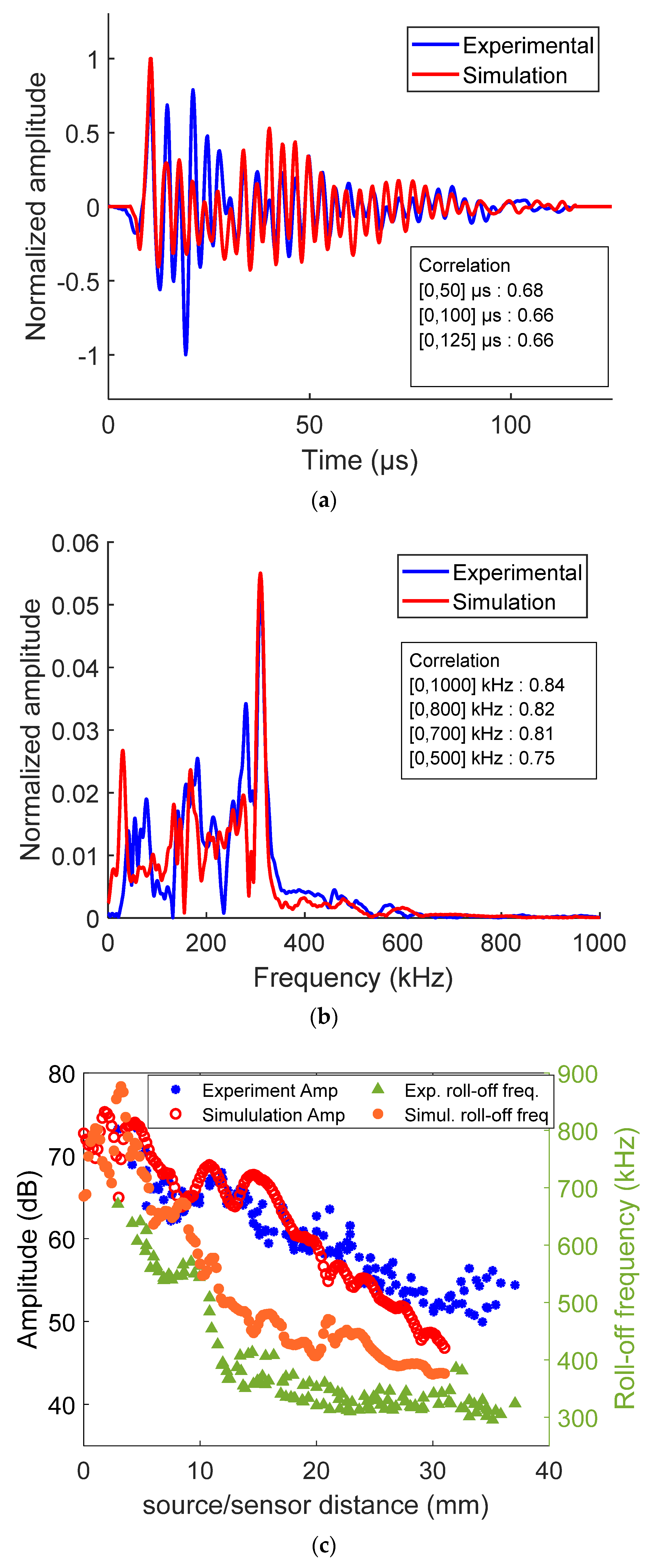
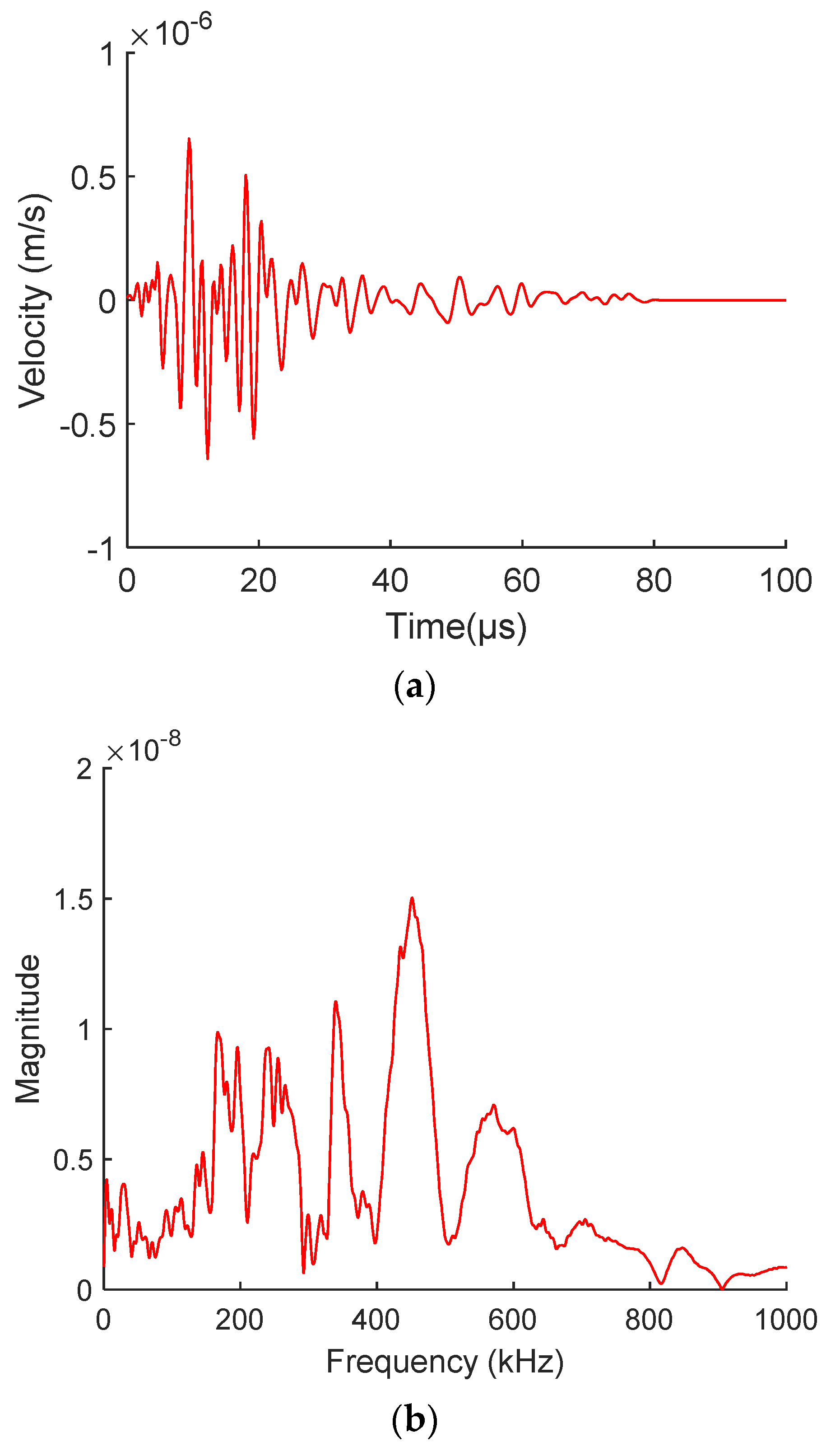
4.1. “Perfect” Signal Due to Validated Simulated Fiber Break
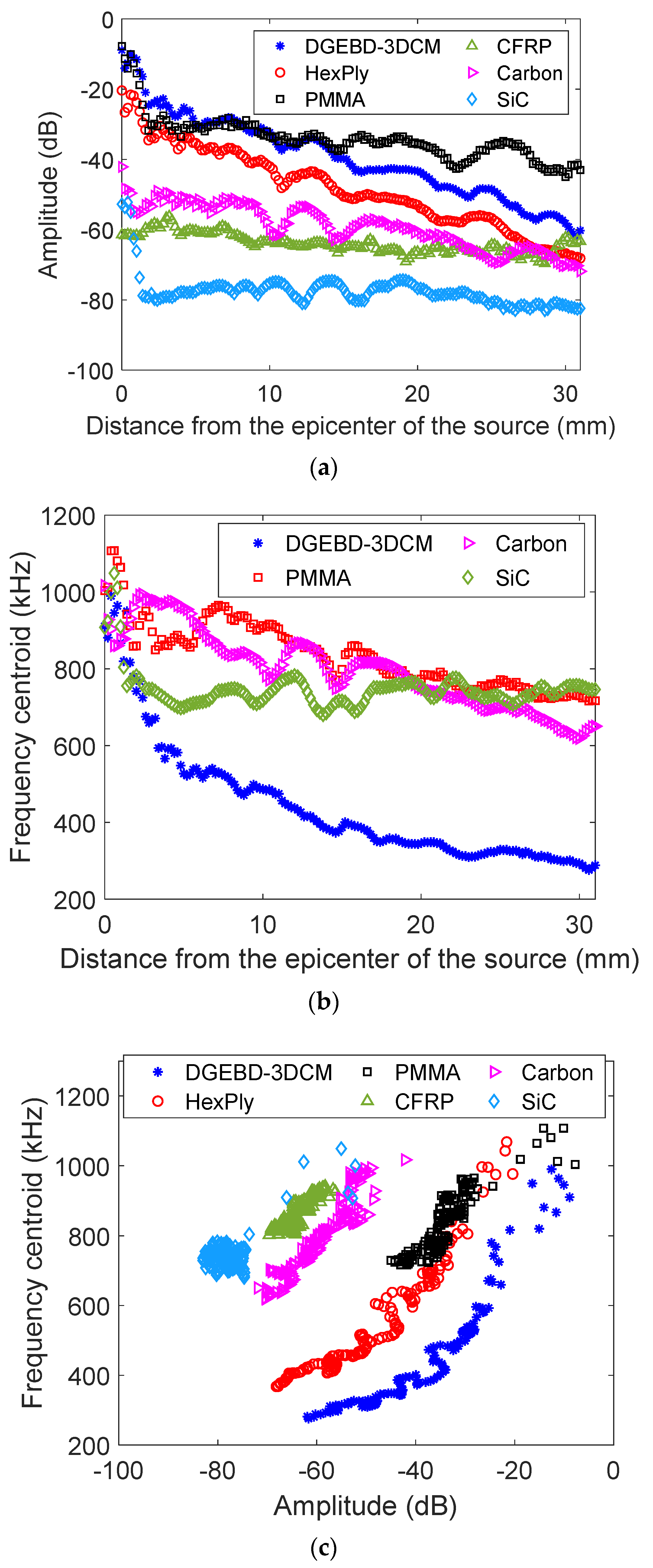
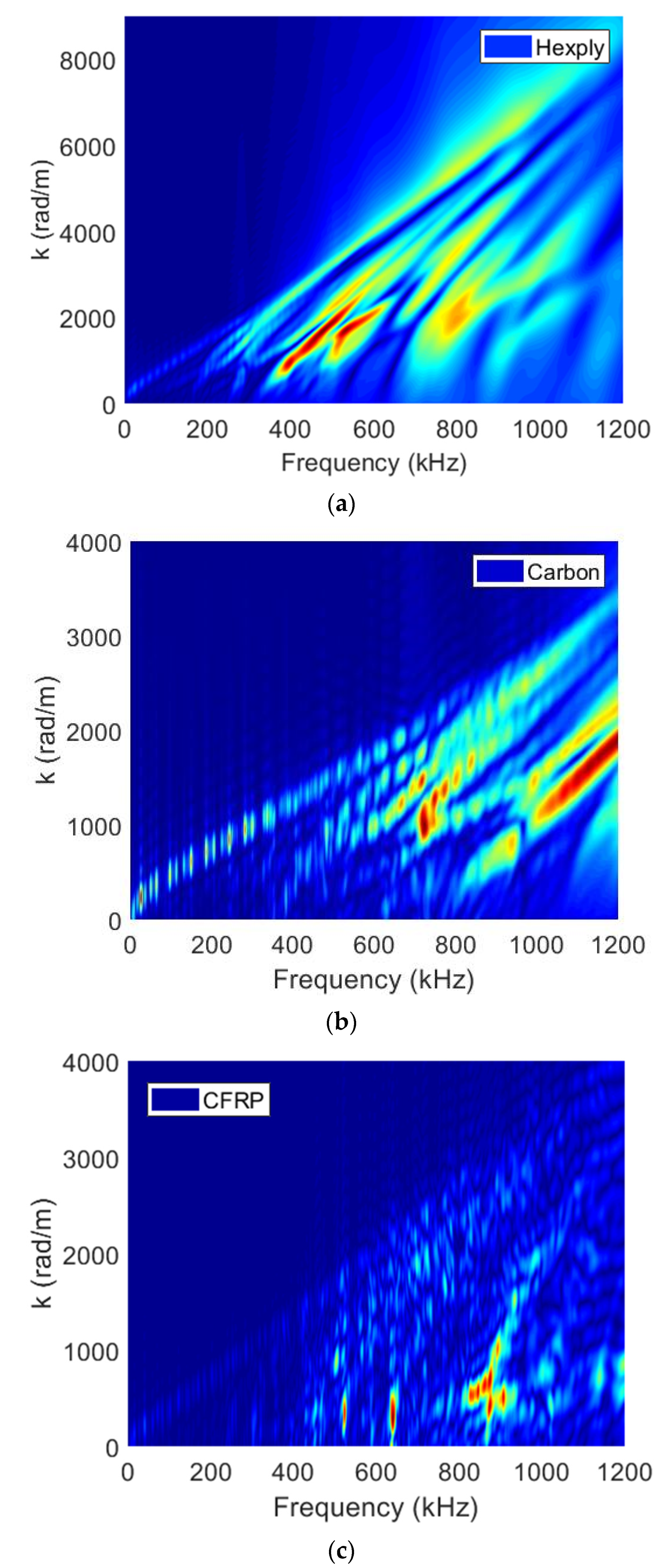
4.2. Influence of the Propagation Medium on AE Signals
4.3. Comparison between Fiber Break and Fiber/Matrix Debonding Signals Computed in DGEBD-3DCM Medium
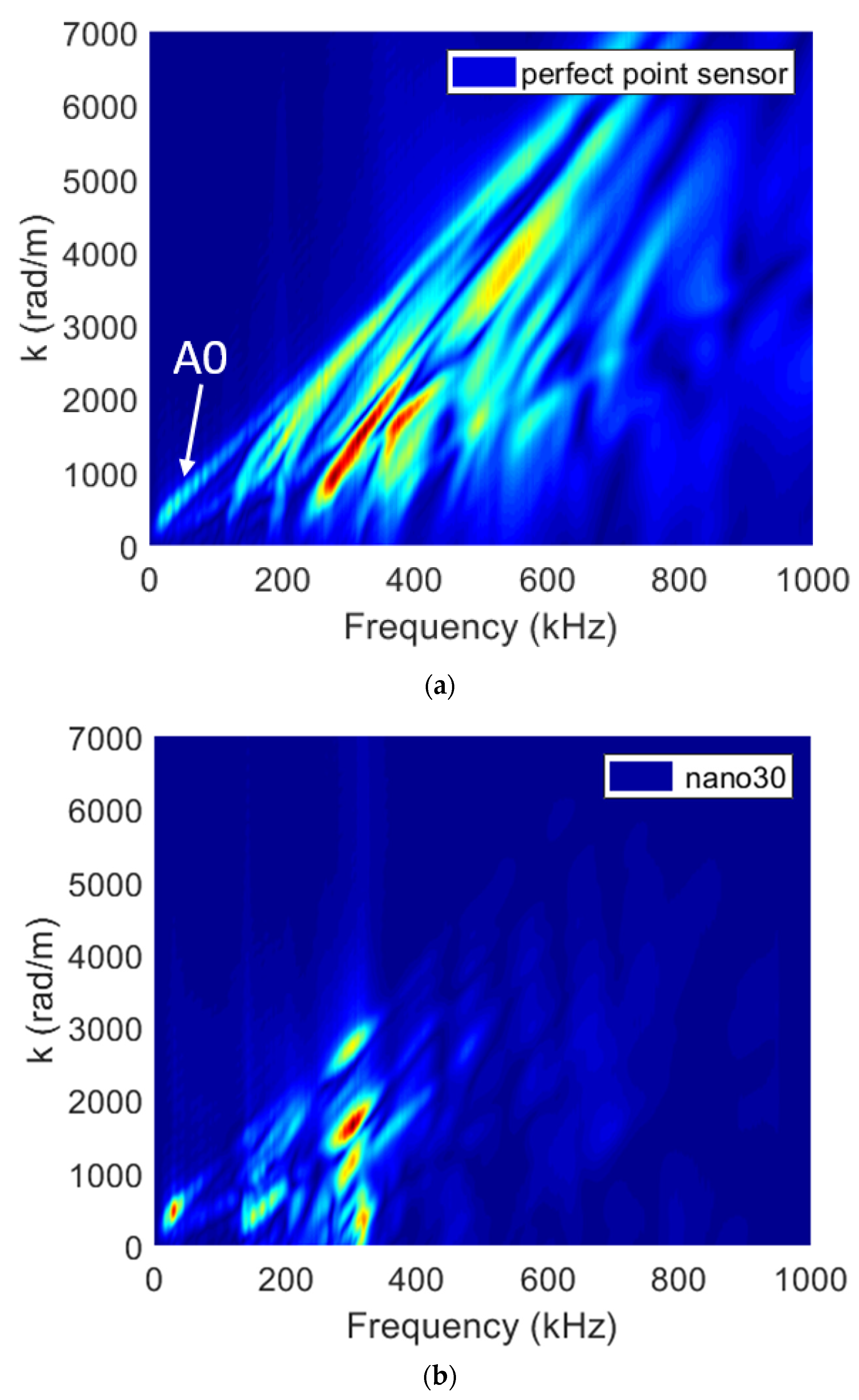
4.4. Sensor Effect and Capability to Detect and Identify the Different Sources
5. Conclusions
- 1.
- The amplitude of the signals resulting from debonding was much smaller than that from fiber break, even when the size of the debonding was large. On the other hand, instantaneous debonding and fiber break had very similar centroid frequencies.
- 2.
- Debonding also generated high-frequency waves but did not excite the same modes as did fiber break in the near field. Fiber break rather excited the fundamental antisymmetric mode at low frequencies. Nevertheless, this difference in the frequency distribution smeared out with propagation distance.
- 3.
- The acoustic signature for debonding was mostly affected by the debonding conditions (instantaneous debonding or progressive debonding). The signals obtained with progressive debonding had lower amplitude and frequency. For instantaneous debonding for different lengths, the amplitude was affected more than the frequency content. The effect of debonding conditions suggests that the use of a mechanical model of debonding would be more suitable for future work.
- 4.
- The dispersion modes depend on the mechanical properties of the matrix (Young’s modulus, density, etc.). The dispersion modes detected in polymer materials were much more numerous than in a ceramic material over the same frequency range up to 1 MHz. The viscoelastic nature of polymer materials significantly attenuated the frequency compared to ceramic materials. Young’s modulus plays an important role in the energy content of the signals. The higher the Young’s modulus, the lower the energy content of the signals is. This simulation confirmed the impossibility to obtain a universal signature for the same fiber break in several media. Our study shows that it is not possible to generalize the results of a fiber break signature (amplitude and frequency content) to all composite materials. Therefore, it is necessary to treat each medium independently.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Eleftheroglou, N.; Zarouchas, D.; Benedictus, R. An adaptive probabilistic data-driven methodology for prognosis of the fatigue life of composite structures. Compos. Struct. 2020, 245, 112386. [Google Scholar] [CrossRef]
- Godin, N.; Reynaud, P.; R’Mili, M.; Fantozzi, G. Identification of a Critical Time with Acoustic Emission Monitoring during Static Fatigue Tests on Ceramic Matrix Composites: Towards Lifetime Prediction. Appl. Sci. 2016, 6, 43. [Google Scholar] [CrossRef] [Green Version]
- Sause, M. In Situ Monitoring of Fiber-Reinforced Composites: Theory, Basic Concepts, Methods, and Applications; Springer Series in Materials Science; Springer: Berlin/Heidelberg, Germany, 2016; Volume 242. [Google Scholar]
- Godin, N.; Reynaud, P.; Fantozzi, G. Acoustic Emission and Durability of Composites Materials; John Wiley & Sons: Hoboken, NJ, USA, 2018; ISBN 9781786300195. [Google Scholar]
- Loutas, T.; Eleftheroglou, N.; Zarouchas, D. A data-driven probabilistic framework towards the in-situ prognostics of fatigue life of composites based on acoustic emission data. Compos. Struct. Compos. Struct. 2017, 161, 522–529. [Google Scholar] [CrossRef]
- Sause, M.; Schmitt, S.; Kalafat, S. Failure load prediction for fiber-reinforced composites based on acoustic emission. Compos. Sci. Technol. 2018, 164, 24–33. [Google Scholar] [CrossRef]
- Eleftheroglou, N.; Loutas, T. Fatigue damage diagnostics and prognostics of composites utilizing structural health monitoring data and stochastic processes. Struct. Health Monit. 2016, 15, 473–488. [Google Scholar] [CrossRef]
- Godin, N.; Reynaud, P.; Fantozzi, G. Contribution of AE analysis in order to evaluate time to failure of ceramic matrix composites. Eng. Fract. Mech. 2019, 210, 452–469. [Google Scholar]
- Racle, E.; Godin, N.; Reynaud, P.; Fantozzi, G. Fatigue lifetime of ceramic matrix composites at intermediate temperature by acoustic emission. Materials 2017, 10, 658. [Google Scholar] [CrossRef] [Green Version]
- Anastassopoulos, A.; Philippidis, T. Clustering methodology for the evaluation of acoustic emission from composites. J. Acoust. Emiss. 1995, 13, 11–12. [Google Scholar]
- Ramasso, E.; Placet, V.; Boubakar, L. Unsupervised consensus clustering of acoustic emission time-series for robust damage sequence estimation in composites. IEEE Trans. Instrum. Meas. 2015, 64, 3297–3307. [Google Scholar] [CrossRef] [Green Version]
- Morscher, G.N.; Godin, N. Use of Acoustic Emission for Ceramic Matrix Composites; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2014; pp. 569–590. [Google Scholar]
- Alia, A.; Fantozzi, G.; Godin, N.; Osmani, H.; Reynaud, P. Mechanical behaviour of jute fibre-reinforced polyester composite: Characterisation of damage mechanisms using Acoustic Emission and microstructural observations. J. Compos. Mater. 2019, 53, 3377–3394. [Google Scholar] [CrossRef]
- Guel, N.; Hamam, Z.; Godin, N.; Reynaud, P.; Caty, O.; Bouillon, E.; Paillassa, A. Data merging of AE sensors with different frequency resolution for the detection and identification of damage in oxide-based ceramic matrix composites. Materials 2020, 13, 4691. [Google Scholar] [CrossRef] [PubMed]
- Marec, A.; Thomas, J.-H.; El Guerjouma, R. Damage characterization of polymer-based composite materials: Multivariable analysis and wavelet transform for clustering acoustic emission data. Mech. Syst. Signal Process. 2008, 22, 1441–1464. [Google Scholar] [CrossRef]
- Barile, C.; Casavola, C.; Pappalettera, G.; Paramsamy Kannan, V. Application of different acoustic emission descriptors in damage assessment of fiber reinforced plastics: A comprehensive review. Eng. Fract. Mech. 2020, 235, 107083. [Google Scholar] [CrossRef]
- Godin, N.; Reynaud, P.; Fantozzi, G. Challenges and limitations in the identification of acoustic emission signature of damage mechanisms in composites materials. Appl. Sci. 2018, 8, 1267. [Google Scholar] [CrossRef] [Green Version]
- Kharrat, M.; Placet, V.; Ramasso, E.; Boubakar, L. Influence of damage accumulation under fatigue loading on the AE-based health assessment of composite material: Wave distortion and AE-features evolution as a function of damage level. Compos. Part A Appl. Sci. Manuf. 2018, 109, 615–627. [Google Scholar] [CrossRef]
- Carpinteri, A.; Lacidogna, G.; Accornero, F.; Mpalaskas, A.C.; Matikas, T.E.; Aggelis, D.G. Influence of damage in the acoustic emission parameters. Cem. Concr. Compos. 2013, 44, 9–16. [Google Scholar] [CrossRef]
- Maillet, E.; Baker, C.; Morscher, G.N.; Pujar Vijay, V.; Lemanski, J.R. Feasibility and limitations of damage identification in composite materials using acoustic emission. Compos. Part A 2015, 75, 77–83. [Google Scholar] [CrossRef]
- Oz, F.E.; Ersoy, N.; Lomov, S.V. Do high frequency acoustic emission events always represent fiber failure in CFRP laminates? Compos. Part A Appl. Sci. Manuf. 2017, 103, 230–235. [Google Scholar] [CrossRef]
- Aggelis, D.; Shiotani, T.; Papacharalampopoulos, A.; Polyzos, D. The influence of propagation path on elastic waves as measured by acoustic emission parameters. Struct. Health Monit. 2011, 11, 359–366. [Google Scholar] [CrossRef]
- Aggelis, D.G.; Matikas, T. Effect of plate wave dispersion on the acoustic emission parameters in metals. Comput. Struct. 2012, 98–99, 17–22. [Google Scholar] [CrossRef]
- Al-Jumaili, S.; Holford, K.; Eaton, M.; Pullin, R. Parameter Correction Technique (PCT): A novel method for acoustic emission characterisation in large-scale composites. Compos. Part B Eng. 2015, 75, 336–344. [Google Scholar] [CrossRef]
- Dietzhausen, H.; Dong, M.; Schmauder, S. Numerical simulation of acoustic emission in fiber reinforced polymers. Comput. Mater. Sci. 1998, 13, 23–30. [Google Scholar] [CrossRef]
- Prosser, W.H.; Hamstad, M.A.; Gary, J.; O’Gallagher, A. Finite Element and Plate Theory Modeling of Acoustic Emission Waveforms. J. Nondestruct. Eval. 1999, 18, 83–90. [Google Scholar] [CrossRef]
- Sause, M.G.; Richler, S. Finite element modelling of cracks as acoustic emission sources. J. Nondestruct. Eval. 2015, 34, 4. [Google Scholar] [CrossRef] [Green Version]
- Hamstad, M.A.; O’Gallagher, A.; Gary, J. Modeling of Buried Acoustic Emission Monopole and Dipole Sources with a Finite Element Technique. J. Acoust. Emiss. 1999, 17, 97–110. [Google Scholar]
- Scruby, C.; Wadley, H.; Hill, J. Dynamic elastic displacements at the surface of an elastic half-space due to defect sources. J. Phys. D-Appl. Phys. 1983, 16, 1069–1083. [Google Scholar] [CrossRef]
- Ohtsu, M.; Ono, K. A generalized theory of acoustic emission and source representations of acoustic emission. J. Acoust. Emiss. 1986, 5, 124–133. [Google Scholar]
- Ben Khalifa, W.; Jezzine, K.; Hello, G.; Grondel, S. Analytical modelling of acoustic emission from buried or surface-breaking cracks under stress. J. Phys. Conf. Ser. 2012, 353, 012016. [Google Scholar] [CrossRef]
- Le Gall, T.; Monnier, T.; Fusco, C.; Godin, N.; Hebaz, S.E. Towards quantitative acoustic emission by finite element modelling: Contribution of modal analysis and identification of pertinent descriptors. Appl. Sci. 2018, 8, 2557. [Google Scholar] [CrossRef] [Green Version]
- Sause, M.G.R.; Horn, S. Simulation of acoustic emission in planar carbon fiber reinforced plastic specimens. J. Nondestruct. Eval. 2010, 29, 123–142. [Google Scholar] [CrossRef]
- Hamstad, M.; O’Gallagher, A.; Gary, J. Effects of lateral plate dimensions on acoustic emission signals from dipole sources. J. Acoust. Emiss. 2001, 19, 258–274. [Google Scholar]
- Wilcox, P.; Lee, C.; Scholey, J.; Friswell, M.I.; Winsom, M.; Drinkwater, B. Progress Towards a Forward Model of the Complete Acoustic Emission Process. Adv. Mater. Res. 2006, 13–14, 69–76. [Google Scholar] [CrossRef]
- Cuadra, J.; Vanniamparambil, P.; Servansky, D.; Bartoli, I.; Kontsos, A. Acoustic emission source modeling using a data-driven approach. J. Sound Vib. 2015, 341, 222–236. [Google Scholar] [CrossRef]
- Moser, F.; Jacobs, L.J.; Qu, J. Modeling elastic wave propagation in waveguides with the finite element method. NDT E Int. 1999, 32, 225–234. [Google Scholar] [CrossRef]
- Åberg, M. Numerical modeling of acoustic emission in laminated tensile test specimens. Int. J. Solids Struct. 2001, 38, 6643–6663. [Google Scholar] [CrossRef]
- Burks, B.; Kumosa, M. A modal acoustic emission signal classification scheme derived from finite element simulation. Int. J. Damage Mech. 2014, 23, 43–62. [Google Scholar] [CrossRef]
- Suzuki, H.; Takemoto, M.; Ono, K. The fracture dynamics in a dissipative glass-fiber/epoxy model composite with the AE source simulation analysis. J. Acoust. Emiss. 1996, 14, 35–50. [Google Scholar]
- Sause, M.G.R.; Hamstad, M.A. Sensors and Actuators, Numerical modeling of existing acoustic emission sensor absolute calibration approaches. Sens. Actuators A Phys. 2018, 269, 294–307. [Google Scholar] [CrossRef]
- Gemmeren, V.; Graf, T.; Dual, J. Modeling the acoustic emissions generated during dynamic fracture under bending. Int. J. Solids Struct. 2020, 203, 84–91. [Google Scholar] [CrossRef]
- Giordano, M.; Condelli, L.; Nicolais, L. Acoustic emission wave propagation in a viscoelastic plate. Compos. Sci. Technol. 1999, 59, 1735–1743. [Google Scholar] [CrossRef]
- Zelenyak, A.M.; Schorer, N.; Sause, M.G.R. Modeling of ultrasonic wave propagation in composite laminates with realistic discontinuity representation. Ultrasonics 2018, 83, 103–113. [Google Scholar] [CrossRef] [PubMed]
- Dia, S.; Monnier, T.; Godin, N.; Zhang, F. Primary Calibration of Acoustic Emission Sensors by the Method of Reciprocity, Theoretical and Experimental Considerations. J. Acoust. Emiss. 2012, 30, 152–166. [Google Scholar]
- Goujon, L.; Baboux, J.C. Behaviour of acoustic emission sensors using broadband calibration techniques. Meas. Sci. Technol. 2003, 14, 903–908. [Google Scholar] [CrossRef]
- Zhang, L.; Yalcinkaya, H.; Ozevim, D. Numerical approach to absolute calibration of piezoelectric acoustic emission sensors using multiphysics simulations. Sens. Actuators A 2017, 256, 12–23. [Google Scholar] [CrossRef] [Green Version]
- Cervena, O.; Hora, P. Analysis of the conical piezoelectric acoustic emission transducer. Appl. Comput. Mech. 2008, 2, 13–24. [Google Scholar]
- Boulay, N.; Lhémery, A.; Zhang, F. Simulation of the spatial frequency-dependent sensitivities of Acoustic Emission sensors. J. Phys. Conf. Ser. 2018, 1017, 01200816. [Google Scholar] [CrossRef]
- Wu, B.S.; McLaskey, G.C. Broadband Calibration of Acoustic Emission and Ultrasonic Sensors from Generalized Ray Theory and Finite Element Models. J. Nondestruct. Eval. 2018, 37, 8. [Google Scholar] [CrossRef]
- Hamam, Z.; Godin, N.; Fusco, C.; Monnier, T. Modelling of Acoustic Emission Signals Due to Fiber Break in a Model Composite Carbon/Epoxy: Experimental Validation and Parametric Study. Appl. Sci. 2019, 9, 5124. [Google Scholar] [CrossRef] [Green Version]
- Lutz, V.; Duchet-Rumeau, J.; Godin, N.; Smail, F.; Lortie, F.; Gérard, J.F. Ex-PAN carbon fibers vs carbon nanotubes fibers: From conventional epoxy based composites to multiscale composites. Eur. Polym. J. 2018, 106, 9–18. [Google Scholar] [CrossRef]
- Bansal, N.P.; Lamon, J. Ceramic Matrix Composites: Materials, Modeling and Technology; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Dorvaux-Moevus, M. Mécanismes D’endommagement, Emission Acoustique et DUREES de vie en Fatigue Statique du Composite SiCf/[Si-B-C] aux Températures Intermédiaires (<800 °C). Ph.D. Thesis, University of Lyon, Villeurbanne, France, 2007. [Google Scholar]
- Doitrand, A.; Fagiano, C.; Carrère, N.; Chiaruttini, V.; Hirsekorn, M. Damage onset modeling in woven composites based on a coupled stress and energy criterion. Eng. Fract. Mech. 2017, 169, 189–200. [Google Scholar] [CrossRef]
- Tsangouri, E.; Aggelis, D.G. The influence of sensor size on acoustic emission waveforms—A numerical study. Appl. Sci. 2018, 8, 168. [Google Scholar] [CrossRef] [Green Version]
- Giordano, M.; Calabro, A.; Esposito, C.; D’Aùmore, A.; Nicolais, L. An acoustic-emission characterization of the failure modes in polymer-composite materials. Compos. Sci. Technol. 1998, 58, 1923–1928. [Google Scholar] [CrossRef]
- Morscher, G.N.; Gordon, N.A. Acoustic emission and electrical resistance in SiC-based laminate ceramic composites tested under tensile loading. J. Eur. Ceram. Soc. 2017, 37, 3861–3872. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elastic Modulus (GPa) | Poisson’s Ratio | Density (kg/m3) | Rayleigh Parameter | |||
|---|---|---|---|---|---|---|
| Fiber | Carbon | 187 | 0.22 | 1800 | - | - |
| Matrix type α | α1 DGEBD-3DCM | 1.41 | 0.38 | 1034 | 50,000 | |
| Matrix type α | α2 Hexply 913 [33] | 3.39 | 0.35 | 1230 | 50,000 | |
| Matrix type α | α3 PMMA [50] | 6.2 | 0.32 | 1160 | 1000 | |
| Matrix type β | β1 Carbone [53] | 35 | 0.22 | 2200 | 10,000 | |
| Matrix type β | β2 SiC [54] | 350 | 0.2 | 3150 | 10,000 | |
| Matrix type γ | CFRP [33] | D11 = 147.1; D12 = 4.11 D13 = 4.11; D22 = 10.59 D23 = 3.09; D33 = 10.59 D44 = 3.75; D55 = 5.97 D66 = 5.97 | 1550 | 10,000 | ||
| Fiber Break | L = 20 μm Model A | L = 100 μm Model A | L = 100 μm Model B | L = 100 μm Model C | L = 100 μm Model D | |
|---|---|---|---|---|---|---|
| Frequency centroid (kHz) | 370 | 400 | 405 | 397 | 339 | 327 |
| Peak Frequency (kHz) | 320 | 365 | 365 | 350 | 294 | 205 |
| Amplitude (dB) | Frequency Centroid (kHz) | Peak Frequency (kHz) | PP1 [0–125 kHz] (%) | PP2 [125–225 kHz] (%) | PP3 [225–450 kHz] (%) | PP4 [450–1200 kHz] (%) | |
|---|---|---|---|---|---|---|---|
| Fiber | 62 | 237 | 211 | 23 | 28 | 42 | 7 |
| L = 20 μm Model A | 21 | 282 | 302 | 15 | 23 | 52 | 10 |
| L = 100 μm Model A | 44 | 292 | 306 | 13 | 21 | 55 | 11 |
| L = 100 μm Model B | 42 | 288 | 299 | 14 | 22 | 53 | 10 |
| L = 100 μm Model C | 40 | 262 | 291 | 16 | 24 | 54 | 6 |
| L = 100 μm Model D | 34 | 226 | 167 | 28 | 29 | 36 | 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamam, Z.; Godin, N.; Fusco, C.; Doitrand, A.; Monnier, T. Acoustic Emission Signal Due to Fiber Break and Fiber Matrix Debonding in Model Composite: A Computational Study. Appl. Sci. 2021, 11, 8406. https://doi.org/10.3390/app11188406
Hamam Z, Godin N, Fusco C, Doitrand A, Monnier T. Acoustic Emission Signal Due to Fiber Break and Fiber Matrix Debonding in Model Composite: A Computational Study. Applied Sciences. 2021; 11(18):8406. https://doi.org/10.3390/app11188406
Chicago/Turabian StyleHamam, Zeina, Nathalie Godin, Claudio Fusco, Aurélien Doitrand, and Thomas Monnier. 2021. "Acoustic Emission Signal Due to Fiber Break and Fiber Matrix Debonding in Model Composite: A Computational Study" Applied Sciences 11, no. 18: 8406. https://doi.org/10.3390/app11188406