Corrigendum: Haptic Glove Using Tendon-Driven Soft Robotic Mechanism
 Siyeon Baik1,2
Siyeon Baik1,2  Shinsuk Park
Shinsuk Park Jaeyoung Park
Jaeyoung Park- 1Robotics and Media Institute, Korea Institute of Science and Technology, Seoul, South Korea
- 2Department of Mechanical Engineering, Korea University, Seoul, South Korea
A Corrigendum on
Haptic Glove Using Tendon-Driven Soft Robotic Mechanism
by Baik, S., Park, S., and Park, J. (2020). Front. Bioeng. Biotechnol. 8:541105. doi: 10.3389/fbioe.2020.541105
In the original article, there was a mistake in the legend for Figure 16 as published. We made an error on the numeric value of the significance level. The correct legend appears below.
“The mean rating of the four haptic feedback methods to render the contact force at the fingertip. The questionnaires are Q1: “Is the contact force realistic?,” Q2: “Can you feel the contact force at the fingertip?,” Q3: “Is the contact force unrealistic?” (the negative question of Q1), and Q4: “Can you not feel the contact force at the fingertip?” (the negative question of Q2). Error bars indicate the standard errors. *p < 0.05, ***p < 0.001.”
In the original article, the wrong version of Figure 11 was published. The correct Figure 11 appears below.
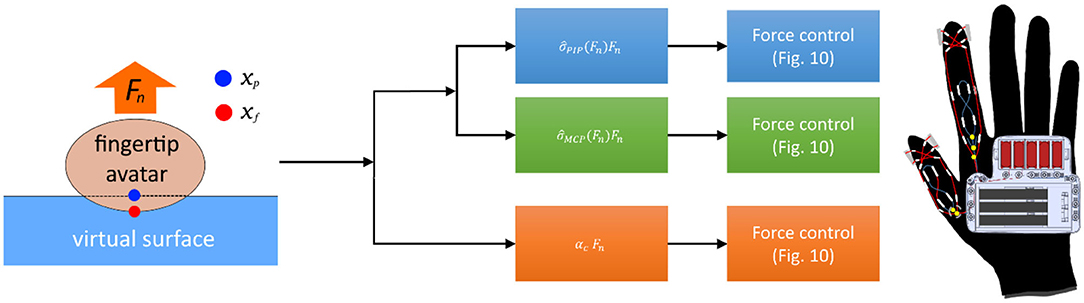
Figure 11. The system architecture for the proposed haptic glove system. The contact force between a user's fingertip avatar and a virtual object is calculated by collision detection (Virtual Environment). Then, the desired force for the cutaneous and kinesthetic feedback is calculated based on the Equations (2) and (4). The calculated force for the target joints and fingertip is then applied to the haptic glove.
In the original article, there was an error. We made an error in the nomenclature of the variable. A correction has been made to 3. Experimental Evaluation of Force Rendering With the Tendon-Driven Haptic Glove, 3.2 Measurement 2: Perception of Force Rendered at a Single Joint (PIP/MCP), 3.2.1 Experiment Design, paragraph 1:
“We used a standard one-interval two-alternative-forced-choice (1I-2AFC) experimental paradigm or a yes-no experiment to calculated the JND values of force for the two joints. The perception of the joint is characterized as a just noticeable difference (JND), from which we derived the Weber fraction (Macmillan and Creelman, 2004). For the derivation of a JND for a reference, the signal detection theory (SDT) defines the sensitivity index d′, which is a measure for how well one can discriminate the difference between the reference α0 and a comparison α0 + △α. The d′ value is calculated from stimulus response matrix, with the hit rate (H) and the false alarm rate (F) as follows:
where z(·) is the z-score function. Then, the JND is defined as the amount of the stimulus, denoted as (△α)0 increment for d′ = 1. Given the measurement data for a reference and multiple comparison stimuli, the JND value can be estimated as an inverse of the average slope, denoted as . Weber fraction (σs) is then estimated as
assuming the linearity between the d′ values and Δα. Then, the relative weight of each finger can be derived from the Equation (3).”
The authors apologize for these errors and state that this does not change the scientific conclusions of the article in any way. The original article has been updated.
Keywords: haptic interface, tendon-driven mechanism, wearable interface, cutaneous feedback, kinesthetic feedback
Citation: Baik S, Park S and Park J (2020) Corrigendum: Haptic Glove Using Tendon-Driven Soft Robotic Mechanism. Front. Bioeng. Biotechnol. 8:630005. doi: 10.3389/fbioe.2020.630005
Received: 16 November 2020; Accepted: 18 November 2020;
Published: 11 December 2020.
Approved by:
Frontiers Editorial Office, Frontiers Media SA, SwitzerlandCopyright © 2020 Baik, Park and Park. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Jaeyoung Park, jypcubic@kist.re.kr