Paper:
Arbitrary Attitude Hovering Control of Quad Tilt Rotor Helicopter
Masafumi Miwa*, Shinji Uemura**, and Akitaka Imamura***
*Institute of Science and Technology, Tokushima University
2-1 Minamijosanjia, Tokushima city, Tokushima 770-8506, Japan
**Graduate School of Advanced Technology and Science, Tokushima University
2-1 Minamijosanjia, Tokushima city, Tokushima 770-8506, Japan
***Department of Electronics, Information and Communication Engineering, Osaka Sangyo University
3-1-1 Nakagaito, Daito, Osaka 574-8530, Japan

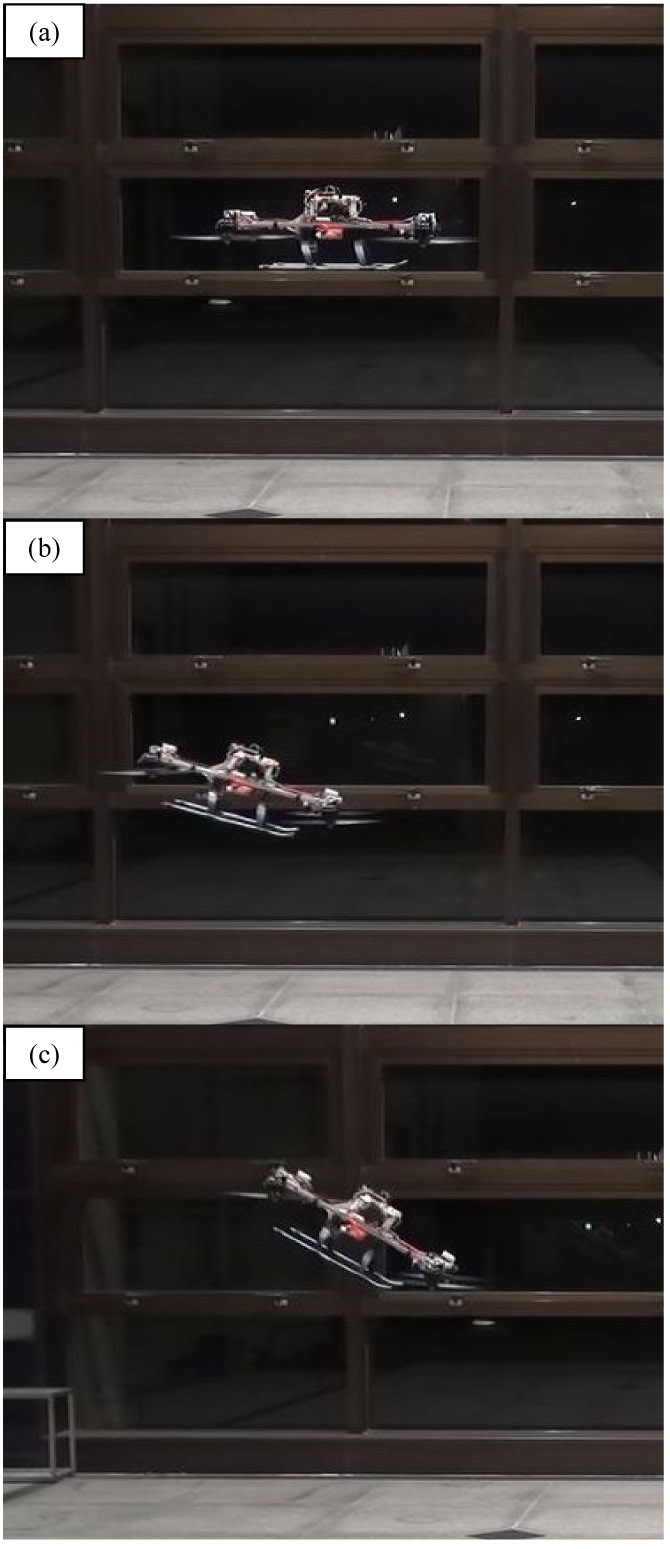
Arbitrary attitude hovering
- [1] D. Lee, H. Lim, H. J. Kim, Y. Kim, and J. K. Seong, “Adaptive image-based visual servoing for an under-actuated quadrotor system,” J. of Guidance, Control, and Dynamics, Vol.35, No.4, pp. 1335-1353, 2012.
- [2] D. Pebrianti, F. Kendoul, S. Azrad, W. Wang, and K. Nonami, “Autonomous hovering and landing of a quad-rotor micro aerial vehicle by means of on ground stereo vision system,” J. of System Design and Dynamics, Vol.4, No.2, pp. 269-284, 2010.
- [3] I. Sa and P. Corke, “Estimation and control for an open-source quadcopter,” Proc. of Australian Conf., Robotics and Automation, December 7, 2011.
- [4] M. Miwa, S. Uemura, Y. Ishihara, A. Imamura, J. H. Shim, and K. Ioi, “Evaluation of Quad Ducted-fan Helicopter,” Int. J. of Intelligent Unmanned Systems Information, Vol.1, No.2, pp. 187-198, 2013.
- [5] M. Miwa, Y. Shigematsu, and T. Yamashita, “Control of Ducted Fan Flying Object Using Thrust Vectoring,” J. of System Design and Dynamics, Vol.6, No.3, pp. 322-334, 2012.
- [6] M. Miwa and S. Maruhashi, “Ducted Fan Flying Object with Normal and Reverse Ducted Fan Units,” Int. J. Robotics and Mechatronics, Vol.1, No.1, pp. 8-15, 2014.
- [7] S. Suzuki, R. Zhijia, Y. Horita, K. Nonami, G. Kimura, T. Bando, D. Hirabayashi, M. Furuya, and K. Yasuda, “Attitude control of quad rotors QTW-UAV with tilt wing mechanism,” J. of System Design and Dynamics, Vol.4, No.3, pp. 416-428, 2010.
- [8] E. Cetinsoy et al., “Design and development of a tilt-wing UAV,” Turk J. Elec Eng & Comp Sci, Vol.19, No.5, pp. 733-741, 2011.
- [9] A. Imamura, Y. Urashiri, M. Miwa, and J. Hino, “Flight Characteristic of Quad Rotor Helicopter with Tilting Rotor,” J. of Instrumentation Automatiion and Systems, Vol.2, No.1, pp. 56-63, 2015.
- [10] A. Imamura, S. Uemura, M. Miwa, and J. Hino, “Flight Characteristics of Quad Ducted Fan Helicopter with Thrust Vectoring Nozzles,” The J. of Unmanned System Technology, Vol.2, No.1, pp. 54-61, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.