

Abstract
Nowadays, there is a growing awareness on the social and economic importance of the ocean. In this context, being able to carry out a diverse range of operations underwater is of paramount importance for many industrial sectors as well as for marine science and to enforce restoration and mitigation actions. Underwater robots allowed us to venture deeper and for longer time into the remote and hostile marine environment. However, traditional design concepts such as propeller driven remotely operated vehicles, autonomous underwater vehicles, or tracked benthic crawlers, present intrinsic limitations, especially when a close interaction with the environment is required. An increasing number of researchers are proposing legged robots as a bioinspired alternative to traditional designs, capable of yielding versatile multi-terrain locomotion, high stability, and low environmental disturbance. In this work, we aim at presenting the new field of underwater legged robotics in an organic way, discussing the prototypes in the state-of-the-art and highlighting technological and scientific challenges for the future. First, we will briefly recap the latest developments in traditional underwater robotics from which several technological solutions can be adapted, and on which the benchmarking of this new field should be set. Second, we will the retrace the evolution of terrestrial legged robotics, pinpointing the main achievements of the field. Third, we will report a complete state of the art on underwater legged robots focusing on the innovations with respect to the interaction with the environment, sensing and actuation, modelling and control, and autonomy and navigation. Finally, we will thoroughly discuss the reviewed literature by comparing traditional and legged underwater robots, highlighting interesting research opportunities, and presenting use case scenarios derived from marine science applications.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 license. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
The ocean covers approximately 71% of the planet surface, with more than 50% of it below 3000 m depth, and to date, only around the 5% of it has been explored [1–5]. It deeply affects our life on planet Earth at various levels. It plays a critical role in the balancing of the global ecosystem, contributing to climate regulation and hosting a wide range of diverse environments and biological species [6, 7]. It is a source of energy and resources, with its precious mineral deposits, oil and gas reservoirs, as well as fish, which is consumed daily by a large part of the world's population [8]. Furthermore, it is among the main transportation channels for the global economy, and coastal areas attract millions of tourists every year [9]. Several underwater infrastructures have been constructed, ranging from harbours [10] and offshore platforms [11], to aquaculture plants [12] and submerged networks of monitoring stations [13, 14]. In this context, being able to operate in different underwater environments is critical for an effective exploitation of the ocean's resources. At the same time, complex ecological monitoring and exploration activities are fundamental to increase our knowledge of the marine ecosystems and understand the effects of human activities to guarantee a sustainable level of exploitation and protection [15]. Humans, by means of SCUBA diving techniques, can only venture in shallow waters and for a limited amount of time. For this reason, many underwater robots have been developed and operated since the second half of the last century.
Just like marine creatures, depending on the environment in which they operate, underwater robots can be classified as pelagic or benthic [16]. Pelagic and benthic robots present completely different conceptual designs with complementary characteristics (table 1), which make them suitable for different applications and tasks. Most existing underwater robots are pelagic, they are neutrally buoyant (or slightly positive), and they 'swim' in the water column by means of thrusters. They can be teleoperated through an umbilical cable, which provides real-time data transmission and power (remotely operated vehicles or ROVs), or they can be programmed to execute pre-defined missions with increasing levels of autonomy (autonomous underwater vehicles or AUVs). In general, pelagic robots exhibit high mobility in three dimensions, they can sense the surrounding environment with optical or acoustic sensors and count on a wide field of view. Naturally, the presence of a tether limits the 3D mobility of ROVs with respect to AUVs, but it allows live streaming of footage and the execution of teleoperated manipulation tasks for those equipped with a gripper [17, 18]. These characteristics make pelagic robots suitable for the exploration and survey of large areas. On the other hand, due to their 'swimming' nature, pelagic robots must continuously counteract the disturbance of currents while maintaining a fixed position. For this reason, they introduce a considerable acoustic disturbance even during stationary operations, and they tend to stay away from the seabed to prevent any accidental crash or sediment resuspension caused by the hydrodynamic disturbance of their propellers. This promoted research on advanced control algorithms, sensory fusions methodologies, and advanced modelling of hydrodynamic phenomena, that have intrinsic limitations in terms of power consumption, processing power, costs of components, and gap between models and reality. In a completely different approach, benthic robots were introduced to overcome these limitations and enable effective seabed operations. Benthic robots are negatively buoyant and move directly on the seabed. They are almost unaffected by hydrodynamic disturbances, and they can keep a fixed position passively. The most common conceptual design for benthic robots is based on tracks or wheels. These robots are called benthic crawlers (or simply crawlers) and are usually remotely operated [19, 20]. Recently, to enable long-time monitoring of deep-sea processes, autonomous versions of crawlers, namely rovers, have been developed [21]. Regardless of their degree of autonomy, benthic robots are constrained to two-dimensional motion on the seabed. Their mobility workspace and field of view are limited with respect to pelagic robots, but their stability and passive station keeping capability makes them suitable for repetitive monitoring tasks and for long time operations. Notwithstanding the advantages of crawlers over pelagic robots in the benthic environment, they still present intrinsic drawbacks in terms of mobility and impact on the seabed that limit the execution of relevant tasks. Crawlers cannot move on rocky terrains and need almost continuous ground [22, 23]. At the same time, their tracks cause significant sediment resuspension, which affects the quality of video recording and impairs the visibility of the operator. Finally, crawlers leave a significant footprint on the sediment, which can damage sessile and motile fauna and depending on the hydrodynamic conditions at the site, can remain present for long periods after the operations [19].
Table 1. Qualitative comparison between pelagic and benthic robots, where different colours identify our evaluation on the mentioned features.
| Pelagic robots | Benthic robots | ||||
|---|---|---|---|---|---|
| ROV | AUV | Crawlers | ULR | ||
| Mobility | |||||
| Field of view | Very good | ||||
| Energy consumption | Good | ||||
| Acoustic disturbance | Medium | ||||
| Disturbance of benthic environment | Poor | ||||
| Station keeping performance | Very Poor | ||||
| Hardware complexity | |||||
| Control complexity | |||||
In the last 30 years, researchers have started to look at legged robots as a possible alternative to seabed crawlers to ensure stable and agile locomotion, safe and effective interaction with the seabed, and reduced environmental disturbance (figure 1, [24]). The works are heterogeneous and range from the presentation of mathematical models and simple demonstrator operated in tanks, to reports on field operations of large, complex robots. The robots presented differ in number and configuration of legs, actuation system, payload, proposed control strategies, and envisioned application.

Figure 1. ULRs are benthic robots which propel themselves by means of the interaction of their legs with the seabed. Thanks to their morphology, they can ensure stable and agile locomotion, safe interaction with the seabed and reduced environmental disturbance. In the figure, the ULR SILVER2 during field trials at 16 m depth in Savona, Italy. Reproduced with permission from Igor D'India, 'Abyss Cleanup' vlog.
Download figure:
Standard image High-resolution imageIn this work, we aim at reviewing the state of the art on underwater legged robots (ULRs), highlighting the different conceptual designs and technology used, specific applications and challenges for the future. The remainder of the paper is structured as follows: first, the latest challenges and advancements in the field of underwater robotics are presented, followed by a brief historical perspective on terrestrial legged robotics, highlighting the most recent achievements; then, the literature on ULRs is revised by comprising both ULRs for which extensive field testing was reported, and those that have been tested only in controlled environment in the lab. The paper is concluded by discussions and conclusions.
2. State of the art in traditional underwater robotics
The development of ULRs is an extremely challenging task, not only because of the complex morphology and high number of degrees of freedom (DoFs) to coordinate for locomotion, but also because the harshness of the underwater environment demands for specialized solutions in terms of mechanical design, construction materials, communication, and sensing technologies. Many technologies commonly adopted on terrestrial autonomous mobile robots cannot be used underwater, as for example GPS, with critical consequences on the implementation of localization and navigation tasks, or vision-based solution, often hindered by low visibility and refractions. With this regard, literature on traditional underwater robotics can help us to understand how challenges related to sensing and autonomy have been solved and how they can be adapted to the specific challenges of legged robotics. At the same time, by revising the state-of-the-art in traditional underwater robotics, we aim at using (or defining in case they are missing) objective performance metrics to allow for a quantitative comparison among the difference classes of underwater robots to guide end-users in the choice of the most adequate robotic platform for their needs. While extensive specialist reviews are suggested for this complex research topic, some salient results are reported here for the readers' convenience.
ROVs are the most widely used category of underwater robots [25]. They are remotely operated through an umbilical cable and, depending on their size and payload, they may need a specialised vessel to be deployed. They are the standard tool for several subsea operations, especially in the oil and gas and marine science (e.g. bio-geological) applications, as they can perform several tasks from construction and repairing to inspection and maintenance, as well as sediment and species sampling. Their ability to safely interact with the environment or submerged structures is heavily dependent on the skills of the operator, thus that recent works focused on shared autonomy and haptic feedback to get the most out of those platforms [26, 27]. AUVs, developed since the 1990s, removed the need for the umbilical cable and support vessel and enabled fast and large-scale surveys of the seabed [28]. They are typically capable of estimating their position through dead reckoning, fusing data from attitude and heading reference systems (AHRSs), Doppler velocity logs (DVLs), and pressure sensors. The unavoidable drifting of the position estimation is usually constrained by occasionally resurfacing to acquire a GPS fix or by resorting to underwater navigation systems with different ranges and resolutions such as long baseline (LBL), short baseline (SBL) or ultra short baseline (USBL). AUVs are used in various sectors including defence, oil and gas, and marine science for inspection, surveying, and surveillance applications. Most of such tasks are based on the capability of AUVs to perform seabed mapping and reconstruction through different sensing technologies [29], enabling terrain-aided navigation [30], autonomous exploration and obstacle avoidance [31] with performance depending on the resolution of the seabed reconstruction. Unlike ROVs, most AUVs are not able to interact with underwater structures or with the seabed for close inspection and manipulations. Recently, to overcome the poor interaction capabilities of AUVs and implement autonomous free-floating manipulation, intervention AUVs (I-AUVs) have started to be developed [28]. Such novel platforms require a higher operating precision with respect to traditional AUVs. They resort to optical cameras, stereo cameras, imaging sonar and laser scanners (or a combination of them), often fused with data from AHRS, DVLs and pressure sensors to perform simultaneous localization and mapping (SLAM) and reconstruction of underwater structures, to navigate in the environment, avoid obstacles, and perform autonomous inspection and manipulation tasks. Among the most recent studies, intervention on a subsea valve panel was demonstrated with a Girona 500 AUV employing a monocular camera-based SLAM [32]. When instead a 3D reconstruction is required, sensors that generate point clouds are preferred. In this context, especially when the observed scene is not rich in features, laser scanners can outperform stereo cameras using structured light projections. Recent applications of laser scanner technologies include 3D inspection of underwater structures [33] and object picking on the bottom of a tank [34]. When persistent operations on the seabed are required, researchers often prefer to resort to benthic crawlers, which combine the stability of fixed platforms such as landers with track-based mobility [19]. For example, the internet-operated deep-sea crawler 'Wally' has been deployed to perform linear transects (30 m at 0.04 m s−1 speed corresponding to 20% of motor power) while acquiring videos and multiparametric data for ecological status assessment [19]. Autonomous versions of benthic crawlers have also been proposed for both exploration and monitoring purposes. The Benthic Rover II was deployed off the coast of central California to acquire long time-series measurements of seafloor processes related to the deep-ocean carbon cycle [35] rover flat terrains. The VIATOR crawler, resulting from the combined expertise of deep-sea and space scientists, enabled the mapping and monitoring of large areas on the seafloor in combination with the fixed docking station MANSIO for recharging and data transmission [36].
3. Terrestrial legged robotics
Thanks to their discrete footholds and high number of DoFs, legged systems can negotiate irregular terrains, avoid obstacles, and interact with the ground safely and delicately [37]. Their gaits can be adapted to dynamically changing and unstructured environments and the motion of the body can be decoupled from the footholds, providing a sort of active suspension to improve data acquisition, protect the payload and provide additional DoFs in manipulation tasks. For this reason, the idea of developing terrestrial legged machines has been explored since the second half of the last century. Literature on terrestrial legged robots is extremely vast and features prototypes with one, two, four, six and more legs. While a complete survey of the state of the art in terrestrial legged robotics is outside the scope of this paper, in this paragraph we aim at retracing the evolution of the field and pinpointing the most important achievements (figure 2) to understand what can be directly transferred underwater, what can be adapted and what must be investigated from scratch.

Figure 2. Brief history of terrestrial legged robotics from early developments to the latest applications enabled by artificial intelligence. (A) The walking truck from General Electrics (credits to Larry Pieniazek); (B) A quadruped from the MIT's legged laboratory [38]; (C) A spot mini during the Darpa SubT Challenge (Courtesy of NASA/JPL).
Download figure:
Standard image High-resolution imageEarly studies focused on the development of linkage mechanisms and kinematic models for the legs [39]. Linkages were usually driven by a cam system connected to a single actuator. Consequently, these machines were constrained to perform a single gait with poor terrain adaptability. General Electric overcame this limitation by demonstrating terrain adaptability of a manned quadruped [40] with a total of 12 DoFs independently actuated by hydraulic pistons. Operating this machine through leverages and pedals was a demanding task, feasible only by skilled operators, and revealed the need for an automatic control system. The advent of computers revolutionized legged robotics, allowing the automatic coordination of several DoFs and the integration of sensors for closed loop control. In this phase, legged robots were based on static stability—i.e. stability is maintained by keeping the projection of the centre of gravity (CoG) is always within the polygon of support of the legs—and research focused on the development of slow static gaits [41], capable of satisfactory performance on regular grounds but requiring a very detailed knowledge of the terrain to be negotiated through exact foot positioning. Such adaptation strategy required very precise terrain perception and significant computational power to iteratively solve the inverse kinematics of the robots.
In the eighties, biomechanical studies on human locomotion took advantage of high frequency motion tracking systems [42] and the mathematical theory of dynamical systems [43–46], giving a new impulse to the field of legged robotics. Particularly, these tools suggested how robots could move with dynamically stable modalities, such as running, and harness compliant elements in the leg design (either virtually emulated or physically embedded in the structures) to enhance stability and terrain negotiation performance even in absence of a detailed terrain map [47, 48]. Along with upgraded designs, novel control strategies were proposed to coordinate the high number of DoFs by means of hierarchical control structures [38, 49]. These advancements are not merely relevant as academic results, as dynamical locomotion and compliance empower robots of energetic autonomy over longer usage time, therefore allowing for untethered and free movement into unknown environments. Moreover, the development of high performance electric and hydraulic actuation systems, allowed legged robots to reach unprecedented locomotion performance in terms of speed, agility, terrain negotiation and balance, even for bipedal robots, compensating their naturally lower level of static stability [50, 51].
In the last 20 years, increased computational power and improvements in state estimation algorithms and computer vision technologies allowed legged robots to enlarge their basic locomotive behaviours with complex goal-oriented tasks, which include SLAM, mission planning and active obstacle negotiation [52–54]. These technological advancements also allowed for the commercialization of several legged robots. The list of off-the-shelf terrestrial legged robots is long, and it includes bipeds, such as TALOS from PAL Robotics (https://pal-robotics.com/robots/talos/) or ATLAS from Boston Dynamics (www.bostondynamics.com/atlas), quadrupeds, such as ANYmal from ANYbotics (www.anybotics.com/anymal-autonomous-legged-robot/), Go1 from Unitree Robotics (www.unitree.com/products/go1/), or Spot Mini from Boston Dynamics (www.bostondynamics.com/products/spot), and several hexapod robot development kits. Consequently, the research interest has progressively shifted from hardware design and basic locomotion control towards implementing advanced locomotion capabilities and autonomous behaviours. The advent of Machine Learning and Artificial Intelligence into the framework of robotic control, gave a further thrust to legged robotics. As humans and animals have the ability to continually acquire, fine-tune, and transfer knowledge and skills throughout their lifespan, it appeared clear that robotics systems aimed to be employed in natural environments must generalize across experiences and retain memory of relevant events [55]. Particularly, in the last 15 years learning has been employed for several purposes. Examples include the classification of terrains and terrain mapping based on limited sensor sets [37, 56, 57], learning of feasibility constraints, gait and manoeuvres development including manipulation [58], and tuning of acquired knowledge or reaction to damages. These algorithms and behaviours have been widely investigated both in indoor, feature-rich environments [37] and natural outdoor scenarios [59].
The results of research in legged robotics have reached a maturity that allows these robots to be used in real applications, which benefit from their superior locomotion capabilities, compared to traditional existing robots. This path has been strongly incentivized by Robotics Challenges: starting with the Defence Advanced Research Projects Agency (DARPA) Robotics Challenge [60], the World Robotics Summit [61] and the RoboCup Rescue Robot League. In particular, the top six scoring teams of the DARPA SubT Challenge (2021) included legged robots, either by themselves or operating in collaboration with other agents, such as drones or tracked vehicles [62, 63].
4. Underwater legged robotics
While the results achieved by legged robots on land are astonishing, and would be incredibly useful also on the seabed, the underwater environment poses complex challenges to the developers of ULRs, which do not allow a direct transposition. Actuators and electronics must be protected from saltwater, and materials used in construction must be able to resist fouling, rust, and corrosion and most of all, pressure (whose augment depends upon the envisaged operational scenario). In addition, the contribution of the underwater environment to the dynamics of the legged robots must be accounted for in terms of hydrodynamic drag forces, added mass [64], and buoyancy. While such contribution may look like a disturbance to be rejected, the interaction between the robot and the fluid may be harnessed to improve stability and implement efficient underwater-specific legged gaits. Finally, the localization and perception of ULRs cannot count on several key technologies used by their terrestrial counterparts such as for example GPS, which does not work underwater, and vision-based techniques, which are often hindered in turbid waters.
Research on ULR is relatively recent as it started in the second half of the 80 s and, at the time of writing, it accounts for over 100 publications with a growing trend (figure 3(E)). Among the numerous heterogeneous prototypes presented in literature (e.g. figures 3(A)–(D)), we have observed a clear distinction between robots tested in the lab and those tested in the field. Such distinction is a consequence of the harshness of the underwater environment and reflects the two main paths that research on ULRs may take. The majority of ULRs developed to date aimed at demonstrating advanced capabilities lacking in the state of the art, or at investigating hypothesis on animal behaviour. In this case, the robotic demonstrators were deployed in a lab to benefit from a fully controlled environment and to avoid wasting resources on making the demonstrator ready for the field. The research focus is on bioinspiration, artificial intelligence, neuroscience, and innovative sensing and actuation technologies. At the same time, ULRs can also be developed as tools for marine operations. In this case, the research is more application driven and it focuses on the integration of end-user requirements, and marine engineering subjects. In this section, we review the literature on ULRs to highlight the specific solutions adopted in terms of [1] interaction with the underwater environment [2], sensing and actuation technologies [3], modelling and control, and [4] autonomy and navigation. A subsection will be dedicated to the ULRs that have been tested in the field, providing details on their construction and payloads, and highlighting how the novelties introduced can be transposed to the field.

Figure 3. (A)–(D) Examples of underwater legged robots (ULRs) and (E) publication trend on ULRs. (A) CR200. Adapted from tonynetone, www.flickr.com/photos/tonynetone/33303857416. CC BY 2.0. (B) Diverbot. Adapted from [65] CC BY 4.0. (C) SILVER2. Reproduced with permission from Igor D'India, 'Abyss Cleanup' vlog. (D) Amphibious crab-like robot with bio-inspired dactyls. Adapted from [66] © IOP Publishing Ltd. All rights reserved.
Download figure:
Standard image High-resolution image4.1. Interaction with the underwater environment
Unlike their terrestrial counterparts, ULRs are immersed in a dense fluid, and they are consequently subjected to different physical effects figure 4. In short, buoyancy makes the bodies lighter, while the hydrodynamic effects damp the movements and generate forces which depend on the relative velocity and orientation between the fluid and robot. Additionally, ULRs must operate on different types of seabed, which may affect the locomotion dynamics differently, and which can be harnessed to enhance their stability during manipulation tasks or in presence of disturbances.
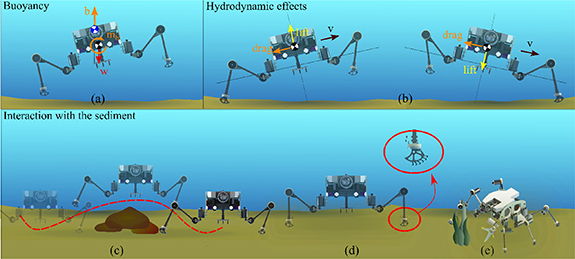
Figure 4. Interaction of ULRs with the underwater environment. (a) The weight of bodies underwater is lighter due to buoyancy. If the centre of buoyancy is above the centre of gravity a stabilizing moment which tends to bring the ULRs with feet down is generated. (b) Hydrodynamic effects damp the movements and generate forces which depend on the relative velocity and orientation between the surrounding water and the robot. Some ULRs harness the hydrodynamic effects to stabilize dynamic locomotion strategies or to prevent currents from overturning them. Interaction with the sediment plays a very important role and can yield great advantages. (c) Rocks can be overcome by pushing onto the sediment to hop or planning the most suitable leg trajectory. (d) The use of dactyls or microspines allows to grasp the sediment, improve locomotion stability and counteract the disturbance of currents. (e) ULRs can take advantage of their leg to adopt the most suitable pose in intervention tasks while introducing a limited disturbance.
Download figure:
Standard image High-resolution image4.1.1. Buoyancy
In terms of forces, weight is dominating on land, whereas underwater, buoyancy and hydrodynamics are just as important. In crustaceans, buoyant forces can be 80%–99% of the weight [67] allowing these animals to push onto the substrate and gently glide over rocks and all kinds of terrains. Among the prototypes presented in this review, only SILVER2 [24] and its ancestors [68–71] explicitly accounted for this, enabling it to hop on the seabed and overcome obstacles of about 20 cm [24]. In general, being able to exploit buoyancy, constitutes a major difference with respect to terrestrial legged robots and may yield great benefits in field operations. In terms of locomotion stability, buoyancy can be of great help, as keeping all buoyant elements in the upper side of the body generates a moment which tends to stabilise ULRs with legs down figure 4(c). However, due to the presence of sealed canisters to protect motors in the legs, some ULRs present highly buoyant elements in a relative motion among each other. The developers of the underwater quadruped, AquaShoko [72], tried to harness this drawback to enable a controlled descent with minimal risk of overturning by regulating the legs position, to modulate the relative position of the CoG and centre of buoyancy. Being able to regulate the underwater weight of ULRs through some sort of buoyancy control device or adapting the buoyancy engines used by gliders [73] has never been attempted before, but it would have interesting implications. Transitioning from negative to positive buoyancy would allow simple resurfacing procedures. Multimodal vehicles, implementing both benthic and pelagic forms of locomotion, such as the hexapod CR200 [74], capable of walking and swimming, or the hybrid robot Diverbot [65], capable of bipedal locomotion and propeller-driven mobility, need a similar device to transition from negative to neutral buoyancy when passing from benthic to pelagic mode. Finally, ULRs adopting a hopping-based locomotion [24,68–71, 75] (sometimes referred to as punting), can resort to light configuration to enable high hops to overcome obstacles and irregular terrain, while staying heavy, would improve the rejection of current disturbance or allow to exert higher forces in manipulation tasks [71].
4.1.2. Hydrodynamic effects
The presence of hydrodynamic forces constitutes another great difference between terrestrial and underwater environments. In general, their effect is to damp the movements and generate forces which depend on the relative velocity and orientation between the fluid and robot figure 4(b). Most of the works presented in this review, accounted for hydrodynamic forces acting on the body and on the legs by including a matrix in the robot's dynamic equations describing the contribution of drag and lift [76–78]. While this methodology is a straightforward extension of the classic dynamic equations used in robotics, in practice, the complex morphology of legged robots, and the continuous motion of legs, make the modelling of hydrodynamic effects a very complex task. Moreover, their integration for control purposes appears computationally demanding. On the other hand, researchers that followed a holistic modelling approach based on extensions of the spring loaded inverted pendulum (SLIP) template [69, 79–81], preferred to use lumped models for hydrodynamic contributions, and just account for a generic and uncertain parameter for drag, enough to predict the amount of energy dissipated during non-contact phases. The developers of CR200 [82] and SILVER2 [83] estimated the drag acting on their ULRs for a set of static poses using fluid-dynamic simulation software. However, estimation of the continuous evolution of hydrodynamic contributions during locomotion has never been reported at the time of writing. Rather than a precise quantification, ULR researchers focused on how to prevent hydrodynamic forces from overturning or dragging the robots away. Three approaches have been pursued in literature so far. The first is based on sensing the intensity and direction of the incoming current and reacting to it, by changing the position and orientation of the body or some control surfaces. This approach, sometimes referred to as rheotactic behaviour, has been observed in crabs and lobsters, and it was implemented on CR200 [74] and on the small hexapod Ariel [84] through body orientation, as well as on RoboLobster [85–87], using claw- and tail-like control surfaces [88]. The second approach instead, explored the possibility of harnessing a morphing body to reduce or increase drag. This concept was demonstrated with a soft robotic prototype with an inflatable body [89] and with a monopedal robot equipped with a deployable body covered by a soft skin [71]. The third approach is passive and aims at increasing the friction with the seabed using microspines [90, 91] or dactyl-like feet inspired by crabs [66].
4.1.3. Interaction with the sediment
The third type of interaction with the environment that ULRs must face is the one with the sediment. Several types of seabed can be found underwater, from rocky to granular and muddy bottoms, and ULRs must be prepared to cope with sinking, slipping, sediment resuspension, or overcoming large obstacles. The interaction between ULRs and the sediment is mediated by the feet, however, notwithstanding the great importance of this subsystem, little attention has been dedicated to this topic (figure 4(d)). Researchers from the Crab Lab of the Case Western Reserve University have recently focused on the use of tapered, curved feet (like crab dactyl shape) paired with a distributed inward gripping method, to allow the amphibious hexapod Sebastian (figure 3(B)) to anchor to the sediment and improve its speed and cost of transport on different kinds of sediment and in the presence of waves [66, 92]. Similarly, even though never demonstrated on ULRs, the use of microspines [91], can yield excellent anchoring properties, especially on rocks. Rocky terrains are arguably the most complex to traverse for benthic vehicles, yet they are usually rich in life and demonstrating stable locomotion on rocky substrate should be a priority for ULRs developers. Beside foot design, also the leg geometry plays an important role in traversing this kind of seabed. In [93], the optimal geometry for a planar leg with two rotational DoFs was investigated for the case of idealized rocky terrain finding that a distal segment of 0.63 of the total length enables to traverse rocks with a diameter that is 37% of the total leg length. Another strategy to traverse irregular terrains consists in adopting punting locomotion [94] (figure 4(c)) which was demonstrated to possess remarkable self-stabilizing properties [69]. Using SILVER2, it was experimentally demonstrated that ULRs employing a punting gait can traverse several kinds of sediment stably and without significantly altering the main locomotion features, and even overcome obstacles up to 20 cm [24]. Moving directly on the seabed can potentially introduce disturbances or damage the environment. Indeed, benthic crawlers have been observed to cause the resuspension of sediment and to compact the ground with their weight, disturbing the proliferation of life if operating outside controlled, predefined pathways [19]. On the other hand, ULRs, with their discrete footholds, present less risk of compacting the ground, and the velocity and intensity of the foot strike on the ground can be modulated through control figure 4(e). Finally, during field trials conducted with SILVER2, very minimal sediment suspension was observed [24].
4.2. Sensing and actuation
The choice of sensors and actuators in the design of ULRs is critical and it depends on the envisioned application and testing/operating depth. Some technologies used on land can be reused, provided adequate waterproofing, some must be adapted to the specificity of the underwater environment, some does not work because of physical limitations, and some can be borrowed from traditional underwater robotics.
4.2.1. Sensing
In terms of sensing, most ULR analysed in this work were equipped with the proprioceptive sensors normally used by their terrestrial counterparts as absolute encoders and torque sensors on the joints, force sensors on feet, and AHRS. These components must be protected from water and pressure and are typically lodged either in motor canisters or within the control electronics. They allowed to implement different gaits and locomotion controllers, including admittance control [95], static gaits to negotiate irregular terrains [96], dynamic punting [24, 97], gaits based on central pattern generators (CPGs) [85], and simple behaviours such as motion and manipulation primitives to simplify the task of the operators. In terms of exteroception, optical cameras were the most used sensors, because of their low price and large amount of literature available. Only CR200 was equipped with sonar devices for its vision system, and the authors demonstrated that artefacts connected with surface reflections could be avoided by changing the orientation of the sensor using the DoFs offered by legs [54]. In any case, vision data only served as feedback for the operator, and it was never processed in real time to implement autonomous operations. The only exceptions are represented by a small hexapod called Ariel [84], for which unfortunately, possibly due to the military nature of the fundings, no details on the implementation are provided, and by SILVER2 to implement a gait transition strategy upon the detection of a target through camera feedback in simulation [98]. Even though sonar technology can solve the problem of low visibility in the underwater environment, in practice the high costs involved cannot always be afforded and this stimulated research in bioinspired sensing techniques. The use of artificial antennae/whiskers to detect obstacles and current sensing have been explored at the Northeastern University on the RoboLobster prototype [85] and further developed in [99] using the MechaLobster robot as a research platform. Another advantage of legged robots consists in harnessing the interaction of legs with the ground to classify the type of terrain. Terrain classification based on the measurement of compliant joint deflection by means of hall effect sensors was demonstrated on the ULR Sebastian [100]. The robot was capable of distinguishing three types of granular media, namely wet sand, dry sand, and pebbles. Such a terrain classification, solely based on proprioceptive sensors and on inexpensive sensing technology can enable terrain adaptive locomotion in ULRs.
4.2.2. Actuation
In terms of actuation, most ULRs in literature employed electric motors with gear reduction and absolute encoders for position control. The waterproofing of electric actuators is a critical part, especially the dynamic sealing on the rotating shaft, and it makes a difference when transitioning from the lab to the field. Very detailed reports on the development of underwater robotic joints were proposed by the developers of CR200 [101] and by those of Aquarobot, a radially symmetric hexapod used for shoreline surveys [102]. Some researchers opted for adding elastic elements in series to the electric actuator implementing a serial elastic actuator (SEA) [24, 68, 70]. Concentrating the compliance of biological legged organisms in specific parts of the legs allows to embody SLIP-like templates [69, 81] in the ULRs and enable self-stabilizing punting locomotion as well as to absorb shocks and protect the motors. A valid alternative to electric actuation is hydraulics, chosen by the developers of the car-sized hexapod Hexaterra [103] and the SCUBA diver inspired Diverbot [65]. Hydraulic actuation guarantees high forces and fast response times, and above all, it is intrinsically waterproof and allows reducing the number of sealed components. A possible reason for the wider diffusion of electric motors is their wider general use and simplicity to retrieve the competences to design and control a mechatronic system based on electric actuation in the short time frames of research projects. In terms of dimensions, ULRs tend to be large and heavy, especially if designed to work at depth. This can be partially explained by their working-class nature, and partially because of the high number of motors and actuation technologies selected. Indeed, hydraulic actuation does not allow significant miniaturisation and the thick canisters designed to withstand high pressures and insulate electric motors neither. Reducing the number of DoFs per leg is a viable solution to scale down the size and complexity of ULRs. This was attempted by resorting to Klann-like mechanisms [99, 104]. However, the adaptability of legged locomotion to different terrains and the decoupling between footholds and body orientation, was lost. Resorting to innovative actuation technologies, compatible with the underwater environment and free from the bulkiness of the traditional ones is an interesting research topic. Soft pneumatic actuators have been tested on a quadruped prototype in a tank [89], however they need an air source and require an increasing amount of air to operate deeper down. Ionic conducting polymer film (ICPF) has been proposed to actuate an eight-legged microrobot designed to work in a father-son system for intervention purposes [105]. Smart memory alloys have been used to actuate the RoboLobster [87] and the two tentacles used for manipulation of the soft OCTOPUS robot [106]. While the lack of rigid parts and bulky actuators are attractive features that may allow reducing the weight of legs and the overall dimensions of ULRs, the capacity of sustaining the weight of larger robots does not appear currently possible.
4.3. Modelling and control
The category of ULRs is very heterogeneous in terms of morphology and size. Prototypes with one [70, 71], two [75], four [68, 72, 89], six [24, 84, 102, 103, 107, 108], and eight legs [87] were developed, and legs with one [99], two [71, 92], three [24, 72, 109], or more [110] DoFs were employed. Naturally, ULRs with a higher number of DoFs are potentially more versatile and several behaviours can be implemented on the same robot. On the other hand, coordinating a high number of DoFs is complex and demands for sophisticated control strategies to solve the problems of locomotion and manipulation.
4.3.1. Locomotion
Among the ULRs hereby presented, we observed a clear preference for hexapod configurations because these exhibit high static stability due to their low CoG and sprawled legs, which guarantee a large support polygon [111]. Developing statically-stable legged robots allowed researchers to solve the locomotion control problem with an approach based on the inverse kinematics, which was followed by most prototypes presented [95, 96, 112–115]. While this approach is very well known and widely adopted in literature, when moving on irregular terrains, adaptation is entirely taken over by control, which should interpret sensory data, plan individual limb positioning accordingly, and provide adequate control signals for each motor. This approach is already very complex in terrestrial legged robotics and becomes even more challenging in the underwater domain, where camera visibility is low and sensing options are limited. To overcome this limitation, the developers of Hexaterra developed static adaptive gaits based on the feedback from contact sensors on feet [96, 113]. On the other hand, the developers of SILVER2 and Diverbot, followed the footsteps of terrestrial legged robotics and took inspiration from the work of Full, Koditschek, Buheler and Raibert to develop ULRs based on the concept of dynamic stability [38, 43, 44, 49, 75, 111]. Dynamic locomotion yields important advantages that can be crucial in field operation. The reason lies in the good self-stabilisation observed both with respect to falling and with respect to keeping the locomotion direction even in presence of terrain irregularities [116]. This property becomes even more significant in a context where terrain mapping is very challenging, if not impossible. The work of Martinez can be regarded as a bridge between terrestrial and underwater dynamic legged locomotion [67, 94, 117]. A comparison of crab locomotion in air and water revealed a novel gait characterised by backward directed pushes and great variability in leg patterns [94]. This gait was called underwater punting and its main features can be predicted by adapting the widely used single legged SLIP model either through reduced gravity or including the contributions of the underwater environment such as drag, lift, buoyancy and added mass [69, 80, 81, 118]. ULRs featuring several DoFs can employ several types of gaits to adapt to different situations. In [107], using the hexapod Sebastian, the differences in terms of speed and cost of transport between sideways and forward walking was investigated, finding that sideways walking is faster and more efficient than forward walking for both hard floors and granular media. The developers of Hexaterra, investigated static gaits to maintain stability on irregular terrains [96], while the developers of SILVER2 proposed an inspection strategy in which the ULR switches from punting to static locomotion upon the detection of a target to approach it safely. The locomotion control problem can also be approached with a close biomimetic approach as in the work of Ayers for the development of the RoboLobster. The control of RoboLobster was based on biomimetic data and recordings of the neural activity of American lobsters and it was implemented through a library of motion primitives based on CPGs [85–87]. The library of motion primitives includes several locomotion modes and body posture adaptation in response to incoming currents. Just like in nature, legs can be used, not only to gain propulsion through the interaction with the ground (walking, running, hopping, punting, etc), but also through the interaction with the water for swimming. The concept of multi-modal locomotion was explored by the developers of CR200 who designed both walking and swimming algorithms [112] to increase the workspace and adaptability of their ULR. Other prototypes, instead of using legs for swimming, were equipped with thrusters to solve the pelagic locomotion problem as in ROVs [65]. This solution allows to resort to the wide literature available on the control of floating underwater vehicles, but it increases the overall number of actuators, and it should be carefully considered in terms of hardware and control complexity. In [119] instead, a walking skid, which can be attached to ROVs when operations under strong current is necessary, is presented. The concept is interesting and potentially impactful, because it may allow faster development of multi-modal robots and re-use of sensors, computers, battery, and in some cases vision and planning from existing pelagic robots. An interesting research trend instead is represented by amphibious robots which are capable to transition from terrestrial legged locomotion to swimming with minimal adaptation to the control strategy. The developers of AQUA [120] and AmphiHex [121] resorted to 1 DoF flexible paddle-like legs to implement dynamic legged locomotion on land and swimming, while in [122] a salamander inspired robot demonstrated the transition from land to water using a CPG based controller. Legged locomotion on the seabed, although apparently straightforward to demonstrate, has never been reported with these platforms and the reduced overall number of DoFs prevents these types of vehicles to individually position their feet or decouple the body orientation from the footholds.
4.3.2. Manipulation
Manipulation tasks on pelagic robots are challenging because the of the complexity of maintain a fixed position while floating. To solve this problem, either through teleoperation or autonomously, one possibility consists in tackling the control of the vehicle and the manipulator altogether in what is called 'floating manipulation problem' [123]. Alternatively, dual arm underwater robots such as Ocean One [26], can use one manipulator to interact with surrounding environment either by anchoring or pushing, and the other to complete the given task. Although dual arm underwater robots cannot be considered legged robots, the complex interactions of their limbs with the environment to assist and complete manipulation tasks have many similarities with ULRs. Indeed, the ability to perform manipulation tasks while keeping a stable and fixed stance, without the need to continuously counteract the disturbance of currents, represents one of the main advantages of ULRs, and consequently, manipulation capabilities have been demonstrated on several of the presented ULRs. One common trend consists in using legs as manipulators. In some cases, additional DoFs are added to enhance the dexterity and add a gripper as in the two front legs of CR200 [110], whose manipulation capabilities were demonstrated during field trials on artefacts specimen [124]. Similarly, the upper limbs of DiverBot [65] featured additional DoFs for enhanced dexterity and so did the front legs of the walking skid presented in [119]. In [104] instead, no additional DoFs were added to the legs of the hexapod Sebastian to demonstrate the retrieval of an object with a leg. A different approach was taken by the developers of SILVER2 who integrated a soft pneumatic manipulator [125], and a cable-driven gripper (figure 1) directly below the robot's chassis to harness a stance control [126] to displace the manipulator. On a smaller scale, gripping capabilities have also been demonstrated on the microrobot presented in [105] which features a two-claws gripper based on ICPF actuators.
4.4. Autonomy and navigation
Most of the ULRs presented in literature were teleoperated. Considering the generally high number of DoFs, ULRs' pilots cannot control individual DoFs, as it often happens with working class ROV, but rather trigger pre-programmed routines corresponding to specific gaits, and positioning or manipulative actions [24, 86]. Innovative approaches to teleoperation were presented in [127] were a sensorized glove was used to specify the leg placement of the ULR Sebastian, and in [65] were the use of a smarsuit was proposed to teleoperate the DiverBot, exploiting its human-like morphology for a more direct mapping. Few works dealt with the implementation of autonomous behaviour either by demonstrating autonomous area inspection in simulation [98], at a conceptual level [84], or confined to laboratories [87]. Looking at the field of terrestrial legged robotics and traditional underwater robotics would allow re-using and adapting sensing strategies and behaviours to readily enhance the performance of ULRs and transform them into autonomous agents. The lessons that can be learned from terrestrial legged robots mostly deal with the negotiation of irregular terrain, either blindly [56] using only proprioceptive sensors, or through a terrain map. On the other hand, traditional underwater robotics and especially AUV and I-AUV can teach ULRs developers about underwater vision systems, and inspection tools such as algorithms for 3D reconstruction and SLAM. The performance of those methods, as claimed by the author themselves [31, 32] are critically affected by the stability of position and the use of benthic vehicles such as ULRs can potentially increase the performance which would in turn improve the reliability of intervention and inspection tasks. Strictly connected to the topic of autonomy there is the one of navigation, and given the scarcity of works on the former, also the latter has not been the object of many research articles. In the underwater domain, the navigation problem has been already solved either with a use of an external positioning system (LBL, SBL or USBL) or just relying on on-board components using optical- or acoustic-based SLAM techniques or by fusing data from INS and DVL like it is done with AUV. The developers of CR200 mentioned the use of an USBL system to retrieve the position of the robot with respect to the operating vessel [124], however no details on the implementation or issues specifically related to the application on a legged robot has been reported. SLAM and other data fusion techniques have never been explored on ULRs; however, they can potentially represent interesting research topics in which the specificities of legged robots play a crucial role. For example, regarding the use of DVLs, being too far from the seabed causes to lose the bottom tracking and instead of measuring the velocity relative to the ground, one will measure the velocity relative to water with consequent errors due to the presence of non-negligible currents. This problem would clearly not be present on vehicles that move on the seabed such as ULRs, but on the contrary the proximity to the ground may cause artefacts leading to a poor estimation of the velocity of the vehicle. Regarding the use of SLAM, techniques based on optical sensors, which typically suffer the low visibility of the underwater environment, can potentially reach good performance thanks to the stability of ULRs and the possibility of getting close to obstacles without the risk of accidental crashes in cluttered environments. On the other hand, being on the seabed, ULR will necessarily have a smaller field of view with respect to AUV. For this reason, following the latest trends in marine robotics, which aim at the deployment of swarms of heterogeneous vehicles [128] it appears promising to develop collaborative missions in which AUVs provide navigation feedback to ULRs performing various types of intervention tasks on the seabed.
4.5. ULRs tested in the field
As already mentioned, the design of ULRs heavily depends on the envisioned application and testing site. Critical aspects for ULRs to work in the field are the waterproofing of actuators and electronics as well as the integration of different kinds of payloads, from acoustic devices for imaging and communication to a diverse range of scientific payloads. In this paragraph, we aim at providing a more thorough description of the three field-tested ULRs (figure 5), reporting technological details on their morphology, payload, intended application, and control (table 2).
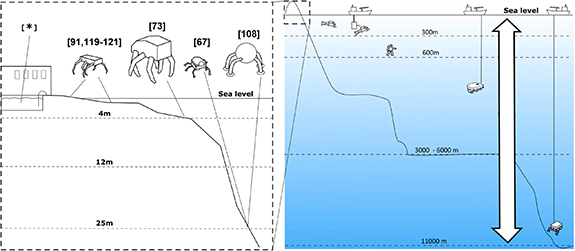
Figure 5. Diagram of operational depth of marine robots. To date, only three ULRs have been tested in the field reaching the maximum depth of 25 m, while others are in the phase of transitioning. CR6000 has probably reached deeper testing sites, but to best of the author's knowledge no literature in English is available.
Download figure:
Standard image High-resolution imageTable 2. Field tested ULRs.
| Aquarobot 2.0 | CR200 | SILVER2 | ||
|---|---|---|---|---|
| Morphology | Legs no. (arrangement) | 6 (radial) | 6 (sym) | 6 (sym) |
| Leg length (cm) (DoFs) | 86 [3] | 209 [4] | 65 [3] | |
| Weight: Dry (Kg)-Underwater (Kg) (Buoyancy (—)) | 80–30 (0.38) | 600–300 (0.5) | 22–2 (0.09) | |
| Body dimension (cm) | 31 × 31 × 40 | 240 × 240 × 130 | 60 × 70 × 35 | |
| Actuation | DC brushed motor with gear reduction | DC brushless motor with gear reduction | Dynamixel smart servomotors with SEA on knee | |
| Sensing | Potentiometer, External total station for positioning | Acoustic camera, scanning sonar, ADCP, CTD, AHRS, USBL, tool sled, optical HD camera, analogue cameras, feet F\T | Absolute encoder, feet contact, attitude heading reference system (AHRS), HD camera, pressure, temperature, leakage, current, and voltage | |
| Level of autonomy | Teleoperated or Autonomous | Teleoperated | Teleoperated | |
| Original intended application | Underwater construction and bathymetry in port areas | General operations in high current environment | Litter collection and microplastic sampling | |
| Modelling and control | Locomotion | Static omnidirectional walking | Static walking, swimming | Static omnidirectional walking, punting |
| Manipulation | No | Yes. The two front legs are manipulators with 6 DoFs | Yes. Tendon driven soft gripper, pneumatic soft arm, sediment samplers | |
| Other behaviours | Follow heading | Hula hop motion for scanning sonar, head alignment scanning sonar, waypoint tracking, rheotaxis | Parallel robot control, sampling primitive, path following, gait transition | |
The first ULR for which field testing have been reported is the hexapod Aquarobot, developed by the Port and Harbour Research Institute in Japan. The envisioned application is underwater construction and bathymetric measurements in port areas [114]. The early version weighted above 900 Kg, which made it complex and expansive to operate, as claimed by the authors themselves [129]. Consequently, Aquarobot was redesigned into a smaller version (Aquarobot 2.0, weighing 70 Kg) capable also of terrestrial locomotion [109]. Both prototypes featured six legs radially arranged around a central cylindrical body and could perform static omnidirectional walking gaits [115]. Several details on the construction, modular leg design and waterproof joints based on brushed DC motors with reduction gear have been reported, together with extensive description of field tests on shoreline survey methods [102]. In particular, the authors harnessed the legged morphology to develop a technique to estimate the seabed roughness according to a combination of pressure data (obtained with a gauge on the foot) and robot kinematics. It is claimed that, in comparison with acoustic surveying from a boat, this method is not affected by long period waves [130], however improvement in acoustic technologies in the last 30 years may require an updated comparison.
The possibility of operating underwater vehicles in a high current environment motivated the development of the Crabster series of robots from the Korean Institute of Ocean Science and Technology. The underlying concept is that using legs, similarly to marine arthropods such as crabs and lobsters, allows modulating the hydrodynamic forces acting on the robot by changing the orientation of the body [74]. In the years from 2011 to 2019, three robots have been developed (CR200, CR6000, and Little Crabster-LCR). However, we will mostly report on CR200 (figure 3(A)) because LCR is a smaller terrestrial version of CR200 used for development and testing, and CR6000 is a depth rated version of CR200 for which no literature in English is available except for details on the design of its tether [131] and on the software architecture, communication and vision system [132, 133]. CR200 is a heavy teleoperated robot with legs symmetrically arranged on the sides of the body. It was developed with a strong focus on its hydrodynamics [82], with dedicated works on legs [76, 134] and body frame [77]. Additionally, a control strategy to adjust the robot pose to improve the stability margins and avoid being overturned by currents was presented [74]. Such rheotactic behaviour is based on a kinematic model of the robot and the feedback on intensity and direction of incoming currents. Brushless DC motors with harmonic drives have been used for actuation [135–137]. In terms of locomotion, CR200 is capable of static walking gaits [138] and swimming [112] with reported trials in a tank [139] and in the field [108]. A waypoint tracking control for the walking mode was also proposed [140]. In the absence of sonar-based positioning systems, the position feedback was based on a kinematic model of the robot. In terms of sensory system and payload, CR200 was equipped with several different devices including DVLs, depth-meter, load cells on feet, force/torque sensor on hips, incremental and absolute encoders on joints. Its vision system is based on optical cameras, multibeam scanning sonar for high resolution short range [141], and single beam scanning sonar for long range [142] imaging. Regarding the use of sonar systems on ULRs, the authors proposed to regulate the orientation of the robot body during image acquisition to reduce artefacts, especially in shallow areas. Finally, field experiments on survey of underwater cultural heritages and manipulation of artefacts replicas have been reported [124, 143].
More recently, a teleoperated hexapod robot SILVER2 (figure 1) was developed at Scuola Superiore Sant'Anna [24], after some years of theoretical and experimental research on underwater limbed locomotion and dynamic stability [68, 69, 71, 144, 145]. SILVER2 is a medium-sized robot, featuring the same leg arrangement of CR200, but significantly smaller and lighter. It was originally developed as a novel tool to collect sunken litter and sample microplastics in the sediment [146], but it can be considered as a general-purpose tool for operations on the seabed. With respect to the previously discussed prototypes, which only rely on static walking gaits, SILVER2 was designed to also perform punting locomotion, a form of underwater hopping gait observed in crabs [94]. To enable such bioinspired gait, consisting of phases of backward directed pushes alternated with phases of ballistic motion, SILVER2 is kept very light underwater, and it integrates torsional SEAs in the knees. Such locomotion strategy enables SILVER2 to compensate ground asperities without a terrain map, solely relying on its natural dynamics. This is particularly useful in field applications because it helps to maintain upright position and heading even on irregular terrains, without explicitly considering the ground to define the feet position. The authors presented a hierarchical control architecture for punting locomotion, which allows simplifying the control of the 18 actuators by modelling the hexapod robot as an equivalent single legged agent [97]. Such control architecture was also extended to three dimensions to implement path following and autonomous area inspection in simulation [98]. SILVER2 has been deployed in several field trials aiming at assessing its capabilities to promote an objective comparison with more traditional underwater vehicles. The acoustic footprint of SILVER2 was observed to be lower than the one of ROVs of similar dimensions [73], and similarly, it exhibited a higher energetic efficiency during station keeping tasks [83]. In terms of manipulation, SILVER2 has been equipped with a soft pneumatic arm to collect several objects [125] and other various end-effectors including sediment samplers and a soft tendon driven gripper. To exploit the advantages of legs in manipulation tasks, a control strategy to optimise the legs position in static configurations was also presented [126]. SILVER2 is actuated with low power electric motors which cannot sustain the robot's weight outside water. Although this represents a limitation and prevents SILVER2 to carry out amphibious operations, this choice allowed to keep the ULR small and easy to be operated by a small crew from a vessel of opportunity.
5. Discussions, open challenges, and opportunities
5.1. Comparison among ULRs and traditional intervention vehicles
Derived from the presented literature, we can compare ULRs and traditional intervention robots according to the seven categories presented in figure 6. Those categories represent a more specific subset of features than the one presented in table 1 and were selected and evaluated based on the statements of the references used in this review. We used an ordinal rating to evaluate the different categories of vehicle. In short range mobility, which is the feature of moving accurately and precisely within an area of 102–104 m2, crawlers and ULRs have unmatched performance due to the intrinsic slow speed, and rejection of disturbances. Moving very close to a structure or an object on the seabed or surveying a small area is a trivial task for these vehicles. On the other hand, for pelagic robots these represent a tougher challenge which requires skilled operators and good current conditions for ROVs, and a more precise positioning control for AUVs. The same goes for station keeping, which is the feature to hold a position to perform an observation or an intervention task. Crawlers and ULRs benefit from the direct interaction with the seabed, which allow rejecting disturbances in a passive way and without energy expenditure whilst forces can be transmitted to the ground. ROVs, in their classical configuration with multi-axis thrusters, show good station keeping stability in decent current condition, but energy expenditure is still significant. AUVs inherently suffer during station keeping, not being designed for such tasks. Redesign and hybrid AUVs (AUVs with multi-axis thrusters configurations) are required to perform effectively the task: however, the category in general performs badly in such tasks. On the other hand, long range mobility, which is the feature of moving within areas larger than 104 m2 or for linear distances greater than 1 km, is better performed by AUVs than any of the other categories. Their design, established navigation and planning algorithms, and efficiency in locomotion are unmatched pros. ROVs, bulky and tethered by design, are simply not an option for long distance locomotion. ULRs, at the current stage of development, are still too inefficient and lacking adequate navigation algorithms to perform well on long distances. Finally, crawlers demonstrated linear motion on hundreds of meters distances and expandable by removing the umbilical connection [147], with good energy consumption and navigation reliability. However, on such ranges they are still far from the speed and dexterity of AUVs, and changes in the terrain might prevent their employment. Control simplicity, which is the features of how advanced the control is required (and inherently which processing power is required on board), is the main point of ROVs. Only low-level controls (e.g. keep forward speed) are generally performed, while main navigation, interpretation, and decisions are made by the operator. In critical conditions (e.g. harsh weather, emergencies, precise interaction, etc) ROVs are still the state of the art for field intervention. Crawlers, thanks to their traditional design and inherited control from terrestrial vehicles, also exhibit a good level of control simplicity. AUVs require additional elements to grant autonomy, the knowledge of the environment, the creation of a map, and the accurate modelling of hydrodynamic phenomena. Their control is very advanced and reliable, but it requires significant control power. Eventually, legged robots are very complex to control by design, they might involve additional layers of low level, and high-level control (e.g. the torque/position of the motors have to be coordinated to generate a gait, which eventually will lead to the high level behaviour of moving forward, turning, etc) and they might need the integration of data from the environment. The success of dynamically stable approaches is based on the capability to move without knowing exactly the environment, but still the control complexity is very high. With similar reasoning, the hardware simplicity is lower for legged robots than for the other vehicles. A field ULR has in general six legs, with three DoFs, and additional actuators for cameras, grippers, etc. The hardware itself is continuously subject to impacts with the ground, and motors need to exert high torques. In general, mechanical research is involved in the creation of ULRs, while Crawlers, AUVs and ROVs follow mechanical designs that have been reliable and established for about 50 years. This is a pivotal characteristic for the field, in an unforgiving environment which can bring to catastrophic failure of the robot or of the mission. Eventually, the forces that such vehicles can potentially exert to the environment vary significantly. ULRs can optimise legs and feet position to maximise the torque of the actuators, and similarly Crawlers can exploit the same feature by increasing the weight, or for some specific direction (e.g. Crawlers can withstand/exert high forces only when they are not reducing the friction on tracks/wheels). ROVs and AUVs must rely on the transfer of energy from the thruster to the water, and the hydrodynamic thrust they can obtain is in general lower than reaction forces that you can obtain from the ground.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 6. Relative performance among the four introduced categories: ULRs, Crawlers, AUVs, and ROVs. From top to bottom: SILVER2, NEPTUNE Benthic crawler (Neptune Canada/CC-BY-SA-3.0) This 'Crawler in Barkley canyon' image has been obtained by the author(s) from the Wikipedia website where it was made available by Nerdondo under a CC BY 3.0 licence. It is included within this article on that basis. It is attributed to Nerdondo. AUV MARUM-SEAL (MARUM/CC-BY-4.0). This 'AUV MARUM-SEAL' image has been obtained by the author(s) from the Wikipedia website where it was made available by NiStMa under a CC BY 4.0 licence. It is included within this article on that basis. It is attributed to NiStMa. Global Explorer ROV (Chris Nicholson/CC-BY-SA-3.0). This 'Global Explorer ROV' image has been obtained by the author(s) from the Wikipedia website where it was made available by Chris Nicholson under a CC BY-SA 3.0 licence. It is included within this article on that basis. It is attributed to Chris Nicholson.
Download figure:
Standard image High-resolution image{kind=link}
5.2. Metrics for objective performance assessment
End-users should select the most suitable platform to perform a specific task based on standardised metrics that objectively assess the performance of available robots. However, given the great differences among underwater robots, such objective assessment is not trivial. This is true when comparing different vehicles belonging to the same class, and it becomes even more complex when comparing two completely different conceptual designs, as for example a ULR and an AUV. Simple metrics from datasheets, such as maximum speed or average power consumption, provide a very precise yet narrow description of the performance of the robot. Recently, thanks to the efforts of engineering societies such as the National Institute of Standards and Technology (NIST) or communities of robotics researchers such as the RoboHub, promoter of the Eurathlon challenge competition, a novel assessment framework is being developed, which consists of a set of standard tasks which are transversal with respect to applications. By looking at the results of underwater robotics competitions [148], it is clear that intervention tasks—i.e. all those tasks in which the robot changes the state of the environment with its actions as sampling, cutting, turning a valve, picking an object—are still far from perfect execution and that teleoperated intervention is still preferred to autonomous. Notwithstanding their great potential, which emerged from the literature review presented in this work, ULRs have never taken part in robotic competitions and to the best of the authors' knowledge no task from those proposed by NIST has ever been attempted. To make the community of end-users and stakeholders aware of such potential, it is of great importance for ULRs developers to participate in the upcoming competitions and challenge themselves in the standard assessment tasks.
5.3. Research opportunities in the field of ULRs
In general, from the analysis of the paper in this review, and our attempt to classify pros and cons of different types of underwater vehicle, we can identify research directions and potential application. As mentioned earlier, research in ULRs is highly multidisciplinary and two main lines can be identified. On one hand, ULRs can be developed to demonstrate advance behaviour or to prove biological hypothesis focusing on bioinspiration, robotics, artificial intelligence, neuroscience and innovative actuation and sensing technologies. On the other, ULRs can be developed as tools for marine operations, capable of enhancing the monitoring, exploration and intervention capabilities of marine scientists. The challenges to develop ULRs is not merely technological, but involves application-driven research in mechanical design, marine engineering, and deep knowledge of the application scenarios. In this framework, ULRs represent both tools for end users with the potential to enable previously unfeasible scientific discoveries, and research platforms to implement the novel discoveries from labs and bring the benefits of a bioinspired approach to the field. Indeed, when operating in the field, as highlighted in figure 6, the weakest points of a specific robotic category can be interpreted as profitable research areas for others. Energy efficiency of locomotion, mechanical design and control algorithms appear to be the aspects to be pushed to increase the applicability of the vehicles. For example, by harvesting compliant elements, searching for different gaits, and optimising fairing shapes, the long-term mobility can be improved without impacting the other features [149]. The mechanical design should aim toward more robust, depth-rated, cheap, and easy to maintain solutions that will eventually lead to a general benefit for the whole underwater domain. Possibly, control algorithms should grant autonomy to ULRs, harnessing existing approaches but also exploring novel concepts as locomotion strategies which deal with complex interaction with the surrounding fluid. Although each category could independently improve, merging the different categories might also lead to an unexpected leap forward of underwater robotics, and seems like a highly rewarding system integration approach which could disrupt underwater operations. Indeed, reconfigurable underwater vehicles are already under exploration for the transition from long range AUVs to I-AUV [150] but to date, only the developers of [65, 119] have attempted to merge pelagic and benthic concepts. The clear complementarity presented in figure 6 (relative features AUVs-Crawlers) is a direct invitation to explore this logically straightforward but technically challenging research. Beside these technical elements related to field applications, underwater legged robotics also hold a great potential as a tool for scientific discoveries or investigation, as for example explaining the morphogenesis [151] or exploring fundamental and bioinspired control strategies [80].
5.4. Applications of ULR in marine science and space exploration
The ULRs presented in this review have been developed for a wide range of different application. Military applications such as mine countermeasure in the surf zone was proposed for both RoboLobster [88] and Ariel [84]. Subsea cable wrenching was envisioned for the hydraulically actuated Hexaterra [103], while CR200 was developed for working under strong current disturbances [74], and SILVER2 for underwater litter collection [146]. Additionally, the unique capabilities demonstrated by ULRs will open notable application scenarios in ecological monitoring and sampling [13]. Ecological monitoring requires time series of continuous and high-frequency data of multidisciplinary typology (i.e. biological, and environmental) [21]. Cabled multiparametric video-platforms allow conveying continuous power and uninterrupted data transmission, making them among the best monitoring options for studies dedicated to ecological multidisciplinary monitoring focusing on species (including commercialised ones), communities and biodiversity changes at different temporal scales [13]. When those assets are connected to locally docked autonomous URLs, a consistent expansion of their spatial sampling capability is enabled, being this monitoring achieved at low sediment/substrate footprint (compared to crawlers) [24] and acoustic signature [73]. The feasibility and efficiency of such an expansion is a central focus for those monitoring actions (feeding new types of data to enable novel conservation actions and management policies of ecosystem services), whose efficacy should be validated by specific pilot actions [15]. Furthermore, the station keeping capabilities of ULRs, which can yield to high precision geo-positioning, would allow direct vertical, high-frequency, and prolonged observation of burrow systems in benthic species of high commercial relevance to conclude on their presence and activity (e.g. Norway lobster can be captured by trawls only when outside the burrows [22]). The presence of robotic manipulators would allow water and sediment sampling around tunnel systems to determine relevant life traits phenomena such as multiple burrow occupancy. The use of optoacoustic cameras would expand the radius for monitoring to avoid the artificial light footprint, potentially altering the animal's behaviour, or damaging their eyes. The development of ULRs has potential to contribute also to space research [16]. The implementation and testing of exo-ocean life detection technologies could be benefitted by new autonomous multiparametric URL platforms designs, capable to move in uncharted terrains and dialoguing with pelagic platforms as carriers. The testing of their functioning could be performed in marine areas currently endowed with flexible monitoring networks of cabled and mobile platforms [16]. Those permanent network of nodes represents operationally controlling areas for URL monitoring of navigation and sensor functionalities performances and testing. URLs would contribute to the creation of solutions for the exploration of inner cap layers or rocky cores of icy moon's exo-oceans (i.e. Europa and Enceladus), hence having space agencies testing those platforms at marine monitoring networks.
6. Conclusions
Just like their terrestrial counterparts, ULRs exhibit versatile multi-terrain locomotion, high stability, and safe interaction with the environment which represent useful capabilities in marine operations. In this work, literature on ULRs has been organized in four main areas of innovation, namely [1] interaction with the underwater environment [2], sensing and actuation [3], modelling and control, and [4] autonomy and navigation. Significant differences were observed between ULRs tested in the field and those tested in labs, reflecting different reasons for investigating ULRs and two main research sub-areas. Experimentation in the lab allows to neglect certain engineering challenges and to focus on bioinspiration, novel actuation and sensing technologies, control strategies and adaptive behaviours. These prototypes are not suitable for the harshness of the underwater environment, but the results obtained with them can transferred to the field either through their technological improvement, or by adapting the methods to 'field-ready' prototypes. ULRs tested in the field instead, present higher development cost related to the depth-rating of components and materials used in construction and tend to rely on established sensing and actuation technologies. They are candidate to be tools for industrial and scientific marine operations and in the future, they will enable previously unfeasible scientific discoveries. Although a direct comparison among ULRs and traditional underwater robots is challenging due to the significant differences in conceptual design, payloads and application, the available data suggest that ULRs perform better than other categories in short range applications in which manipulation and/or close interaction with the environment is demanded and low environmental disturbance is of concern, as for example in ecological monitoring tasks. The importance of marine operations is growing and the ability to efficiently operate underwater is and will be critical in both commercial and scientific sectors. Different underwater environments and tasks are better coped with specialized robots and with this work, in which the challenges and opportunities offered by ULRs are presented, we aim at guiding end-users in the selection of the most appropriate vehicle for their intended task and robotics researchers in the design of machines that will push the operational capabilities of underwater robotics.
Acknowledgment
Certain images in this publication have been obtained by the author(s) from the Wikipedia/Wikimedia website, where they were made available under a Creative Commons licence or stated to be in the public domain. Please see individual figure captions in this publication for details. To the extent that the law allows, IOP Publishing disclaim any liability that any person may suffer as a result of accessing, using or forwarding the image(s). Any reuse rights should be checked and permission should be sought if necessary from Wikipedia/Wikimedia and/or the copyright owner (as appropriate) before using or forwarding the image(s).
Data availability statement
No new data were created or analysed in this study.