
Abstract
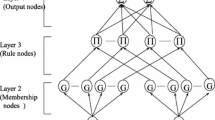
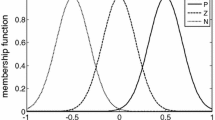
In this paper, a dynamical time-delay neuro-fuzzy controller is proposed for the adaptive control of a flexible manipulator. It is assumed that the robotic manipulator has only joint angle position measurements. A linear observer is used to estimate the robot joint angle velocity. For a perfect tracking control of the robot, the output redefinition approach is used in the adaptive controller design using time-delay neuro-fuzzy networks. The time-delay neuro-fuzzy networks with the rule representation of the TSK type fuzzy system have better learning ability for complex dynamics as compared with existing neural networks. The novel control structure and learning algorithm are given, and a simulation for the trajectory tracking of a flexible manipulator illustrates the control performance of the proposed control approach.
Similar content being viewed by others

References
Horikawa, S., Furahashi, T., and Uchikawa, Y.: On fuzzy modeling using fuzzy neural networks with back-propagation algorithm, IEEE Trans. Neural Networks 3 (September 1992), 801–806.
Juang, C. F. and Lin, C. T.: A recurrent self-organizing neural fuzzy inference network, IEEE Trans. Neural Networks 10(4) (1999), 828–845.
Lee, C. H. and Teng, C. C.: Identification and control of dynamical systems using recurrent fuzzy neural networks, IEEE Trans. Fuzzy Systems 8 (August 2000), 349–366.
Lin, C. T., Juang, C. F., and Huang, J. C.: Temperature control of rapid thermal processing system using adaptive fuzzy network, Fuzzy Sets Systems 103 (1999), 49–65.
Sun, F. C., Sun, Z. Q., and Li, H. X.: Neural-fuzzy adaptive control based on dynamic inversion for robotic manipulators, to appear in Fuzzy Sets Systems.
Sun, F. C., Sun, Z. Q., and Woo, P. Y.: Neural network-based adaptive controller design of robotic manipulators with an observer, IEEE Trans. Neural Networks 12(1) (2001), 54–67.
Sun, F. C., Sun, Z. Q., and Zhu, Y. Y.: Stable neuro-adaptive control for robots with the upper bound estimation on the neural approximation errors, J. Intelligent Robotic Systems 26 (Septenber 1999), 91–100.
Talebi, H. A., Khorasani, K., and Patel, R. V.: Neural network based schemes for flexible-link manipulators simulations and experiments, Neural Networks 11 (1998), 1357–1377.
Waibal, A., Hanazawa, T., Hinton, G., Shikano, K., and Lang, K. J.: Phoneme recognition using time-delay neural networks, IEEE Trans. Acoust. Speech Signal Processing 37 (March 1989), 328–333.
Wang, L. X.: Adaptive Fuzzy Systems and Control, Prentice-Hall, Englewood Cliffs, NJ, 1994.
Yazdizadeh, A., Khorasani, K., and Patel, R. V.: Identification of a two-link flexible manipulator using adaptive time delay neural networks, IEEE Trans. Systems Man Cybernet. 30(1) (2000), 165–172.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Hui, D., Fuchun, S. & Zengqi, S. Observer-Based Adaptive Controller Design of Flexible Manipulators Using Time-Delay Neuro-Fuzzy Networks. Journal of Intelligent and Robotic Systems 34, 453–466 (2002). https://doi.org/10.1023/A:1019629321735
Issue Date:
DOI: https://doi.org/10.1023/A:1019629321735