
Abstract
The work presents a novel magnetostrictive micro-gripper driven by iron–gallium alloy (Galfenol) composite cantilever beam. The design and operation principles of the given micro-gripper are first introduced. Then, we analyze the magnetic distribution and the jaw displacement of the micro-gripper by theoretical simulations. The performance of magnetostrictive micro-gripper has been tested using the multilevel driving strategy to eliminate the vibration. The proposed micro-gripper can grasp micro-target with a maximum gap of 250 μm, and the maximum exciting current of 1 A. The experimental results demonstrate that the proposed micro-gripper has a simple structure and fast response, suitable for micromanipulation and micro-assembly applications.









Similar content being viewed by others

References
Andersen KN, Petersen DH, Carlson K, Mølhave K, Sardan O, Horsewell A, Eichhorn V, Fatikow S, Bøggild P (2009) Multimodal electrothermal silicon microgrippers for nanotube manipulation. IEEE Trans Nanotechnol 8:76–85
Cao QH, Chen DF, Lu QG, Tang G, Yan JW, Zhu ZF, Xu B, Zhao R, Zhang XX (2014) Sensor performance of cantilevered magnetostricitive beam. Int J Smart Sens Intell Syst 7:1222–1238
Cao QH, Chen DF, Lu QG, Tang G, Yan JW, Zhu ZF, Xu B, Zhao R, Zhang XX (2015) Modeling and experiments of a laminated magnetostrictive cantilever beam. Adv Mech Eng 7:1–11
Carlson K, Andersen KN, Eichhorn V, Petersen DH, Mølhave K, Bu IYY, Teo KBK, Milne WI, Fatikow S, Bøggild P (2007) A carbon nanofibre scanning probe assembled using an electrothermal microgripper. Nanotechnology 18:345501–345507
Duenas T, Hsu L, Carman GP (1996) Magnetostrictive composite material systems analytical/experimental. MRS Online Proc Libr 459:527–544
Feng YY, Chen SJ, Hsieh PH, Chu WT (2016) Fabrication of an electro-thermal micro-gripper with elliptical cross-sections using silver-nickel composite ink. Sens Actuators, A 245:106–112
Giouroudi I, Hötzendorfer H, Andrijasevic D, Ferros MW, Brenner W (2006) Design of a microgripping system with visual and force feedback for mems applications. In: The institution of engineering and technology seminar on MEMS sensors and actuators pp 245–249
Guerrero VH, Wetherhold RC (2003) Magnetostrictive bending of cantilever beams and plates. J Appl Phys 94:6659–6666
Kim CJ, Pisano AP, Muller RS (1992) Silicon-processed overhanging microgripper. J Microelectromech Syst 1:31–36
Kohl M, Just E, Fleging WP, Miyazaki S (2000) SMA microgripper with integrated antagonism. Sens Actuators 83:208–213
Na R, Yun GH (2007) Study on the bending properties of magnetostrictive thin film-substrate cantilever system. Sci China E 37:686–692
Na R, Yun GH (2008) The stress and strain Analysis of thin film in the magnetic film-substrate cantilever beam system. Sci China D 38:750–758
Rakotondrabe M, Ivan IA (2011) Development and force/position control of a new hybrid thermo-piezoelectric microgripper dedicated to micromanipulation tasks. IEEE Trans Autom Sci Eng 8:824–834
Solano B, Wood D (2007) Design and testing of a polymeric microgripper for cell manipulation. Microelectron Eng 84:1219–1222
Volland BE, Heerlein H, Rangelow IW (2002) Electrostatically driven microgripper. Microelectron Eng 61–62:1015–1023
Wang FJ, Liang CM, Tian TL, Zhao XY, Zhang D (2015) Design of a piezoelectric actuated microgripper with a three-stage flexure-based amplification. IEEE Trans Mechatron 20:2205–2213
Weetman P, Akhras G (2001) A three dimensional rate equation model for the dynamic sensing effect of magnetostrictive galfenol. J Appl Phys 109:043902.1–043902.6
Zhang R, Chu J, Wang H, Chen Z (2013) A multipurpose electrothermal microgripper for biological micro-manipulation. Microsyst Technol 19:89–97
Zheng XJ, Liu XE (2005) A nonlinear constitutive model for Terfenol-D rods. J Appl Phys 97:1–4
Acknowledgements
This work was supported by University Scientific Research Landing Program (Grant No. KJLD14094), Science & Technology Research Project of Jiangxi Provincial Education Department (Grant No. GJJ161105) and Open Fund of Jiangxi Province Key Laboratory of Precision Drive & Control (Grant No. KFKT201617). We appreciate the language edition from Yuanyang Academic Translation Co., Ltd.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
See Fig. 10.
With
For the convenience of analysis, several dimensionless parameters are defined in (10). Where β, κ are the non-dimensional parameters; ax and ay are the reduced curvature.
The equilibrium state of the system is described by the following equations:
The Rx,Ry,\(\varepsilon_{x}^{0}\), and \(\varepsilon_{y}^{0}\) can be solved by this equations set, and the reduced curvature αx and αy can be expressed as:
with A and B being
Assuming the y-direction deflection is zero, αy= 0, the deflection of cantilever beam can be expressed as:

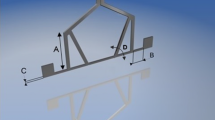
Sketch of a composite cantilever beam. a The coordinate system, where the x–y plane coincides with the mid-plane; b the anticlastic deformation of a magnetized cantilever
Appendix 2
The D–H model is defined as follows:
With the Langevin equation,
The magnetic susceptibility χ can be expressed as:
where k = 1/3χmMs, χm is the initial susceptibility.
Rights and permissions
About this article

Cite this article
Zhao, R., Lu, Q. Design and Experiments of a Galfenol Composite Cantilever Beam-Driven Magnetostrictive Micro-gripper. Iran J Sci Technol Trans Mech Eng 44, 1–10 (2020). https://doi.org/10.1007/s40997-018-0244-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40997-018-0244-z