
Abstract
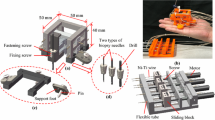
In this study, a new 5-degree of freedom parallel-type robot for neurosurgery is developed and investigated for potential application in deep brain surgery (DBS). The neurosurgical robot consists of the base plate, the moving plate, and three limbs (a PPPU type central limb and two SPS type side limbs) connecting the plates. With an intension to use the developed neurosurgical micro robot with a macro scale robot, the position and kinematic analyses of the macro–micro robot are conducted. A structural analysis under the maximum payload condition is also conducted to confirm its structural rigidity. Then, a macro–micro robot simulator that employs the prototype as a micro robot module is developed to test both its motion capability and its potential application as a stereotactic DBS device. Finally, the absolute position accuracy measurement of the developed micro robot module based on its identified kinematic calibration model verified that its accuracy is comparable to those of existing micro robot module candidates.
Similar content being viewed by others


References
Benabid, A. L., Chabardes, S., Mitrofanis, J., and Pollak, P., “Deep Brain Stimulation of the Subthalamic Nucleus for the Treatment of Parkinson's Disease,” The Lancet Neurology, Vol. 8, No. 1, pp. 67–81, 2009.
Shoham, M., Burman, M., Zehavi, E., Joskowicz, L., Batkilin, E., and Kunicher, Y., “Bone-Mounted Miniature Robot for Surgical Procedures: Concept and Clinical Applications,” IEEE Transactions on Robotics and Automation, Vol. 19, No. 5, pp. 893–901, 2003.
Modrák, V., Paško, J., and Pavlenko, S., “Alternative Solution for a Robotic Stereotactic System,” Journal of Intelligent & Robotic Systems, Vol. 35, No. 2, pp. 193–202, 2002.
Cole, G., Pilitsis, J., and Fischer, G. S., “Design of a Robotic System for MRI-Guided Deep Brain Stimulation Electrode Placement,” Proc. of IEEE International Conference on Robotics and Automation, pp. 4450–4456, 2009.
Heinig, M., Govela, M. F., Gasca, F., Dold, C., Hofmann, U. G., et al., “MARS-Motor Assisted Robotic Stereotaxy System,” Proc. of 5th International IEEE/EMBS Conference on Neural Engineering (NER), pp. 334–337, 2011.
Haidegger, T., Kovacs, L., Fordos, G., Benyo, Z., and Kazanzides, P., “Future Trends in Robotic Neurosurgery,” in: 14th Nordic-Baltic Conference on Biomedical Engineering and Medical Physics, Katashev, A., Dekhtyar, Y., Spigulis, J., (Eds.), Springer, pp. 229–233, 2008.
Karas, C. S. and Chiocca, E. A., “Neurosurgical Robotics: A Review of Brain and Spine Applications,” Journal of Robotic Surgery, Vol. 1, No. 1, pp. 39–43, 2007.
Comparetti, M. D., Vaccarella, A., De Lorenzo, D., Ferrigno, G., and De Momi, E., “Multi-Robotic Approach for Keyhole Neurosurgery: The Robocast Project,” Proc. of SCATh Joint Workshop on New Technologies for Computer/Robot Assisted Surgery, 2011.
Deacon, G., Harwood, A., Holdback, J., Maiwand, D., Pearce, M., et al., “The Pathfinder Image-Guided Surgical Robot,” Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, Vol. 224, No. 5, pp. 691–713, 2010.
Joskowicz, L., Shamir, R., Freiman, M., Shoham, M., Zehavi, E., et al., “Image-Guided System with Miniature Robot for Precise Positioning and Targeting in Keyhole Neurosurgery,” Computer Aided Surgery, Vol. 11, No. 4, pp. 181–193, 2006.
Simon, S. L., Douglas, P., Baltuch, G. H., and Jaggi, J. L., “Error Analysis of MRI and Leksell Stereotactic Frame Target Localization in Deep Brain Stimulation Surgery,” Stereotactic and Functional Neurosurgery, Vol. 83, No. 1, pp. 1–5, 2005.
Starr, P. A., Martin, A. J., Ostrem, J. L., Talke, P., Levesque, N., and Larson, P. S., “Subthalamic Nucleus Deep Brain Stimulator Placement Using High-Field Interventional Magnetic Resonance Imaging and a Skull-Mounted Aiming Device: Technique and Application Accuracy: Clinical Article,” Journal of Neurosurgery, Vol. 112, No. 3, pp. 479–490, 2010.
Li, G., Su, H., Cole, G. A., Shang, W., Harrington, K., et al., “Robotic System for MRI-Guided Stereotactic Neurosurgery,” IEEE Transactions on Biomedical Engineering, Vol. 62, No. 4, pp. 1077–1088, 2015.
Weise, L., Eibach, S., Seifert, V., and Setzer, M., “Intraoperative 3D Fluoroscopy in Stereotactic Surgery,” Acta Neurochirurgica, Vol. 154, No. 5, pp. 815–821, 2012.
Wapler, M., Urban, V., Weisener, T., Stallkamp, J., Dürr, M., and Hiller, A., “A Stewart Platform for Precision Surgery,” Transactions of the Institute of Measurement and Control, Vol. 25, No. 4, pp. 329–334, 2003.
Kim, S. M., Cheong, J., Yi, B. J., and Kim, W. K., “Comparative Study on Kinematic Characteristics of Three Micro-Surgical Mechanisms for Neurosurgical Operations,” Prof. of XX IMEKO World Congress Metrology for Green Growth, 2012.
Luh, J., Walker, M., and Paul, R., “Resolved-Acceleration Control of Mechanical Manipulators,” IEEE Transactions on Automatic Control, Vol. 25, No. 3, pp. 468–474, 1980.
Elatta, A. Y., Gen, L. P., Zhi, F. L., Daoyuan, Y., and Fei, L., “An Overview of Robot Calibration,” Information Technology Journal, Vol. 3, No. 1, pp. 74–78, 2004.
Mooring, B. W., Roth, Z. S., and Driels, M. R., “Fundamentals of Manipulator Calibration,” Wiley New York, 1991.
Chung, J. H., Yi, B.-J., Kim, B., Kim, W. K., Kim, Y. S., and Oh, S. H., “Accuracy Enhancement of a Surgical Robot System Using a Bi-Planar Fluoroscopy,” Proc. of the 39th International Symposium on Robotics, pp. 894–899, 2008.
Nguyen, H.-N., Zhou, J., and Kang, H.-J., “A New Full Pose Measurement Method for Robot Calibration,” Sensors, Vol. 13, No. 7, pp. 9132–9147, 2013.
Rauf, A., Pervez, A., and Ryu, J., “Experimental Results on Kinematic Calibration of Parallel Manipulators Using a Partial Pose Measurement Device,” IEEE Transactions on Robotics, Vol. 22, No. 2, pp. 379–384, 2006.
Daney, D., “Kinematic Calibration of the Gough Platform,” Robotica, Vol. 21, No. 6, pp. 677–690, 2003.
Besnard, S. and Khalil, W., “Identifiable Parameters for Parallel Robots Kinematic Calibration,” Proc. of IEEE International Conference on Robotics and Automation, pp. 2859–2866, 2001.
Korean Standards Associations, “Manipulating Industrial Robots-Performance Criteria and Related Test Methods,” KS B ISO 9283, 2011.
Pierrot, F., Dombre, E., Dégoulange, E., Urbain, L., Caron, P., et al., “Hippocrate: A Safe Robot Arm for Medical Applications with Force Feedback,” Medical Image Analysis, Vol. 3, No. 3, pp. 285–300, 1999.
Li, Q. H., Zamorano, L., Pandya, A., Perez, R., Gong, J., and Diaz, F., “The Application Accuracy of the Neuromate Robot-A Quantitative Comparison with Frameless and Frame-Based Surgical Localization Systems,” Computer Aided Surgery, Vol. 7, No. 2, pp. 90–98, 2002.
Varma, T. R. K. and Eldridge, P., “Use of the Neuromate Stereotactic Robot in a Frameless Mode for Functional Neurosurgery,” The International Journal of Medical Robotics and Computer Assisted Surgery, Vol. 2, No. 2, pp. 107–113, 2006.
Liu, J., Zhang, Y., and Li, Z., “Improving the Positioning Accuracy of a Neurosurgical Robot System,” IEEE/ASME Transactions on Mechatronics, Vol. 12, No. 5, pp. 527–533, 2007.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kim, S.M., Yi, BJ., Chung, JH. et al. Development of a new neurosurgical 5-DOF parallel robot for stereotactic DBS operations. Int. J. Precis. Eng. Manuf. 18, 333–343 (2017). https://doi.org/10.1007/s12541-017-0041-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-017-0041-4