
Abstract
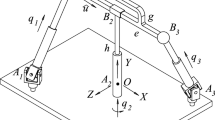
This paper addresses kinematics of a 3 degree-of-freedom (DOF) planar parallel manipulator called Star-Triangle manipulator. The manipulator has good accuracy and a relatively large singularity-free workspace. First, position analysis of the manipulator is implemented indicating that both the inverse and forward position problems of the manipulator have only one solution. Then, velocity and singularity analyses of the manipulator are carried out and its isotropic configurations are identified using two Jacobian matrices. Based on the isotropic conditions, the workspace of manipulator is determined geometrically and it is shown that all points in the workspace are free of singularities. At last, kinematic accuracy of the manipulator is investigated on the workspace through a kinematic conditioning index (KCI).
Similar content being viewed by others

References
D. D. Aradyfio and D. Qiao, Kinematic simulation of novel robotic mechanisms having closed chains, ASME Mechanisms Conference, Paper 85-DET-81 (1985).
G. R. Pennock and D. J. Kassner, Kinematic analysis of a planar eight-bar linkage: application to a platform-type robot, ASME Mechanisms Conference, Paper DE-25 (1990) 37–43.
K. H. Hunt, Structural kinematics of in-parallel-actuated robot arms. ASME J. of Mech., Transmission. And Automation in Design, 105(4) (1983) 705–712.
C. M. Gosselin, J. Sefrioui and M. J. Richard, Polynomial solutions to the direct kinematic problem of planar three degree-of-freedom parallel manipulators, Mechanism and Machine Theory, 27 (1992) 107–119.
C. M. Gosselin and J. P. Merlet, The direct kinematics of planar parallel manipulators: special architectures and number of solutions, Mechanism and Machine Theory, 29 (1994) 1083–1097.
H. R. Mohammadi-Daniali, H. P. Zsombor-Murray and J. Angeles, Singularity analysis of planar parallel manipulators, Mechanism and Machine Theory, 30(5) (1995) 665–678.
F. Firmani and R. P. Podhorodeski, Singularity analysis of planar parallel manipulators based on forward kinematic solutions, Mechanism and Machine Theory, 44 (2009) 1386–1399.
H. R. Mohammadi-Daniali, H. P. Zsombor-Murray and J. Angeles, The kinematics of 3-dof planar and spherical doubletriangular parallel manipulators, In: Computational Kinematics (J. Angeles, G. Hommel and P. Kovacs, eds.) (Kluwer Academic Publishers, Dordecht (1993) 153–164.
T. Seo, W. In and J. Kim, A new planar 3-DOF parallel mechanism with continuous 360-degree rotational capability, Journal of Mechanical Science and Technology, 23 (2009) 3088–3094.
M. Tale Masouleh and C. M. Gosselin, Determination of singularity-free zones in the workspace of planar 3-PRR parallel mechanisms, Journal of Mechanical Design (129) (2007) 649–652.
J. Enferadi and A. Akbarzadeh Tootoonchi, A novel spherical parallel manipulator: forward position problem, singularity analysis, and isotropy design, Robotica, 27 (2009) 663–676.
J. P. Merlet, Jacobian, manipulability, condition number, and accuracy of parallel robots, Journal of Mechanical Design, 128(1) (2006) 199–205.
C. M. Gosselin and J. Angeles, A global performance index for the kinematic optimization of robotic manipulators, Journal of Mechanical Design, 113(3) (1991) 220–226.
Y. Zhao and F. Gao, Dynamic performance comparison of the 8PSS redundant parallel manipulator and its nonredundant counterpart-the 6PSS parallel manipulator, Mechanism and Machine Theory, 44(5) (2009) 991–1008.
C. M. Gosselin and J. Angeles, Singularity analysis of closed-loop kinematic chains, IEEE Transactions on Robotics and Automation, 6(3) (1990) 281–290.
H. R. Mohammadi Daniali, P. J. Zsombor-murray and J. Angeles, The isotropic design of two general classes of planar parallel manipulators, Journal of Robotic Systems, 12(12) (1995) 795–805.
G. Strang, Linear algebra and its application, Academic Press, New York (1976).
J. K. Salisbury and J. Graig, Articulated hands: Force control and kinematic issues, Int. Journal of Robotic. Research, 1(1) (1982) 4–17.
Author information
Authors and Affiliations
Corresponding author
Additional information
This paper was recommended for publication in revised form by Editor Jong Hyeon Park
Soheil Zarkandi received his B.S. and M.S. degrees in Mechanical Engineering from Babol University of Technology, Mazandaran, Babol, Iran, in 2006 and 2009, respectively. His research interests include kinematics of parallel manipula-tors, FEM and Computer aided design (CAD).
Rights and permissions
About this article
Cite this article
Zarkandi, S. Kinematics of a star-triangle planar parallel manipulator. J Mech Sci Technol 25 (Suppl 1), 3223–3230 (2011). https://doi.org/10.1007/s12206-011-0931-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-011-0931-9