
Abstract
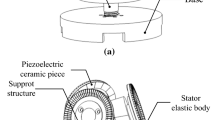
Structure of the octagon-type ultrasonic motor was proposed and designed so as to allow the motor to drive small actuator. The stator of the motor consisted of the octagon shape elastic body and four rectangular plate ceramics. The four ceramics were attached to outer surfaces of the octagon elastic body. The same phase voltages were applied to the ceramics on horizontal surfaces, and 90° phase difference voltages were applied to the ceramics on vertical surfaces. When the AC voltage with 90° phase difference was applied in ceramics, the elliptical displacement of unimorph bars was generated by generating bending vibration. To find the maximum displacement model that generates elliptical displacement at the centers of the inner surfaces, the finite element analysis program ATILA was used. The analyzed results were compared to the experimental results. As a result, the speed and torque are increased linearly by increasing the input voltage and the speed of motors can be controlled by changing the applied voltages.
Similar content being viewed by others

References
SASHIDA T, KENJO T. An introduction to ultrasonic motors [M], Oxford: Clarendon Press, 1993, 17–23.
BABOROWSKI J. Microfabrication of piezoelectric MEMS [J]. Journal of Electroceramics, 2004, 12: 33–51.
UEHA S, TOMIKAWA Y, KUROSAWA M, NAKAMURA N. Ultrasonic motors theory and applications [M]. Oxford, 1993, 4–7.
PARK T G, KIM J, KIM M H, UCHINO K. Characteristics of the first longitudinal-fourth bending mode linear ultrasonic motors [J]. J J A P, 2002, 41: 7139–7143.
UCHINO K. Ferroelectric devices [M]. Marcel Dekker, Inc, 2001, 208.
SEWRARD D. Understanding structures-Analysis, material, design [M]. 2003, 228–231.
ALIK H, JUGHES J R. Finite element method for piezoelectric vibration [J]. International Journal Numerical Methods of Engineering, 2005, 2: 151–157.
CHONG H H, PARK T G, KIM M H. A study on driving characteristics of the cross type ultrasonic rotary motor [J]. J Electroceram, 2005, 17: 2–4.
TOMIKAWA Y, TAKANO T, UMEDA H. Thin rotary and linear ultrasonic motors using a double mode piezoelectric vibrator of the first longitudinal and second bending modes [J]. JJAT, 1992, 31: 3075–3076.
UCHINO K. FEM and micromechatronics with ATILA software [M]. Florida: CRC press, 2008, 245–270.
FUNAKUBO T, TOMIKAWA Y. Characteristics of 10 mm multilayer L1-F2 mode vibrator and application to a linear motor [J]. Jpn J Appl Phys, 2004, 42: 3002–3006.
LIU Rui-bin, CROSS L E. A stackable bonding-free flextensional piezoelectric actuator [J]. Journal of Electroceramics, 2000, 4: 201–206.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: Project supported by the Second Stage of Brain Korea 21 Projects
Rights and permissions
About this article
Cite this article
Kim, JW., Park, CH., Lim, JH. et al. Driving characteristics of octagon-type ultrasonic motor. J. Cent. South Univ. 20, 71–75 (2013). https://doi.org/10.1007/s11771-013-1461-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11771-013-1461-7