
Abstract
Purpose
Laparoscopic surgery has demonstrated various advantages for the patients’ care, but also presents some difficulties for the surgeons, such as kinematic restrictions. Robotic comanipulation, in which control of instruments is shared between the robot and the surgeon, can provide adaptative damping assistance which allows stabilisation of movements. The objective of the present study was to determine the contribution of this assistance on a bimanual laparoscopic task.
Methods
Adaptative damping was studied on Peg Transfer task, performed by eighteen surgery-naive subjects. This exercise was repeated seven times without (Classic repetitions) and seven times with comanipulated robots (Robot repetitions), in a randomised order. We measured task performance, using Peg Transfer score; gesture performance, using hand oscillations and travelled distance; eye-tracking movements as an indicator of emergence of expertise. Participants’ perceived workload was assessed by NASA TLX questionnaire, and difference in impression between the two conditions by UEQ questionnaire.
Results
Adaptative damping improved gesture performance (oscillations F(1,17) = 23.473, p < 0.001, η2 = 0.580), with a statistically significant simple effect on the tool oscillation for both non-dominant (p < 0.001) and dominant hands (p = 0.005), without influencing task performance (mean Peg Transfer score t(17) = 0.920, p = 0.382, d = 0.29), but deteriorating eye-tracking movements associated with emergence of expertise (mean fixation rate per second F(1,17) = 6.318, p = 0.022, η2 = 0.271), at the cost of a high perceived workload (NASA TLX score 59.78/100).
Conclusion
Assistance by adaptative damping applied by comanipulated robots improved gesture performance during a laparoscopic bimanual task, without impacting task’s performance without allowing the emergence of comportments associated with an expertise, and at the cost of a high perceived workload. Further research should investigate this assistance on more precise and clinical tasks performed by professionals.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Laparoscopic surgery consists of millimetre incisions in order to operate the patient, with surgical instruments and camera inserted into the abdomen through trocars, while watching the abdominal cavity on a 2D screen. This type of surgery presents various advantages compared to open surgery, such as decreased postoperative complications and shorter hospital stay [1, 2], and became during the past decades the gold standard in various abdominal interventions.
However, laparoscopic surgery also presents some difficulties, such as kinematic restrictions and lever-effect due to the trocars [3], compromised visuo-motor coordination [4], as well as ergonomic issues for the surgeon. 3D laparoscopy is nowadays available to improve depth perception, but is not yet the standard in operating room in many countries. [5]
Robot-assisted surgery is today well developed, with over than a million interventions performed in 2018 with the telemanipulated Da Vinci robot. However, telemanipulation introduces a new expertise, without a transfer of skill to the classic laparoscopic surgery [6], and as well limits the communication between the surgeon and the operating room team [7].
Apart from telemanipulated robots, another type of robotic-assisted surgery is developed: comanipulation, in which control of instruments is shared between the robot and the surgeon, keeping the surgeon close to the patient. With comanipulation, the surgeon does the same movement as usual, but the robot can bring some help and amelioration of the movement by holding the same instrument. Comanipulation can be applied to tasks requiring human judgement and precise gesture [8], with an easiest installation and a lower expense than telemanipulated robots. Applied to laparoscopic surgery, comanipulated robots do not change the installation of the patients or the trocars, and allow skill transferability [9].
One of the applications of comanipulated robots is the application of a viscous force, which slow the movement but maintain motions stable and precise, mostly used in ophthalmology [10, 11]. Indeed, hand tremor can be an obstacle in performing delicate surgical procedure, such as microsurgery, and applying a viscous force is one way to tremor filtering [8]. In laparoscopic surgery, viscous force could ensure safety and accuracy in precise procedures, but unlike in microsurgery, distance to cover is relatively long and slowing down larger movements can lead to fatigue and increased operative time.
Previous work proposed to utilise variable viscosity according to velocity [12]. This adaptative damping algorithm allows realising fast movements without applying viscous field, but when the motion is slower the robot generate a large viscous force to stabilise the hand movement. Similar damping has shown its benefits with comanipulation robots in other tasks than surgical ones [13, 14].
Results of this previous work [12] suggest that adaptative damping decrease hand tremor and realisation time of point-by-point trajectories in direct manipulation, with an improvement of trajectories, especially long trajectories, as well as in laparoscopy. In laparoscopy, viscous field seems to be more comfortable when applied in the tip of the laparoscopic instrument for small depth, and on the handle of the instrument for deeper movements.
However, those first results were made on simple tasks, far from clinical context, and on only one hand.
To get closer to a clinical context, the first step is to propose a bimanual task, as surgeons always use both hands to operate. Some exercises are specially made to train and evaluate ambidexterity, such as Peg Transfer [15]. To analyse a bimanual task, motion analysis has demonstrated to be a useful assessment of laparoscopic dexterity [16], and use of eye tracking is well known to evaluate expertise in laparoscopy [17] as experts tend to maintain their eye gaze on a target while novices will look back and forth from the target to their instrument to guide their motion. Robotic assistance in laparoscopic surgery has shown in previous work its impact on acquisition of expertise and amelioration of hand–eye coordination, studied by eye tracking [18].
Therefore, the present study aimed to assess the impact of variable viscosity field on a bimanual task in laparoscopic surgery, by analysing the effect of variable viscosity on task performance, gesture performance, and comportments associated to the emergence of an expertise, during a task that is made to evaluate bimanuality.
Methods
Participants
Eighteen participants, four women and fourteen men, without any experience in laparoscopic surgery were recruited. Three are left-handed. Participants were aged from 20 to 64 years at the time of the experiment, with a median age of 25 years. Among them, eight (44.4%) were daily users of computer video games, and five others (27.8%) had a manual job. All participants realised the same task (Fig. 1). All participants had an information letter and signed a written consent. All procedures are in accordance with ethical standard of the institutional board and with Helsinki declaration.

Summary of protocol, apparatus and methods
Material
-
Two set ups were used for this protocol: one without and one with comanipulated robots. These set-ups are illustrated in Fig. 2: Classic repetition set-up: it includes a laparoscopy training set-up (LaparoAnalytic) with one grasper for the left hand and one dissector for the right hand, and with a 2D screen above it displaying the working space. The set-up camera did not move during the task. The graspers and trocars are provided with movement’s sensors.
-
Robot repetition set-up: the same pelvi-trainer set-up is used, with a 2D screen, and with two robotic arms in addition, each holding the grasper and dissector for left and right arm, respectively, and placed on each side of the pelvi-trainer.

Protocol set-up. a Represent the Classic set-up, and b the Robot set-up
The comanipulator used is a robotic arm designed on a technological basis from Haption 3D robots (https://www.haption.com/fr/products-fr/virtuose-3d-fr.html). It is composed of six articulated joints: the first three are actively controlled, composing the “shoulder” and “elbow”, and three distal constitute a free spherical wrist, rotation of which follows the rotation of the instrument. Instruments are attached to the robot by a magnet. All joints are equipped with position sensors.
In addition to providing artificial forces, the measures provided in real time by the robot are as follows:
• Orientation of the instrument axis and positions of any point belonging to the instrument with respect to the frame attached to the fixed robot base
• The output of the robot is a force exerted at point P in real time (see Fig. 3).

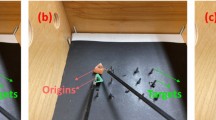
Representation of the robotic arm and its kinematics. Point H represents the handle, Point T the tip of the instrument, Point P is the point where the robot holds the instrument
Algorithms implemented in these robotic arms are:
-
(1)
Gravity compensation and the associated trocar detection needed to its implementation, described before by our team in [19].
-
(2)
Adaptative damping algorithm, proportional to velocity [12]: as described above, the robot sensors can measure position and velocity of point P, and a force f can be exerted at point P. The following controller achieves programming a viscosity:
$$f=-b.y$$
We propose in addition to make the viscosity b depending on the norm of the velocity:
where bmax is the maximal value of the viscosity and 0 ≤ λ ≤ 1.
More precisely, two thresholds, vmin and vmax, are defined, with 0 < vmin < vmax, and λ is computed by linear interpolation between its maximal value 1 and its minimal value bmin/bmax:
In order to avoid stick–slip motions (see Lin Dong thesis), a first-order low-pass filter is applied to the viscosity coefficient.
The viscosity parameters bmin, bmax, vmin and vmax were determined empirically in advance in order to be assistive but felt comfortable.
Procedure
Participants performed one exercise, with fourteen repetitions. Before the beginning of the session, a randomisation determined whether the task was performed with or without robotic help for each repetition (for example: with robot-without robot-without robot-with robot etc.), so that seven repetitions were performed without robotic help (Classic repetitions) and seven with robotic help (Robot repetitions) (Fig. 1).
Participants had to realise the same exercise with seven Classic repetitions and seven Robot repetitions, as the whole session was composed of 14 exercises, with a total duration of two hours. The chosen exercise was the Peg Transfer, defined by the Fundamentals of Laparoscopic Surgery protocol [20]. Before the beginning of the repetitions, participants had two minutes to familiarise with the set-up and instruments on another exercise (Marbles). Between repetitions, a pause was proposed to the participants, and a pause was imposed at mid-session.
Peg Transfer protocol: six pegs are disposed on the left side of a pegboard. The participant had to take a peg with his left hand, transfer it mid-air from the left to the right hand, and put the peg on the right side of the pegboard with his right hand. Once the six pegs were placed on the right side, the participant had to do the same manoeuvre from right to left, by taking a peg with the right hand, transferred it from the right to the left hand and put the peg on the left side of the board. No order was defined to take the pegs. All transfers had to be done on a good height, without the help of the board. This procedure is illustrated in Fig. 4.

Peg Transfer Procedure. The present figure shows one example of a left—to—right movement. The first image is the set-up at the beginning of the exercise. The participant grabs a peg with his left hand on the second and third image. On the fourth image, the participant transfers the peg from his left to his right hand. The fifth image shows the drop of the peg with his right hand. This movement is repeated for all the pegs from left to right, and then from right to left
A penalty was counted each time a peg dropped outside of the pegboard, or if it dropped into the pegboard but the participant could not reach it. One penalty corresponds to 10 points. The penalty was counted into the Peg Transfer score, as described below.
Maximal time to realise the exercise was 300 s. The time count begun at the moment the first peg is touched, and ended when the last peg is released. Participants were told to realise the exercise as fast as possible, without penalty.
The Peg Transfer is an exercise use in laparoscopic training to evaluate hand–eye coordination, depth perception, and ambidexterity [15]. Peg Transfer repetition is also used to evaluate novices, because it does not require technical surgical skills but is adequate to differentiate novices from experts [21].
Measures
To investigate the impact of damping on this bimanual task, we analysed task performance, gesture performance, acquisition of expertise, workload and the difference of impression between Classic and Robot repetitions.
-
Task performance: to measure task performance, we used Peg Transfer scores:
-
Time to realise the exercise and penalty score (= 10 × number of dropped peg)
-
Overall score = maximal time accorded (300 s) – time to realise the exercise – penalty score
-
Corrected time, calculated according to the number of successful transfers, to determine the time that the participant would have taken to finish the exercise when he could not; calculated as followed:
Corrected time = time to realise the exercise x (12/number of successful transfers).
-
Gesture performance: to measure gesture performance, we used the laparoscopy simulator LAPARO Analytic© (https://laparosimulators.com/analytic/), which is using the movement’s sensors on instruments and trocars to calculate different parameters, for each hand individually:
-
Travelled distance by the tip of the instrument, in meters
-
Hand oscillations (score with no specific units)
-
Percentage of visibility of the instrument, calculated by a monitoring algorithm of the camera’s image
-
-
Emergence of an Expertise: we used an eye-tracking device to analyse the emergence of expert movement during the session, as experts tend to maintain eye gaze in the target while manipulating the instruments [22]. Two moments were chosen to define targets: the Grab phase, where the instrument is reaching the target which is the peg that it will catch, and the Transfer/Drop phase, were the peg is transferred between the two hands before being dropped on the target. Examples of targets for the first peg taken are represented in Fig. 5. Measures used were the number of fixations on the target before reaching it (a low number of fixations shows the maintenance of the gaze on the target), duration of fixations (which tend to lengthen when there is less back and forth from the tip of the instrument to the target), and fixation rate per second [17, 23]. Gaze data were recorded with a Tobii© screen-based eye tracker, with a sampling rate of 120 Hz. Data analysis was performed with Tobii Pro Lab©.
-
Workload: results obtained at the NASA TLX questionnaire allowed analysing self-perception of comfort during the exercise. It is a subjective multidimensional tool measuring workload during a task realised with a human-machine system [24]. It is based on six subscales: mental demand, physical demand, temporal demand, performance, effort and frustration. The questionnaire was given to the participants at the end of the whole session, and was filled only to assess Robot repetitions.
-
Difference of impressions between Classic and Robot repetitions: UEQ questionnaire was used to compare feelings of the participants when they did the exercise with or without the robotic arms. This questionnaire is validated to compare two products or experiences according to their utilisation (efficiency, perspicuity, dependability) and the impression of the user (originality, stimulation, attractiveness) [25, 26]. Two identical questionnaires were sent to the participant after their session, one to determine their feeling during Classic and one for Robot repetitions, and results were compared between the two questionnaires.

Eye-tracking targets during the Peg Transfer exercise. The yellow circles represent targets where fixations are counted during the interest phases. The purple area represents the areas where the gaze can move back and forth during the interest phases, without fixations being counted. During the Grab phase, where the hand will grab the peg before it touches it, the target is the peg before it is grabbed. In the Transfer/Drop phase, in which the participant transfers the peg between his two hands and then places it down, the target is the peg on which the peg will be placed before it is dropped down
COVID-19 related procedures
Wearing a mask covering nose and mouth was mandatory during the whole session for participant and examiner. A minimal distancing of two meters was respected at all times. Each participant had to wash his hands with hydro-alcoholic gel before beginning the session. Between two participants, instruments and the whole set-up were disinfected and the room was ventilated.
Statistical analysis
The data recorded to appreciate the task performance were used to conducted inferential statistical analysis. For each metric, we analysed the effect of the robot use presenting two levels (Classic, Robot) using paired t tests.
For each metric of gesture performance, data were compared using a two-way repeated measures ANOVA to analyse the effects of robot assistance with two levels (Classic, Robot), and the hand characteristics also including two levels (dominant, non-dominant).
For each metric of the emergence of expertise, data were compared using a two-way repeated measures ANOVA to analyse the effects of robot assistance with two levels (Classic, Robot) and grab/drop phase also with two levels (grab, drop).
For all metrics, we checked the normality of the data before the statistical analyses if it was not respected, we used a logarithmic transformation to ensure the normality of the data. Statistical significance was set to 0.05. Data were analysed with SPSS software.
For the UEQ questionnaire’s measures, data were compared between the seven Classic repetitions and seven Robot repetitions, using Welch’s T test. All results are presented in mean ± SD. A p value of less than 0.05 was considered as statistically significant.
Results
Task performance
A paired-samples t test was conducted to compare mean Peg Transfer score, mean time of realisation and mean corrected time in Classic and Robot conditions. A logarithmic transformation has been applied to meet the normality hypothesis for Peg Transfer score and time of realisation.
There was no significant difference in the Peg Transfer scores for Classic (M = 32.1, SD = 54.1) and Robot (M = 26.6, SD = 48.2) conditions (t(17) = 0.920, p = 0.382, d = 0.29). There was also no significant difference in the scores for Classic (M = 263, SD = 52.5 s) and Robot (M = 263, SD = 1.14 s) conditions (t(17) = – 1.175, p = 0.256, d = – 0.28). There was no significant difference regarding mean corrected time for Classic (M = 434, SD = 351 s) and Robot (M = 463, SD = 503 s) conditions (t(17) = – 0.231, p = 0.820, d =−0.05).
Gesture performance
Gesture performance results are represented in Fig. 6.

Results of two-way ANOVA for gesture performance. a For mean travelled distance (mm), b For mean oscillations, c for visibility of instruments (%)
A repeated measures two-way ANOVA was performed to analyse the effect of adding robot assistance and using dominant/non-dominant hand on the total distance travelled by the tool tip. It revealed that there was a statistically significant interaction between the effects of adding the robot assistance and the studied hand (F(1,17) = 9.069, p = 0.008, η2 = 0.348). The main effects were not significant, with F(1,17) = 0.426, p = 0.522, η2 = 0.024 for the robot and F(1,17) = 0.082, p = 0.777, η2 = 0.005 for the hand. Simple effects analysis showed that for each analysed hand, adding assistance from the robot did not have a statistically significant effect on travelled distance by tooltip (p = 0.096 and p = 0.545, respectively, for non-dominant and dominant hands). Simple effects analysis showed that for each robot condition (with and without), changing the analysed hand did not have a statistically significant effect on travelled distance by tooltip (p = 0.098 and p = 0.089).
A repeated measures two-way ANOVA was performed to analyse the effect of adding robot assistance and using dominant/non-dominant hands on the oscillation of the hand. The analysis showed a significant effect of the robot use (F(1,17) = 23.473, p < 0.001, η2 = 0.580), and a non-significant effect of the analysed hand (F(1,17) = 2.303, p = 0.147, η2 = 0.119). It also revealed a statistically significant interaction between the robot assistance and the analysed hand (F(1,17) = 8.037, p = 0.011, η2 = 0.321). Simple effects analysis showed that for each analysed hand, adding assistance from the robot has a statistically significant effect on the tool oscillation for both levels of the hand dominance factor (p < 0.001 and p = 0.005, respectively, for non-dominant and dominant hands). The robot use is indeed a significant main effect. Simple effects analysis showed that with robot there is no statistically significant effect (p = 0.804) between hands, but there is one without robot (p = 0.015).
A repeated measures two-way ANOVA was performed to analyse the effect of adding robot assistance and using dominant/non-dominant hand on the visibility of the instrument. The results showed a significant main effect of the robot use (F(1,17) = 9.547, p = 0.007, η2 = 0.360): a non-statistical significance of the hand dominance (F(1,17) = 3.994, p = 0.062, η2 = 0.190), and no interaction effect (F(1,17) = 0.502, p = 0.488, η2 = 0.029).
Emergence of an ex1pertise: Eye-tracking
Eye-tracking results are represented in Fig. 7.

Results of two-way ANOVA for Emergence of Expertise. a For mean duration of fixations (sec), b For mean number of fixations, c For mean fixation rate
A repeated measures two-way ANOVA was performed to analyse the effect of adding robot assistance and Peg Transfer phase on the mean duration of fixation. The analysis showed a significant effect of the robot use (F(1,17) = 5.162, p = 0.036, η2 = 0.233) and a significant effect of the Peg Transfer phase (F(1,17) = 7.536, p = 0.014, η2 = 0.307). It also revealed a statistically significant interaction between the robot assistance and the phase (F(1,17) = 6.256, p = 0.023, η2 = 0.269). Simple effects analysis showed that adding assistance from the robot have a statistically significant effect only during the drop phase (p = 0.021) and not during the Grab phase (p = 0.675). Simple effects analysis showed that without robot assistance the phase has a statistically significant effect on mean duration of fixations (p = 0.007), but the effect is not statistically significant with robot assistance (p = 0.078).
A repeated measures two-way ANOVA was performed to analyse the effect of adding robot assistance and Peg Transfer phase on the mean number of fixations. The results showed a significant main effect of the phase (F(1,17) = 20.342, p < 0.001, η2 = 0.545): a non-statistical significance of the robot assistance (F(1,17) = 1.690, p = 0.211, η2 = 0.09), and no interaction effect (F(1,17) = 0.094, p = 0.763, η2 = 0.006).
A repeated measures two-way ANOVA was performed to analyse the effect of adding robot assistance and Peg Transfer phase on the mean fixation rate. There was a significant main effect of the robot (F(1,17) = 6.318, p = 0.022, η2 = 0.271): a non-statistical significance of the phase (F(1,17) = 1.014, p = 0.328, η2 = 0.056), and no interaction effect (F(1,17) = 1.432, p = 0.248, η2 = 0.078).
Questionnaires
Over all participants, the mean score at NASA TLX questionnaire is of 59.78/100. This represented a high perceived workload [27].
Results of the UEQ comparing Classic and Robot repetitions showed no significant difference between Robot regarding attractiveness (1.18 ± 0.99 vs. 0.83 ± 0.99, p = 0.31), perspicuity (1.31 ± 1.03 vs. 0.78 ± 1.07 p = 0.14), efficiency (0.99 ± 0.79 vs. 0.56 ± 1.15 p = 0.20), dependability (0.76 ± 0.8 vs. 0.67 ± 1.13, p = 0.77), and stimulation (1.19 ± 1.16 VS 1.47 ± 0.95, p = 0.44). However, novelty (0.29 ± 1.47 vs. 1.88 ± 1.01, p = 0.0007) was significantly higher in Robot repetitions. Those results of UEQ questionnaires are represented in Fig. 8.

Results of UEQ questionnaire
Discussion
The present study assessed the impact of comanipulated robotic assistance with adaptative damping algorithm on a bimanual task in laparoscopic simulation. The results suggest that adaptative damping improves gesture’s performance, with a significant diminution of hand oscillations on both dominant and non-dominant hands, but did not impact task’s realisation or emergence of an expertise. Moreover, subjective perception of workload was high according to NASA TLX, but robotic help appeared as more modern than Classic approach without influencing efficiency or perspicuity.
In surgical context, damping has shown its benefits in microsurgery by tremor filtering [8, 28] but have not been experienced in other fields of surgery. To our best knowledge, only our team have worked on adaptative damping for laparoscopic tasks.
It has been shown in two studies that damping had a positive effect on tremor filtration and on precision for point-to-point trajectories [12, 18]. The second study [18] concluded on an improvement of task’s performance with damping, but without significant difference, due probably to a lack of power because this question was not the main research question of this study.
Gesture analysis has been demonstrated as an objective reflection of operative ability, in simulation as well as in clinical situations [16]. In the present study, gestures amelioration by adaptative viscous force was expected, as the first application of this algorithm is tremor filtration. The present study confirms this role in bimanual laparoscopic simulation with an amelioration of gesture performance of both hands. Also, it was expected that the gesture amelioration could be more efficient on the non-dominant hand, as it is the less precise hand, and this hypothesis has been confirmed by this protocol, with the loss of statistical difference regarding hand oscillations between the two hands when adding the robotic assistance (Fig. 6b), while non-dominant hand had significantly more oscillations than the dominant hand in the Classic set-up.
However, contrary to what was expected, the task realisation was not ameliorated by adaptative damping. It has been shown that Peg Transfer is a good exercise to assess objectively laparoscopic technical skills, in terms of efficiency and precision [20]. As well, Peg Transfer is a good exercise to evaluate both hands individually and symmetrically, and so represent well a bimanual task. However, one hypothesis that can explain this result is the simplicity of the task and the lack of precise motions needed to complete it, which did not allow demonstrating the use of damping in this task particularly. Further research with more precise and complex tasks should be considered.
Interestingly, it has been shown in this study that gesture is improved, but the task realisation is not. However, it should be noted that the task is not deteriorated and moreover that the time of realisation is not increased. One of the criticisms about telemanipulation, which is nowadays the most common type of robotic assistance in laparoscopic surgery, is the increased operative time compared to classic laparoscopic surgery [28]. Here, comanipulation with adaptative damping algorithm permitted an amelioration of gesture with no longer time of realisation, or difference in terms of performance of the task. Moreover, telemanipulation tends to lengthen preoperative time, due to the installation of the robotic arms [29, 30]. Comanipulated device, as shown in this protocol, is easily installed and connected to the laparoscopic instruments with the help of magnets, and can be connected or disconnected easily whenever needed.
The negative result regarding eye-tracking measuring, reflecting emergence of an expertise, was less expected. Previous work showed a trend (but not significant) towards improved hand–eye coordination and reduce eye fixation rate per second, reflecting a faster emergence of expertise, with this type of robotic assistance in a laparoscopic exercise [18]. In the present study, this result is even weaker, as no trend seems to appear. Our participants were all novices and had no experience of laparoscopic surgery. Also, the Peg Transfer’s learning curve is known in the literature, showing that novices need to perform an average of 57 repetitions to reach an expert level [31]. The number of repetitions in this protocol may not have been sufficient to show the emergence of an expertise in novices, but we were unable to increase this number due to the already long duration of the session. This could explain the difference of results with the previous study, which included three sessions of exercises to analyse task’s learning.
Moreover, the results showed a significant deterioration of the mean duration of fixations, as well as the mean visibility of the instruments. As our participants were novices, already discovering laparoscopy, adding another factor as the robotic assistance could complexify the acquisition of expertise, and disturb the participants. Another hypothesis is that participants rely on the robotic assistance to have better results, which could unveil less accurate movements and comportments.
A specificity of this study was to evaluate self-perceived workload during the robotic-assisted exercises, which was high, indicating a lack of comfort for the participants. However, the participants were naive subjects. Laparoscopic surgery is a particular effort, being standing for a long time and discovering new motions and visualisations in laparoscopy can quickly lead to fatigue [32]. The duration of the 14-exercise session was approximately two hours, so it is not surprising that the workload was perceived to be high, even though rest periods between exercises were imposed. The perceived workload could have been due to the discovery of this surgery and its constraints. Nevertheless, the UEQ questionnaires revealed that there was no significant difference between the Classic and Robotic repetitions in terms of perceived efficiency and controllability. It is important to investigate this result in further studies to know if this perceived workload is due to the task itself, the discovery of laparoscopy or the robotic assistance. Perceived comfort and ergonomic are described as one of the strengths of telemanipulated robotic assistance compared to classic laparoscopic approach [33, 34]. The present protocol raises the question of compromise between gesture performance and comfort perception, as gesture is significantly improved by damping, but with a high perceived workload. Feedback on the perceived workload during the use of comanipulated robotic arms by people used to the effort of laparoscopy is therefore necessary in further research.
This study has several limitations. First, choice of novices does not allow determining the use of this assistance for surgeons, but it limits the potential bias of different level of skills between residents in different years of residency and experts. Also, unfortunately, only four on 18 participants were female, which is not representative of today’s representation of genders in the surgical environment. Furthermore, this study is a first step to assess the impact of comanipulated assistance on bimanual tasks. The task chosen, Peg Transfer, has no need of real precise movements, and as a consequence is maybe not adapted to demonstrate the impact of adaptative damping algorithm in laparoscopic surgery. Further researches are needed with more precise clinical tasks to determine the real-life impact of viscous force in comanipulated robotic-assisted laparoscopic surgery, and also with young and senior surgeons to study this contribution to professionals and the impact of experience on flexibility in this assistance use. Also, further research should investigate the perception of comanipulated robots and adaptative damping by professional used to laparoscopy, to have their feedback on this device and its potential use in operating rooms.
In conclusion, the present study assessed the impact of comanipulated robotic assistance with adaptative damping algorithm on a simple bimanual task in laparoscopic training performed by novices. This assistance improved gesture performance, without impacting task’s performance, without allowing the emergence of comportments associated with an expertise, at the cost of a high workload. This study raises the questions of the task’s choice, which should be more realistic and complex in future protocols to study the clinical impact of this robotic assistance. It also unveils the limits of the choice of naive participants. Further research should be conducted with professionals, used to laparoscopic surgery, and therefore more able to be confronted to a new technology, while performing a more precise task.
References
van der Pas MH, Haglind E, Cuesta MA, Fürst A, Lacy AM, Hop WC, Bonjer HJ, COlorectal cancer Laparoscopic or Open Resection II (COLOR II) Study Group (2013) Laparoscopic versus open surgery for rectal cancer (COLOR II): short-term outcomes of a randomised, phase 3 trial. Lancet Oncol 14:210–218. https://doi.org/10.1016/S1470-2045(13)70016-0
Zhang X-L, Liu R-F, Zhang D, Zhang Y-S, Wang T (2017) Laparoscopic versus open liver resection for colorectal liver metastases: A systematic review and meta-analysis of studies with propensity score-based analysis. Int J Surg 44:191–203. https://doi.org/10.1016/j.ijsu.2017.05.073
Sutter C, Sülzenbrück S, Rieger M, Müsseler J (2013) Limitations of distal effect anticipation when using tools. New Ideas Psychol 31:247–257. https://doi.org/10.1016/j.newideapsych.2012.12.001
Dharia SP, Falcone T (2005) Robotics in reproductive medicine. Fertil Steril 84:1–11. https://doi.org/10.1016/j.fertnstert.2005.02.015
Bertolo R, Checcucci E, Amparore D, Autorino R, Breda A, Ramirez-Backhaus M, Dasgupta P, Fiori C, Rassweiler J, Liatsikos E, Porpiglia F (2018) Current status of three-dimensional laparoscopy in urology: an ESUT systematic review and cumulative analysis. J Endourol 32(11):1021–1027. https://doi.org/10.1089/end.2018.0374
Blavier A, Gaudissart Q, Cadière G-B, Nyssen A-S (2007) Perceptual and instrumental impacts of robotic laparoscopy on surgical performance. Surg Endosc 21:1875–1882. https://doi.org/10.1007/s00464-007-9342-5
Avellino I, Bailly G, Canlorbe G, Belgihti J, Morel G, Vitrani M-A (2019) Impacts of Telemanipulation in Robotic Assisted Surgery. In: Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems. Association for Computing Machinery, New York, NY, USA, pp 1–15
Taylor R, Jensen P, Withcomb L, Barnes A, Kumar R, Stoianovici D, Gupta P, Wang Z, Dejuan E, Kavoussi L (1999) A steady-hand robotic system for microsurgical augmentation. Int J Robot Res. https://doi.org/10.1177/02783649922067807
Troccaz J (2013) Medical Robotics. Wiley
Gijbels A, Vander Poorten EB, Gorissen B, Devreker A, Stalmans P, Reynaerts D (2014) Experimental Validation of a Robotic Comanipulation and Telemanipulation System for Retinal Surgery. In: 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics. pp 144–150
Roizenblatt M, Grupenmacher AT, Belfort Junior R, Maia M, Gehlbach PL (2019) Robot-assisted tremor control for performance enhancement of retinal microsurgeons. Br J Ophthalmol 103:1195–1200. https://doi.org/10.1136/bjophthalmol-2018-313318
Dong L (2017) Assistance to laparoscopic surgery through comanipulation. These de doctorat
Erden MS, Marić B (2011) Assisting manual welding with robot. Robot Computer-Integr Manuf 27:818–828. https://doi.org/10.1016/j.rcim.2011.01.003
Tsumugiwa T, Yokogawa R, Hara K (2002) Variable impedance control based on estimation of human arm stiffness for human-robot cooperative calligraphic task. In: Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292). pp 644–650 vol.1
Derossis AM, Fried GM, Abrahamowicz M, Sigman HH, Barkun JS, Meakins JL (1998) Development of a model for training and evaluation of laparoscopic skills 11this work was supported by an educational grant from united states surgical corporation (auto suture Canada). Am J Surgery 175:482–487. https://doi.org/10.1016/S0002-9610(98)00080-4
Smith SGT, Torkington J, Brown TJ, Taffinder NJ, Darzi A (2002) Motion analysis. Surg Endosc 16:640–645. https://doi.org/10.1007/s004640080081
Wilson M, McGrath J, Vine S, Brewer J, Defriend D, Masters R (2010) Psychomotor control in a virtual laparoscopic surgery training environment: gaze control parameters differentiate novices from experts. Surg Endosc 24:2458–2464. https://doi.org/10.1007/s00464-010-0986-1
Ferrier-Barbut E, Gauthier P, Luengo V, Canlorbe G, Vitrani M-A (2018) Measuring the quality of learning in a human-robot collaboration: a study of laparoscopic surgery. Woodstock ’18: ACM Symposium on Neural Gaze Detection. https://doi.org/10.1145/1122445.1122456
Dong L, Morel G (2016) Robust trocar detection and localization during robot-assisted endoscopic surgery. In: 2016 IEEE International Conference on Robotics and Automation (ICRA). pp 4109–4114
Ritter EM, Scott DJ (2007) Design of a proficiency-based skills training curriculum for the fundamentals of laparoscopic surgery. Surg Innov 14:107–112. https://doi.org/10.1177/1553350607302329
Feldman LS, Cao J, Andalib A, Fraser S, Fried GM (2009) A method to characterize the learning curve for performance of a fundamental laparoscopic simulator task: Defining “learning plateau” and “learning rate.” Surgery 146:381–386. https://doi.org/10.1016/j.surg.2009.02.021
Law B, Atkins SM, Kirkpatrick AE, Lomax AJ (2004) Eye gaze patterns differentiate novice and experts in a virtual laparoscopic surgery training environment | Proceedings of the 2004 symposium on Eye tracking research & applications. Association for Computing Machinery. doi: https://doi.org/10.1145/968363.968370
Harvey A, Vickers JN, Snelgrove R, Scott MF, Morrison S (2014) Expert surgeon’s quiet eye and slowing down: expertise differences in performance and quiet eye duration during identification and dissection of the recurrent laryngeal nerve. Am J Surgery 207:187–193. https://doi.org/10.1016/j.amjsurg.2013.07.033
Hart SG (2006) Nasa-task load index (NASA-TLX); 20 years later. Proc Human Factors Ergonomics Soc Annual Meet 50:904–908. https://doi.org/10.1177/154193120605000909
Laugwitz B, Held T, Schrepp M (2008) Construction and evaluation of a user experience questionnaire. In: Holzinger A (ed) HCI and usability for education and work. Springer
Schrepp M, Hinderks A, Thomaschewski J (2014) Applying the User Experience Questionnaire (UEQ) in Different Evaluation Scenarios. pp 383–392
Hart SG, Staveland LE (1988) Development of NASA-TLX (task load index): results of empirical and theoretical research. In: Hancock PA, Meshkati N (eds) Advances in psychology. North-Holland, pp 139–183
MacLachlan RA, Becker BC, Tabares JC, Podnar GW, Lobes LA, Riviere CN (2012) Micron: an actively stabilized handheld tool for microsurgery. IEEE Trans Rob 28:195–212. https://doi.org/10.1109/TRO.2011.2169634
Prete FP, Pezzolla A, Prete F, Testini M, Marzaioli R, Patriti A, Jimenez-Rodriguez RM, Gurrado A, Strippoli GFM (2018) Robotic versus laparoscopic minimally invasive surgery for rectal cancer: a Systematic review and meta-analysis of randomized controlled trials. Ann Surg 267:1034–1046. https://doi.org/10.1097/SLA.0000000000002523
Ruurda JP, Visser PL, Broeders IAMJ (2003) Analysis of procedure time in robot-assisted surgery: comparative study in laparoscopic cholecystectomy. Comput Aided Surg 8:24–29. https://doi.org/10.3109/10929080309146099
Scott DJ, Ritter EM, Tesfay ST, Pimentel EA, Nagji A, Fried GM (2008) Certification pass rate of 100% for fundamentals of laparoscopic surgery skills after proficiency-based training. Surg Endosc 22:1887–1893. https://doi.org/10.1007/s00464-008-9745-y
Berguer R, Forkey DL, Smith WD (1999) Ergonomic problems associated with laparoscopic surgery. Surg Endosc 13:466–468. https://doi.org/10.1007/pl00009635
Zihni AM, Ohu I, Cavallo JA, Cho S, Awad MM (2014) Ergonomic analysis of robot-assisted and traditional laparoscopic procedures. Surg Endosc 28:3379–3384. https://doi.org/10.1007/s00464-014-3604-9
Hubert N, Gilles M, Desbrosses K, Meyer JP, Felblinger J, Hubert J (2013) Ergonomic assessment of the surgeon’s physical workload during standard and robotic assisted laparoscopic procedures. Int J Med Robot 9:142–147. https://doi.org/10.1002/rcs.1489
Funding
No funding was received to assist with the preparation of this manuscript.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by AN, FP and FV. The first draft of the manuscript was written by AN, and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests to declare that are relevant to the content of this article.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Nassar, A., Vérité, F., Pechereau, F. et al. Adaptative damping assistance in bimanual laparoscopic surgery. Int J CARS 18, 741–751 (2023). https://doi.org/10.1007/s11548-022-02796-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-022-02796-9