
Abstract
Seismic maps of the Sun’s far hemisphere, computed from Doppler data from the Helioseismic and Magnetic Imager (HMI) on board the Solar Dynamics Observatory (SDO) are now being used routinely to detect strong magnetic regions on the far side of the Sun ( http://jsoc.stanford.edu/data/farside/ ). To test the reliability of this technique, the helioseismically inferred active region detections are compared with far-side observations of solar activity from the Solar TErrestrial RElations Observatory (STEREO), using brightness in extreme-ultraviolet light (EUV) as a proxy for magnetic fields. Two approaches are used to analyze nine months of STEREO and HMI data. In the first approach, we determine whether new large east-limb active regions are detected seismically on the far side before they appear Earth side and study how the detectability of these regions relates to their EUV intensity. We find that while there is a range of EUV intensities for which far-side regions may or may not be detected seismically, there appears to be an intensity level above which they are almost always detected and an intensity level below which they are never detected. In the second approach, we analyze concurrent extreme-ultraviolet and helioseismic far-side observations. We find that 100% (22) of the far-side seismic regions correspond to an extreme-ultraviolet plage; 95% of these either became a NOAA-designated magnetic region when reaching the east limb or were one before crossing to the far side. A low but significant correlation is found between the seismic signature strength and the EUV intensity of a far-side region.









Similar content being viewed by others

References
Arge, C.N., Henney, C.J., González Hernández, I., Toussaint, W.A., Koller, J., Godinez, H.C.: 2013, Solar wind 13. AIP Conf. Proc. 1539, 11. DOI .
Braun, D.C., Duvall, T.L. Jr., LaBonte, B.J.: 1988, Astrophys. J. 335, 101. DOI .
Braun, D.C., Duvall, T.L. Jr., LaBonte, B.J., Jefferies, S.M., Harvey, J.W., Pomerantz, M.A.: 1992, Astrophys. J. Lett. 391, L113. DOI .
Braun, D.C., Lindsey, C.: 2001, Astrophys. J. Lett. 560, L189. DOI .
Braun, D.C., Lindsey, C.: 2000, Solar Phys. 192, 307. DOI .
Fontenla, J.M., Quémerais, E., González Hernández, I., Lindsey, C., Haberreiter, M.: 2009, Adv. Space Res. 44, 457. DOI .
González Hernández, I., Hill, F., Lindsey, C.: 2007, Astrophys. J. 669, 1382. DOI .
Harvey, J.W., Hill, F., Hubbard, R.P., Kennedy, J.R., Leibacher, J.W., Pintar, J.A., Gilman, P.A., Noyes, R.W., Title, A.M., Toomre, J., Ulrich, R.K., Bhatnagar, A., Kennewell, J.A., Marquette, W., Patron, J., Saa, O., Yasukawa, E.: 1996, Science 272, 1284. DOI .
Henney, C.J., Hock, R.A., Schooley, A.K., Toussaint, W.A., White, S.M., Arge, C.N.: 2015, Space Weather 13, 141. DOI .
Hickmann, K.S., Godinez, H.C., Henney, C.J., et al.: 2015, Solar Phys. 290, 1105. DOI .
Howard, R.A., Moses, J.D., Vourlidas, A., Newmark, J.S., Socker, D.G., Plunkett, S.P., et al.: 2008, Space Sci. Rev. 136, 67. DOI .
Ilonidis, S., Zhao, J., Hartlep, T.: 2009, Solar Phys. 258, 181. DOI .
Liewer, P.C., González Hernández, I., Hall, J.R., Thompson, W.T., Misrak, A.: 2012, Solar Phys. 281, 3. DOI . (Article I).
Liewer, P.C., Hall, J.R., Lindsey, C., Lin, X.: 2014, Solar Phys. 289, 3617. DOI . (Article II).
Lindsey, C., Braun, D.C.: 1997, Astrophys. J. 485, 895. DOI .
Lindsey, C., Braun, D.C.: 2000, Science 287, 1799. DOI .
Lindsey, C., Braun, D.C.: 2017, Space Weather 15, 761. DOI .
MacDonald, G.A., Henney, C.J., Diaz Alfaro, M., González Hernández, I., Arge, C.N., Lindsey, C., McAteer, R.T.: 2015, Astrophys. J. 807, 21. DOI .
Odstrcil, D., Riley, P., Zhao, X.P.: 2004, J. Geophys. Res. 109, A02116. DOI .
Parker, D.G., Ulrich, R.K., Pap, J.M.: 1998, Solar Phys. 177, 229. DOI .
Qiu, J., Liu, W., Hill, N., Kazachenko, M.: 2010, Astrophys. J. 725, 319. DOI .
Scherrer, P.H., Bogart, R.S., Bush, R.I., Hoeksema, J.T., Kosovichev, A.G., Schou, J., et al.: 1995, Solar Phys. 162, 129. DOI .
Schou, J., Scherrer, P.H., Bush, R.I., Wachter, R., Couvidat, S., Rabello-Soares, M.C., et al.: 2012, Solar Phys. 275, 229. DOI .
Ugarte-Urra, I., Upton, L., Warren, H.P., Hathaway, D.H.: 2015, Astrophys. J. 815, 90. DOI .
Upton, L., Hathaway, D.H.: 2014a, Astrophys. J. 792, 142. DOI .
Upton, L., Hathaway, D.H.: 2014b, Astrophys. J. 780, 5. DOI .
van Driel-Gesztelyi, L., Green, L.M.: 2015, Evolution of active regions. Living Rev. Solar Phys. 12, 1. DOI .
Wang, Y.-M., Sheeley, N.R. Jr.: 1989, Solar Phys. 124, 81. DOI .
Wuelser, J.-P., Lemen, J.R., Tarbell, T.D., Wolfson, C.J., Cannon, J.C., Carpenter, B.A., et al.: 2004, In: Fineschi, S., Gummin, M.A. (eds.) Telescopes and Instrumentation for Solar Astrophysics, Proc. SPIE 5171, 111. DOI .
Zhao, J.W.: 2007, Astrophys. J. Lett. 664, L139. DOI .
Acknowledgements
We would like to thank Jeffrey R. Hall and W. T. Thompson for processing the EUV data and creating the Carrington maps. PCL is grateful to Eric M. DeJong for his encouragement throughout this project. The work of PCL was conducted at the Jet Propulsion Laboratory, California Institute of Technology under a contract from NASA. The work of JQ was supported by the faculty sabbatical program of Montana State University. The work of CL was supported by grants from the Small Business Innovation Research Program of the NOAA and a contract with the Sun–Earth Connection Guest Investigator Program of NASA. The STEREO/SECCHI data used here are produced by an international consortium of the Naval Research Laboratory (USA), Lockheed Martin Solar and Astrophysics Lab (USA), NASA Goddard Space Flight Center (USA), Rutherford Appleton Laboratory (UK), University of Birmingham (UK), Max-Planck-Institut fur Sonnensystemforschung (Germany), Centre Spatiale de Liege (Belgium), Institut d’Optique Theorique et Applique (France), Institut d’Astrophysique Spatiale (France). The HMI data were provided by NASA through the Joint Science Operations Center for the SDO project at Stanford University.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Disclosure of Potential Conflicts of Interest
The authors declare that they have no conflicts of interest.
Electronic Supplementary Material
Below are the links to the electronic supplementary material.
Appendices
Appendix A: Method for the Selection and Characterization of EUV Plage Regions
We have developed a multi-step semi-automated procedure to select EUV plage regions and track their evolution. During its lifetime, a plage is observed to grow and then decay in its intensity (in units DN/s per pixel in an EUV FITS map) as well as its area, similar to the evolution of magnetic field in an active region (Ugarte-Urra et al., 2015). Two or more plages are often located close to each other. For these reasons, our method uses an automated thresholding to identify and track individual plage regions as they evolve, and to distinguish different plage regions that lie close to each other. We consider that the intensity \(C_{i}\) (in DN/s) of a plage pixel should be more than three times the median \(C_{{\mathrm {m}}}\) of the map (e.g. Qiu et al., 2010), the latter representing the quiet-Sun intensity. The plage threshold is therefore \(3 C_{{\mathrm {m}}}\) in this study (cf. Figure 2 and discussion).
In the first step, we first identify the core of each separate plage region: for each EUV map of 3601 by 1801 pixels evenly spaced in longitude \(x\) [0 to 360∘] and latitude \(y\) [−90∘ to +90∘] (Figure A.1a), we make a binary mask: all pixels of intensity higher than the threshold \(3 C_{{\mathrm {m}}}\) are given the value one and the rest are set to zero (Figure A.1b). The binary map is then smoothed with an \(N \times N\) binning. Regions inside the contour level \(\alpha\) of the smoothed map are selected as individual plages. Through many tests of various \(N\) and \(\alpha\) values, we find that the combination of \(N = 40\) and \(\alpha = 0.5\) gives an optimal result per our visual inspection of the plage evolution (see the supplemental 304 Å movies). Most of the time, this combination groups EUV bright pixels that are clustered together into one plage region, and at the same time, it allows separate distinct clusters of bright pixels to be grouped into separate distinct plage regions rather than into one much larger plage. Figure A.1c shows the identified plage regions as a result of this procedure: each contour (of level 0.5) in the figure outlines the core of a separate plage region.

Procedures to determine EUV plage regions. (a) An original EUV FITS map displayed in logarithmic scale. (b) The binary mask with pixels brighter than three times the median intensity marked as 1 (white), and the other pixels marked as zero (black). (c) Smoothed binary mask showing the rectangular boxes enclosing contours at the level \(\alpha =0.5\). (d) Rectangular boxes of plage regions in (c) superimposed on the original EUV map; red contours show the plage pixel threshold level of three times the median intensity of the entire map.
We next need to define a plage boundary to separate nearby plages and to enable us to determine the intensity of a plage by summing the above-threshold pixels. Some nearby above-threshold pixels will lie outside the contour because it was created on the \(N \times N\) smoothed map, so we wish to extend the boundary somewhat to include some of these bright pixels as well. A simple way to define the boundary is to use a rectangular box that is determined by the \(x\) and \(y\) ranges of the 0.5-level contour; we then expand the box by 20% in both \(x\) and \(y\) dimensions. The outer boundaries of each plage region determined in this way are illustrated by the rectangular white boxes in Figure A.1c and d.
Finally, to remove sporadic local brightenings of small features, we also require that a plage should have a size greater than \(20 \times 20\) pixels on the original \(3601 \times 1801\) FITS map. This automatic plage selection method yields a selection of about 12 “boxed” plage regions on a Carrington map in a given day in 2011 or 2012. Figure A.1d shows these boxes enclosing plages plotted on the original map, superimposed with contours of three times the median intensity, which is used as the threshold for plage pixels. Because of the smoothing and enlargement procedures, each plage box extends a little beyond the threshold contour of three times the median intensity \(C_{{\mathrm {m}}}\). This figure also clearly shows the necessity of the smoothing step and of the boundary expansion.
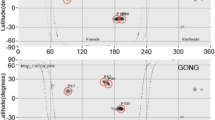
Section 3.2 described our method for associating our set of 27 NOAA LEARs with plage regions, identified as above. Two movies, made from maps such as in Figure 3, are provided in the supplementary online material, 2011euv_lear.mp4 and 2012euv_lear.mp4 . The movies show the time sequence of the STEREO-AIA full-Sun maps for the two periods in this study with a time cadence of 12 hours. Each map is normalized to its median and displayed with a logarithmic scale for clarity. The movies show the evolution of the plages over the months analyzed and also the association between ARs and plages. In each map, a white box denotes the outer boundary of an automatically identified plage region, and the cross inside the box marks the centroid of the plage region. Solid white boxes indicate plage regions that have been associated with an AR in our set. Thus, the same plage region can be identified and tracked (with a white dashed box) for a few weeks to a few months, and when it is associated with one of the 27 LEARs during the two-week period before that active region appears Earth side, the plage region is outlined by a solid white box instead of a dashed white box. In the movies, the location of each LEAR is marked with a circle for 14 days before its Earth-side appearance, and the label (the AR number) is placed at the AR longitude.
As briefly explained in Section 3.2, the automatic plage-NOAA identification sometimes fails when a plage region grows very large so that its centroid position is different from the NOAA position by more than our designated tolerance (15∘ in longitude and 5∘ in latitude). Such errors can be picked out and corrected simply through visual inspection by experienced researchers. Sometimes, when two originally separated yet close-by plage regions grow or when they cross the seam, they appear to merge and to be identified by the automatic approach as one large region. Again, all these cases are picked out manually through visual inspection of the movies. In these situations, the correction is not straightforward. Note that the automated routine identifies plage regions for each EUV map separately. During the rise and decay of close-by plage regions, we find some nearby plage regions that at some point in time are automatically identified together as a large merged region, whereas earlier or later, they are automatically identified as separate regions. Therefore, our routine selects a time either before or after, whichever is closer to the time when the regions are merged, and uses plage boxes from the earlier or later time to replace the automatically identified “merged” plage box at the time of merging. In the supplemental movies, the replacement at a given time is shown as a black box. In this way, we can minimize uncertainties in measuring the plage properties caused by the merging or dispersing.
Appendix B: Comparison of Different Calculations of EUV Plage Intensity
The primary method for measuring plage properties used in this study was described in Section 3 and in more detail in Appendix A. Using the expressions in Equation 1 and the text in Section 3.1, we measured the integrated intensity \(I\), the centroid, and the effective area \(A\) for each plage region associated with an AR using the solid white or solid black box for each time during the 14 days before the AR Earth-side appearance. These measurements of the integrated EUV intensity determined by the primary method are used throughout the study and are shown as solid curves in Figures 4, 5, and 7, and in the plots in Figure 8. To test the robustness of this method, we have calculated the integrated plage intensities by several alternative methods and compared them with those from the primary method.
First, we evaluate the sensitivity of the measurements to the outer boundary (outlined by the box) of the plage regions. Here, we calculate the integrated intensity \(I \) using Equation 1, still summing only over pixels above the \(3C_{{\mathrm {m}}}\) threshold, but using constant rather than dynamically varying boxes over the 14 days before the AR Earth-side appearance. For this test, we chose the constant box in three additional ways: the largest of all dynamically determined boxes over the 14 days (called the “same big box” hereafter), a large box that encloses all dynamically determined boxes over the 14 days (“include-all-box”), or the smallest box (the “same small box”) of all dynamically determined boxes. In the movies, a green box around a plage region denotes the same big box for this plage region, and the other two types of constant boxes are not shown. Results using the same big box were also shown in Figures 4 and 5 (labeled “same box”).
The measured integrated intensity for these three different choices of boxes in comparison with the measurements from dynamically determined boxes (uncorrected and corrected, cf. Section 3) are shown in the top panels of Figures A.2 and A.3 for the time series of plage boxes associated with NOAA ARs 11423 and 11183, respectively. Comparing these curves, we find that integrated EUV intensity \(I \) measured from the two types of constant large boxes (green and violet curves) does not vary significantly from the primary method – dynamically determined and corrected boxes (red curves). For the small box (yellow curves), \(I \) does not vary if the plage does not substantially grow or decay in area during the two weeks on the far side, as in the case of NOAA 11423 (Figure A.2). However, when the area of the active region grows or decays significantly, the small box fails to capture such a rapid evolution and the intensity exhibits a large difference from other methods. The case of NOAA 11183 (Figure A.3) is such an example of a growing active region.

Integrated EUV intensity (normalized to the quiet-Sun intensity integrated over an area of 0.02 steradian) of the EUV plages associated with NOAA AR 11423. EUV intensities are calculated using various methods. The top panel shows the EUV intensity integrated for all pixels in a given rectangular box with an intensity of three times the median, and the bottom panel shows the intensity of all pixels in the box with the median intensity subtracted (Equation 2). In each panel, the evolution of the EUV intensity for 14 days is measured using various boxes: automatically determined rectangular boxes (black line), corrected boxes (red), same big box (green), include all box (violet), and same small box (yellow). Squares or diamonds indicate times when the automatic box was judged too large due to the effect of the seam or merging multiple active regions (cf. Section 3.2).

Same as Figure A.2, but for NOAA AR 11183.
Next, we investigate the effect on the intensity calculation of an alternative method that does not use a threshold intensity. In a previous study (Ugarte-Urra et al. 2015), the EUV intensity, with the quiescent intensity subtracted, was summed over all pixels in an a priori fixed region of an EUV Carrington map. To compare with this study, we also measured EUV intensities in each plage by
where \(C_{i}\), \(x_{i}\), and \(y_{i}\) are the pixel intensity, longitude, and latitude of the \(i\)th pixel, \(C_{{\mathrm {m}}}\) is the median intensity of each map, and \(A_{0}=0.02\) steradian is the same normalization constant as in Equation 1. In this method, the sum is over all pixels in the box, not just pixels exceeding the threshold. Furthermore, we measured \(I'\) in several different ways using the various types of boxes used above: dynamically changing boxes (uncorrected or corrected), same big box, same small box, and include all box. The bottom panels of Figures A.2 and A.3 show examples of these measurements of intensity. The comparison of \(I'\) measured in different boxes is very similar to that of \(I\) using the thresholding method.
We also compared measurements from the two methods with (Figures A.2 and A.3, top panels) or without (bottom panels) the threshold. We find insignificant differences between the \(I\) and \(I'\) measured using the same box. When the box becomes larger, however, \(I'\) increases faster than \(I\), as more pixels of weaker emission are included, whereas the number of above-threshold pixels does not grow much. In this regard, the method of integrating the EUV intensity of the above-threshold pixels is less sensitive to the size of the box, and is therefore more robust.
More importantly, thresholding is critical to help distinguish nearby and evolving plage regions by confining the outer boundary of a plage region using the semi-automated and relatively objective approach; no a priori assumption about the region is necessary. The integrated EUV intensity \(I\), calculated using the threshold in dynamically varying boxes, captures evolution (including growth and decay) of an active region; therefore, this intensity is used throughout the article.
Appendix C: Comparison of Plage Intensity with FS Signature Strength
These different ways to measure the EUV intensity of plage regions associated with active regions are also used to measure the intensity of plages associated with far-side seismic FS regions (cf. Section 3.3). The two movies 2011euv_fs.mp4 and 2012euv_fs.mp4 show the association of the EUV plages with the seismic signatures for every 12 hours during the two time periods of the study. In the movie, EUV plages are marked by white dashed boxes and their centroids are marked by a cross, as described in Appendix A. A plage associated with a seismic signature, whose centroid is marked by a circle and label given at its longitude, is outlined by a white solid box. A black box indicates the correction of merging or seam effects, same as the corrections made to the NOAA association as described in Section 3.2 and Appendix A. The green box around a plage indicates a constant box, which is the largest of all boxes during the seismic detection, used to calculate the EUV plage intensity.
Figure 8 compares the mean intensities \(\left\langle I \right\rangle \) of plages associated with FS regions to the mean seismic signature strengths \(\left\langle S \right\rangle\); both signals were averaged over the time of the seismic detection. Figure A.4 shows the same comparison, but now using eight different measurements of the mean EUV intensity of the plage, described above, versus the FS seismic signature strength \(\left\langle S \right\rangle\). In each panel, black and red symbols show measurements of \(\left\langle I \right\rangle\) and \(\langle I' \rangle\), respectively, and measurements are made in dynamically determined boxes, a constant same big box, a constant include all box, and a constant small box (see previous section). Vertical and horizontal bars indicate the standard deviation of the data points during the seismic detection. It is seen that the trend of the EUV intensity versus seismic signature strength remains very similar.

Comparison of the mean integrated EUV intensity, measured with different methods, and the seismic signature strength \(\left\langle S \right\rangle\), both averaged over the times of the seismic detections. The EUV intensity is measured from a series of boxes determined with four different methods: from corrected boxes, same big box, include all box, and same small box. In each panel, dark symbols show EUV intensities integrated in all pixels in the box with an intensity greater than three times the median, and red symbols show EUV intensities from all pixels in the box with the median intensity subtracted. Vertical and horizontal bars indicate the standard deviation of the measurements during the days of the seismic signal detection.
For the 2011 and 2012 data taken together, the Spearman rank correlation coefficients are 0.52, 0.52, 0.49, and 0.58, respectively, for the \(\left\langle S \right\rangle\) and \(\left\langle I \right\rangle\) measured in varying boxes, constant big box, constant include all box, and constant small box, respectively. For \(\left\langle S \right\rangle\) and \(\langle I' \rangle\) measured in the different boxes, the Spearman rank correlation coefficients are 0.48, 0.47, 0.47, and 0.57, respectively. When we use the maximum seismic signature strength, the correlation coefficients are 0.50, 0.54, 0.52, and 0.51 for \(\left\langle I \right\rangle\), and 0.50, 0.53, 0.54, and 0.49 for \(\langle I' \rangle\). The significance of their deviation from zero is smaller than 3%. Therefore, the correlations are significant. Given the uncertainty in the measurements, we find that all these measurements (except in the constant small box for the reason given in Appendix B) are equivalent in terms of their capability to calibrate the seismic signature strength or to predict the presence of active regions in the far-side hemisphere.
Rights and permissions
About this article

Cite this article
Liewer, P.C., Qiu, J. & Lindsey, C. Comparison of Helioseismic Far-Side Active Region Detections with STEREO Far-Side EUV Observations of Solar Activity. Sol Phys 292, 146 (2017). https://doi.org/10.1007/s11207-017-1159-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11207-017-1159-3