
Abstract
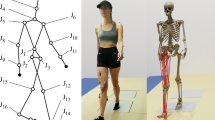
This paper presents a new method to estimate both musculo-tendon forces and detailed joint reactions during gait, using an original 3D lower limb musculo-skeletal model with 5 degrees of freedom: spherical joint at the hip and parallel mechanisms at both knee and ankle. This can be realized by employing a typical set of natural coordinates into a three-steps process. First, the kinematic constraints associated with the kinematic models are applied through a global optimization method on the marker-based kinematics. Consistent time derivatives of the positions are computed by projecting the velocities and accelerations in the null space of the Jacobian matrix. Then, a Lagrangian formulation of the equations of motion is proposed, introducing Lagrange multipliers and allowing a straight access to the musculo-tendon forces. Thanks to a parameter reduction procedure, the Lagrange multipliers are cancelled and the musculo-tendon forces can be computed directly, using a static optimization algorithm with a typical cost function. Finally, the equations of motion are rewritten with the Lagrange multipliers to compute detailed joint reactions (since they represent directly joint contact and ligament forces). Results show that the estimated musculo-tendon forces are consistent with measured EMG signals. Moreover, the use of “anatomically” consistent kinematic models allows computing total joint reaction at hip joint and detailed joint reactions at both knee and ankle joints that are temporally consistent with the forces measured on the subject (i.e., knee joint contact forces) and the forces published in the literature (i.e., hip joint contact forces). Next step will be to optimize simultaneously musculo-tendon forces and joint reactions to investigate and understand the interactions acting into the musculo-skeletal system during gait.







Similar content being viewed by others


References
Alonso, F., Cuadrado, J., Lugris, U., Pintado, P.: A compact smoothing-differentiation and projection approach for the kinematic data consistency of biomechanical systems. Multibody Syst. Dyn. 24(1), 67–80 (2010)
Andersen, M., Damsgaard, M., Rasmussen, J.: Kinematic analysis of over-determinate biomechanical systems. Comput. Methods Biomech. Biomed. Eng. 12(4), 371–384 (2009)
Arnold, E., Ward, S., Lieber, R., Delp, S.: A model of the lower limb for analysis of human movement. Ann. Biomed. Eng. 38(2), 269–279 (2010)
Ausejo, S., Suescun, A., Celigeta, J.: An optimization method for overdetermined kinematic problems formulated with natural coordinates. Multibody System Dynamics, 1–14 (2011)
Bergmann, G., Deuretzbacher, G., Heller, M., Graichen, F., Cuadrado, J., Alonso, F., Rohlmann, A., Strauss, J., Duda, G.: Hip contact forces and gait patterns from routine activities. J. Biomech. 34(7), 859–871 (2001)
Blajer, W., Czaplicki, A., Dziewiecki, K., Mazur, Z.: Influence of selected modeling and computational issues on muscle force estimates. Multibody Syst. Dyn. 24, 473–492 (2010)
Charlton, I., Tate, P., Smyth, P., Roren, L.: Repeatability of an optimised lower body model. Gait Posture 20(2), 213–221 (2004)
Cleather, D., Bull, A.: An optimization-based simultaneous approach to the determination of muscular, ligamentous, and joint contact forces provides insight into musculoligamentous interaction. Ann. Biomed. Eng. 39(7), 1925–1934 (2011)
Collins, J.: The redundant nature of locomotor optimization laws. J. Biomech. 28(3), 251–267 (1995)
Collins, J., O’Connor, J.: Muscle-ligament interactions at hte knee during walking. Proc. Inst. Mech. Eng., H J. Eng. Med. 205(1), 11–18 (1991)
Crowninshield, R., Brand, R.: A physiologically based criterion of muscle force prediction in locomotion. J. Biomech. 14, 793–801 (1981)
De Luca, C., Gilmore, L., Kuznetsov, M., Roy, S.: Filtering the surface emg signal: Movement artifact and baseline noise contamination. J. Biomech. 43(8), 1573–1579 (2010)
De Luca, S.: The use of surface electromyography in biomechanics. J. Appl. Biomech. 13, 135–163 (1997)
Delp, S., Loan, J., Hoy, M., Zajac, F., Topp, E., Rosen, J.: An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures. IEEE Trans. Biomed. Eng. 37(8), 757–767 (1990)
Di Gregorio, R., Parenti-Castelli, V., O’Connor, J., Leardini, A.: Mathematical models of passive motion at the human ankle joint by equivalent spatial parallel mechanisms. Med. Biol. Eng. Comput. 45(3), 305–313 (2007)
D’Lima, D., Patil, S., Steklov, N., Slamin, J., Colwell, C.: Tibial forces measured in vivo after total knee arthroplasty. J. Arthroplast. 21(2), 255–262 (2006)
Dumas, R., Cheze, L.: 3d inverse dynamics in non-orthonormal segment coordinate system. Med. Biol. Eng. Comput. 45(3), 315–322 (2007)
Dumas, R., Cheze, L., Verriest, J.: Adjustments to McConville et al. and Young et al. body segment inertial parameters. J. Biomech. 40(3), 543–553 (2007)
Dumas, R., Moissenet, F., Gasparutto, X., Cheze, L.: Influence of the joint models on the lower limb musculo-tendon and contact forces during gait. Proc. Inst. Mech. Eng., H, J. Eng. Med. (2011). doi:10.1177/0954411911431396
Duprey, S., Cheze, L., Dumas, R.: Influence of joint constraints on lower limb kinematics estimation from skin markers using global optimization. J. Biomech. 43(14), 2858–2862 (2010)
Ehrig, R., Taylor, W., Duda, G., Heller, M.: A survey of formal methods for determining the centre of rotation of ball joints. J. Biomech. 39(15), 2798–2809 (2006)
Erdemir, A., McLean, S., Herzog, W., van den Bogert, A.: Model-based estimation of muscle forces exerted during movements. Clin. Biomech. 22(2), 131–154 (2007)
Feikes, J., O’Connor, J., Zavatsky, A.: A constraint-based approach to modelling the mobility of the human knee joint. J. Biomech. 36(1), 125–129 (2003)
Fregly, B., Besier, T., Lloyd, D., Delp, S., Banks, S., Pandy, M., DLima, D.: Grand challenge competition to predict in vivo knee loads. J. Orthop. Res. (2011, conditionally accepted)
Garcia de Jalon, J., Bayo, E.: Kinematic and Dynamic Simulation of Multibody Systems. The Real-Time Challenge. Springer, New-York (1994)
Kim, H., Fernandez, J., Akbarshahi, M., Walter, J., Fregly, B., Pandy, M.: Evaluation of predicted knee-joint muscle forces during gait using an instrumented knee implant. J. Orthop. Res. 27, 1326–1331 (2009)
Koh, B.I., Reinbolt, J., George, A., Haftka, R., Fregly, B.: Limitations of parallel global optimization for large-scale human movement problems. Med. Eng. Phys. 31(5), 515–521 (2009)
Leardini, A., Chiari, L., Della Croce, U., Cappozzo, A.: Human movement analysis using stereophotogrammetry. Part 3. Soft tissue artifact assessment and compensation. Gait Posture 21(2), 212–225 (2005)
Lenaerts, G., De Groote, F., Demeulenaere, B., Mulier, M., Van der Perre, G., Spaepen, A., Jonkers, I.: Subject-specific hip geometry affects predicted hip joint contact forces during gait. J. Biomech. 41(6), 1243–1252 (2008)
Lin, Y., Walter, J., Banks, S., Pandy, M., Fregly, B.: Simultaneous prediction of muscle and contact forces in the knee during gait. J. Biomech. 22, 945–952 (2010)
Lu, B., O’Connor, J.: Bone position estimation from skin marker co-ordinates using global optimisation with joint constraints. J. Biomech. 32(2), 129–134 (1999)
Moissenet, F., Cheze, L., Dumas, R.: Musculo-tendon forces prediction by static optimization: a comparative study between three methods. J. Biomech. Eng. (2011, under review)
Pandy, M., Andriacchi, T.: Muscle and joint function in human locomotion. Annu. Rev. Biomed. Eng. 12, 401–433 (2010)
Raikova, R.: Investigation of the influence of the elbow joint reaction on the predicted muscle forces using different optimization functions. J. Musculoskelet. Res. 1(1), 31–43 (2009)
Reed, M., Manary, M., Schneider, L.: Methods for Measuring and Representing Automobile Occupant Posture. Society of Automobile Engineers, Warrendale (1999)
Reinbolt, J., Schutte, J., Fregly, B., Koh, B., Haftka, R., George, A., Mitchell, K.: Determination of patient-specific multi-joint kinematic models through two-level optimization. J. Biomech. 38(3), 621–626 (2005)
Seireg, A., Arvikar, R.: The prediction of muscular load sharing and joint forces in the lower extremities during walking. J. Biomech. 8(2), 89–102 (1975)
Shelburne, K., Pandy, M., Anderson, F., Torry, M.: Anterior-Cruciate Ligament Forces in the Intact Knee During Normal Gait. American Society of Biomechanics, Calgary (2002)
Shelburne, K., Torry, M., Pandy, M.: Contributions of muscles, ligaments, and the ground-reaction force to tibiofemoral joint loading during normal gait. J. Orthop. Res. 24(10), 1983–1990 (2006)
Silva, M., Ambrosio, J.: Kinematic data consistency in the inverse dynamic analysis of biomechanical systems. Multibody Syst. Dyn. 8(2), 219–239 (2002)
Stansfield, B., Nicol, A., Paul, J., Kelly, I., Graichen, F., Bergmann, G.: Direct comparison of calculated hip joint contact forces with those measured using instrumented implants. An evaluation of a three-dimensional mathematical model of the lower limb. J. Biomech. 36(7), 929–936 (2003)
Terrier, A., Aeberhard, M., Michellod, Y., Mullhaupt, P., Gillet, D., Farron, A., Pioletti, D.: A musculoskeletal shoulder model based on pseudo-inverse and null-space optimization. Med. Eng. Phys. 32(9), 1050–1056 (2010)
Wilson, D., Feikes, J., O’Connor, J.: Ligament and articular contact guide passive knee flexion. J. Biomech. 31, 1127–1136 (1998)
Zhao, D., Banks, S., D’Lima, D., Colwell, D., Fregly, B.: In vivo medial and lateral tibial loads during dynamic and high flexion activities. J. Orthop. Res. 25, 593–602 (2007)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Moissenet, F., Chèze, L. & Dumas, R. Anatomical kinematic constraints: consequences on musculo-tendon forces and joint reactions. Multibody Syst Dyn 28, 125–141 (2012). https://doi.org/10.1007/s11044-011-9286-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-011-9286-3