
Abstract
Impulsive gravitational waves are theoretical models of short but violent bursts of gravitational radiation. They are commonly described by two distinct spacetime metrics, one of local Lipschitz regularity and the other one even distributional. These two metrics are thought to be ‘physically equivalent’ since they can be formally related by a ‘discontinuous coordinate transformation’. In this paper we provide a mathematical analysis of this issue for the entire class of nonexpanding impulsive gravitational waves propagating in a background spacetime of constant curvature. We devise a natural geometric regularisation procedure to show that the notorious change of variables arises as the distributional limit of a family of smooth coordinate transformations. In other words, we establish that both spacetimes arise as distributional limits of a smooth sandwich wave taken in different coordinate systems which are diffeomorphically related.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Impulsive gravitational waves are exact general relativistic spacetimes providing theoretic models of short but strong bursts of gravitational radiation. Originally introduced by R. Penrose (e.g. [31]), they have since attracted the attention of researchers in exact spacetimes (who have widely generalised the original class of solutions, see, for example, [33]), of theoretical physicists (who have considered quantum scattering and the memory effect in these geometries as well as their astrophysical applications, see, for example, [4, 46]), and of mathematicians (who have used them as relevant key-models in low regularity Lorentzian geometry). For a pedagogical introduction of the various constructions and models as well as their physical properties, see [15, Chapter 20].
Here we focus on a fundamental mathematical issue related to the fact that impulsive gravitational waves are metrics of low regularity. Indeed, they are commonly described by two ‘forms’ of the metric, one (locally Lipschitz-)continuous and the other one distributional. The ‘physical equivalence’ of these two descriptions has been established in several families of these models in a formal way, leaving open some quite subtle problems in low regularity Lorentzian geometry. In fact, both ‘forms’ of the metric are connected via a ‘discontinuous coordinate transformation’ which reflects the Penrose junction conditions used to vividly construct these spacetimes in the first place. This ‘scissors and paste’ approach [31] was recently generalised to the \(\Lambda \not =0\)-case [39].
In this work we completely solve these mathematical issues for the class of all nonexpanding impulsive gravitational waves propagating on backgrounds of constant curvature, i.e. Minkowski space and the (anti-)de Sitter universe. We do so by employing nonlinear distributional geometry, a method which is based on regularisation of the rough metrics and which also brings to light new insights into the geometry and the physics of these spacetimes. We build upon the (nonlinear) distributional analysis of the geodesics in these spacetimes carried out in [43, 45]. Thereby, the current work concludes this long-term research effort in a completely satisfactory way.
This article is organised in the following way. In the next section we recall the relevant aspects of the class of solutions we are working with. In particular, we discuss explicitly the ‘discontinuous coordinate transformation’ thereby also fixing our notations and conventions. We also outline how our results and methods are related to previous works in the case \(\Lambda =0\) [20]. Then, in Sect. 3, we collect the necessary results from the nonlinear distributional analysis of the geodesics in the class of solutions at hand and fix our notation concerning nonlinear distributional geometry. Next, in Sect. 4 we study a special class of null geodesics, namely the null generators of (anti-)de Sitter space in a five-dimensional flat space with impulsive wave which provides us with a natural geometric regularisation of the notorious transformation. In Sect. 5 we analyse the regularised transformation and show that it is a generalised diffeomorphism in the sense of nonlinear distributional geometry. We close with a discussion of our results in Sect. 6.
2 Nonexpanding impulsive waves with \(\Lambda \)
Here we describe the class of nonexpanding impulsive waves with an arbitrary value of \(\Lambda \). These geometries have come into focus with the landmark work of Hotta and Tanaka [19], where in analogy with the classical Aichelburg–Sexl approach [3], the Schwarzschild–(anti-)de Sitter solution is boosted to ultrarelativistic speed to obtain a nonexpanding impulsive gravitational wave generated by a pair of null monopole particles. For an overview of the many more such solutions that have been found since, see, for example, [37, Section 2].
2.1 Metric representations and the ‘discontinuous transformation’
In conformally flat coordinates these solutions for any value of \(\Lambda \) take the distributional form [35]
where \({\mathcal {H}}\) is a real-valued function and \(\delta \) is the Dirac-distribution. Due to the occurrence of a distributional coefficient, (2.1) lies far beyond the Geroch–Traschen class of metrics [12], which is defined by possessing Sobolev regularity \(W^{1,2}_{{\textrm{loc}}}\cap L^\infty _{{ \textrm{loc}}}\). It is known to be the largest class which allows one in general to stably define the curvature in distributions (see also [27, 50]). Nevertheless, due to its simple structure the curvature of (2.1) can be computed explicitly to give the impulsive Newman–Penrose components \(\Psi _4=(1+\frac{1}{6}\Lambda \eta {\bar{\eta }})^2{\mathcal {H}}_{,\eta \eta }\delta ({{\mathcal {U}}})\), and \(\Phi _{22}=(1+\frac{1}{6}\Lambda \eta {\bar{\eta }})\left( (1+\frac{1}{6}\Lambda \eta {\bar{\eta }}) {\mathcal {H}}_{,\eta {\bar{\eta }}}+\frac{1}{6}\Lambda ({\mathcal {H}}-\eta {\mathcal {H}}_{,\eta }-{\bar{\eta }} {\mathcal {H}}_{,{\bar{\eta }}})\right) \delta ({{\mathcal {U}}})\).
The corresponding continuous form of the metric is given by [32, 35]
whereFootnote 1\({G(Z,{\bar{Z}})= Zh_{,Z}+{\bar{Z}}h_{,{\bar{Z}}}-h}\), and h is a real-valued function. Finally, \(u_+=u_+(u)=0\) for \(u\le 0\) and \(u_+(u)=u\) for \(u\ge 0\) is the kink function. The metric (2.2), possessing a Lipschitz continuous coefficient, is of local Lipschitz regularity, which we denote by \(C^{0,1}\). This is still beyond the reach of classical smooth Lorentzian geometry, which roughly reaches down to \(C^{1,1}\) at least as far as convexity and causality is concerned [13, 24, 25, 29]. However, the Lipschitz property is decisive since it prevents the most dramatic downfalls in causality theory which are known to occur for Hölder continuous metrics [6, 14, 17, 30, 44]. More specifically, in the context of the initial value problem for the geodesic equation, the Lipschitz property guarantees the existence of \(C^{1,1}\)-solutions [26, 49] which, due to the special geometry of the models at hand, are even (globally) unique [37].
A very useful way of thinking about the above metrics is the following. Starting with the conformally flat form of the constant curvature backgrounds,
we apply the transformation
to (2.3) separately for negative and positive values of \(\mathcal {U}\) to formally obtain (2.2). The corresponding distributional form (2.1) is formally derived by writing (2.4) in the form of a ‘discontinuous coordinate transform’ using the Heaviside function \(\Theta \), i.e.
Then applying (2.5) to (2.2) and retaining all distributional terms one arrives at (2.1).
This transformation has first been given in [31] for plane waves and in [2, 41] for the general pp-wave case, i.e. nonexpanding impulsive waves propagating in a Minkowski background, hence \(\Lambda =0\) in the above metrics (2.2), (2.1). Clearly, a mathematically sound treatment of the transformation (2.5) is a delicate matter, and it is the topic of this paper to completely clarify the situation.
2.2 Results in the pp-wave case
A first rigorous result in this realm has been established in [21] in the special case of impulsive pp-waves. There, nonlinear distributional geometry [16, Chapter 3] based on algebras of generalised functions [7] has been employed to show the following: The ‘discontinuous coordinate change’ (2.5) relating the distributional Brinkmann form of the metric, i.e. (2.1) with \(\Lambda =0\) to the continuous Rosen form, i.e. (2.2) with \(\Lambda =0\) is the distributional limit of a generalised diffeomorphism, a concept to be detailed below. Intuitively speaking this approach consists in viewing the impulsive wave as a limiting case of a sandwich wave with an arbitrarily regularised wave profile, where the two forms of the metric arise as its (distributional) limits taken in different coordinate systems. This result rests on two pillars:
-
(A)
The realisation that a special family of null geodesics in the distributional form of the metric precisely gives the coordinate lines of the coordinate system underlying the continuous form of the metric [47]. In simpler words, the transformation (2.5) is given by a special family of null geodesics.
-
(B)
A fully nonlinear distributional analysis of the geodesics of the distributional metric. This is even a prerequisite to make (mathematical) sense of item (A): There is no valid solution concept for the geodesic equations of (2.1) with \(\Lambda =0\) in classical distribution theory. Hence, in [20, 47] nonlinear distributional geometry has been employed to show existence, uniqueness and completenessFootnote 2 of geodesics.
Here we set out to apply an analogous strategy to deal with the more involved \(\Lambda \not =0\)-case. In fact, building on earlier results we provide the keystone of this approach: In [43] a nonlinear distributional analysis of the geodesic equation, see item (B) above, has been established. These results are in turn based on the formal analysis of the geodesics in [36] and the fixed point techniques put forward in [45]. We will collect the relevant statements in Sect. 3.3, below.
On the other hand, the geometric issue (A) has recently been resolved in [39] and we will review the results relevant for the present work in Sect. 4.1, below.
In the nonlinear distributional analysis of the geodesics of [43, 45], it has, however, turned out that a five-dimensional approach is much better suited than a direct approach using the metric (2.1). Indeed since [36] all works relevant for us have used this five-dimensional formalism and we close this section by briefly recalling it. The basic idea is to describe an impulsive wave in (anti-)de Sitter space as a hyperboloid in a five-dimensional flat space with impulsive wave [34, 35].
2.3 The five-dimensional formalism
One starts out with the five-dimensional impulsive pp-wave manifold
with the constraint
and parameters \(\sigma =\pm 1 = \textrm{sign}\, \Lambda \) and \(a=\sqrt{\frac{3}{\sigma \Lambda }}\). The metric (2.6) with (2.7) thus represents an impulsive wave with the impulse located on the null hypersurface \({U=0}\),
corresponding to a nonexpanding 2-sphere for \({\Lambda >0}\) and a hyperboloidal 2-surface for \({\Lambda <0}\).
Now, to relate (2.6), (2.7) to the four-dimensional distributional form (2.1) we may use the transformation
where we have used
and the associated real coordinates x, y with \(\eta =1/\sqrt{2}(x+iy)\). Finally, the profile functions are related by
3 Nonlinear distributional analysis of the geodesics
In this section we collect the results from the nonlinear distributional analysis of the geodesic equation in nonexpanding impulsive gravitational waves which we are going to use in the course of our work, cf. item (B) above. To keep this manuscript self-contained, we start with a very terse review of the main elements of nonlinear distributional Lorentzian geometry.
3.1 Nonlinear distributional geometry
The theory we are going to summarise (for all details see [22, 23, 16, Section 3.2]) rests on J.F. Colombeau’s construction of (so-called special) algebras of generalised functions [7]. These provide an extension of the linear theory of Schwartz distributions to the nonlinear realm retaining maximal consistency with classical analysis. The basic idea of the construction is regularisation of distributions via nets of smooth functions combined with asymptotic estimates in terms of a regularisation parameter.
On a smooth (second countable and Hausdorff) manifold M denote by \(\mathcal {E}(M)\) the set of all nets of smooth functions \((u_\varepsilon )_{\varepsilon \in (0,1]=:I}\) which in addition depend smoothlyFootnote 3 on \(\varepsilon \). The algebra of generalised functions on M is defined as the quotient \({\mathcal {G}}(M) := \mathcal {E}_{\textrm{M}}(M)/\mathcal {N}(M)\) of moderate modulo negligible nets in \(\mathcal {E}(M)\), which are defined via the following asymptotic estimates
Here \(\mathcal {P}\) denotes the space of all linear differential operators on M and \(K\Subset M\) means that K is a compact subset of M. We write \(u = [(u_\varepsilon )_\varepsilon ]\) for the elements of \({\mathcal {G}}(M)\) and call \((u_\varepsilon )_\varepsilon \) a representative of the generalised function u. With sums, products, and the Lie derivative defined componentwise (i.e. for fixed \(\varepsilon \)) \({\mathcal {G}}(M)\) becomes a fine sheaf of differential algebras.
The space of distributions \(\mathcal {D}'(M)\) can be embedded into \({\mathcal {G}}(M)\) via sheaf homomorphisms \(\iota \) that preserve the product of \(\mathcal {C}^\infty (M)\)-functions. A coarser way of relating generalised functions in \({\mathcal {G}}(M)\) to distributions is as follows: \(u\in {\mathcal {G}}(M)\) is called associated with \(v\in {\mathcal {G}}(M)\), written \(u\approx v\), if \(u_\varepsilon - v_\varepsilon \rightarrow 0\) in \(\mathcal {D}'(M)\). Moreover, \(w\in \mathcal {D}'(M)\) is called associated with u if \(u\approx \iota (w)\). More generally, the space of generalised sections of a vector bundle \(E\rightarrow M\) is defined as \( \Gamma _{\mathcal {G}}(M,E) = {\mathcal {G}}(M) \otimes _{\mathcal {C}^\infty (M)} \Gamma (M,E)= L_{\mathcal {C}^\infty (M)}(\Gamma (M,E^*),{\mathcal {G}}(M)). \) It is a fine sheaf of finitely generated and projective \({\mathcal {G}}\)-modules. For generalised tensor fields of rank r, s we use the notation
Observe that it is possible to insert generalised vector fields and one-forms into generalised tensors, which is not possible in the distributional setting, cf. [8, 28]. This in turn allows one to work with generalised metrics much as in the smooth setting. Here a generalised pseudo-Riemannian metric is a section \(g\in {\mathcal {G}}^0_2(M)\) that is symmetric with determinant \(\det g\) invertible in \({\mathcal {G}}\) (equivalently \(|\det (g_\varepsilon )_{ij}| \ge \varepsilon ^m\) for some m on compact sets), and a well-defined index \(\nu \) (the index of \(g_\varepsilon \) equals \(\nu \) for \(\varepsilon \) small). By a ‘globalization Lemma’ in [25, Lemma 2.4, p. 6] any generalised metric g possesses a representative \((g_\varepsilon )_\varepsilon \) such that each \(g_\varepsilon \) is a smooth metric globally on M. We call a pair (M, g) consisting of a smooth manifold and a generalised pseudo-Riemannian (Lorentzian) metric a generalised pseudo-Riemannian (Lorentzian) manifold, and a generalised spacetime if, in addition to being Lorentzian, it can be time oriented by a smooth vector field. This setting consistently extends the ‘maximal distributional’ one of Geroch and Traschen, see [48, 50]. In particular, any generalised metric induces an isomorphism between generalised vector fields and one-forms, and there is a unique Levi–Civita connection \(\nabla \) corresponding to g.
Next, to speak of geodesics one uses the space of generalised curves \({\mathcal {G}}[J,M]\) taking values in M, defined on an interval J. It is again a quotient of moderate modulo negligible nets \((\gamma _\varepsilon )_\varepsilon \) of smooth curves, where we call a net moderate (negligible) if \((\psi \circ \gamma _\varepsilon )_\varepsilon \) is moderate (negligible) for all smooth \(\psi :M\rightarrow \mathbb {R}\). In addition, \((\gamma _\varepsilon )_\varepsilon \) is supposed to be c-bounded, which means that \(\gamma _\varepsilon (K)\) is contained in a compact subset of M for \(\varepsilon \) small and all compact sets \(K\Subset J\). Observe that no distributional counterpart of such a space exists and it has long been realised that regularisation is a possible remedy, cf. [28].
The induced covariant derivative of a generalised vector field \(\xi =[(\xi _\varepsilon )_\varepsilon ]\in {\mathcal {G}}^1_0(M)\) on a generalised curve \(\gamma =[(\gamma _\varepsilon )_\varepsilon ]\in {\mathcal {G}}[J,M]\) is defined componentwise (i.e. by the classical formulae for fixed \(\varepsilon \)) and gives again a generalised vector field \(\xi '\) on \(\gamma \). In particular, a geodesic in a generalised spacetime is a curve \(\gamma \in {\mathcal {G}}[J,M]\) satisfying \(\gamma ''=0\). Equivalently, the usual local formula holds, i.e.
where \(\Gamma ^k_{ij}=[({\Gamma _\varepsilon }^k_{ij})_\varepsilon ]\) denotes the Christoffel symbols of the generalised metric \(g=[(g_\varepsilon )_\varepsilon ]\). Finally we say that a generalised spacetime (M, g) is geodesically complete if every geodesic \(\gamma \) can be defined on \(\mathbb {R}\) [42, Definition 2.1, p. 240].
3.2 Impulsive waves as generalised spacetimes and the geodesic equation
In this section we introduce the generalised metric form of nonexpanding impulsive waves for arbitrary values of \(\Lambda \), using the five-dimensional formalism of Sect. 2.3. Indeed, starting with the metric (2.6) we replace the Dirac-delta with a generic regularisation: Choose any smooth function \(\rho \) on \(\mathbb {R}\) with unit integral and support in \([-1,1]\) and for \(\varepsilon \in (0,1]\) set \(\delta _\varepsilon (x):=(1/\varepsilon )\,\rho (x/\varepsilon )\). Such a net \((\delta _\varepsilon )_\varepsilon \) is called a model delta net and we use it to define the regularised pseudo-Riemannian manifold \(({\bar{M}}=\mathbb {R}^5,{\bar{g}}_\varepsilon )\) with line element
Hence, \(({\bar{M}},{\bar{g}}_\varepsilon )\) is a smooth sandwich wave which is flat space outside the wave zone given by \(|U|\le \varepsilon \). The regularised impulsive wave spacetime of our interest \((M,g_\varepsilon )\) is now given by the (anti-)de Sitter hyperboloid (2.7) embedded in \(({\bar{M}},{\bar{g}}_\varepsilon )\).
To obtain an impulsive wave metric in \({\mathcal {G}}^0_2(\mathbb {R}^5)\), we use a model delta function, that is an element \(D\in {\mathcal {G}}(\mathbb {R})\) that has a model delta net as a representative, \(D=[(\delta _\varepsilon )_\varepsilon ]\). Next we consider the five-dimensional generalised impulsive pp-wave manifold \(({\bar{M}}=\mathbb {R}^5,{\bar{g}})\) with
One easily checks that this defines a generalised metric with representative (3.3). At this point we specify the (A)dS hyperboloid M in \(({\bar{M}},{\bar{g}})\) as usual, explicitly by
Note that M is a (classical) smooth hypersurface. Finally, we restrict the metric \({\bar{g}}\) (again componentwise, that is for fixed \(\varepsilon \)) to M to obtain the generalised spacetime (M, g) which we take as our model of nonexpanding impulsive waves propagating in a(n anti-)de Sitter universe.
To derive the geodesic equations in (M, g) we use the fact that in nonlinear generalised functions all classical formulae hold for fixed \(\varepsilon \). So, we derive the M-geodesics from the condition that their \({\bar{M}}\)-acceleration is normal to M, \({\bar{\nabla }}_T T=-\sigma g(T,{\bar{\nabla }}_T N)N/g(N,N)\). Here \({\bar{\nabla }}\) is the generalised Levi–Civita connection of \(({\bar{M}},{\bar{g}})\), and T and N denote the geodesic tangent and the (non-normalised) normal vector to M defined via its representative \(N^\alpha _\varepsilon =g^{\alpha \beta }_\varepsilon dF_\beta \), respectively. In this way we arrive at the geodesic equations for \(\gamma =(U,V,Z_p)\):
Here \(e=|{\dot{\gamma }}|=\pm 1,0\) for which it is natural to be fixed independently of \(\varepsilon \) and we have used the usual convention for spatial coordinates, i.e. \(Z_p\) for \(p=2,3,4\) and \(Z_i\) for \(i=2,3\). Moreover, we used the abbreviation \({\tilde{G}} = \delta ^{pq} Z_p H_{,q} - H\).
3.3 Existence and uniqueness of geodesics
Next we briefly indicate how one proves unique solvability of the initial value problem for differential equations like (3.6) in generalised functions. This is basically done in three steps:
-
(1)
One proves existence of a so-called solution candidate, in our case a net of smooth functions \(\gamma _\varepsilon =(U_\varepsilon ,V_\varepsilon ,Z_{p\varepsilon }):J\rightarrow M\) depending smoothly on the parameter \(\varepsilon \) and solving the corresponding equation componentwise, i.e. for fixed (small) \(\varepsilon \). In our case this means \(\gamma _\varepsilon \) solves
$$\begin{aligned} \begin{aligned} \ddot{U}_\varepsilon&=-\left( e + \frac{1}{2}\,\dot{U}_\varepsilon ^2\,\tilde{G_\varepsilon } - \dot{U}_\varepsilon \,\big (H \,\delta _{\varepsilon } \,U_\varepsilon \dot{\big )}\right) \ \frac{U_\varepsilon }{\sigma a^2-U_\varepsilon ^2H\delta _\varepsilon }\,, \\ \ddot{V}_\varepsilon -\frac{1}{2}\,H \,\delta ^{'}_{\varepsilon } \,\dot{U}_\varepsilon ^2 - \delta ^{pq}H_{,p} \,\delta _{\varepsilon } \,\dot{Z}_{q\varepsilon }\,\dot{U}_\varepsilon&=-\left( e + \frac{1}{2}\,\dot{U}_\varepsilon ^2\,\tilde{G}_\varepsilon - \dot{U}_\varepsilon \, \big ( H\, \delta _\varepsilon \, U_\varepsilon \dot{\big )}\right) \ \frac{V_\varepsilon +H\,\delta _{\varepsilon }U_\varepsilon }{\sigma a^2-U_\varepsilon ^2H\delta _\varepsilon }\,,\\ \ddot{Z}_{i\varepsilon }-\frac{1}{2}H_{,i}\,\delta _{\varepsilon }\dot{U}_\varepsilon ^2&=-\left( e + \frac{1}{2}\,\dot{U}_\varepsilon ^2\,\tilde{G}_\varepsilon - \dot{U}_\varepsilon \, \big ( H\, \delta _\varepsilon \, U_\varepsilon \dot{\big )}\right) \ \frac{Z_{i\varepsilon }}{\sigma a^2-U_\varepsilon ^2H\delta _\varepsilon }\,,\\ \ddot{Z}_{4\varepsilon }-\frac{\sigma }{2}\,H_{,4}\,\delta _{\varepsilon }\dot{U}_\varepsilon ^2&=-\left( e + \frac{1}{2}\,\dot{U}_\varepsilon ^2\,\tilde{G}_\varepsilon - \dot{U}_\varepsilon \, \big ( H\, \delta _\varepsilon \, U_\varepsilon \dot{\big )}\right) \ \frac{Z_{4\varepsilon }}{\sigma a^2-U_\varepsilon ^2H\delta _\varepsilon }\,, \end{aligned} \end{aligned}$$(3.7)where we (again) have suppressed the parameter \(\lambda \) as well as the dependencies on the variables. However, note that always
$$\begin{aligned} \delta _\varepsilon&=\delta _\varepsilon (U_\varepsilon (\lambda ))\,,\quad \delta '_\varepsilon =\delta '_\varepsilon (U_\varepsilon (\lambda ))\,,\nonumber \\ {\tilde{G}}_\varepsilon&=\!\tilde{G}_\varepsilon \big (U_\varepsilon (\lambda ),Z_{p\varepsilon }(\lambda )\big )\,, \, H\!=\!H\big (Z_{p\varepsilon }(\lambda )\big )\,,\quad \text {and}\, H_{,p}\!=\!H_{,p}\big (Z_{q\varepsilon }(\lambda )\big )\,. \end{aligned}$$(3.8)Observe that a solution candidate \((\gamma _\varepsilon )_\varepsilon \) actually is comprised of geodesics \(\gamma _\varepsilon \) of the regularised spacetime \((M,g_\varepsilon )\), cf. (3.3).
-
(2)
One shows existence of a generalised solution by establishing c-boundedness and moderateness of the solution candidate, i.e. \(\gamma :=[(\gamma _\varepsilon )_\varepsilon ]\in {\mathcal {G}}[J,M]\).
-
(3)
To show uniqueness in \({\mathcal {G}}\), one solves a negligibly perturbed version of the equations—in our case (3.7), with negligible nets added at the right hand side of every equation—and shows that the corresponding net of solution \((\tilde{\gamma }_\varepsilon )_\varepsilon \) only differs negligibly from \((\gamma _\varepsilon )_\varepsilon \), i.e. \([(\tilde{\gamma }_\varepsilon )_\varepsilon ] =[(\gamma _\varepsilon )_\varepsilon ]\). Observe that this amounts to an additional stability statement for the solutions of the regularised equation.
With this let us turn to initial conditions for solutions of the system (3.6) appropriate for our purpose, see also Fig. 1. Consider a geodesic \(\gamma ^-=(U^-,V^-,Z^-_{p})\) of the background (anti-)de Sitter universe without impulsive wave but reaching \(U=0\) and assume that we have chosen an affine parameter such that \(U^-(0)=0\) and \(\dot{U}^-(0)=1\). Further, since we will only be interested in null geodesics, we have that \({\dot{\gamma }}^-\) is null, i.e. \(e=0\). Now we conveniently prescribe initial data at the affine parameter value \(\lambda =0\),
where the constants satisfy the constraints
and the normalisation
We will refer to \(\gamma ^-\) as seed geodesics and start to think of it as geodesics in the impulsive wave spacetime (2.6), (2.7) ‘in front’ of the impulse, that is for \(U^-<0\). Also, \(\gamma ^-\) is a geodesic in the regularised spacetime (3.3), (2.7) ‘in front’ of the sandwich wave, that is for \(U^-\le -\varepsilon \). We will denote the affine parameter time when \(\gamma ^-\) enters this regularisation wave region by \(\alpha _\varepsilon \), i.e.
Observe that \(\alpha _\varepsilon \rightarrow 0\) from below as \(\varepsilon \rightarrow 0\). Finally, we come to setting up the data for the solution candidate \(\gamma _\varepsilon \) of the system (3.6) by
i.e. as the data the seed geodesic assumes at \(\alpha _\varepsilon \). We will frequently refer to these data (3.13) as initial data constructed from the seed geodesic \(\gamma ^-\) with data (3.9).

The U-component of the seed geodesic \(\gamma ^-\) is depicted in black until it reaches the regularisation sandwich at parameter time \(\lambda =\alpha _\varepsilon \), i.e. \(U^-(\alpha _\varepsilon )=-\varepsilon \). While in the background spacetime it would continue as the dotted red line to \(U=0\) at \(\lambda =0\), in the regularised spacetime it continues as a solution \(\gamma _\varepsilon \) of (3.7) with data (3.13) (depicted in green). Theorem 3.1 guarantees that \(\gamma _\varepsilon \) (for \(\varepsilon \) small) leaves the regularisation sandwich at \(\lambda =\beta _\varepsilon \) and continues as a background geodesic (colour figure online)
The central result on the solvability of the geodesic equations for the generalised spacetime (3.4), (3.5) now is the following, cf. [43, Thms. 3.6, 3.7].
Theorem 3.1
(Global existence and uniqueness). The geodesic equation (3.6) with initial data (3.13) (constructed from the seed geodesic \(\gamma ^-\) with data (3.9)) possesses a global unique solution \(\gamma =(U,V,Z_p)=[(\gamma _\varepsilon )_\varepsilon ]\in {\mathcal {G}}[\mathbb {R},M]\).
3.4 Associated geodesics
Here we recall the associated geodesics of the solutions \([(\gamma _\varepsilon )_\varepsilon ]\) of Theorem 3.1 which were given in [43, Sec. V] based on the explicit calculations in [45, Sec. 5, Appendix B], see also [36, Eqs. (38), (39)] for a formal approach. These are calculated as the (distributional) limits of the representatives \(\gamma _\varepsilon =(U_\varepsilon ,V_\varepsilon ,Z_{p\varepsilon })\) of the solutions of Theorem 3.1.
Now to formulate a precise result we first establish a notation for the limiting geodesics. Clearly in front of the impulse, that is for \(\lambda <0\) corresponding to \(U_\varepsilon <0\), \(\gamma _\varepsilon \) will converge to the seed geodesic \(\gamma ^-\). Similarly, behind the impulse, that is for \(\lambda >0\) corresponding to \(U_\varepsilon >0\), \(\gamma _\varepsilon \) will also converge to a geodesic \(\gamma ^+\) of the background (A)dS space. Here \(\gamma ^+=(U^+,V^+,Z_p^+)\) is specified by the values of \(\gamma _\varepsilon \) and \({\dot{\gamma }}_\varepsilon \) upon leaving the regularisation zone: Indeed, it is shown in the course of the proof of Theorem 3.1 (cf. [43, eq. (34) and below]) that there is a parameter value \(\beta _\varepsilon >0\) such that \(U_\varepsilon (\beta _\varepsilon )=\varepsilon \) and that \(\beta _\varepsilon \searrow 0\) for \(\varepsilon \rightarrow 0\), c.f. [45, Lem. A2]. Moreover, the corresponding values of \(\gamma _\varepsilon (\beta _\varepsilon )\) and \({\dot{\gamma }}_\varepsilon (\beta _\varepsilon )\) converge (cf. [45, Prop. 5.3]). More precisely, we have
where \(V^0\), \(Z^0_{p}\), \(\dot{V}^0\), \(\dot{Z}^0_{p}\) are the corresponding seed data (3.9), and
Now we explicitly fix the limiting geodesic behind the wave \(\gamma ^+\) by prescribing the data
and denote the corresponding global limiting geodesic by
Then we have by [43, Thm. 5.2] and [45, Thm. 5.1], respectively, the following convergence result.
Theorem 3.2
(Associated geodesics). The solution \(\gamma =(U,V,Z_p)=[(\gamma _\varepsilon )_\varepsilon ]\) of Theorem 3.1 is associated with the limiting geodesic \({\tilde{\gamma }}\) of (3.17). Moreover, we have \(U\approx _1{\tilde{U}}\) and \(Z_p\approx _0{\tilde{Z}}_p\).
Recall that, for example, \(V=[(V_\varepsilon )_\varepsilon ]\approx {\tilde{V}}\) means that \(\lim _{\varepsilon \rightarrow 0} \int _\mathbb {R}V_\varepsilon (x)\varphi (x)\,\mathrm{{d}}x = \langle \tilde{V},\varphi \rangle \) for all test functions \(\varphi \in \mathcal {D}(\mathbb {R})\) (and \(\langle \,.\,,\,.\,\rangle \) denotes the distributional action). Similarly, \({\tilde{U}}=[(U_\varepsilon )_\varepsilon ]\approx _k {\tilde{U}}\) \((k\in \mathbb {N})\) means that \(U_\varepsilon \rightarrow {\tilde{U}}\) in \(C^k(\mathbb {R})\), i.e. uniformly on all compact subsets of \(\mathbb {R}\) up to derivatives of order k. Note that the convergences given by Theorem 3.2 are optimal in the light of \({\tilde{V}}\) and \(\dot{\tilde{Z}}_p\) being discontinuous across \(\lambda =0\), i.e. the limiting geodesics being refracted geodesics of the background suffering a jump in the V-position and V-velocity as well as in the \(Z_p\)-velocity, cf. [45, Section 5].
Note that the limiting geodesics \({\tilde{\gamma }}\) of (3.17) can be interpreted as the geodesics of the distributional spacetime (2.6), (2.7). Keep in mind, however, that (3.17) does not solve the (formal) geodesic equations of the distributional spacetime (see [45, Eq. (2.6)], [36, Eq. (28)]) by the lack of a consistent solution concept. Indeed, the low regularity of \({\tilde{\gamma }}\) does not allow one to insert it into these equations.
Finally, we will mainly be interested in the null case where we can give a more transparent form of \({\tilde{\gamma }}\), cf. [39, Eq. (29)] due to the fact that the null geodesics of the (A)dS background are just straight lines, cf. [36, Sec. 4]
4 The null geodesic generators and the transformation
In this section we turn to issue (A) of Sect. 2.2 which has been resolved in the \(\Lambda \not =0\)-case in [39]. Briefly, the main result is that the null geodesic generators of the (A)dS hyperboloid give rise to the notorious transformation (2.5). We will combine this insight with the results of Sect. 3 to derive a geometric regularisation of the transformation.
4.1 The null geodesic generators and the ‘discontinuous transformation’
To begin with, we relate the limiting null geodesics of (3.18) to the null geodesic generators of the (A)dS hyperboloid. The latter are most conveniently found using the conformally flat coordinates of the (A)dS background (2.3) to be (cf. [39, Eq. (18), (19)]Footnote 4)
where
This family of null geodesics is parameterised by three real constants fixing the positions at the parameter value \({\mathcal {U}}=\lambda =0\), i.e. \(\gamma ^g_{4D}(0)=(0,{\mathcal {V}}_0,x_0,y_0\)).
Next we write the null generators (4.1) in the five-dimensional representation of Sect. 2.3 but still parameterised by the 4D-data \(({\mathcal {V}}_0, x_0,y_0)\) (cf. [39, Eq. (26)])
Observe from the first line that \(U^g(\lambda )=\lambda \). Now we use the geodesics (4.3) for \(\lambda \le 0\) as seed for the global limiting null geodesics (3.18), that is, according to (2.9), we set the eight constants \(V^0\), \(Z^0_p\), \(\dot{V}^0\), and \(\dot{Z}^0_p\) of (3.9) to
which relates them to the three parameters \({\mathcal {V}}_0,x_0,y_0\). Now we obtain the global limiting geodesic (3.18) with seed given by the null geodesic generator of the (A)dS hyperboloid with data \(({\mathcal {V}}_0,x_0,y_0)\) as
where we have to substitute (4.4) into (3.15). Finally, we express these geodesics in the 4D coordinates \(({\mathcal {U}},{\mathcal {V}},x,y)\) of (2.1) (cf. [39, Eq. (40)]) as
where the profile function and its derivatives are explicitly related by, see (2.11)Footnote 5
Here \(H^{\textrm{i}}\) and \({{\mathcal {H}}}^{\textrm{i}}\) as well as the corresponding derivatives denote the respective values at the instant of interaction of the geodesics with the impulse, i.e. at the parameter value \({\mathcal {U}}=\lambda =0\). So, we, for example, have \(H_{,j}^{\textrm{i}}=H_{,j}(Z^0_p)\). Also the constants \(A_p\), B, and C can explicitly be written in terms of \({\mathcal {H}}\), cf. [39, Eqs. (33)–(35)]
where \({\mathcal {G}}\) and the conformal factor take the form
The key observation at this point is that the limiting geodesics (4.6) exactly match the transformation (2.5). More precisely (cf. [39, Sec. IV]), we may employ (4.6) to transform the coordinates \((u,v,Z)\equiv (u,v,X,Y)\) in which the metric is continuous (cf. (2.2)) to the coordinates \(({\mathcal {U}},{\mathcal {V}},\eta )\equiv ({\mathcal {U}},{\mathcal {V}},x,y)\) in which the metric is distributional (cf. (2.1)) via
We have hence formally recovered the ‘discontinuous transformation’ from a special family of global limiting null geodesics, which can be interpreted as the geodesics of the distributional spacetime (2.6), (2.7), cf. the penultimate paragraph of Sect. 3.4.
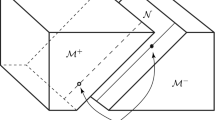
Moreover, the behaviour of these geodesics can be vividly depicted, see Fig. 2 (cf. [39, Fig. 2], and [40, Fig. 6]) in a way that directly generalises Penrose’s original illustration for the \(\Lambda =0\)-case in [31, Fig. 2]: The null geodesic generators of (A)dS starting in the ‘lower half’ \((A)d\mathcal {S}^-\) (i.e. for \(U=\lambda <0\)) due to their interaction with the wave impulse do not continue as unbroken null generators into \((A)d\mathcal {S}^+\) (indicated by the dashed line in the upper left parts). Rather they jump at \(\{U=\lambda =0\}\), cf. the \(\Theta \)-term in (4.6) (hence in (4.10)) but also get refracted, cf. the \(\lambda _+\)-terms, to become the appropriate null generators of \((A)d\mathcal {S}^+\).

The null geodesic generators of (A)dS and their interaction with the impulsive wave
The upshot is that these ‘broken geodesic generators’ basically are the coordinate lines of the coordinate system in which the metric becomes continuous, i.e. (2.2). But we do not only have these limiting geodesics at hand but also the generalised geodesics of Theorem 3.1. This will allow us to geometrically regularise the transformation, which we will explicitly do next.
4.2 The geometrically regularised transformation
Using the ideas laid out above, we now give the explicit form of the transformation in nonlinear generalised functions. To begin with, note that we only have carried out the nonlinear distributional analysis of the geodesics in the 5D-form.Footnote 6 Therefore, we split up the transformation in the following way: starting from the ‘continuous’ 4D-coordinates \((u,v,Z)\equiv (u,v,X,Y)\) of (2.2) we first use the transformation (2.9)Footnote 7 to go to the 5D-coordinates \((U,V,Z_p)\). Then we use the regularised geodesics to transform
whereFootnote 8\([(\gamma ^\varepsilon _{5D}[V,Z_p])_\varepsilon ]\) are the generalised solutions of the geodesic equations provided by Theorem 3.1 with data constructed from the seed geodesic \(\gamma ^g_{5D}\) of (4.3), i.e. the null generator with data \((V,Z_p,\dot{V},\dot{Z}_p)\) as in (4.4), but now derived from (v, X, Y) instead of \(({\mathcal {V}}_0,x_0,y_0)\). We will specify this data explicitly below but first we turn to the final part of the transformation. For this we use the inverse of (2.9), i.e.
componentwise (that is for fixed \(\varepsilon \)), to go from the 5D-coordinates \(({\bar{U}}_\varepsilon ,{\bar{V}}_\varepsilon ,{\bar{Z}}_{p\varepsilon })\) to 4D coordinates \(({\mathcal {U}}_\varepsilon ,{\mathcal {V}}_\varepsilon ,x_\varepsilon ,y_\varepsilon )\), which provide a regularisation of the 4D ‘distributional’ system. That is, overall the transformation we are going to employ takes the form
This is the sensible geometric regularisation of the ‘discontinuous transformation’ (4.10), which we have been aiming for.
Since the first and the third maps in the overall transformation (4.13) are (classical smooth) diffeomorphisms, it is sufficient to restrict our nonlinear distributional analysis of the transformation to \(T_\varepsilon \). Therefore, we do not need to take into account that the data \((V,Z_p,\dot{V},\dot{Z}_p)\) of (4.3) is derived from the 4D-data (v, X, Y) (according to (4.4)). We only have to observe the special form of the null geodesic generators \(\gamma ^g_{5D}\). In fact, we have
where \( \beta =-(\Lambda /6)\,\Omega V\), and \(\Omega =(2a)/(Z_4+a)\).
Let us now derive the explicit form of \(T_\varepsilon \). According to (4.13) we set
where \(\gamma ^\varepsilon _{5D}\) solves (3.7) with data
i.e. data constructed from the null geodesic generator \(\gamma ^g_{5D}\) with data (4.14) as seed. Since these data essentially reduce to the four parameters \((V,Z_p)\), we will refer to \(\gamma ^\varepsilon _{5D}[V,Z_p]\) as the global geodesics with data \((V,Z_p)\). Using (4.14) we find
Now we may write \(\gamma ^\varepsilon _{5D}[V,Z_p](U)=({\bar{U}}_\varepsilon ,\bar{V}_\varepsilon ,{\bar{Z}}_{p_\varepsilon })[V,Z_p](U)\) by using (3.7) as
To do so, explicitly we use the following abbreviations for the terms appearing on the r.h.s. of (3.7)
With this we find
Finally, we observe that the ‘data parts’ of the above equations in fully explicit form read
5 Analysis of the regularised transformation
In this section we finally establish that the geometrically regularised transformation \((T_\varepsilon )_\varepsilon \) is a representative of a generalised diffeomorphism \(T=[(T_\varepsilon )_\varepsilon ]\) in the sense of nonlinear distributional geometry and thus give a precise mathematical meaning to the physical equivalence of the distributional and the continuous form of the metric.
The main issue here is of course the subtle interplay between the image of \(T_\varepsilon \) and the domain of the inverse. In particular, we have to make sure that the intersection of all images \(\cap _{\varepsilon >0}\, \textrm{im}T_\varepsilon \) contains an open set, which can act as the domain of the inverse. More precisely, we use the following definition.
Definition 5.1
(Generalised diffeomorphism) Let \(\Omega \subseteq \mathbb {R}^n\) be open. We call \(T\in {\mathcal {G}}[\Omega ,\mathbb {R}^n]\) a generalised diffeomorphism if there exists \(\eta >0\) such that
-
(i)
There exists a representative \((t_\varepsilon )_\varepsilon \) of T such that \(t_\varepsilon :\Omega \rightarrow t_\varepsilon (\Omega )=:\tilde{\Omega }_\varepsilon \) is a diffeomorphism for all \(\varepsilon \le \eta \) and there exists \(\tilde{\Omega }\subseteq \mathbb {R}^n\) open with \(\tilde{\Omega }\subseteq \bigcap _{\varepsilon \le \eta }\tilde{\Omega }_\varepsilon \).
-
(ii)
The inverses \((t_\varepsilon ^{-1})_\varepsilon \) are moderate and c-bounded, i.e. \((t_\varepsilon ^{-1})_\varepsilon \in {\mathcal {G}}[\tilde{\Omega },\mathbb {R}^n]\) and there exists \(\Omega _1\subseteq \mathbb {R}^n\) open, \(\Omega _1\subseteq \bigcap _{\varepsilon \le \eta }t_\varepsilon ^{-1}(\tilde{\Omega })\).
-
(iii)
Setting \(T^{-1}:=[(t_\varepsilon ^{-1}|_{\tilde{\Omega }})_\varepsilon ]\), the compositions \(T\circ T^{-1}\) and \(T^{-1}\circ T|_{\Omega _1}\) are elements of \({\mathcal {G}}(\tilde{\Omega },\mathbb {R}^n)\) respectively \({\mathcal {G}}(\Omega _1, \mathbb {R}^n)\). (It is then clear that \(T\circ T^{-1} = id_{\tilde{\Omega }}\) and \(T^{-1}\circ T|_{\Omega _1} = id_{\Omega _1})\).
This definition, of course, extends the smooth theory, cf. [1, Supplement 2.5A] for a version ‘quantifying’ the neighbourhoods in the classical inverse function theorem.
We will show that T is a generalised diffeomorphism and we will split up this task in two subsections.
5.1 T as a generalised function
To begin with, we have to establish that the regularised transformation \(T_\varepsilon \) gives rise to a c-bounded generalised function on \(\mathbb {R}^5\), more precisely that \([(T_\varepsilon )_\varepsilon ]\in {\mathcal {G}}[\mathbb {R}^5,\mathbb {R}^5]\). Recall that by (4.15) we have \(T_\varepsilon (U,V,Z_p)=\gamma ^\varepsilon _{5D}[V,Z_p](U)\) and that so far we have only considered \(\gamma ^\varepsilon _{5D}\) as a function of U. Indeed, Theorem 3.1 guarantees that \([(\gamma ^\varepsilon _{5D})_\varepsilon ]\in {\mathcal {G}}[\mathbb {R},\mathbb {R}^5]\), but now we have to additionally deal with the dependence of \(\gamma ^\varepsilon _{5D}[V,Z_p](U)\) on V and \(Z_p\).
We first establish an appropriate ‘uniformity of domains’ of \(\gamma ^\varepsilon _{5D}\) in \((V,Z_p)\). To this end we have to delve into the fixed point argument of [43, Sec. III A] that leads to the construction of a local solution candidate for the geodesic equation. Recall from there or observe from (3.6) that the V-equation decouples from the system and can simply be integrated after the rest of the system has been solved. So, we only have to consider the existence statement [43, Prop. 3.2] which guarantees a local solution for small \(\varepsilon \) of a model system which neglects the V-equation. There the existence of unique solutions is established on the interval \([\alpha _\varepsilon ,\alpha _\varepsilon +\eta ]\) when \(\varepsilon \le \varepsilon _0\), where \(\varepsilon _0\) and \(\eta \) have to satisfy the explicit bounds given in equations [43, (29), (30)] and the unnumbered equation on top of p. 9, respectively. These are explicit bounds in terms of the coefficient functions of the system (local \(L^\infty \)-norms of H and DH, as well as the \(L^1\)-norm of \(\rho \) and \(\rho '\)) and the seed data. The latter in our case simplifies to the \(Z_p\)-components of
cf. (4.14). By inspection it becomes obvious that these estimates can be maintained if the seed data (there \(x^0\) and \(\dot{x}^0\)) vary in a neighbourhood (here of \(Z_p\)) and that hence \(\eta \) and \(\varepsilon _0\) can be chosen uniformly on compact neighbourhoods of \(Z_p\). Observing that for \(\alpha _\varepsilon +\eta \ge \beta _\varepsilon \) the solution again reduces to a background geodesic and using a simple exhaustion argument as in [10, Prop. 4.3] we obtain the following result.
Lemma 5.2
(Uniform domains). Given any compact set K in \(\mathbb {R}^4\) there is \(\varepsilon _0(K)\) such that \(\gamma ^\varepsilon _{5D}[V,Z_p]\) is the unique globally defined geodesic of (4.15) for all data \((V,Z_p)\in K\) and for all \(\varepsilon \le \varepsilon _0(K)\).
Next we deal with the c-boundedness of \(\gamma ^\varepsilon _{5D}[V,Z_p]\). Observe that c-boundedness as a function of U is already provided by Theorem 3.1, essentially proved in [45, Prop. 4.1 and Appendix A]. We now have to see that \(\gamma ^\varepsilon _{5D}\) is also uniformly bounded if we vary V and \(Z_p\) in a compact set. This, however, can also be accomplished by an inspection. For the \(Z_p\)-components we have to again look into the fixed point argument, more precisely to [45, Appendix A]. The constant \(C_2\) of [45, (A.6)] that bounds the solutions again depends on the coefficient functions of the system and the seed data. It clearly can be chosen uniform on compact neighbourhoods of the data, that is of \(Z_p\) as the U-speed (there \(\dot{u}^0\)) in our case is anyways fixed to 1. So, we obtain uniform boundedness of \({\bar{U}}_\varepsilon \), and \({\bar{Z}}_{p\varepsilon }\) on compact subsets, as well as of the derivatives \(\dot{{\bar{U}}}_\varepsilon =\partial _U{\bar{U}}_\varepsilon \), and \(\dot{{\bar{Z}}}_{p\varepsilon }=\partial _U{\bar{Z}}_{p\varepsilon }\). Finally, for the V-component we have to inspect the boundedness result in [45, Prop. 4.1(iii)]. Again it is easily seen that the constants in [45, (4.1)] vary uniformly if \((V,Z_p)\) vary in a compact set. In total we have established the following ‘uniformity of bounds’ result.
Lemma 5.3
(Uniform bounds). The global geodesics \(\gamma ^\varepsilon _{5D}[V,Z_p]\) of (4.15) are uniformly bounded on compact subsets of \(\mathbb {R}^5\) for \(\varepsilon \) small enough. In addition, such bounds also apply to \(\partial _U{\bar{U}}_\varepsilon \), and \(\partial _U{\bar{Z}}_{p\varepsilon }\).
The final task in this subsection is to establish moderateness. We first derive a number of asymptotic estimates which we will also need later on.
Lemma 5.4
Denoting by \(\nabla \) any of the derivatives \(\partial _V\) and \(\partial _{Z_p}\), we have in the regularisation strip \(-\varepsilon \le r\le \beta _\varepsilon \) and \((V,Z_p)\) varying in a compact set
Proof
The estimates (5.2) follow direct from the definitions (4.20)–(4.22) observing the boundedness results of Lemma 5.3. Similarly, we obtain
where we have omitted to write out the arguments of H, \(\delta _\varepsilon \) and the components of \(\gamma ^\varepsilon _{5D}[V,Z_p]\) explicitly. The result on \(\nabla {\tilde{G}}_\varepsilon \) simply follows in a similar vein. Finally, to derive the estimate on \(\Delta _\varepsilon \) first observe that
Now the result again follows along the same lines. \(\square \)
The next step is to apply Lemma 5.4 to obtain estimates on the first order derivatives of \({\bar{U}}_\varepsilon \), \(\dot{{\bar{U}}}_\varepsilon \), \({\bar{Z}}_{p\varepsilon }\), and \(\dot{{\bar{Z}}}_{p\varepsilon }\). More precisely, we have.
Lemma 5.5
(Asymptotic estimates on the first order derivatives). We have in the regularisation strip \(-\varepsilon \le r\le \beta _\varepsilon \) and for \((V,Z_p)\) varying in a compact set
as well as
Proof
Since here the \(\partial _V\)- and \(\partial _{Z_p}\)-derivatives will part ways, we introduce the following notation: First we do not distinguish between the individual \(\partial _{Z_p}\)’s (\(p=1,2,3\)) and simply write \(\partial _Z\).Footnote 9 Moreover, we will write \(\nabla =(\nabla _1,\nabla _2)=(\partial _V,\partial _Z)\) and also use the notation \(\nabla _A\) (\(A=1,2\)).
We aim for a Gronwall estimate using the integral representation of the respective components of the geodesics (4.23), (4.25), and (4.26). However, we will do so in a nested way starting with \(\nabla {\bar{U}}_\varepsilon \), \(\nabla \dot{{\bar{U}}}_\varepsilon \), and \(\nabla {\bar{Z}}_{p\varepsilon }\), while leaving \(\nabla \dot{{\bar{Z}}}_{p\varepsilon }\) for later treatment. Setting
we obtain from (4.23) and from (5.3), (5.5)
Similarly, using (4.25), (4.26) we obtain by a lengthy calculation
Summing up we therefore have
and a first appeal to the Gronwall inequality gives
Next we turn to \(\nabla \dot{{\bar{Z}}}_{p\varepsilon }\) for which we find, again from (4.25), (4.26), and (5.3), (5.5)
where in both lines the second equality follows from (5.19). Now a second appeal to the Gronwall inequality hence leaves us with
which already gives the claim on \(\nabla \dot{{\bar{Z}}}_{p\varepsilon }\). Also, it allows us to improve the estimates (5.19) on \(\Psi _A\) to
which upon inserting into (5.13)–(5.16) gives the claims on \(\partial {\bar{U}}_\varepsilon \), \(\partial \dot{{\bar{U}}}_\varepsilon \), and \(\partial {\bar{Z}}_\varepsilon \). Finally, we insert these estimates into (5.3) and (5.5) to obtain (5.11). \(\square \)
Lemma 5.6
(Asymptotic estimates on the higher order derivatives). Denoting by \(\nabla \) any of the derivatives \(\partial _V\) and \(\partial _{Z_p}\) we have in the regularisation strip \(-\varepsilon \le r\le \beta _\varepsilon \) and \((V,Z_p)\) varying in a compact set that for any n there is N such that
Proof
We proceed by induction. Clearly Lemma 5.5 provides the basis of induction. So, assume that we have \(\nabla ^n({\bar{U}}_\varepsilon , \dot{{\bar{U}}}_\varepsilon ,{\bar{Z}}_{p\varepsilon }, \dot{\bar{Z}}_{p\varepsilon })=O(\varepsilon ^{-M})\) for some M. We again aim for a nested Gronwall argument for the highest order derivatives. Staring with \({\bar{U}}_\varepsilon \), and \(\dot{{\bar{U}}}_\varepsilon \), we find using the integral representation (4.23)
where we have only retained the highest order terms explicitly and estimated all lower order terms by some large inverse power of \(\varepsilon \). Next we deal with the term \(\nabla ^{n+1}{\bar{Z}}_{p\varepsilon }\) for which we find from (4.25), and (4.26)
simply collecting all lower order terms in the final \(O(\varepsilon ^{-N})\)-estimate. Observe that the (critical) term involving \(\delta _\varepsilon ({\bar{U}}_\varepsilon )\) does not produce any (high) inverse powers of \(\varepsilon \) in the highest order terms \(\nabla ^{n+1}(\bar{U}_{\varepsilon },\dot{{\bar{U}}}_{\varepsilon },{\bar{Z}}_{p\varepsilon })\).
Now we set \(\Psi =\max (|\nabla ^{n+1}\bar{U}_{\varepsilon }|,|\nabla ^{n+1}\dot{{\bar{U}}}_{\varepsilon }|,|\nabla ^{n+1}\bar{Z}_{p\varepsilon }|)\) and obtain by collecting the above estimates
and so by a first application of Gronwall’s inequality
Next we use the integral representations to obtain the following estimate on the \((n+1)\)-st derivative of the fraction \(\Delta _\varepsilon /N_\varepsilon \)
where we have used the estimates (5.28), (5.29). So, another appeal to Gronwall’s inequality yields
Inserting this back into the \(\Psi \)-estimate (5.29), we find
Finally, we turn to the term \(\nabla ^{n+1}\dot{{\bar{Z}}}_{p\varepsilon }\), for which we find again from the integral representation (4.25), and (4.26) (cf. (5.27))
where we have used (5.32) as well as (5.31). So, a final appeal to Gronwall’s estimate gives \( \nabla ^{n+1}\dot{{\bar{Z}}}_{p\varepsilon }=O(\varepsilon ^{-N})\), and, upon inserting into (5.32), \(\Psi =O(\varepsilon ^{-N})\), which is the claim. \(\square \)
Now we finally obtain moderateness of the transformation. Indeed, we have the following more specific result.
Proposition 5.7
(Moderateness of the transformation). The net of transformations \((T_\varepsilon )_\varepsilon \) is moderate and hence \([(T_\varepsilon )_\varepsilon ]\) is an element of \({\mathcal {G}}[\mathbb {R}^5,\mathbb {R}^5]\).
Proof
Recall that we only have to argue inside the regularised wave zone \(-\varepsilon \le {\bar{U}}_\varepsilon \le \beta _\varepsilon \) since outside of it \(\gamma ^\varepsilon _{5D}\) coincides with classical smooth solutions (depending smoothly on \(\varepsilon \)). The c-boundedness (in this strip) was established in Lemma 5.3 and the moderateness estimates for \(\partial _U\gamma ^\varepsilon _{5D}[V,Z_p](.)\) are due to Theorem 3.1. The moderateness estimates for the V- and \(Z_q\)-derivatives of \({\bar{U}}_\varepsilon \), and \({\bar{Z}}_{p\varepsilon }\), as well as their mixed V-\(Z_q\)-derivatives, have been established in Lemma 5.6. The mixed U-V-\(Z_q\)-derivatives follow suit by iteratively using the differential equation.Footnote 10
Finally, since the V-equation is decoupled from the system and \({\bar{V}}[V,Z_p](.)\) is obtained simply by integration of the other components its moderateness is a consequence of moderateness of \(({\bar{U}},{\bar{Z}}_p)\) (and the well-definedness of the respective operations in \({\mathcal {G}}[\mathbb {R}^n,\mathbb {R}^m]\)). \(\square \)
5.2 T as generalised diffeomorphism
We will now set out to show that the transformation (4.15), i.e.
with its components given explicitly by (4.23)–(4.26) gives rise to a locally invertible generalised function \(T=[(T_\varepsilon )_\varepsilon ]\) on some open set containing the impulsive surface. Hence, we will call it a generalised diffeomorphism or generalised coordinate transformation. To do so we will extend the results of the \(\Lambda =0\)-case of [20] and, in particular, its more mathematically structured presentation in [10]. In fact, inspired by [10] we will decompose the transformation in a convenient way by splitting \(T_\varepsilon \) into a ‘singular’ and a ‘convergent’ part.
To begin with, fix an open, relatively compact set \(W\subseteq \mathbb {R}^5\), which will be specified further later, and observe that by Proposition 5.7\((T_\varepsilon )\) is moderate and c-bounded and therefore indeed \(T:=[(T_\varepsilon )_\varepsilon ]\in {\mathcal {G}}[W,\mathbb {R}^n]\). We decompose the \({\bar{V}}_\varepsilon \)-component into the initial data term \(\tilde{V}_\varepsilon \) and the integral term, which we label as \(h_\varepsilon \), so that we may write
To be precise, we have
Note that while \(h_\varepsilon \) does not converge, we have that \(h_\varepsilon =O(1)\), cf. the proof of Proposition 4.1 in [45] and in particular equations (4.3) and (4.4). At this point we define the converging sequence \(s_\varepsilon (U,V,Z):=({\bar{U}}_\varepsilon , {\tilde{V}}_\varepsilon , {\bar{Z}}_{i\varepsilon },{\bar{Z}}_{4\varepsilon })\).
We will use [9, Prop. 3.16 and Thm. 3.59] in order to establish injectivity of \(T_\varepsilon \), and therefore, we need to find the asymptotic behaviour of \(DT_\varepsilon \) and \(Ds_\varepsilon \). More specifically, we need to estimate the behaviour of their determinant and all principal minors. The Jacobian of \(s_\varepsilon \) is
where B is a matrix with all entries \(O(\varepsilon )\), as we will see in Lemma 5.9 below. For the following we denote
Lemma 5.8
There is \(\varepsilon _0>0\) such that on any closed rectangular subset of \(\Omega \) and for all \(\varepsilon < \varepsilon _0\), \(s_\varepsilon \) is injective.
Proof
For \(\varepsilon \) small enough we only have to consider the matrix \(Ds_\varepsilon -B\). Condition (5.36) guarantees that all principal minors are bounded below by a fixed positive constant on all of \(\Omega \). Thus, [11, Thm. 4] gives the claimed injectivity. \(\square \)
Outside the regularisation strip \(\{\alpha _\varepsilon \le U \le \beta _\varepsilon \}\) the transformation defaults to a smooth coordinate transform independent of \(\varepsilon \) and hence possesses all the properties needed in the following arguments. Thus, we may restrict ourselves to the regularisation zone and there \({\bar{U}}_\varepsilon = O(\varepsilon )\) holds. As for \(T_\varepsilon \), being able to decompose its V component into \({\tilde{V}}_\varepsilon + h_\varepsilon \) lets us more easily compute its Jacobian. First, we focus on the regularisation strip \(\{\alpha _\varepsilon \le U \le \beta _\varepsilon \}\):
Lemma 5.9
(Asymptotics estimates for \({\bar{V}}_\varepsilon \)). We have in the regularisation strip \(-\varepsilon \le r\le \beta _\varepsilon \) and \((V,Z_p)\) varying in a compact set
Proof
The asymptotics of \({\bar{V}}_\varepsilon \) have already been noted in Proposition 5.7. We estimate the V-component: As \(h_\varepsilon \) consists of three integrals, we split up the calculation, writing \(h_\varepsilon = \frac{1}{2}I_1+I_2-I_3\). Then using the above we obtain that
Similarly, we obtain that
For the last term we need to be more careful. First we calculate
Consequently, we get that \(\partial _V h_\varepsilon = O(\varepsilon )\) and so \(\partial _V {\bar{V}}_\varepsilon = O(1)\) as the V-derivative of the initial conditions for the V-component is O(1). \(\square \)
At this point we observe that
where the \(\tilde{Z}_{q\varepsilon }\) are the \(\bar{Z}_{q\varepsilon }\) without the initial conditions, \({\tilde{B}}\) comes from B in (5.36) and the additional \(\partial _V h_\varepsilon \)-, \(\partial _V \bar{Z}_{q\varepsilon }\)-, \(\partial _{Z_p} \bar{Z}_{q\varepsilon }\)-terms are all \(O(\varepsilon )\) by Lemma 5.9. Furthermore, the (1, 2)-entry of \({\tilde{B}}\), which is \(\partial _V \bar{U}_\varepsilon \) is even \(O(\varepsilon ^2)\) (by Lemma 5.9), which is essential in what follows. Thus, when calculating all the principal minors of \(DT_\varepsilon \) we need to observe that
-
1.
the factor \(\partial _U h_\varepsilon \), which is \(O\left( \frac{1}{\varepsilon }\right) \), is always multiplied by an \(O(\varepsilon ^2)\)-term,
-
2.
the factors \(\partial _U \tilde{Z}_{q\varepsilon }\), which are O(1), are always multiplied by an \(O(\varepsilon )\)-term, and
-
3.
the factors \(\partial _{Z_p} h_\varepsilon \), which are O(1) by Lemma 5.9, are always multiplied by an \(O(\varepsilon )\)-term.
Thus, all the principal minors are of the form \(1 + O(\varepsilon )\), and hence, in particular, \(|\det (DT_\varepsilon )|\ge \varepsilon ^N\) for some \(N\in \mathbb {N}\). Consequently, \((T_\varepsilon ^{-1})_\varepsilon \) is moderate, and from \(T_\varepsilon ^{-1} \circ T_\varepsilon = \textrm{id}\) we conclude that \(T_\varepsilon ^{-1}\) is c-bounded (on the image of \(T_\varepsilon \)).
In conclusion, this gives that \(T=[(T_\varepsilon )_\varepsilon )]\) is a generalised diffeomorphism. We are, however, interested in the overall transformation (4.13), i.e. the precomposition of T with (2.9) and the postcomposition with (4.12). Since they both are (classical) smooth diffeomorphisms on their respective domains, we only need to observe that such a composition clearly is a generalised diffeomorphism. So in total we have:
Theorem 5.10
The discontinuous coordinate transform (4.13) is a generalised diffeomorphism.
6 Discussion
In this work we have studied the notorious discontinuous coordinate transformation (2.5) relating the distributional and the continuous metric commonly used to describe nonexpanding impulsive gravitational waves propagating in (anti-)de Sitter space. Already in [39] it was shown that this transformation is geometrically given by the null generators of the (A)dS hyperboloid in a 5D-description, which jump and are refracted due to the wave impulse. Here we have put this formal analysis on firm mathematical grounds using the nonlinear distributional analysis of the geodesics in these geometries provided in [44, 45]. More precisely, we have established that a careful geometric regularisation of the transformation leads to a generalised diffeomorphism in the sense of nonlinear distributional geometry. In this way we have also generalised the analysis of the far simpler \(\Lambda =0\)-case of [21]. We have schematically displayed our procedure in Fig. 3.

Schematics of the transformations and regularisations employed in this work
Physically speaking, our approach consists in viewing the impulsive wave as a limiting case of a sandwich wave, where we have used the 5D-formalism to define at a sensible regularisation of the spacetime, i.e. as the (A)dS hyperboloid in a 5D flat sandwich wave. From this point of view, the two forms of the impulsive metric arise as the (distributional) limits of this sandwich wave in different coordinate systems, once in the 4D-‘continuous system’ (u, v, Z), where the metric is (2.2) and the 4D-‘distributional system’ \((\mathcal {U},\mathcal {V},\eta )\), where the metric is (2.1).
Data availability statement
Not applicable to this article because it is based on purely theoretical considerations, without using any datasets or other materials.
Notes
Observe that—although not stressed in the original works—especially the completeness result is remarkable, since it proves that the analytically ‘very singular’ distributional spacetime is nonsingular in view of the standard definition [18].
Smooth dependence on the parameter renders the theory technically more pleasant but was not assumed in earlier references, for details see [5, Section 1].
Where we have already set \(c=1\), see item (3) in [39, Subsec. III.B].
Here we use the relations \({\Lambda =3\sigma /a^2}\) and \({(x_0)^2+(y_0)^2=4\sigma a^2(\alpha -1)}\).
As explained in [38, p. 3], the geodesic equations in the 4D-form are even wilder and a direct approach seems to be out of reach.
Observe that (2.9) literally transforms the conformally flat coordinates \(({\mathcal {U},\mathcal {V},\eta })\) to the 5D-coordinates. But here we transform data ‘in front’ of the wave, where \(({\mathcal {U},\mathcal {V},\eta })\) are trivially related to (u, v, Z), cf. (2.4) and so in (2.9) we have to replace \(({\mathcal {U},\mathcal {V},\eta })\) with (u, v, Z).
We here write the regularisation parameter as a superscript rather than as a subscript to make the notation more appealing.
In what follows we will estimate the Z-derivatives of the data-term in (4.25) simply by O(1), ignoring the fact that \(\partial _{Z_i}{\bar{Z}}_{j\varepsilon }\) actually gives a term of the form \(O(1)\delta _{ij} \).
Observe that it was precisely the tricky point in the proofs above that one cannot use the differential equation beyond the integral representation when estimating the V-\(Z_q\)-derivatives.
References
Abraham, R., Marsden, J.E., Ratiu, T.: Manifolds, Tensor Analysis, and Applications, volume 75 of Applied Mathematical Sciences, 2nd edn. Springer, New York (1988)
Aichelburg, C., Peter, Balasin, H.: Generalized symmetries of impulsive gravitational waves. Class. Quant. Grav. 14, A31–A41 (1997)
Aichelburg, P.C., Sexl, R.U.: On the gravitational field of a massless particle. Gen. Rel. Grav. 2, 303–312 (1971)
Barrabès, C., Hogan, P.A.: Singular Null Hypersurfaces in General Relativity. World Scientific Publishing Co., Inc., River Edge (2003)
Burtscher, A., Kunzinger, M.: Algebras of generalized functions with smooth parameter dependence. Proc. Edinb. Math. Soc. (2) 55(1), 105–124 (2012)
Chruściel, P.T., Grant, J.D.E.: On Lorentzian causality with continuous metrics. Class. Quant. Grav. 29(14), 145001, 32, (2012)
Colombeau, J.F.: Elementary Introduction to New Generalized Functions. North Holland, Amsterdam (1985)
de Rham, G.: Differentiable Manifolds, volume 266 of Grundlehren der Mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences]. Springer, Berlin (1984). Forms, currents, harmonic forms, Translated from the French by F. R. Smith, With an introduction by S. S. Chern
Erlacher, E.: Local existence results in algebras of generalised functions. PhD thesis, University of Vienna, (2007). https://www.mat.univie.ac.at/~diana/papers/dissertation_erlacher.pdf
Erlacher, E., Grosser, M.: Inversion of a ‘discontinuous coordinate transformation’ in general relativity. Appl. Anal. 90(11), 1707–1728 (2011)
Gale, D., Nikaidô, H.: The Jacobian matrix and global univalence of mappings. Math. Ann. 159, 81–93 (1965)
Geroch, R., Traschen, J.: Strings and other distributional sources in general relativity. Phys. Rev. D 36(4), 1017–1031 (1987)
Graf, M., Grant, J.D.E., Kunzinger, M., Steinbauer, R.: The Hawking–Penrose singularity theorem for \(C^{1,1}\)-Lorentzian metrics. Commun. Math. Phys. 360(3), 1009–1042 (2018)
Grant, J.D.E., Kunzinger, M., Sämann, C., Steinbauer, R.: The future is not always open. Lett. Math. Phys. 110(1), 83–103 (2020)
Griffiths, J.B., Podolský, J.: Exact Space-Times in Einstein’s General Relativity. Cambridge University Press, Cambridge (2009)
Grosser, M., Kunzinger, M., Oberguggenberger, M., Steinbauer, R.: Geometric Theory of Generalized Functions with Applications to General Relativity. Mathematics and Its Applications, vol. 537. Kluwer Academic Publishers, Dordrecht (2001)
Hartman, P., Wintner, A.: On the problems of geodesics in the small. Am. J. Math. 73, 132–148 (1951)
Hawking, S.W., Ellis, G.F.R.: The Large Scale Structure of Space-Time. Cambridge Monographs on Mathematical Physics, No. 1. Cambridge University Press, London (1973)
Hotta, M., Tanaka, M.: Shock wave geometry with nonvanishing cosmological constant. Class. Quant. Grav. 10, 307–314 (1993)
Kunzinger, M., Steinbauer, R.: A note on the Penrose junction conditions. Class. Quant. Grav. 16, 1255–1264 (1999)
Kunzinger, M., Steinbauer, R.: A rigorous solution concept for geodesic and geodesic deviation equations in impulsive gravitational waves. J. Math. Phys. 40(3), 1479–1489 (1999)
Kunzinger, M., Steinbauer, R.: Foundations of a nonlinear distributional geometry. Acta Appl. Math. 71(2), 179–206 (2002)
Kunzinger, M., Steinbauer, R.: Generalized pseudo-Riemannian geometry. Trans. Am. Math. Soc. 354(10), 4179–4199 (2002)
Kunzinger, M., Steinbauer, R., Stojković, M.: The exponential map of a \(C^{1,1}\)-metric. Differ. Geom. Appl. 34, 14–24 (2014)
Kunzinger, M., Steinbauer, R., Stojković, M., Vickers, J.A.: A regularisation approach to causality theory for \(C^{1,1}\)-Lorentzian metrics. Gen. Rel. Grav., 46(8), 1738, 18, (2014)
Lange, C., Lytchak, A., Sämann, C.: Lorentz meets Lipschitz. Adv. Theor. Math. Phys. 25(8), 2141–2170 (2021)
LeFloch, P.G., Mardare, C.: Definition and stability of Lorentzian manifolds with distributional curvature. Port. Math. (N.S.) 64(4), 535–573 (2007)
Marsden, J.E.: Generalized Hamiltonian mechanics: A mathematical exposition of non-smooth dynamical systems and classical Hamiltonian mechanics. Arch. Rational Mech. Anal. 28, 323–361 (1967/1968)
Minguzzi, E.: Convex neighborhoods for Lipschitz connections and sprays. Monatsh. Math. 177(4), 569–625 (2015)
Minguzzi, E.: Causality theory for closed cone structures with applications. Rev. Math. Phys. 31(5), 930001, 139 (2019)
Penrose, R.: The geometry of impulsive gravitational waves. In: General Relativity (Papers in Honour of J. L. Synge), pp. 101–115. Clarendon Press, Oxford (1972)
Podolský, J.: Non-expanding impulsive gravitational waves. Class. Quant. Grav. 15(10), 3229–3239 (1998)
Podolský, J.: Exact impulsive gravitational waves in space-times of constant curvature. In: Gravitation: Following the Prague Inspiration, pp. 205–246. World Scientific Publishing Co., Singapore (2002)
Podolský, J., Griffiths, J.B.: Impulsive waves in de Sitter and anti-de Sitter spacetimes generated by null particles with an arbitrary multipole structure. Class. Quant. Grav. 15(2), 453–463 (1998)
Podolský, J., Griffiths, J.B.: Nonexpanding impulsive gravitational waves with an arbitrary cosmological constant. Phys. Lett. A 261(1–2), 1–4 (1999)
Podolský, J., Ortaggio, M.: Symmetries and geodesics in (anti-) de Sitter spacetimes with non-expanding impulsive waves. Class. Quant. Grav. 18(14), 2689–2706 (2001)
Podolský, J., Sämann, C., Steinbauer, R., Švarc, R.: The global existence, uniqueness and \({C}^1\)-regularity of geodesics in nonexpanding impulsive gravitational waves. Class. Quant. Grav., 32(2), 025003, 23 (2015)
Podolský, R., Sämann, C., Steinbauer, R., Švarc, R.: The global uniqueness and \(C^1\)-regularity of geodesics in expanding impulsive gravitational waves. Class. Quant. Grav. 33(19), 195010, 23 (2016)
Podolský, J., Sämann, C., Steinbauer, R., Švarc, R.: Cut-and-paste for impulsive gravitational waves with \(\Lambda \): the geometric picture. Phys. Rev. D 100(2), 024040, 8 (2019)
Podolský, J., Steinbauer, R.: Penrose junction conditions with \(\Lambda \): geometric insights into low-regularity metrics for impulsive gravitational waves. Gen. Relativ. Gravit. 54(9):Paper No. 96, 24 (2022)
Podolský, J., Veselý, K.: Continuous coordinates for all impulsive pp-waves. Phys. Lett. A 241, 145–147 (1998)
Sämann, C., Steinbauer, R.: Geodesic completeness of generalized space-times. In: Pseudo-Differential Operators and Generalized Functions, volume 245 of Operator Theory: Advances and Applications, pp. 243–253. Birkhäuser/Springer, Cham (2015)
Sämann, C., Steinbauer, R.: Geodesics in nonexpanding impulsive gravitational waves with \(\Lambda \). II. J. Math. Phys. 58(11), 112503, 18 (2017)
Sämann, C., Steinbauer, R.: On geodesics in low regularity. J. Phys. Conf. Ser. 968, 012010, 14 (2018)
Sämann, C., Steinbauer, R., Lecke, A., Podolský, J.: Geodesics in nonexpanding impulsive gravitational waves with \(\Lambda \), part I. Class. Quant. Grav. 33(11), 115002, 33 (2016)
Shore, G.M.: Memory, Penrose limits and the geometry of gravitational shockwaves and gyratons. J. High Energy Phys. 2018(12), 133 (2018)
Steinbauer, R.: On the geometry of impulsive gravitational waves (1998) arXiv:9809054 [gr-qc]
Steinbauer, R.: A note on distributional semi-Riemannian geometry. Novi Sad J. Math. 38(3), 189–199 (2008)
Steinbauer, R.: Every Lipschitz metric has \(C^1\)-geodesics. Class. Quant. Grav. 31(5), 057001, 3 (2014)
Steinbauer, R., Vickers, J.A.: On the Geroch–Traschen class of metrics. Class. Quant. Grav. 26(6), 065001, 19 (2009)
Acknowledgements
The authors want to thank Jiří Podolský for constantly sharing his expertise. C.S., B.S., and R.S. acknowledge the kind hospitality of the Erwin Schrödinger International Institute for Mathematics and Physics (ESI) during the workshop Nonregular Spacetime Geometry, where parts of this research were carried out. This research was funded in part by the Austrian Science Fund (FWF) [Grant DOI 10.55776/P33594]. For open access purposes, the authors have applied a CC BY public copyright license to any author accepted manuscript version arising from this submission. C.S. is supported by the European Research Council (ERC), under the European’s Union Horizon 2020 research and innovation programme, via the ERC Starting Grant “CURVATURE”, grant agreement No. 802689. R.Š. acknowledges support from the Czech Science Foundation Grant No. GAČR 22-14791S.
Funding
Open access funding provided by University of Vienna.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author (R.S.) states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sämann, C., Schinnerl, B., Steinbauer, R. et al. Cut-and-paste for impulsive gravitational waves with \(\Lambda \): the mathematical analysis. Lett Math Phys 114, 58 (2024). https://doi.org/10.1007/s11005-024-01804-0
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11005-024-01804-0
Keywords
- Impulsive gravitational waves
- Nonlinear distributional geometry
- Discontinuous coordinate transformation