
Abstract
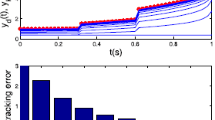
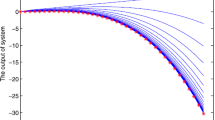
This paper presents a high-order \(\mathcal{D}^{\alpha}\)-type iterative learning control (ILC) scheme for a class of fractional-order nonlinear time-delay systems. First, a discrete system for \(\mathcal{D}^{\alpha}\)-type ILC is established by analyzing the control and learning processes, and the ILC design problem is then converted to a stabilization problem for this discrete system. Next, by introducing a suitable norm and using a generalized Gronwall–Bellman Lemma, the sufficiency condition for the robust convergence with respect to the bounded external disturbance of the control input and the tracking errors is obtained. Finally, the validity of the method is verified by a numerical example.



Similar content being viewed by others

References
Podlubny, I.: Fractional Differential Equations, pp. 12–18. Academic Press, New York (1999)
Hilfer, R.: Application of Fractional Calculus in Physics, pp. 22–24. World Scientific, Singapore (2000)
Monje, C.A., Chen, Y.Q., Vinagre, B.M., Xue, D.: Fractional-Order Systems and Controls: Fundamentals and Applications, pp. 431–438. Springer, New York (2010)
Li, Y., Chen, Y.Q., Ahn, H.S.: Fractional-order iterative learning control for fractional-order linear systems. Asian J. Control 13(1), 54–63 (2011)
Luo, Y., Chen, Y.Q.: Fractional order [proportional derivative] controller for a class of fractional order systems. Automatica 45, 2446–2450 (2009)
Krishna, B.T.: Studies on fractional order differentiators and integrators: a survey. Signal Process. 91, 386–426 (2011)
Lan, Y.H., Huang, H.X., Zhou, Y.: Observer-based robust control of 0≤α<1 fractional-order uncertain systems: a linear matrix inequality approach. IET Control Theory Appl. 6, 229–234 (2012)
Xu, J.X., Tan, Y.: Linear and Nonlinear Iterative Learning Control, pp. 47–51. Springer, Berlin (2003)
Ahn, H.S., Moore, K.L., Chen, Y.Q.: Iterative Learning Control: Robustness and Monotonic Convergence for Interval Systems, pp. 38–48. Springer, London (2007)
Hoelzle, D.J., Alleyne, A.G., Johnson, A.: Basis task approach to iterative learning control with applications to micro/robotic deposition. IEEE Trans. Control Syst. Technol. 19(5), 1138–1148 (2011)
Ruan, X., Bien, Z.Z., Wang, Q.: Convergence characteristics of proportional-type iterative learning control in the sense of Lebesgue norm. IET Control Theory Appl. 6, 707–714 (2012)
Chen, Y.Q., Moore, K.L.: On D α-type iterative learning control. In: Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, Florida, USA, pp. 32–37 (2001)
Lazarevic, M.P.: PD α-type iterative learning control for fractional LTI system. In: Proceedings of the 16th International Congress of Chemical and Process Engineering, Prague, Czech Republic, pp. 271–275 (2004)
Li, Y., Ahn, H.-S., Chen, Y.Q.: Iterative learning control of a class of fractional order nonlinear systems. In: 2010 IEEE International Symposium on Intelligent Control, Yokohama, Japan, pp. 779–783 (2010)
Sun, M., Wang, D., Wang, Y.: Varying-order iterative learning control against perturbed initial conditions. J. Franklin Inst. 347, 1526–1549 (2010)
Luo, Y., Chen, Y.Q., Pi, Y.G.: Dynamic high order periodic adaptive learning compensator for cogging effect in permanent magnet synchronous motor servo system. IET Control Theory Appl. 5, 669–680 (2011)
Diethelm, K., Ford, N.J.: Analysis of fractional differential equations. J. Math. Anal. Appl. 265, 229–248 (2002)
Deng, W.H.: Smoothness and stability of the solutions for nonlinear fractional differential equations. Nonlinear Anal. 72, 1768–1777 (2010)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of P.R. China (61104072, 10971173).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lan, YH., Zhou, Y. High-Order \(\mathcal{D}^{\alpha}\)-Type Iterative Learning Control for Fractional-Order Nonlinear Time-Delay Systems. J Optim Theory Appl 156, 153–166 (2013). https://doi.org/10.1007/s10957-012-0231-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-012-0231-2