
Abstract
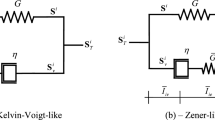
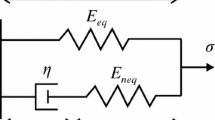
The rheological equation of a standard linear solid, i.e., the Zener model, is thermodynamically consistent. Thus, it was often used as a starting point for the development of nonlinear viscoelastic models, especially for elastomers. The basic idea of this paper is a generalization of the one-dimensional fractional constitutive equation of the Zener model to large strains. To reduce the number of material parameters of differential models based on the concept of the internal variables and to avoid integral constitutive equations, we develop a differential model based on the concept of dual stress and strain tensors and their derivatives. To this end, we select two couples of dual stress and strain tensors that have been used in finite elasticity. Then we obtain two constitutive models of incompressible isotropic materials called M1 and M2. We show that the M1 model is not suitable for describing the viscoelastic behavior of elastomers. To improve the predictions of the M2 model, we assume that the material is thixotropic. Therefore, the ratio of the relaxation and creep time depends on deformation. Experimental results show that this ratio may be represented as a function of the first invariant of the Cauchy–Green strain tensor. This yields a new constitutive equation whose material parameters were identified using experimental data on relaxation loadings in the literature. Next, we show that the model is able to predict the experimental data for combined loads of tension–torsion. Consequently, the model seems to be efficient at predicting the multiaxial visco-hyperelastic behavior of elastomers. The main advantage of the current model is that it has a differential form with relatively few parameters and is mathematically convenient.










Similar content being viewed by others
References
Locket F-J (1972) Nonlinear viscoelastic solids. Academic Press, London, pp 59–188
Drapaca C-S, Sivaloganathan S, Tenti G (2007) Nonlinear constitutive laws in viscoelasticity. Math Mech Solids 12:475–501
Wineman A (2009) Nonlinear viscoelastic solids. Math Mech Solids 14:300–366
Coleman B-D, Noll W (1961) Foundations of linear viscoelasticity. Rev Mod Phys 33:239–249
Holzapfel G-A, Simo J-C (1996) A new viscoelastic constitutive model for continuous media at finite thermomechanical changes. Int J Solids Struct 33:3019–3034
Lianis G (1963) Constitutive equations of viscoelastic solids under finite deformation. AA ES Report 63-110. Purdue University
Goldberg W, Lianis G (1968) Behavior of viscoelastic media under small sinusoidal oscillations superposed on finite strain. J Appl Mech ASME 35(3):433–440
Sullivan J-L, Morman K-N, Pett R-A (1980) A non-linear viscoelastic characterization of a natural rubber gum vulcanizate. Rubber Chem Technol 53:805–822
Morman K-N (1988) An adaptation of finite viscoelasticity theory for rubber-like viscoelasticity by use of a generalized strain measure. Rheol Acta 27:3–14
Fosdick R-L, Yu J-H (1998) Thermodynamics, stability and non-linear oscillations of a viscoelastic solids—2. History type solids. Int J Non-Linear Mech 33(1):165–188
Pipkin A-C, Rogers T-G (1968) A non-linear integral representation for viscoelastic behaviour. J Mech Phys Solids 16(1):59–72
Bernstein B, Kearlsey E-A, Zapas L-J (1963) A study of stress relaxation with finite-strain. Trans Soc Rheol 7:391–410
Petiteau J-C, Verrou E, Othman R, Le sourne H, Sigrist J-F, Barras G (2013) Large strain rate-dependent response of elastomers at different strain-rate: convolution integral vs. internal variable formulations. Mech Time-Depend Mater 17:349–367
Jaishankar A-J, McKinley G-H (2014) A fractional K-BKZ constitutive formulation for describing the nonlinear rheology of multiscale complex fluids. J Rheol 58(6):1751–1788
Chang W-V, Bloch R, Tschoegl N-W (1976) On the theory of the viscoelastic behavior of soft polymers in moderately large deformations. Rheol Acta 15:367–378
Sullivan J-L (1987) A non-linear viscoelastic model for representing nonfactorizable time-dependent behavior in cured rubber. J Rheol 31(3):271–295
Fatt M-S Hoo, Ouyang X (2007) Integral-based constitutive equation for rubber at high strain rates. Int J Solids Struct 44:6491–6506
Ciambella J, Paolone A, Vidoli S (2010) A comparison of nonlinear integral-based viscoelastic models through compression tests on filled rubber. Mech Mater 42:932–944
Christensen J-M (1980) A nonlinear theory of viscoelasticity for application to elastomers. J Appl Mech ASME 37:53–60
O’Dowd N-P, Knauss W-G (1995) Time dependent large principal deformation of polymers. J Mech Phys Solids 43:771–792
Rajagopal K-R, Srinivasa A-R (2013) An implicit thermomechanical theory based on a Gibbs potential formulation for describing the response of thermoviscoelastic solids. Int J Eng Sci 70:15–28
Haj-Ali R-M, Muliana A-H (2004) Numerical finite element formulation of the Schapery non linear viscoelastic material model. Int J Numer Methods Eng 59(1):25–45
Tschoegl N-W (1989) The phenomenological theory of linear viscoelastic behaviour. Springer, Heildelberg
Schiessel H, Blumen A (1993) Hierarchical analogues to fractional relaxation equations. J Phys Math Gen 26:5057–5069
Sidoroff F (1975) Variables internes en viscolasticit II. Milieux avec configuration intermdiaire. J Méc 14(4):571–595
Huber N, Tsakmakis C (2000) Finite deformation viscoelasticity laws. Mech Mater 32:1–18
Ward I-M, Sweeney J (2004) An introduction to the mechanical properties of solid polymers. Wiley, New York
Diani J, Brieu M, Gilormini P (2006) Observation and modeling of the anisotropic visco-hyperelastic behavior of a rubberlike material. Int J Solids Struct 43:3044–3056
Lion A (2001) Thermomechanically consistent formulations of the standard linear solid using fractional derivatives. Arch Mech 53(3):253–273
Bagley R-L, Torvik P-J (1986) On the fractional calculus model of viscoelastic behavior. J Rheol 30(1):133–155
Haupt P, Lion A, Backhauss E (2000) On the dynamic behaviour of polymers under finite strains: constitutive modelling and identification of parameters. Int J Solids Struct 37:3633–3646
Pritz T (2003) Five-parameter fractional derivative model for polymeric damping materials. J Sound Vib 265:935–952
Bechir H, Idjeri M (2011) Computation of the relaxation and creep functions of elastomers from harmonic shear modulus. Mech Time-Depend Mater 15:119–138
Haupt P, Lion A (2002) On finite linear viscoelasticity of incompressible isotropic materials. Acta Mech 159:87–124
Drozdov A-D (1997) Fractional differential models in finite viscoelasticity. Acta Mech 124:155–180
Adolfsson K, Enelund M (2003) Fractional derivative viscoelasticity at large deformations. Non-Linear Dyn 33:301–321
Johnson A-R, Quigley C-J (1992) A viscohyperelastic Maxwell model for rubber viscoelasticity. Rubber Chem Technol 65:137–153
Kim J-K, Kim K-S, Cho J-Y (1997) Viscoelastic model of finitely deforming rubber and its finite element analysis. J Appl Mech ASME 64:835–841
Lubliner J (1985) A model for rubber viscoelasticity. Mech Res Commun 12:93–99
Le Tallec P, Rahier C, Kaiss A (1993) A three-dimensional incompressible viscoelasticity in large strains: formulation and numerical approximation. Comput Methods Appl Mech Eng 109:233–258
Kaliske M, Rothert H (1997) Formulation and implementation of three-dimensional viscoelasticity at small and finite strains. Comput Mech 19:228–239
Miehe C, Keck J (2000) Superimposed finite elastic-viscoelastic-plastoelastic stress response with damage in filled rubbery polymers: Experiments, modeling and algorithmic implementation. J Mech Phys Solids 48:323–365
Reese S, Govindjee S (1998) A theory of finite viscoelasticity and numerical aspects. Int J Solids Struct 35:3455–3482
Laiarinandrasana L, Piques R, Robisson A (2003) Visco-hyperelastic model with internal state variable coupled with discontinuous damage concept under total Lagrangian formulation. Int J Plasticity 19:977–1000
Vidoli S, Sciarra G (2002) A model for crystal plasticity based on micro-slip descriptors. Contin Mech Thermodyn 14:425–435
Haupt P, Sedlan K (2001) Viscoplasticity of elastomeric materials. Experimental facts and constitutive modeling. Arch Appl Mech 71:89–109
Rendek M, Lion A (2010) Amplitude dependence of filler-reinforced rubber: experiments, constitutive modelling and FEM—implementation. Int J Solids Struct 47:2918–2936
Green M-S, Tobolsky A-V (1946) A new approach of the theory of relaxing polymeric media. J Chem Phys 14(2):80–92
Bergström J-S, Boyce M-C (1998) Constitutive modelling of the large strain-time dependent behavior of elastomers. J Mech Phys Solids 46:931–954
Reese S (2003) A micromechanically motivated material for the thermo-viscoelastic material behavior of rubber-like polymers. Int J Plasticity 19:909–940
Drozdov A-D, Dorfmann A (2003) A micro-mechanical model for the response of filled elastomers at finite strains. Int J Plasticity 19(7):1037–1067
Makradi A, Gregory R-V, Ahzi S, Edie D-D (2005) A two phase self-consistent model for the deformation and phase transformation behavior of polymers above the glass transition temperature: application to PET. Int J Plasticity 21:741–758
Argon A-S, Bulatov V-V, Mott P-H, Suter U-W (1995) Plastic deformation in glassy polymers by atomistic and mesoscopic simulations. J Rheol 39:377–399
Caputo M, Mainardi F (1971) Linear models of dissipation in anelastic solids. Riv Nuovo Cimento 1:161–198
Bagley R-L, Torvik P-J (1983) Fractional calculus a different approach to the analysis of viscoelastically damped structures. AIAA J 21:741–748
Welch S, Rorrer R, Duren R (1999) Application of time-based fractional calculus methods to viscoelastic creep and stress relaxation of materials. Mech Time-Depend Mater 3(3):279–303
Koeller R-C (1984) Applications of fractional calculus to the theory of viscoelasticity. J Appl Mech ASME 51:299–307
Padovan J (1987) Computational algoritms for FE formulations involving fractional operators. Comput Mech 2:271–287
Enelund M, Mähler L, Runesson B, Josefson B-M (1999) Formulation and integration of the standard linear viscoelastic solid with fractional order rate laws. Int J Solids Struct 36:2417–2442
Schmidt A, Gaul L (2002) Finite element formulation of viscoelastic constitutive equations using fractional time derivatives. Non-Linear Dyn 29:37–55
Yuan L, Agrawal O-P (2002) A numerical scheme for dynamic systems containing fractional derivatives. J Vib Acoust 124:321–324
Schmidt A, Gaul L (2006) On a critique of a numerical scheme for the calculation of fractionally damped dynamical systems. Mech Res Commun 33:99–107
Holzapfel G-A (2000) Nonlinear solids mechanics: a continuum approach for engineering. Wiley, Chichester, pp 212–290
Haupt P, Tsakmakis C (1989) On the application of dual variables in continuum mechanics. Contin Mech Thermodyn 1:165–196
Batra R-C (2001) Comparison of results from four linear constitutive relations in isotropic elasticity. Int J Non-Linear Mech 36:421–432
Ogden R-W (1997) Nonlinear elastic deformations. Dover Publications, New York
Hassani S, Alaoui Soulimani A, Ehrlacher A (1998) A nonlinear viscoelastic model: the pseudo-linear model. Eur J Mech A 17(4):567–598
Haupt P (2002) Continuum mechanics and theory of materials, 2nd edn. Springer, Berlin
Podlubny I (1999) Fractional differential equations. Academic Press, San Diego, pp 103–109, 223–242
Carpinteri A, Mainardi F (1997) Fractals and fractional calculus in continuum mechanics. Springer, Vienna
Hartmann S, Tschöpe T, Schreiber L, Haupt P (2003) Finite deformations of a carbone black-filled rubber. Experiment, optical measurement and material parameter identification using finite elements. Eur J Mech A 22:309–324
Charrier P, Dacorogna B, Hanouzet B, Laborde P (1988) An existence theorem for slightly compressible materials in nonlinear elasticity. SIAM J Math Anal 19:70–85
Goldberg W, Lianis G (1970) Stress relaxation in combined torsion–tension. J Appl Mech 37(1):53–60
Yuan H-L, Lianis G (1972) Experimental investigation of nonlinear viscoelasticity in combined finite torsion–tension. Trans Soc Rheol 16(4):615–633
Yuan H-L (1971) Static and dynamique experimental investigation of nonlinear isothermal viscoelasticity. PhD Thesis, Purdue University
Hartmann S (2001) Parameter estimation of hyperelasticity relations of generalized polynomial-type with constraint conditions. Int J Solids Struct 38(44–45):7999–8018
Bell J-F (1973) The experimental foundation of solid mechanics. In: Trusdell C (ed) Hundbuch der Physik, VIa/1. Springer, Berlin
Batra R-C, Yu J-H (1999) Linear constitutive relations in isotropic finite viscoelasticity. J Elasticity 55:73–77
Batra R-C (1998) Linear constitutive relations in isotropic finite elasticity. J Elasticity 51:243–245
Freed A, Diethelm K (2006) Fractional calculus in biomechanics: a 3D viscoelastic model using regularized fractional-derivative kernels with application to the human calcaneal fat pad. Biomech Model Mechanobiol 5:203–215
Lion A (1998) Thixotropic behaviour of rubber under dynamic loading histories: experiments and theory. J Mech Phys Solids 46(5):895–930
Ferry J-D (1980) Viscoelastic properties of polymers. Wiley, New York
Acknowledgments
The authors would like to thank the reviewers for their insightful comments that have significantly improved a preliminary version of this paper.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Resolution of fractional differential equation
The analytical solution of linear fractional differential equations (FDEs) with constant coefficients can be obtained using the Laplace transform technique.
In the case of relaxation, the Laplace transform formula for the Caputo fractional derivatives involves the value of the function f(t) at the lower terminal \(t=0\):
Let us consider the following FDE:
with the initial condition \({\mathbf {S}}(0)=0\).
Applying the Laplace transform to both sides of this equation, and using the linearity of the Laplace transform, we obtain the following result:
Then
where \({\hat{\mathbf {F}}}_1(p)\) and \({\hat{\mathbf {F}}}_2(p)\) denote the Laplace transforms of \(\partial {W}/\partial {\mathbf {E}(t)}\) and \(\xi ^{-1}(t){D}^\alpha {{\mathbf {e}}}(t)\).
The equation’s solution is
The solution in the time–space domain is obtained using the inverse Laplace transform, and we obtain
Application of the Laplace transform to the FDE, in the case of \(\xi \) equal to a constant, gives
We have
We obtain the solution as follows:
Appendix 2: Mittag–Leffler function
The function \(E_\alpha \), with \(\alpha >0\) defined by \(E_\alpha (z)=\sum _{k=0}^{\infty }z^k/\varGamma (\alpha k+1)\), is called the Mittag–Leffler function of order \(\alpha \). This function provides a simple generalization of the exponential function, i.e., \(E_1(z)=\mathrm {exp}(z)\).
When \(0<\alpha \le 1\), the Mittag–Leffler function on the negative axis is completely monotone and is capable of representing phenomena of relaxation. The graph of the function \(E_\alpha (-x^\alpha )\), with \(x=(t/\tau _\mathrm{R})\ge 0\), is illustrated in Fig. 11 for different values of \(\alpha \).

Mittag–Leffler function for different values of \(\alpha \)
Appendix 3: Lianis material functions for SBR circular bar at \(0\,^{\circ }\)C [73]
The Lianis constitutive equation for an isotropic incompressible viscoelastic material is given by
where a, b, c are constants corresponding to the equilibrium stress, and the \(\varphi _k(u)\) are relaxation functions that approach zero as \(u\rightarrow \infty \).
For a SBR at \(0\,^{\circ }\)C, the constants a, b, c were found to be \(a=29.5\) psi, \(b=0\), \(c=51.07\) psi, where 1 psi = \(6.8948 \times 10^3\) Pa, and the Lianis material functions were related by
The relaxation functions \(\varphi _k(t)\) are tabulated in Table 3.
Appendix 4: Tension–torsion of a circular cylinder
In cylindrical coordinates and for the extension–torsion of a solid circular cylinder made of an incompressible isotropic material, we have
The equation of equilibrium is given by
Equations (79)–(82), together with the constitutive equation of the proposed model, imply that
where the nonzero components of the Cauchy stress tensor are given by
where \(I_1({\mathbf {C}})=\lambda ^2+2\lambda ^{-1}+\lambda (\psi R)^2\).
Substituting (84) into (83), one obtains
We see that Eq. (90) implies that \({\partial } P/{\partial } \theta =0\) and Eq. (91) implies that \(\partial P/\partial z=0\). This means that P is independent of \(\theta \) and z and is a function of t and r only. Then (89) becomes
The integration of (92) leads to
We have
One can deduce from Eq. (93) that
According to Eqs. (85) and (86), one can write the following relations:
where
Thus, Eq. (95) gives
Substituting Eqs. (100) into (96), we can easily find the Lagrange multiplier, i.e., the pressure P(r, t), in terms of the material parameters \(\lambda (t)\) and \(\psi (t)\):
After calculations we obtain
Rights and permissions
About this article

Cite this article
Bouzidi, S., Bechir, H. & Brémand, F. Phenomenological isotropic visco-hyperelasticity: a differential model based on fractional derivatives. J Eng Math 99, 1–28 (2016). https://doi.org/10.1007/s10665-015-9818-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10665-015-9818-6