
Abstract
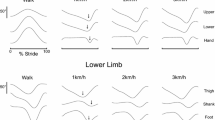
In animal walking, the gravitational potential and kinetic energy of the center of mass (COM) fluctuates out-of-phase to reduce the energetic cost of locomotion via an inverted pendulum mechanism, and, in canine quadrupedal walking, up to 70% of the mechanical energy can be recovered. However, the rate of energy recovery for quadrupedal walking in primates has been reported to be comparatively lower. The present study analyzed fluctuations in the potential and kinetic energy of the COM during quadrupedal walking in the Japanese macaque to clarify the mechanisms underlying this inefficient utilization of the inverted pendulum mechanism in primates. Monkeys walked on a wooden walkway at a self-selected speed, and ground reaction forces were measured, using a force platform, to calculate patterns of mechanical energy fluctuation and rates of energy recovery. Our results demonstrated that rates of energy recovery for quadrupedal walking in Japanese macaques were approximately 30–50%, much smaller than those reported for dogs. Comparisons of the patterns of mechanical energy fluctuation suggested that the potential and kinetic energies oscillated relatively more in-phase, and amplitudes did not attain near equality during quadrupedal walking in Japanese macaques, possibly because of greater weight support (reaction force) of the hindlimbs and more protracted forelimbs at touchdown in the Japanese macaque, two of the three commonly accepted locomotor characteristics distinguishing primates from non-primate mammals.






Similar content being viewed by others

References
Ahn AN, Furrow E, Biewener AA (2004) Walking and running in the red-legged running frog, Kassina maculata. J Exp Biol 207:399–410
Blickhan R, Full RJ (1993) Mechanical work in terrestrial locomotion. In: Biewener AA (ed) Biomechanics: structures and systems. Oxford University Press, New York, pp 75–96
Cartmill M, Lemelin P, Schmitt D (2002) Support polygons and symmetrical gaits in mammals. Zool J Linn Soc 136:401–420
Cavagna GA (1975) Force platforms as ergometers. J Appl Physiol 39:174–179
Cavagna GA, Heglund NC, Taylor CR (1977) Mechanical work in terrestrial locomotion—2 basic mechanisms for minimizing energy-expenditure. Am J Physiol 233:R243–R261
Delson E, Terranova CJ, Jungers WL, Sargos EJ, Jablonski NG, Dechow PC (2000) Body mass in Cercopithecidae (Primates, Mammalia): estimation and scaling in extinct and extant taxa (Anthropological Papers of the American Museum of Natural History No. 83). Am Mus Nat Hist, New York
Demes B, Larson SG, Stern JT, Jungers WL, Biknevicius AR, Schmitt D (1994) The kinetics of primate quadrupedalism—hindlimb drive reconsidered. J Hum Evol 26:353–374
Farley CT, Ko TC (1997) Mechanics of locomotion in lizards. J Exp Biol 200:2177–2188
Griffin TM, Kram R (2000) Penguin waddling is not wasteful. Nature 408:929
Griffin TM, Main RP, Farley CT (2004) Biomechanics of quadrupedal walking: how do four-legged animals achieve inverted pendulum-like movements? J Exp Biol 207:3545–3558
Heglund NC, Cavagna GA, Taylor CR (1982) Energetics and mechanics of terrestrial locomotion. 3. Energy changes of the center of mass as a function of speed and body size in birds and mammals. J Exp Biol 97:41–56
Hildebrand M (1967) Symmetrical gaits of primates. Am J Phys Anthropol 26:119–130
Hirasaki E, Ogihara N, Hamada Y, Kumakura H, Nakatsukasa M (2004) Do highly trained monkeys walk like humans? A kinematic study of bipedal locomotion in bipedally trained Japanese macaques. J Hum Evol 46:739–750
Kimura T, Okada M, Ishida H (1979) Kinesiological characteristics of primate walking: its significance in human walking. In: Morbeck M, Preuschoft H, Gomberg N (eds) Environment, behavior, and morphology: dynamic interactions in primates. Gustav Fischer, New York, pp 297–312
Larney E, Larson SG (2004) Compliant walking in primates: elbow and knee yield in primates compared to other mammals. Am J Phys Anthropol 125:42–50
Larson SG, Schmitt D, Lemelin P, Hamrick M (2000) Uniqueness of primate forelimb posture during quadrupedal locomotion. Am J Phys Anthropol 112:87–101
Minetti AE, Ardigo LP, Reinach E, Saibene F (1999) The relationship between mechanical work and energy expenditure of locomotion in horses. J Exp Biol 202:2329–2338
Nakatsukasa M, Ogihara N, Hamada Y, Goto Y, Yamada M, Hirakawa T, Hirasaki E (2004) Energetic costs of bipedal and quadrupedal walking in Japanese macaques. Am J Phys Anthropol 124:248–256
Nakatsukasa M, Hirasaki E, Ogihara N (2006) Energy expenditure of bipedal walking is higher than that of quadrupedal walking in Japanese macaques. Am J Phys Anthropol 131:33–37
Ogihara N, Usui H, Hirasaki E, Hamada Y, Nakatsukasa M (2005) Kinematic analysis of bipedal locomotion of a Japanese macaque that lost its forearms due to congenital malformation. Primates 46:11–19
Ogihara N, Hirasaki E, Kumakura H, Nakatsukasa M (2007) Ground-reaction-force profiles of bipedal walking in bipedally trained Japanese monkeys. J Hum Evol 53:302–308
Ogihara N, Makishima H, Aoi S, Sugimoto Y, Tsuchiya K, Nakatsukasa M (2009) Development of an anatomically based whole-body musculoskeletal model of the Japanese macaque (Macaca fuscata). Am J Phys Anthropol 139:323–338
Ogihara N, Makishima H, Nakatsukasa M (2010) Three-dimensional musculoskeletal kinematics during bipedal locomotion in the Japanese macaque, reconstructed based on an anatomical model-matching method. J Hum Evol 58:252–261
Pfau T, Witte TH, Wilson AM (2006) Centre of mass movement and mechanical energy fluctuation during gallop locomotion in the thoroughbred racehorse. J Exp Biol 209:3742–3757
Prost JH (1969) A replication study on monkey gaits. Am J Phys Anthropol 30:203–208
Ren L, Hutchinson JR (2008) The three-dimensional locomotor dynamics of African (Loxodonta africana) and Asian (Elephas maximus) elephants reveal a smooth gait transition at moderate speed. J R Soc Interface 5:195–211
Rubenson J, Heliams DB, Lloyd DG, Fournier PA (2004) Gait selection in the ostrich: mechanical and metabolic characteristics of walking and running with and without an aerial phase. Proc R Soc Lond B 271:1091–1099
Schmitt D, Lemelin P (2002) Origins of primate locomotion: gait mechanics of the woolly opossum. Am J Phys Anthropol 118:231–238
Usherwood JR, Williams SB, Wilson AM (2007) Mechanics of dog walking compared with a passive, stiff-limbed, 4-bar linkage model, and their collisional implications. J Exp Biol 210:533–540
Vilensky JA, Larson SG (1989) Primate locomotion—utilization and control of symmetrical gaits. Ann Rev Anthropol 18:17–35
Willey JS, Biknevicius AR, Reilly SM, Earls KD (2004) The tale of the tail: limb function and locomotor mechanics in Alligator mississippiensis. J Exp Biol 207:553–563
Acknowledgments
We wish to express our gratitude to the staff at Suo Monkey Performance Association for their generous collaboration in the experiments. We are also grateful to Sugio Hayama, Hidemi Ishida, Kazumichi Katayama, and Nobutoshi Yamazaki for their continuous guidance and support throughout the course of the present study. We are also grateful to anonymous reviewers for their constructive and thoughtful comments. This study was supported by a Grant-in-Aid for Scientific Research on Priority Areas “Emergence of Adaptive Motor Function through Interaction between Body, Brain and Environment” from the Japanese Ministry of Education, Culture, Sports, Science and Technology.
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Ogihara, N., Makishima, H., Hirasaki, E. et al. Inefficient use of inverted pendulum mechanism during quadrupedal walking in the Japanese macaque. Primates 53, 41–48 (2012). https://doi.org/10.1007/s10329-011-0265-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10329-011-0265-3