
Abstract
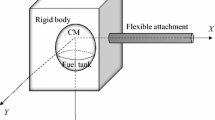
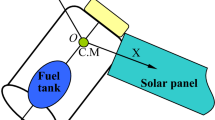
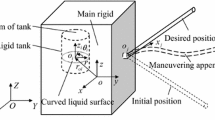
From the Lagrangian side of geometric mechanics, the dynamics, relative equilibria, and stability analysis for a rigid spacecraft coupled with liquid propellant, flexible appendage, and momentum wheel are studied. The liquid propellant nonlinear sloshing is equivalently modeled by a 3D rigid pendulum, which can effectively imitate the large-amplitude lateral sloshing accompanied by liquid rotation-starting, rotary sloshing, and spin motion of partially filled liquid in a closed cylindrical or spherical tank. The flexible attachment is modeled as a geometrically exact rod, which can accommodate arbitrarily large deformations in three dimensions, including extension, shear, bending, and twist. The global and coordinate-free dynamical equations are derived from the perspective of Lagrangian geometry. According to the principle of symmetric criticality, the relative equilibria and associated properties are investigated. Finally, in terms of the energy–momentum method and block diagonalization technique, the formal stability conditions for particular relative equilibria of the coupled spacecraft system are obtained.


Similar content being viewed by others
Abbreviations
- h :
-
virtual hanging point of 3D rigid pendulum
- l :
-
length of pendulum rod
- d :
-
fixed position of frozen fuel respective to the centroid of fuel tank
- B 1 :
-
attitude matrix of spacecraft platform
- B 2 :
-
attitude matrix of 3D rigid pendulum
- B r(s):
-
attitude matrix of cross-section at s position of geometrically exact rod
- B r(s):
-
attitude matrix of cross-section s of geometrically exact rod
- \(\varphi_0\) :
-
position vector of center of mass of system
- \(\varphi_1\) :
-
position vector of spacecraft platform
- \(\varphi_2\) :
-
position vector of 3D rigid pendulum
- \(\varphi_f\) :
-
position vector of frozen fuel
- \(\varphi_r\) :
-
position vector of cross-section s of geometrically exact rod
- l 0 :
-
installation position of geometrically exact rod
- \({L}\) :
-
length of geometrically exact rod
- \(\rho_r\) :
-
density of of geometrically exact rod
- \(\phi\) :
-
rotation angle of the rotor
- \(\varvec{\varOmega}\) :
-
body angular velocity
- \({\varvec{\omega_{\phi}}},{\varvec{\varPhi}}\) :
-
angular velocity of rotor
- V r :
-
potential energy of geometrically exact rod
- y(·):
-
stored energy function of s cross-section of geometrically exact rod
- n(s, t):
-
force of s cross-section of geometrically exact rod
- m(s, t):
-
moment of s cross-section of geometrically exact rod
- Q :
-
configuration manifold
- TQ :
-
tangent bundle of Q
- SO(3):
-
special orthogonal group
- TSO(3):
-
tangent bundle of special orthogonal group
- TTSO(3):
-
second tangent bundle of special orthogonal group
- T*TQ :
-
cotangent bundle of TSO(3)
- G :
-
Lie group
- \(\mathfrak{g}\) :
-
Lie algebra
- \(\mathfrak{g}^*\) :
-
dual Lie algebra
- \(\varvec{\xi}_0\) :
-
infinitesimal generator
- I lock(q):
-
locked inertia tensor
- \(\ll\cdot,\cdot\gg\) :
-
Riemannian metric
- \(\langle \cdot,\cdot \rangle\) :
-
duality pairing between \(\mathfrak{g}^*\) and \(\mathfrak{g}\)
- Y(q):
-
gyroscopic field
- I Y(q):
-
gyro-momentum
- \({V_\xi}(q)\) :
-
amended potential energy
- I ° lock(q):
-
locked inertia dyadic
- I°Y(q):
-
gyro-momentum dyadic
- \({\varvec{\mu}}_{\text e}={\varvec{\tilde{J}}}(q_{\text e},\xi)\) :
-
pre-momentum mapping at relative equilibria
- \(\mathfrak{g}_\mu\) :
-
isotropy subalgebra
- \({{\mathfrak{g}^\bot_{\mu}}_{\text {e}}}\) :
-
orthogonal complement of isotropy subalgebra
- V :
-
space of admissible configuration variations modulo variations
- V RIG :
-
space of “rigid” configuration variations
- V INT :
-
space of “internal” configuration variations
- \({\varvec{\omega}}_s\) :
-
spatial rotating angular velocity of system
- \(\varXi\) :
-
filled ratio of propellant
References
Dodge, F. T. The new dynamic behavior of liquids in moving containers, Southwest Research Inst, San Antonio, TX, (2000).
Ibrahim, R. A. Liquid sloshing dynamics: theory and applications. Cambridge University Press, (2005).
Kana, D.D.: Validated spherical pendulum model for rotary liquid slosh. J. Spacecr. Rocket. 26(3), 188–195 (1989)
Yue, B.Z.: Study on the chaotic dynamics in attitude maneuver of liquid-filled flexible spacecraft. AIAA J. 49(10), 2090–2099 (2011)
Miao, N., Li, J.F., Wang, T.S.: Equivalent mechanical model of large-amplitude liquid sloshing under time-dependent lateral excitations in low-gravity conditions. J. Sound Vib. 386, 421–432 (2017)
Kang, J.Y., Lee, S.: Attitude acquisition of a satellite with a partially filled liquid tank. J. Guid. Control. Dyn. 31(3), 790–793 (2008)
Deng, M.L., Yue, B.Z.: Nonlinear model and attitude dynamics of flexible spacecraft with large amplitude slosh. Acta Astronaut. 133, 111–120 (2017)
Tang, Y., Yue, B.Z.: Simulation of large-amplitude three-dimensional liquid sloshing in spherical tanks. AIAA J. 55(6), 2052–2059 (2017)
Liu, F., Yue, B.Z., Tang, Y., et al.: 3DOF-rigid-pendulum analogy for nonlinear liquid slosh in spherical propellant tanks. J. Sound Vib. 460, 1–15 (2019)
Abraham, R., Marsden, J. E. Foundations of Mechanics, 2nd ed. (Benjamin/Cummings, Reading) (1978).
Holm, D. D. Geometric mechanics-Part I: Dynamics and symmetry. World Scientific Publishing Company, (2011).
Wang, L.S., Krishnaprasad, P.S.: Gyroscopic control and stabilization. J. Nonlin. Sci. 2(4), 367–415 (1992)
Ardakani, H.A., Bridges, T.J., Gay-Balmaz, F., et al.: A variational principle for fluid sloshing with vorticity, dynamically coupled to vessel motion. Proc. Royal Soc. A. 475(2224), 20180642 (2019)
Holm, D.D., Marsden, J.E., Ratiu, T., et al.: Nonlinear stability of fluid and plasma equilibria. Phys. Rep. 123(1–2), 1–116 (1985)
Krishnaprasad, P.S., Marsden, J.E.: Hamiltonian structures and stability for rigid bodies with flexible attachments. Arch. Ration. Mech. Anal. 98(1), 71–93 (1987)
Ozcazanc, Y. Dynamics and Stability of Spacecraft with Fluid-Filled Containers. Ph. D. thesis, University of Maryland, (1994).
Salman, A., Yue, B.Z.: Bifurcation and Stability Analysis of the Hamiltonian-Casimir Model of Liquid Sloshing. Chin. Phys. Lett. 29(6), 060501 (2012)
Yan, Y.L., Yue, B.Z.: Analytical method for the attitude stability of partially liquid filled spacecraft with flexible appendage. Acta. Mech. Sin. 33(1), 208–218 (2017)
Nichkawde, C., Harish, P. M., Ananthkrishnan, N.: Stability analysis of a multibody system model for coupled slosh-vehicle dynamics. J. Sound Vib. 275(3–5), 1069–1083 (2004). https://doi.org/10.1016/j.jsv.2003.07.009
Gasbarri, P., Sabatini, M., Pisculli, A.: Dynamic modelling and stability parametric analysis of a flexible spacecraft with fuel slosh. Acta. Astronaut. 127, 141–159 (2016). https://doi.org/10.1016/j.actaastro.2016.05.018
Simo, J.C., Posbergh, T.A., Marsden, J.E.: Stability of coupled rigid body and geometrically exact rods: block diagonalization and the energy-momentum method. Phys. Rep. 193(6), 279–360 (1990)
Simo, J.C., Lewis, D., Marsden, J.E.: Stability of relative equilibria. Part I: The reduced energy-momentum method. Arch. Ration. Mech. Anal. 115(1), 15–59 (1991)
Simo, J.C., Posbergh, T.A., Marsden, J.E.: Stability of relative equilibria. Part II: Application to nonlinear elasticity. Arch. Ration. Mech. Anal. 115(1), 61–100 (1991)
Vershik, A. M., Faddeev, L. D. Lagrangian mechanics in invariant form. 40 Years. In Mathematical Physics, 427–438, (1995).
Marsden, J. E., Ratiu, T. S. Introduction to Mechanics and Symmetry: A Basic Exposition of Classical Mechanical Systems, Springer Science & Business Media, (2013).
Wang, L. S. Geometry, Dynamics and Control of Coupled Systems. Ph. D. thesis, University of Maryland, (1990).
Grossman, R., Krishnaprasad, P. S., Marsden, J. E. The dynamics of two coupled rigid bodies. Dynamical Systems Approaches to Nonlinear Problems in Systems and Circuits, (1987).
Sreenath, N., Oh, Y.G., Krishnaprasad, P.S., et al.: The dynamics of coupled planar rigid bodies. Part I: Reduction, equilibria and stability. Dyn. Stab. Syst. 3(1–2), 25–49 (1988)
Krishnaprasad, P.S.: Lie-Poisson structures, dual-spin spacecraft and asymptotic stability. Nonlinear Anal. Theory Methods Appl. 9(10), 1011–1035 (1985)
Ge, X.S., Yi, Z.G., Chen, L.Q.: Optimal control of attitude for coupled-rigid-body spacecraft via Chebyshev-Gauss pseudospectral method. Appl. Math. Mech. 38(9), 1257–1272 (2017)
Shi, D.H., Zenkov, D.V., Bloch, A.M.: Hamel’s formalism for classical field theories. J. Nonlin. Sci. 30(1), 1–47 (2020)
Bloch, A.M.: Nonholonomic Mechanics and Control. Springer, New York (2003)
Lewis, D.: Lagrangian block diagonalization. J. Dyn. Diff. Equat. 4(1), 1–41 (1992)
Marsden, J.E., Simo, J.C., Lewis, D., et al.: Block diagonalization and the energy-momentum method. Dynamics and control of multibody systems. Contemp. Math. 97, 297–313 (1989)
Marsden, J.E., Weinstein, A.: Reduction of symplectic manifolds with symmetry. Rep. Math. Phys. 5(1), 121–130 (1974)
Yi, Z.G., Yue, B.Z., Deng, M.L.: Hamilton-Pontryagin spectral-collocation methods for the orbit propagation. Acta. Mech. Sin. (2021). https://doi.org/10.1007/s10409-021-01138-3
Yue, B.Z., Yang, D.D.: Study on the global chaotic dynamics and control of liquid-filled spacecraft with flexible appendage. Acta Mech. 209(1–2), 11–25 (2010)
Acknowledgements
We are particularly grateful to Associated Professor Donghua Shi for valuable discussions, especially for the energy-momentum method. This work was supported by the National Natural Science Foundation of China (Grant Nos: 12132002, 11772049).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yi, Z., Yue, B. Study on the dynamics, relative equilibria, and stability for liquid-filled spacecraft with flexible appendage. Acta Mech 233, 3557–3578 (2022). https://doi.org/10.1007/s00707-022-03269-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-022-03269-5