
Abstract
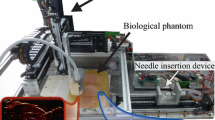
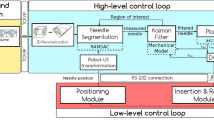
This paper presents a robotic control method for 3D steering of a beveled-tip flexible needle. The solution is based on a new duty-cycling control strategy that makes possible to control three degrees of freedom of the needle. A visual servoing control scheme using two orthogonal cameras observing a translucent phantom is then proposed to automatically steer a needle toward a 3D target point. Experimental results show a final positioning error of 0.4 mm and demonstrate the feasibility of this promising approach and its robustness to model errors.
Chapter PDF
Similar content being viewed by others

References
Reed, K., Majewicz, A., Kallem, V., Alterovitz, R., Goldberg, K., Cowan, N., Okamura, A.: Robot-assisted needle steering. IEEE Robotics and Automation Magazine 18(4), 35–46 (2011)
Webster III, R., Kim, J., Cowan, N., Chirikjian, G., Okamura, A.M.: Nonholonomic modeling of needle steering. The International Journal of Robotics Research 25(5-6), 509–525 (2006)
Misra, S., Reed, K., Schafer, B., Ramesh, K., Okamura, A.: Mechanics of flexible needles robotically steered through soft tissue. The International Journal of Robotics Research 29(13), 1640–1660 (2010)
Alterovitz, R., Goldberg, K., Okamura, A.: Planning for steerable bevel-tip needle insertion through 2D soft tissue with obstacles. In: IEEE Int. Conf on Robotics and Automation, pp. 1640–1645 (2005)
LaValle, S., Kuffner, J.: Randomized kinodynamic planning. In: IEEE Int. Conf. on Robotics and Automation, vol. 1, pp. 473–479 (1999)
Alterovitz, R., Siméon, T., Goldberg, K.: The stochastic motion roadmap: A sampling framework for planning with markov motion uncertainty. In: Burgard, W., et al. (eds.) Robotics: Science and Systems III, pp. 233–241. MIT Press (2008)
Minhas, D., Engh, J., Fenske, M., Riviere, C.: Modeling of needle steering via duty-cycled spinning. In: IEEE Int. Conf. on Engineering in Medicine and Biology Society, pp. 2756–2759 (2007)
Wood, N., Shahrour, K., Ost, M., Riviere, C.: Needle steering system using duty-cycled rotation for percutaneous kidney access. In: IEEE Int. Conf on Engineering in Medicine and Biology Society (EMBS), pp. 5432–5435 (2010)
Xu, J., Duindam, V., Alterovitz, R., Goldberg, K.: Motion planning for steerable needles in 3D environments with obstacles using rapidly-exploring random trees and backchaining. In: IEEE Int. Conf on Automation Science and Engineering, pp. 41–46 (2008)
Bernardes, M., Adorno, B., Poignet, P., Borges, G.: Robot-assisted automatic insertion of steerable needles with closed-loop imaging feedback and intraoperative trajectory replanning. Mechatronics 23, 630–645 (2013)
Chaumette, F., Hutchinson, S.: Visual servo control, part i: Basic approaches. IEEE Robotics and Automation Magazine 13(4), 82–90 (2006)
Uhercik, M., Kybic, J., Liebgott, H., Cachard, C.: Model fitting using ransac for surgical tool localization in 3-D ultrasound images. IEEE Trans. on Biomedical Engineering 57(8), 1907–1916 (2010)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this paper
Cite this paper
Krupa, A. (2014). 3D Steering of a Flexible Needle by Visual Servoing. In: Golland, P., Hata, N., Barillot, C., Hornegger, J., Howe, R. (eds) Medical Image Computing and Computer-Assisted Intervention – MICCAI 2014. MICCAI 2014. Lecture Notes in Computer Science, vol 8673. Springer, Cham. https://doi.org/10.1007/978-3-319-10404-1_60
Download citation
DOI: https://doi.org/10.1007/978-3-319-10404-1_60
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-10403-4
Online ISBN: 978-3-319-10404-1
eBook Packages: Computer ScienceComputer Science (R0)