
Abstract
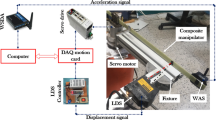
In this study, vibration control of a single-link flexible smart composite manipulator (FSCM) is experimentally studied. The experimental system includes a real-time data acquisition control card, accelerometer, amplifier, servo motor, and driver. The FSCM is an epoxy-glass composite manipulator with the piezoelectric actuator and has the orientation of [0/90] lay-up. Modal analysis is experimentally conducted to find the natural frequencies by applying a chirp signal to the piezoelectric actuator. Natural frequencies are found by taking the Fast Fourier Transform (FFT) in MATLAB. Triangular motion profiles are used to drive the FSCM. Motion parameters are found by utilizing the natural frequencies of the system for different deceleration times (tdec). with different deceleration times (tdec). Residual vibrations are suppressed by using PID control with acceleration feedback. The acceleration signals at the tip point are measured by utilizing the accelerometer. The controller gains are determined with the trial and error method. Experimental residual vibration results are presented for the active control. It is observed that the suppression of vibration amplitudes further increases with active control.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Tokhi, M.O., Azad, A.K.M.: Flexible robot manipulators modelling, simulation and control, vol. 86. The Institution of Engineering and Technology (2017)
Rigatos, G., Busawon, K.: Robotic manipulators and vehicles: control, estimation and filtering. Springer International Publishing AG (2018)
Mitra, M., Gopalakrishnan, S., Bhat, M.S.: Vibration control in a composite box beam with piezoelectric actuators. Smart Mater. Struct. 13(4), 676–690 (2004)
Ramkumar, K., Chandran, S., Ganesan, N.: Finite element analysis of composite box structure containing piezoelectric actuators and sensors for active vibration control. In: SAE Technical Paper, pp. 1–6 (2009)
Yavuz, S., Malgaca, L., Karagülle, H.: Vibration control of a single-link flexible composite manipulator. Compos. Struct. 140, 684–691 (2016)
Yavuz, S.: An enhanced method to control the residual vibrations of a single-link flexible glass fabric reinforced epoxy-glass composite manipulator. Compos. B Eng. 159, 405–417 (2019)
Malgaca, L., Uyar, M.: Hybrid vibration control of a flexible composite box cross-sectional manipulator with piezoelectric actuators. Compos. Part B: Eng. 176(2) (2019)
Ma, K., Ghasemi-Nejhad, M.N.: Adaptive control of flexible active composite manipulators driven by piezoelectric patches and active struts with dead zones. IEEE Trans. Control Syst. Technol. 16(5), 897–907 (2008)
National Intruments Inc.: https://www.ni.com. Accessed 01 Apr 2021
MicroStrain Inc.: http://www.microstrain.com/wireless/sensors. Accessed 01 Apr 2021
Acknowledgements
This study is supported by Dokuz Eylül University—Department of Scientific Research Projects with the research project with project number 2020.KB.FEN.009. The authors offer their special thanks to Dokuz Eylül University Research Fund for giving support.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Uyar, M., Malgaca, L., Lök, Ş., Can, S.V. (2022). Experimental Active Vibration Control of a Highly Flexible Composite Manipulator with Acceleration Feedback. In: Herisanu, N., Marinca, V. (eds) Acoustics and Vibration of Mechanical Structures – AVMS-2021. Springer Proceedings in Physics, vol 274. Springer, Cham. https://doi.org/10.1007/978-3-030-96787-1_25
Download citation
DOI: https://doi.org/10.1007/978-3-030-96787-1_25
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-96786-4
Online ISBN: 978-3-030-96787-1
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)