
Abstract
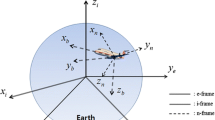
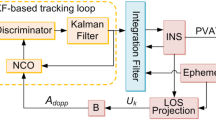
The architecture of the ultra-tight GPS/INS/PL integration is the key to its successful performance; the main feature of this architecture is the Doppler feedback to the GPS receiver tracking loops. This Doppler derived from INS, when integrated with the carrier tracking loops, removes the Doppler due to vehicle dynamics from the GPS/PL signal thereby achieving a significant reduction in the carrier tracking loop bandwidth. The bandwidth reduction provides several advantages such as: improvement in anti-jamming performance, and increase in post correlated signal strength which in turn increases the dynamic range and accuracy of measurements. Therefore, any degradation in the derived Doppler estimates will directly affect the tracking loop bandwidth and hence its performance. The quadrature signals from the receiver correlator, I (in-phase) and Q (quadrature), form the measurements, whereas the inertial sensor errors, position, velocity and attitude errors form the states of the complementary Kalman filter. To specify a reliable measurement model of the filter for this type of integrated system, a good understanding of GPS/PL signal characteristics is essential. It is shown in this paper that phase and frequency errors are the variables that relate the measurements and the states in the Kalman filter. The main focus of this paper is to establish the fundamental mathematical relationships that form the measurement model, and to show explicitly how the system error states are related to the GPS/PL signals. The derived mathematical relationships encapsulated in a Kalman filter, are tested by simulation and shown to be valid.




Similar content being viewed by others
References
Abbott S, Lillo WE (2003) Global Positioning System Inertial Measurement using Ultratight coupling method, US Patent # 6,516,021
Babu R, Wang J (2005) Analysis of INS-derived Doppler effects on carrier tracking loop. J Navig 58(3):493–507. doi:10.1017/S0373463305003309
Barnes J, Rizos C, Kanli M, Small D, Voigt G, Gambale N, Lamance J, Nunan T, Reid C (2004) Indoor industrial machine guidance using Locata: a pilot study at BlueScope Steel. In: 60th annual meeting of the US Institute of Navigation, Dayton, Ohio, 7–9 June, pp 533–540
Bar-Itzhack IY, Berman N (1988) Control theoretic approach to inertial navigation systems. AIAA J Guid Control Dyn 11:237–245. doi:10.2514/3.20299
Beser J, Alexander S, Crane R, Rounds S, Wyman J, Baeder B (2002) Trunav™: a low-cost guidance/navigation unit integrating a SAASM-based GPS and MEMS IMU in a deeply coupled mechanization. In: 15th International technical meeting of the satellite division of the US Institute of Navigation, Portland, 24–27 September, pp 545–555
Cahn RC, Leimer DK, Marsh CL, Huntowski FJ, Larue GD (1977) Software implementation of a PN spread spectrum receiver to accommodate dynamics. IEEE Trans Commun 25(8):832–839. doi:10.1109/TCOM.1977.1093904
Gustafson D, Dowdle J (2003) Deeply integrated code tracking: comparative performance analysis. In: 16th International technical meeting of the satellite division of the US Institute of Navigation, Portland, 9–12 September, pp 2553–2561
Jee GI et al (2002) A GPS C/A code tracking loop based on extended kalman filter with multipath mitigation. In: 15th International technical meeting of the satellite division of the US Institute of Navigation, Portland, 24–27 September, pp 446–451
Jwo D-J (2001) Optimization and sensitivity analysis of GPS receiver tracking loops in dynamic environments. IEE Proc Radar Sonar Navig 148:241–250. doi:10.1049/ip-rsn:20010429
Kee C, Yun D, Jun H, Parkinson B, Pullen S, Lagenstein T (2001) Centimeter-accuracy indoor navigation using GPS-like pseudolites. GPS World 12(11):14–22
Lee HK, Wang J, Rizos C, Grejner-Brzezinska D (2004) Analyzing the impact of integrating Pseudolite observations into a GPS/INS system. J Surv Eng 130(2):95–103. doi:10.1061/(ASCE)0733-9453(2004)130:2(95)
Lee HK, Wang J, Rizos C (2005) An integer ambiguity resolution procedure for GPS/Pseudolite/INS integration. J Geod 79:242–255. doi:10.1007/s00190-005-0466-x
Maybeck PS (1979) Stochastic models, estimation, and control, volume I. Academic Press, New York
Ohlmeyer EJ (2006) Analysis of an ultra-tightly coupled GPS/INS system in jamming. IEEE 44–53
Sennott JW, Senffner D (1992) The use of satellite geometry for prevention of cycle slips in a GPS processor. Navig J Inst Navig 39:217–235
Sennott J, Senffner D (1997) Robustness of tightly coupled integrations for real-time centimeter GPS positioning. In: 10th International technical meeting of the satellite division of the US institute of navigation, Kansas City, 16–19 September, pp 655–663
Spilker (1996) Fundamentals of signal tracking theory. In: Global positioning system: theory and applications, Chap. 7. AIAA
Wang J, Dai L, Tsuiji T, Rizos C, Grejner-Brzezinska D, Toth C (2001) GPS/INS/Pseudolite integration: concepts, simulation and testing. In: 14th International technical meeting of the satellite division of the US Institte of Navigation, Salt Lake City, 11–14 September, pp 2708–2715
Wang J (2002) Pseudolite applications in positioning and navigation: progress and problems. J Glob Positioning Syst 1:48–56
Ward P (1998) Performance comparisons between FLL, PLL and a novel FLL-assisted PLL carrier tracking loop under RF interference conditions. In: 11th International technical meeting of the satellite division of the US Institute of Navigation, Nashville, 15–18 September, pp 783–795
Wong RVC (1988) Development of a RLG strapdown inertial navigation system, PhD Thesis, USCE Report Number 20027, Department of Geomatics Engineering, The University of Calgary
Van DAJ, Fenton P, Ford T (1992) Theory and performance of narrow correlator spacing in a GPS receiver. Navig J Inst Navig 39:265–283
Yun D, Kee C (2002) Centimeter accuracy stand-alone indoor navigation system by synchronized Pseudolite constellation. In: 15th International technical meeting of the satellite division of the US Institute of Navigation, Portland, 24–27 September, pp 213–225
Acknowledgments
This research is supported by an ARC (Australian Research Council)—Discovery Research Project on ‘Robust Positioning Based on Ultra-tight Integration of GPS, Pseudolites and Inertial Sensors’. The authors would like to thank the Editor-in-Chief Professor Alfred Leick, and the reviewers Dr. Mark Petovello and Dr. Alexey Zhdanov for their valuable comments on the previous versions of this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Babu, R., Wang, J. Ultra-tight GPS/INS/PL integration: a system concept and performance analysis. GPS Solut 13, 75–82 (2009). https://doi.org/10.1007/s10291-008-0097-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-008-0097-9