
Abstract
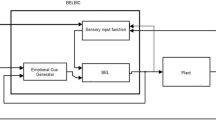
The applicability of a brain emotional learning-based intelligent controller (BELBIC) is based on the emotion processing mechanism in brain, sensory inputs and emotional cues. The inspiration of this intelligent controller is the computational model of limbic system in the mammalian brain. In the thematic literature, some stability analyses for BELBIC are presented. Most of them are dealing with some specific systems or mathematical models of these systems are required. In this study, a more general stability analysis for the BELBIC is proposed that can be simply applied to the tracking control of a large group of nonlinear systems. The novelty and main contributions of this study are treating the BELBIC as an uncertainty estimator to pave the way for stability analysis. The control law comprises a model-free control approach. The satisfactory performance of the proposed method is proved by numerical simulations on an induction motor and comparison with a neuro-fuzzy controller. The considerable influence of the BELBIC in uncertainty estimation and reducing the tracking error is also verified by an experimental study on a SCARA manipulator. In addition, to highlight the superiority of BELBIC in practical implementations, a comparison with a controller using an adaptive uncertainty estimator has been presented.






















Similar content being viewed by others


References
Izadbakhsh A, Khorashadizadeh S (2017) Robust task-space control of robot manipulators using differential equations for uncertainty estimation. Robotica 35:1923–1938
Puga-Guzman S, Moreno-Valenzuela J, Santibanez V (2014) Adaptive neural network motion control of manipulators with experimental evaluations. Sci World J 2014:694–706
Hsu CF (2014) Adaptive backstepping Elman-based neural control for unknown nonlinear systems. Neurocomputing (Supplement C) 136:170–179
Chen CY, Gui WH, Guan ZH, Wang RL, Zhou SW (2017) Adaptive neural control for a class of stochastic nonlinear systems with unknown parameters, unknown nonlinear functions and stochastic disturbances. Neurocomputing (Supplement C) 226:101–108
Modares H, Lewis FL, Naghibi-Sistani MB (2013) Adaptive optimal control of unknown constrained-input systems using policy iteration and neural. Networks 24:1513–1525
Yong K, Chen M, Wu Q (2018) Constrained adaptive neural control for a class of nonstrict-feedback nonlinear systems with disturbances. Neurocomputing 272:405–415
Purwar S, Kar IN, Jha AN (2004) Adaptive control of robot manipulators using fuzzy logic systems under actuator constraints. In: IEEE international conference on fuzzy systems (IEEE Cat. No.04CH37542). vol 3, pp 1449–1454
Hwang JP, Kim E (2006) Robust tracking control of an electrically driven robot: adaptive fuzzy logic approach. IEEE Trans Fuzzy Syst 14:232–247
Fateh MM, Khorashadizadeh S (2012) Robust control of electrically driven robots by adaptive fuzzy estimation of uncertainty. Nonlinear Dyn 69(3):1465–1477
Khorashadizadeh S, Sadeghijaleh M (2018) Adaptive fuzzy tracking control of robot manipulators actuated by permanent magnet synchronous motors. Comput Electr Eng 72:100–111
Abu-Khalaf M, Lewis FL, Huang J (2006) Policy iterations on the Hamilton–Jacobi–Isaacs equation for \(H_{infty}\) state feedback control with input saturation. IEEE Trans Autom Control 51:1989–1995
Khan SG, Herrmann G, Lewis FL, Pipe T, Melhuish C (2012) Reinforcement learning and optimal adaptive control: an overview and implementation examples. Annu Rev Control 36:42–59
Lucas C, Shahmirzadi D, Sheikholeslami N (2004) Introducing belbic: brain emotional learning based intelligent controller. Taylor & Francis, London, pp 11–21
Lucas C, Abbaspour A, Gholipour A, Araabi BN, Fatourechi M (2003) Enhancing the performance of neurofuzzy predictors by emotional learning algorithm. Inform Ljubl 27:137–146
Lucas C, Rashidi F, Abdi J (2004) Transient stability improvement in power systems via firing angle control of TCSC using context based emotional controller. Autom Congr 16:37–42
Farhangi R, Boroushaki M, Hosseini SH (2012) Load-frequency control of interconnected power system using emotional learning-based intelligent controller. Int J Electr Power Energy Syst 36:76–83
Fatourechi M, Lucas C, Sedigh AK (2001) Reducing control effort by means of emotional learning. In: Proceedings of 19th Iranian conference on electrical engineering. vol 41, pp 1–4
Lucas C, Langari R, Shahmirzadi D (2004) Stabilization of a control system with sensor time delays using brain emotional learning. In: Special session on emotional learning and decision fusion in satisficing control and information processing, mini symposium on satisficing, multiagent, and cyberlearning systems, 5th international symposium on intelligent automation and control. World Automation Congress, WAC
Milasi RM, Lucas C, Araabi BN (2005) Intelligent modeling and control of washing machine using LLNF modeling and modified BELBIC. Control Autom (ICCA’05) 2:812–817
Jalili-Kharaajoo M (2004) Application of brain emotional learning based intelligent controller (BELBIC) to active queue management. In: International conference on computational science. pp 662–665
Mehrabian AR, Lucas C, Roshanian J (2006) Aerospace launch vehicle control: an intelligent adaptive approach. Aerosp Sci Technol 10:149–155
Rahman MA, Milasi RM, Lucas C, Araabi BN, Radwan TS (2008) Implementation of emotional controller for interior permanent-magnet synchronous motor drive. IEEE Trans Ind Appl 44:1466–1476
Dashti ZAS, Gholami M, Hajimani M (2017) Brain emotional learning based intelligent controller for velocity control of an electro hydraulic servo system. IOSR J. Electr. Electron. Eng. 12:29–35
Klecker S, Plapper P (2016) BELBIC-sliding mode control of robotic manipulators with uncertainties and switching constraints. In: Proceedings of the ASME, international mechanical engineering congress and exposition
Klecker S, Hichri B, Plapper P (2017) Robust BELBIC-extension for trajectory tracking control. J Mech Eng Autom 7:84–93
Sheikholeslami N, Shahmirzadi D, Semsar E, Lucas C, Yazdanpanah MJ (2006) Applying brain emotional learning algorithm for multivariable control of HVAC systems. J Intell Fuzzy Syst 17:35–46
Khorashadizadeh S, Mahdian M (2016) Voltage tracking control of DC–DC boost converter using brain emotional learning. In: Control, instrumentation, and automation (ICCIA-2016), 4th international conference. pp 268–272
Fateh MM, Khorashadizadeh S (2012) Optimal robust voltage control of electrically driven robot manipulators. Nonlinear Dyn 70:1445–1458
Shahnazi R, Shanechi HM, Pariz N (2008) Position control of induction and DC servomotors: a novel adaptive fuzzy PI sliding mode control. IEEE Trans Energy Convers 23:138–147
Vahedi M, Zarif MH, Kalat AA (2015) A simple stable adaptive neuro-fuzzy speed controller for induction motors. J Intell Fuzzy Syst 29:571–581
Ahmadi SM, Fateh MM (2016) Robust control of electrically driven robots using adaptive uncertainty estimation. Comput Electr Eng 56:674–687
Khorashadizadeh S, Fateh MM (2015) Robust task-space control of robot manipulators using Legendre polynomials for uncertainty estimation. Nonlinear Dyn 79:1151–1161
Fateh MM, Azargoshasb S, Khorashadizadeh S (2014) Model-free discrete control for robot manipulators using a fuzzy estimator. In: COMPEL: The international journal for computation and mathematics in electrical and electronic engineering. vol 33, pp 1051–1067
Mark WS, Mathukumalli V (2008) Robot dynamics and control. Wiley, Hoboken
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
There is no any conflict of interest to declare.
Additional information
Technical Editor: Victor Juliano De Negri, D.Eng.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Khorashadizadeh, S., Zadeh, S.M.H., Koohestani, M.R. et al. Robust model-free control of a class of uncertain nonlinear systems using BELBIC: stability analysis and experimental validation. J Braz. Soc. Mech. Sci. Eng. 41, 311 (2019). https://doi.org/10.1007/s40430-019-1824-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-019-1824-6