
Abstract
In the field of condition monitoring the availability of a real test-bench is not so common. Furthermore, the early validation of a new diagnostic technique on a proper simulated signal is crucial and a fundamental step in order to provide a feedback to the researcher and to increase the chances of getting a positive result in the real case. In this context, the aim of this paper is to detail a step-by-step analytical model of faulted bearing that the reader could freely and immediately use to simulate different faults and different operating conditions. The vision of the project is a set of tools accepted by the community of researchers on condition monitoring, for the preliminary validation of new diagnostics techniques. The tool proposed in this paper is focused on ball bearing, and it is based on the well-known model published by Antoni in 2007. The features available are the following: selection of the location of the fault, stage of the fault, cyclostationarity of the signal, random contributions, deterministic contributions, effects of resonances in the machine and working conditions (stationary and non-stationary). The script is provided for the open-source Octave environment. The output signal is finally analysed to prove the expected features.












Similar content being viewed by others

Abbreviations
- B(t):
-
Function which takes into account the purely cyclostationary content
- \(COV\{ \cdot \}\) :
-
Covariance
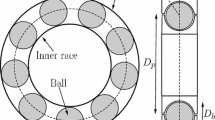
- D :
-
Pitch circle diameter
- \(E\{\cdot \}\) :
-
Expectation operator
- F :
-
Amplitude of the force exciting the SDOF system
- L :
-
Vector length
- SNR :
-
Signal-to-noise ratio
- \(P_{noise}\) :
-
Noise poser
- \(P_{signal}\) :
-
Signal power without noise
- T :
-
Inter-arrival time between two consecutive impacts
- d :
-
Bearing roller diameter
- \(f_c\) :
-
Carrier component of the rotation frequency
- \(f_d\) :
-
Frequency deviation of the rotation frequency
- \(f_m\) :
-
Frequency modulation of the rotation frequency
- \(f_r(\theta )\) :
-
Angular dependent rotation frequency
- \(f_s\) :
-
Sample frequency
- h(t):
-
Impulse response to a single impact measured by the sensor
- k :
-
SDOF system stiffness
- l :
-
Vector index
- m :
-
SDOF system mass
- p(t):
-
Function which takes into account periodic component
- \(p_{rot}(\theta )\) :
-
Deterministic part related to the rotation speed in the angular domain
- \(p_{stiff}(\theta )\) :
-
Deterministic part related to the stiffness variation in the angular domain
- q(t):
-
Function which takes into account load distribution, bearing unbalance and periodic changes in the impulse response
- \(q_{rot}\) :
-
Positive number which weight the amplitude of \(p_{rot}(\theta )\)
- \(q_{stiff}\) :
-
Positive number which weights the amplitude of \(p_{stiff}(\theta )\)
- \(q_{Fault}\) :
-
Positive number governing the amplitude of the modulating function related to distributed fault
- n(t):
-
Background noise
- \(n_r\) :
-
Number of rolling elements
- x(t):
-
Simulated vibration signal
- \(x_{SDOF}(t)\) :
-
Time response of a SDOF system to unit impulse
- \(\beta\) :
-
Contact angle
- \(\delta\) :
-
Kronecker’s symbol
- \(\Delta \theta _{imp}\) :
-
Angular position of a series of equispaced impulses
- \(\Delta T_i\) :
-
ith inter-arrival time
- \(\Delta \theta _i\) :
-
ith angle between two consecutive impulses
- \(\varepsilon\) :
-
Error term
- \(\omega _n\) :
-
Natural frequency of the SDOF system
- \(\omega _d\) :
-
Damped natural frequency of the SDOF system
- \(\sigma ^2\) :
-
Standard deviation
- \(\tau _i\) :
-
Inter-arrival time jitters of the ith impact
- \(\tau _{stiff}\) :
-
Geometrical bearing parameter related to the stiffness variation
- \(\tau _{Fault}\) :
-
Geometrical bearing parameter related to the fault
- \(\theta\) :
-
Angular variable
- \(\zeta\) :
-
Damping coefficient of the SDOF system
References
El-Thalji I, Jantunen E (2015) A summary of fault modelling and predictive health monitoring of rolling element bearings. Mech Syst Signal Process 60:252–272
McFadden PD, Smith JD (1984) Vibration monitoring of rolling element bearings by the high frequency resonance technique a review. Tribol Int 117:3–10
McFadden PD, Smith JD (1984) Model for the vibration produced by a single point defect. J Sound Vib 96:69–82
McFadden PD, Smith JD (1984) The vibration produced by multiple point defects in a rolling element bearing. J Sound Vib 98:263–273
Taylor JI (1980) Identification of bearing defects by spectral analysis. J Mech Des 102:199–204
Su YT, Lin SJ (1992) On initial detection of a tapered roller bearing frequency domain analysis. J Sound Vib 155:75–84
Ho D, Randall RB (2000) Optimisation of bearing diagnostic techniques using simulated and actual bearing fault signals. Mech Syst Signal Process 14:763–788
Antoni J, Randall RB (2002) Differential diagnosis of gear and bearing faults. J Vib Acoust 124:165–171
Antoni J, Randall RB (2003) A stochastic model for simulation and diagnostics of rolling element bearings with localized faults. J Vib Acoust 125:282–289
Randall RB, Antoni J, Chobsaard S (2001) The relationship between spectral correlation and envelope analysis in the diagnostics of bearing faults and other cyclostationary machine signals. Mech Syst Signal Process 15:945–962
Gardner WA (1986) Introduction to random processes with application to signals and systems. Macmillan, New York
Bourdon A, André H, Rémond D (2014) Introducing angularly periodic disturbances in dynamic models of rotating systems under non-stationary conditions. Mech Syst Signal Process 44:60–71
D’Elia G, Daher Z, Antoni J (2010) A novel approach for the cyclo-non-stationary analysis of speed varying signals. In: Proceedings of the ISMA 2010. September 22–27, Leuven, Belgium
Antoni J (2007) Cyclic spectral analysis of rolling-element bearing signals: facts and fictions. J Sound Vib 304:497–529
D’Elia G, Delvecchio S, Coccconcelli M , Mucchi E, Dalpiaz G (2013) Application of cyclostationary indicators for the diagnostics of distributed faults in ball bearings. In: Proceedings of the ASME 2013 international design engineering technical conferences & computers and information in engineering conference IDETC/CIE 2013. August 4–7 Portland
Roberts JB (1966) On the reponse of a simple oscillator to random impulses. J Sound Vib 4:51–61
Abbod D, Baudin S, Antoni J, Rémond D, Eltabach M, Sauvage O (2016) The spectral analysis of cyclo-non-stationary signals. Mech Syst Signal Process 75:280–300
Data-acoustics.com, Inner and outer race bearing fault vibration measurements. http://data-acoustics.com/?p=202
Acknowledgements
Acknowledgement is made for the measurements used in this work provided through data-acoustics.com Database. In particular, the authors thank Prof. Gareth Forbes at Department of Mechanical Engineering of Curtin University (Australia), who provided the experimental data through Creative Commons Attribution 4.0 International License.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Appendix: Octave code
Appendix: Octave code






Rights and permissions
About this article

Cite this article
D’Elia, G., Cocconcelli, M. & Mucchi, E. An algorithm for the simulation of faulted bearings in non-stationary conditions. Meccanica 53, 1147–1166 (2018). https://doi.org/10.1007/s11012-017-0767-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-017-0767-1