
Abstract
In this paper, dynamic behavior of the rough spherical micro/nanoparticles during pulling/pushing on the flat substrate has been investigated and analyzed. For this purpose, at first, two hexagonal roughness models (George and Cooper) were studied and then evaluations for adhesion force were determined for rough particle manipulation on flat substrate. These two models were then changed by using of the Rabinovich theory. Evaluations were determined for contact adhesion force between rough particle and flat substrate; depth of penetration evaluations were determined by the Johnson–Kendall–Roberts contact mechanic theory and the Schwartz method and according to Cooper and George roughness models. Then, the novel contact theory was used to determine a dynamic model for rough micro/nanoparticle manipulation on flat substrate. Finally, simulation of particle dynamic behavior was implemented during pushing of rough spherical gold particles with radii of 50, 150, 400, 600, and 1,000 nm. Results derived from simulations of particles with several rates of roughness on flat substrate indicated that compared to results for flat particles, inherent roughness on particles might reduce the rate of critical force needed for sliding and rolling given particles. Given a fixed radius for roughness value and increased roughness height, evaluations for sliding and rolling critical forces showed greater reduction. Alternately, the rate of critical force was shown to reduce relative to an increased roughness radius. With respect to both models, based on the George roughness model, the predicted rate of adhesion force was greater than that determined in the Cooper roughness model, and as a result, the predicted rate of critical force based on the George roughness model was closer to the critical force value of flat particle.












Similar content being viewed by others

Abbreviations
- A :
-
Contact area
- a :
-
Contact radius
- A H :
-
Hamaker constant
- A s :
-
Contact area between the particle/substrate
- A t :
-
Contact area between the tip/particle
- D :
-
Lennard–Jones equilibrium distance
- E :
-
Young moduli (elastic moduli)
- F ad :
-
Adhesion force
- F s :
-
Particle/substrate force in contact area
- f s :
-
Friction force in particle/substrate
- F T :
-
Pushing force
- F t :
-
Tip/particle force in contact area
- f t :
-
Friction force in tip/particle
- F Y :
-
Lateral force of the tip
- F y :
-
Lateral force of the cantilever
- F Z :
-
Normal force of the tip
- F z :
-
Normal force of the cantilever
- \( F_{\text{r}}^{*} \) :
-
Critical rolling forces of nanoparticle on substrate
- \( F_{\text{s}}^{*} \) :
-
Critical sliding forces of nanoparticle on substrate
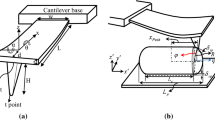
- H :
-
Probe height
- h :
-
Roughness height profile
- I p :
-
Moment of inertia
- K :
-
Reduced or effective elastic modulus
- K P :
-
Coefficient relating to the rms roughness
- K y :
-
Lateral stiffness
- K z :
-
Normal stiffness
- L :
-
Length of the cantilever
- m :
-
Mass of AFM tip
- M θ :
-
Torsional torque of the cantilever
- n :
-
Distance of center points of roughness from each other
- r :
-
Radius of the asperity
- r 1 :
-
Horizontal asperitie of any radius of the asperity
- R p :
-
Nanoparticle radius
- R t :
-
Spherical tip radius
- rms:
-
Root mean square
- t :
-
Thickness of the cantilever
- TNA:
-
Number of asperities in contact
- v stage :
-
Substrate velocity
- w :
-
Width of the cantilever
- y p :
-
Horizontal deflection of the probe
- y max :
-
Maximum value of peak height
- y sub. :
-
Horizontal displacement of substrate
- y T :
-
Horizontal displacement of tip
- z p :
-
Vertical deflection of the probe
- z sub. :
-
Vertical displacement of substrate
- z T :
-
Vertical displacement of tip
- α :
-
Angle formed between any radius and vertical axis
- γ :
-
Adhesion energy
- δ :
-
Penetration depth
- δ s :
-
Contact deformations between the particle/substrate
- δ t :
-
Contact deformations between the particle/tip
- θ :
-
Torsion angle of cantilever
- λ :
-
Peak-to-peak distance
- μ :
-
Constant friction coefficients
- μ s :
-
Static frictional constant
- μ d :
-
Dynamic frictional constant
- \( \mu_{{{\text{r}}_{\text{s}} }} \) :
-
Frictional of constant in rolling between nanoparticle/substrate
- \( \mu_{{{\text{r}}_{\text{t}} }} \) :
-
Frictional of constant in rolling between tip/nanoparticle
- ν :
-
Poisson’s ratio
- φ :
-
Tip/nanoparticle contact angle
- τ :
-
Shear strength
- τ s :
-
Shear strength of contact in sliding
- τ rs :
-
Shear strength of contact in rolling between nanoparticle/substrate
- τ rt :
-
Shear strength of contact in rolling between tip/nanoparticle
- Ψ:
-
Pushing force angle
References
H. Xie et al., Atomic Force Microscopy Based Nanorobotics: Modelling, Simulation, Setup Building and Experiments (Springer, Berlin, 2011), p. 360
H. Miyazaki, T. Sato, Mechanical assembly of three-dimensional microstructures from fine particles. Adv. Robot. 11(2), 169–185 (1996)
D.M. Schaefer et al., Fabrication of two-dimensional arrays of nanometer-size clusters with the atomic force microscope. Appl. Phys. Lett. 66(8), 1012–1014 (1995)
M. Sitti, H. Hashimoto, Two-dimensional fine particle positioning using a piezoresistive cantilever as a micro/nano-manipulator, in Proceedings of the 999 IEEE International Conference on Robotics and Automation, 1999 (1999)
M. Falvo et al., Manipulation of individual viruses: friction and mechanical properties. Biophys. J. 72(3), 1396–1403 (1997)
U.D. Schwarz, A generalized analytical model for the elastic deformation of an adhesive contact between a sphere and a flat surface. J. Colloid Interface Sci. 261(1), 99–106 (2003)
M. Sitti, H. Hashimoto, Controlled pushing of nanoparticles: modeling and experiments. Mechatronics, IEEE/ASME Transactions on 5(2), 199–211 (2000)
D.H. Kim, J. Park, B. Kim, K. Kim, Modeling and simulation of nano robotic nano manipulation with an AFM probe, in ICCAS (Muju Resort, Jeonbuk, Korea, 2002)
A. Tafazzoli, M. Sitti, Dynamic behavior and simulation of nanoparticle sliding during nanoprobe-based positioning. Methods 19, 32 (2004)
A. Tafazzoli, M. Sitti, Dynamic modes of nanoparticle motion during nanoprobe-based manipulation, in 4th IEEE Conference on Nanotechnology, 2004 (2004)
M.H. Korayem, M. Zakeri, Sensitivity analysis of nanoparticles pushing critical conditions in 2-D controlled nanomanipulation based on AFM. Int. J. Adv Manuf Technol 41(7–8), 714–726 (2009)
M.H. Korayem, M. Zakeri, Dynamic modeling of manipulation of micro/nanoparticles on rough surfaces. Appl. Surf. Sci. 257(15), 6503–6513 (2011)
Y.I. Rabinovich et al., Adhesion between nanoscale rough surfaces: I. Role of asperity geometry. J. Colloid Interface Sci. 232(1), 10–16 (2000)
Y.I. Rabinovich et al., Adhesion between nanoscale rough surfaces: II. Measurement and comparison with theory. J. Colloid Interface Sci. 232(1), 17–24 (2000)
D. Pathak, R. Bedi, D. Kaur, Effect of Substrate Temperature on the Structural, Optical, and Electrical Properties of Silver–Indium–Selenide Films Prepared by Using Laser Ablation (2010)
K. Cooper et al., Analysis of contact interactions between a rough deformable colloid and a smooth substrate. J. Colloid Interface Sci. 222(1), 63–74 (2000)
K.N.G. Fuller, D. Tabor, The effect of surface roughness on the adhesion of elastic solids. Proc. R. Soc. Lond.: A. Math. Phys. Sci. 345(1642), 327–342 (1975)
S.K. Das, R.S. Schechter, M.M. Sharma, The role of surface roughness and contact deformation on the hydrodynamic detachment of particles from surfaces. J. Colloid Interface Sci. 164(1), 63–77 (1994)
E. Beach et al., Pull-off force measurements between rough surfaces by atomic force microscopy. J. Colloid Interface Sci. 247(1), 84–99 (2002)
M. George, D. Goddard, The characterisation of rough particle contacts by atomic force microscopy. J. Colloid Interface Sci. 299(2), 665–672 (2006)
M.A. Felicetti et al., Influence of Particle size, applied compression, and substratum material on particle–surface adhesion force using the centrifuge technique. Ind. Eng. Chem. Res. 48(2), 877–887 (2008)
S. Bhattacharjee, C.-H. Ko, M. Elimelech, DLVO Interaction between Rough Surfaces. Langmuir 14(12), 3365–3375 (1998)
L. Suresh, J.Y. Walz, Effect of surface roughness on the interaction energy between a colloidal sphere and a flat plate. J. Colloid Interface Sci. 183(1), 199–213 (1996)
J. Czarnecki, T. Dabroś, Attenuation of the van der Waals attraction energy in the particlesemi-infinite medium system due to the roughness of the particle surface. J. Colloid Interface Sci. 78(1), 25–30 (1980)
M. Sparnaay, Four notes on van der waals forces. Induction effect, nonadditivity, attraction between a cone and a flat plate (asperities), history. J. Colloid Interface Sci. 91(2), 307–319 (1983)
Ş. Ţălu, et al., Multifractal characterization of water soluble copper phthalocyanine based films surfaces. Electron. Mater. Lett. 10(4), 719–730 (2014)
M. Götzinger, W. Peukert, Particle Adhesion Force Distributions on Rough Surfaces. Langmuir 20(13), 5298–5303 (2004)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zakeri, M., Faraji, J. Modeling of the rough spherical nanoparticles manipulation on a substrate based on the AFM nanorobot. Appl. Phys. A 117, 1947–1962 (2014). https://doi.org/10.1007/s00339-014-8668-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00339-014-8668-9